JP5594923B2 - 基板面高さ測定方法及びその装置 - Google Patents
基板面高さ測定方法及びその装置 Download PDFInfo
- Publication number
- JP5594923B2 JP5594923B2 JP2006177595A JP2006177595A JP5594923B2 JP 5594923 B2 JP5594923 B2 JP 5594923B2 JP 2006177595 A JP2006177595 A JP 2006177595A JP 2006177595 A JP2006177595 A JP 2006177595A JP 5594923 B2 JP5594923 B2 JP 5594923B2
- Authority
- JP
- Japan
- Prior art keywords
- height
- measuring
- triangular
- substrate surface
- height measurement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000758 substrate Substances 0.000 title claims description 133
- 238000000034 method Methods 0.000 title claims description 47
- 238000005259 measurement Methods 0.000 claims description 251
- 238000005286 illumination Methods 0.000 claims description 30
- 238000004364 calculation method Methods 0.000 claims description 24
- 230000035945 sensitivity Effects 0.000 claims description 7
- 230000001678 irradiating effect Effects 0.000 claims description 4
- 238000003384 imaging method Methods 0.000 claims description 3
- 239000004020 conductor Substances 0.000 description 5
- 238000001514 detection method Methods 0.000 description 5
- 238000006073 displacement reaction Methods 0.000 description 5
- 239000011521 glass Substances 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 5
- 238000000691 measurement method Methods 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 2
- 239000003822 epoxy resin Substances 0.000 description 2
- 229920003023 plastic Polymers 0.000 description 2
- 229920000647 polyepoxide Polymers 0.000 description 2
- 229910000679 solder Inorganic materials 0.000 description 2
- 230000000694 effects Effects 0.000 description 1
- 238000013213 extrapolation Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 230000003595 spectral effect Effects 0.000 description 1
Images









Landscapes
- Length Measuring Devices By Optical Means (AREA)
Description
z=x/tan θ
ここで、θは、スリット光15の光軸と基板位置認識カメラ14の光軸との交差角度である。
Claims (13)
- 回路基板の実装面(以下単に「基板面」という)の任意の測定対象点の高さを測定する基板面高さ測定方法において、
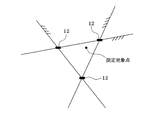
前記基板面に設定された4個以上の高さ測定点の中から隣り合う3個の高さ測定点を選択し、当該3個の高さ測定点を頂点とする三角形領域を形成する処理を繰り返して前記基板面を複数の三角形領域に分割する三角形領域分割工程と、
前記複数の三角形領域の中から実際に高さを測定しようとする測定対象点が含まれる三角形領域を選択し、当該三角形領域の3個の頂点となる3個の高さ測定点の高さを高さ測定手段により測定し、当該3個の高さ測定点の高さ測定値に基づいて当該三角形領域内の測定対象点の高さを補間計算により算出する工程とを含み、
前記三角形領域分割工程において、一辺を共通にする三角形領域の候補が複数存在する場合に他の2辺のうちの長い方の辺が最も短い三角形領域の候補を有効な三角形領域として選択することを特徴とすることを特徴とする基板面高さ測定方法。 - 回路基板の実装面(以下単に「基板面」という)の任意の測定対象点の高さを測定する基板面高さ測定方法において、
前記基板面に設定された4個以上の高さ測定点の中から隣り合う3個の高さ測定点を選択し、当該3個の高さ測定点を頂点とする三角形領域を形成する処理を繰り返して前記基板面を複数の三角形領域に分割する三角形領域分割工程と、
前記複数の三角形領域の中から実際に高さを測定しようとする測定対象点が含まれる三角形領域を選択し、当該三角形領域の3個の頂点となる3個の高さ測定点の高さを高さ測定手段により測定し、当該3個の高さ測定点の高さ測定値に基づいて当該三角形領域内の測定対象点の高さを補間計算により算出する工程とを含み、
