JP5593249B2 - 自動調心式固定振れ止め - Google Patents
自動調心式固定振れ止め Download PDFInfo
- Publication number
- JP5593249B2 JP5593249B2 JP2011023796A JP2011023796A JP5593249B2 JP 5593249 B2 JP5593249 B2 JP 5593249B2 JP 2011023796 A JP2011023796 A JP 2011023796A JP 2011023796 A JP2011023796 A JP 2011023796A JP 5593249 B2 JP5593249 B2 JP 5593249B2
- Authority
- JP
- Japan
- Prior art keywords
- steady rest
- shaft
- electric motor
- pin
- workpiece
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000033001 locomotion Effects 0.000 claims abstract description 62
- 230000006835 compression Effects 0.000 claims description 14
- 238000007906 compression Methods 0.000 claims description 14
- 230000005540 biological transmission Effects 0.000 claims description 8
- 238000005259 measurement Methods 0.000 claims 1
- 230000008878 coupling Effects 0.000 abstract 2
- 238000010168 coupling process Methods 0.000 abstract 2
- 238000005859 coupling reaction Methods 0.000 abstract 2
- 230000007704 transition Effects 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 239000010720 hydraulic oil Substances 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B13/00—Arrangements for automatically conveying or chucking or guiding stock
- B23B13/08—Arrangements for reducing vibrations in feeding-passages or for damping noise
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q1/00—Members which are comprised in the general build-up of a form of machine, particularly relatively large fixed members
- B23Q1/72—Auxiliary arrangements; Interconnections between auxiliary tables and movable machine elements
- B23Q1/76—Steadies; Rests
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B13/00—Arrangements for automatically conveying or chucking or guiding stock
- B23B13/12—Accessories, e.g. stops, grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B25/00—Accessories or auxiliary equipment for turning-machines
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T82/00—Turning
- Y10T82/25—Lathe
- Y10T82/2593—Work rest
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T82/00—Turning
- Y10T82/25—Lathe
- Y10T82/2593—Work rest
- Y10T82/2597—Center rest
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Gripping On Spindles (AREA)
- Jigs For Machine Tools (AREA)
- Machine Tool Units (AREA)
- Transition And Organic Metals Composition Catalysts For Addition Polymerization (AREA)
- Photoreceptors In Electrophotography (AREA)
- Medicines Containing Antibodies Or Antigens For Use As Internal Diagnostic Agents (AREA)
- Automobile Manufacture Line, Endless Track Vehicle, Trailer (AREA)
Description
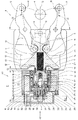
2 ハウジング
3 長手方向の軸
4 ワークピース
5 保持要素
6 保持要素
7 保持要素
8 中片部
9 制御面
10 内側端
11 ワークピース接触要素
12 収容開口部
13 ネジ穴
14 ねじ込みスピンドル
15 伝達要素
16 保持ピン
18 カバー
19 固定ベアリング
20 ルーズベアリング
21 電気モータ
22 ステータ
23 ロータ
24 フランジ
25 ボルト
26 シャフト
27 外部歯車装置
28 内部歯車装置
29 中空シャフト
30 雄ネジ
31 雌ネジ
32 くぼみ
32’ 傾斜表面
33 ピン
34 穴
35 穴
36 コイル状圧縮バネ
37 ボール
38 ノッチ
39 ピン
40 自由端
41 ベルクランクレバー
42 ジョイント
43 ウェブ
43’ 自由端
44 ウェブ
44’ 自由端
45 皿形バネ
46 コイル状圧縮バネ
47 コイル状圧縮バネ
48 台形ネジ
50 くぼみ
51 積算回転計
54 回転ロック
61 駆動ユニット
62 駆動ユニットのハウジング
63 駆動ユニットのハウジング
64 ベアリングのハウジング
Claims (13)
- 旋盤にワークピース(4)をクランプ及び/又は保持するための自動調心式固定振れ止め(1)であって、前記固定振れ止め(1)のハウジング(2)に取り付けられかつ共通平面に調整可能に保持される3つの保持要素(5、6、7)を備え、このうち2つの外側の保持要素(5、7)は、前記ハウジング(2)内に、互いに鏡像配置の状態で支持される角度付きの旋回レバーとして構成され、真ん中の保持要素(6)は、駆動ユニット(61)と、前記駆動ユニット(61)と駆動可能な連結状態にある中片部(8)とによって、前記ハウジング(2)内で案内されて、前記ワークピース(4)の方向に軸方向に移動可能になっていて、前記中片部(8)には制御面(9)が設けられ、前記2つの外側の保持要素(5、7)が前記保持要素(5、7)の内側端(10)によって前記制御面(9)と相互に作用する、自動調心式固定振れ止め(1)において、
前記駆動ユニット(61)が電気モータ(21)によって駆動可能であること、
前記電気モータ(21)の回転運動が、前記駆動ユニット(61)によって前記中片部(8)の軸方向の少なくとも2つの異なる前進速度に変換され、その結果として前記ワークピース(4)に向けられる前進力(Fz)及びクランプ力(Fs)が生じること、
前記前進速度は、少なくとも第1の前進速度及び第2の前進速度を有し、前記第2の前進速度はゼロになる傾向を有すること、及び
前記中片部(8)と前記電気モータ(21)との間で、前記中片部(8)の対応する前進速度を設定するために、クラッチ(62)が使用され、これにより、前記駆動ユニット(61)を2つの異なるシフト位置に自動的に切り替えることが可能であること、
を特徴とする自動調心式固定振れ止め。 - 前記駆動ユニット(61)がシャフト(26)と、前記シャフト(26)の長手方向軸(3)での特定の領域内で前記シャフト(26)を取り囲んでいる中空シャフト(29)とを備えること、及び
前記シャフト(26)と前記