前記三角形領域分割工程において、一辺を共通にする三角形領域の候補が複数存在する場合に他の2辺の合計長さが最も短い三角形領域の候補を有効な三角形領域として選択することを特徴とすることを特徴とする基板面高さ測定方法。 - 回路基板の実装面(以下単に「基板面」という)の任意の測定対象点の高さを測定する基板面高さ測定方法において、
前記基板面に設定された4個以上の高さ測定点の中から隣り合う3個の高さ測定点を選択し、当該3個の高さ測定点を頂点とする三角形領域を形成する処理を繰り返して前記基板面を複数の三角形領域に分割する三角形領域分割工程と、
前記複数の三角形領域の中から実際に高さを測定しようとする測定対象点が含まれる三角形領域を選択し、当該三角形領域の3個の頂点となる3個の高さ測定点の高さを高さ測定手段により測定し、当該3個の高さ測定点の高さ測定値に基づいて当該三角形領域内の測定対象点の高さを補間計算により算出する工程とを含み、
前記三角形領域分割工程において、1個の高さ測定点を共通の頂点とする三角形領域の候補が複数存在する場合に3辺の合計長さ又は最長辺が最も短い三角形領域の候補を有効な三角形領域として選択することを特徴とすることを特徴とする基板面高さ測定方法。 - 回路基板の実装面(以下単に「基板面」という)の任意の測定対象点の高さを測定する基板面高さ測定方法において、
前記基板面に設定された4個以上の高さ測定点を高さ測定手段により測定する高さ測定工程と、
前記4個以上の高さ測定点の中から隣り合う3個の高さ測定点を選択し、当該3個の高さ測定点を頂点とする三角形領域を形成する処理を繰り返して前記基板面を複数の三角形領域に分割する三角形領域分割工程と、
前記複数の三角形領域の中から実際に高さを測定しようとする測定対象点が含まれる三角形領域を選択し、当該三角形領域の3個の頂点となる3個の高さ測定点の高さ測定値に基づいて当該三角形領域内の測定対象点の高さを補間計算により算出する工程とを含み、 前記三角形領域分割工程において、一辺を共通にする三角形領域の候補が複数存在する場合に他の2辺のうちの長い方の辺が最も短い三角形領域の候補を有効な三角形領域として選択することを特徴とすることを特徴とする基板面高さ測定方法。 - 回路基板の実装面(以下単に「基板面」という)の任意の測定対象点の高さを測定する基板面高さ測定方法において、
前記基板面に設定された4個以上の高さ測定点を高さ測定手段により測定する高さ測定工程と、
前記4個以上の高さ測定点の中から隣り合う3個の高さ測定点を選択し、当該3個の高さ測定点を頂点とする三角形領域を形成する処理を繰り返して前記基板面を複数の三角形領域に分割する三角形領域分割工程と、
前記複数の三角形領域の中から実際に高さを測定しようとする測定対象点が含まれる三角形領域を選択し、当該三角形領域の3個の頂点となる3個の高さ測定点の高さ測定値に基づいて当該三角形領域内の測定対象点の高さを補間計算により算出する工程とを含み、 前記三角形領域分割工程において、一辺を共通にする三角形領域の候補が複数存在する場合に他の2辺の合計長さが最も短い三角形領域の候補を有効な三角形領域として選択することを特徴とすることを特徴とする基板面高さ測定方法。 - 回路基板の実装面(以下単に「基板面」という)の任意の測定対象点の高さを測定する基板面高さ測定方法において、
前記基板面に設定された4個以上の高さ測定点を高さ測定手段により測定する高さ測定工程と、
前記4個以上の高さ測定点の中から隣り合う3個の高さ測定点を選択し、当該3個の高さ測定点を頂点とする三角形領域を形成する処理を繰り返して前記基板面を複数の三角形領域に分割する三角形領域分割工程と、
前記複数の三角形領域の中から実際に高さを測定しようとする測定対象点が含まれる三角形領域を選択し、当該三角形領域の3個の頂点となる3個の高さ測定点の高さ測定値に基づいて当該三角形領域内の測定対象点の高さを補間計算により算出する工程とを含み、 前記三角形領域分割工程において、1個の高さ測定点を共通の頂点とする三角形領域の候補が複数存在する場合に3辺の合計長さ又は最長辺が最も短い三角形領域の候補を有効な三角形領域として選択することを特徴とすることを特徴とする基板面高さ測定方法。 - 前記基板面に対してスリット光を斜め上方から前記高さ測定点に跨がるように照射するスリット照明手段と、前記基板面の真上から前記スリット光の照射部分を撮像するカメラとを使用し、
前記高さ測定手段は、前記カメラで撮像した前記スリット光と前記高さ測定点とが重なる部分の位置と前記スリット光の照射角度とに基づいて当該高さ測定点の高さを算出することを特徴とする請求項1乃至6のいずれかに記載の基板面高さ測定方法。 - 前記スリット照明手段は、前記スリット光を紫外光により形成し、
前記カメラは、紫外光領域に感度を持つ紫外光カメラであることを特徴とする請求項7に記載の基板面高さ測定方法。 - 回路基板の実装面(以下単に「基板面」という)の任意の測定対象点の高さを測定する基板面高さ測定装置において、
前記基板面に設定された4個以上の高さ測定点の高さを測定する高さ測定手段と、
前記4個以上の高さ測定点の中から隣り合う3個の高さ測定点を選択し、当該3個の高さ測定点を頂点とする三角形領域を形成する処理を繰り返して前記基板面を複数の三角形領域に分割する三角形領域分割手段と、
前記複数の三角形領域の中から実際に高さを測定しようとする測定対象点が含まれる三角形領域を選択し、当該三角形領域の3個の頂点となる3個の高さ測定点の高さ測定値に基づいて当該三角形領域内の測定対象点の高さを補間計算により算出する補間計算手段とを含み、
前記三角形領域分割手段は、一辺を共通にする三角形領域の候補が複数存在する場合に他の2辺のうちの長い方の辺が最も短い三角形領域の候補を有効な三角形領域として選択することを特徴とすることを特徴とする基板面高さ測定装置。 - 回路基板の実装面(以下単に「基板面」という)の任意の測定対象点の高さを測定する基板面高さ測定装置において、
前記基板面に設定された4個以上の高さ測定点の高さを測定する高さ測定手段と、
前記4個以上の高さ測定点の中から隣り合う3個の高さ測定点を選択し、当該3個の高さ測定点を頂点とする三角形領域を形成する処理を繰り返して前記基板面を複数の三角形領域に分割する三角形領域分割手段と、
前記複数の三角形領域の中から実際に高さを測定しようとする測定対象点が含まれる三角形領域を選択し、当該三角形領域の3個の頂点となる3個の高さ測定点の高さ測定値に基づいて当該三角形領域内の測定対象点の高さを補間計算により算出する補間計算手段とを含み、
前記三角形領域分割手段は、一辺を共通にする三角形領域の候補が複数存在する場合に他の2辺の合計長さが最も短い三角形領域の候補を有効な三角形領域として選択することを特徴とすることを特徴とする基板面高さ測定装置。 - 回路基板の実装面(以下単に「基板面」という)の任意の測定対象点の高さを測定する基板面高さ測定装置において、
前記基板面に設定された4個以上の高さ測定点の高さを測定する高さ測定手段と、
前記4個以上の高さ測定点の中から隣り合う3個の高さ測定点を選択し、当該3個の高さ測定点を頂点とする三角形領域を形成する処理を繰り返して前記基板面を複数の三角形領域に分割する三角形領域分割手段と、
前記複数の三角形領域の中から実際に高さを測定しようとする測定対象点が含まれる三角形領域を選択し、当該三角形領域の3個の頂点となる3個の高さ測定点の高さ測定値に基づいて当該三角形領域内の測定対象点の高さを補間計算により算出する補間計算手段とを含み、
前記三角形領域分割手段は、1個の高さ測定点を共通の頂点とする三角形領域の候補が複数存在する場合に3辺の合計長さ又は最長辺が最も短い三角形領域の候補を有効な三角形領域として選択することを特徴とすることを特徴とする基板面高さ測定装置。 - 前記基板面に対してスリット光を斜め上方から前記高さ測定点に跨がるように照射するスリット照明手段と、前記基板面の真上から前記スリット光の照射部分を撮像するカメラとを備え、
前記高さ測定手段は、前記カメラで撮像した前記スリット光と前記高さ測定点とが重なる部分の位置と前記スリット光の照射角度とに基づいて当該高さ測定点の高さを算出することを特徴とする請求項9乃至11のいずれかに記載の基板面高さ測定装置。 - 前記スリット照明手段は、前記スリット光を紫外光で形成し、
前記カメラは、紫外光領域に感度を持つ紫外光カメラであることを特徴とする請求項12に記載の基板面高さ測定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006177595A JP5594923B2 (ja) | 2005-12-08 | 2006-06-28 | 基板面高さ測定方法及びその装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005354291 | 2005-12-08 | ||
| JP2005354291 | 2005-12-08 | ||
| JP2006177595A JP5594923B2 (ja) | 2005-12-08 | 2006-06-28 | 基板面高さ測定方法及びその装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007183239A JP2007183239A (ja) | 2007-07-19 |
| JP5594923B2 true JP5594923B2 (ja) | 2014-09-24 |
Family
ID=38339457
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006177595A Active JP5594923B2 (ja) | 2005-12-08 | 2006-06-28 | 基板面高さ測定方法及びその装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5594923B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5276297B2 (ja) * | 2007-10-12 | 2013-08-28 | 新東エスプレシジョン株式会社 | 二次元座標測定機 |
| JP5218177B2 (ja) * | 2009-03-13 | 2013-06-26 | オムロン株式会社 | 画像処理装置および方法 |
| JP5461224B2 (ja) * | 2010-02-23 | 2014-04-02 | 日本電信電話株式会社 | 補間装置、補間方法およびプログラム |
| JP5834317B2 (ja) | 2011-05-11 | 2015-12-16 | 株式会社ミツトヨ | 誤差画像生成方法 |
| JP2013140082A (ja) * | 2012-01-05 | 2013-07-18 | Fuji Mach Mfg Co Ltd | 高さ測定装置及び高さ測定方法 |
| JP6485616B2 (ja) * | 2014-06-04 | 2019-03-20 | 三菱重工業株式会社 | 外観計測システム、画像処理方法及びプログラム |
| JP2015163902A (ja) * | 2015-06-03 | 2015-09-10 | ヤマハファインテック株式会社 | 回路基板の電気検査方法及び電気検査装置 |
| CN116295046B (zh) * | 2023-02-20 | 2023-12-19 | 上海赫立智能机器有限公司 | 电路板板载元器件的回字形高度测量方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2838968B2 (ja) * | 1994-01-31 | 1998-12-16 | 日本電気株式会社 | 半導体デバイスシミュレータのメッシュ生成方法 |
| JPH08320947A (ja) * | 1995-05-25 | 1996-12-03 | Matsushita Electric Ind Co Ltd | 数値解析用メッシュ作成方法及び装置 |
| JP3463843B2 (ja) * | 1996-03-29 | 2003-11-05 | ソニー株式会社 | 自由曲面生成装置および自由曲面生成方法 |
| JP3384329B2 (ja) * | 1998-06-22 | 2003-03-10 | 富士ゼロックス株式会社 | 3次元画像撮影装置 |
| US6384826B1 (en) * | 1998-08-14 | 2002-05-07 | Xerox Corporation | Method, apparatus and computer medium for surface reconstruction by Voronoi filtering |
| JP2003518672A (ja) * | 1999-12-27 | 2003-06-10 | アルコア・ネーデルランド・ベー・ブイ | 押し出し過程のメッシュ発生用のメッシュ発生器とその方法 |
| JP3764857B2 (ja) * | 2001-07-06 | 2006-04-12 | 日産自動車株式会社 | 被測定面の局所的変形検出方法 |
| JP2003114121A (ja) * | 2001-10-04 | 2003-04-18 | Mitsutoyo Corp | 測定データの照合方法、その照合装置およびその照合プログラム |
| JP2004037274A (ja) * | 2002-07-03 | 2004-02-05 | Sumitomo Osaka Cement Co Ltd | 高さ計測装置及び監視装置 |
| JP4153761B2 (ja) * | 2002-09-19 | 2008-09-24 | 成典 田中 | 3次元モデル空間生成装置、3次元モデル空間生成方法、及び3次元モデル空間生成プログラム |
| JP3799419B2 (ja) * | 2002-12-02 | 2006-07-19 | 関西ティー・エル・オー株式会社 | 非接触力学特性測定システム |
| JP2005030793A (ja) * | 2003-07-08 | 2005-02-03 | Matsushita Electric Ind Co Ltd | 基板検査装置および検査方法 |
-
2006
- 2006-06-28 JP JP2006177595A patent/JP5594923B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007183239A (ja) | 2007-07-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5594923B2 (ja) | 基板面高さ測定方法及びその装置 | |
| JP5421763B2 (ja) | 検査装置および検査方法 | |
| US10816322B2 (en) | Bonding apparatus and method for detecting height of bonding target | |
| US20100315655A1 (en) | Method And Device For Measuring A Height Difference | |
| JP2003279334A (ja) | 三次元計測装置、フィルタ格子縞板及び照明手段 | |
| JPH07311025A (ja) | 3次元形状検査装置 | |
| CN102233468B (zh) | 倾斜检查装置和倾斜检查方法 | |
| JP7135418B2 (ja) | 平坦度検出方法、平坦度検出装置及び平坦度検出プログラム | |
| JP4808072B2 (ja) | フィルタ格子縞板、三次元計測装置及び照明手段 | |
| CN103247548B (zh) | 一种晶圆缺陷检测装置及方法 | |
| JP2015197361A (ja) | 表面検査装置および表面検査方法 | |
| JP2009092485A (ja) | 印刷半田検査装置 | |
| US20080291468A1 (en) | Apparatus and method for measuring height of protuberances | |
| JP2009036736A (ja) | 印刷半田検査方法及び装置 | |
| KR101158324B1 (ko) | 형상 검사장치 | |
| CN109690408A (zh) | 基板角位置确定方法 | |
| JP2013228264A (ja) | 突出部高さ測定装置 | |
| JP2011169816A (ja) | 半導体装置の接合傾き測定装置 | |
| US10458778B2 (en) | Inline metrology on air flotation for PCB applications | |
| JP2013140082A (ja) | 高さ測定装置及び高さ測定方法 | |
| WO2019180899A1 (ja) | 外観検査装置 | |
| KR101745883B1 (ko) | 인쇄회로기판의 광학 검사 장치 및 방법 | |
| KR20200026245A (ko) | 촬상 장치, 범프 검사 장치 및 촬상 방법 | |
| JP7000380B2 (ja) | 三次元計測装置及び三次元計測方法 | |
| JP2007184417A (ja) | プローブカードの取り付け位置ずれの検出方法及びプローバ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090409 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110721 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110804 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110915 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120719 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120910 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130527 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140805 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5594923 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |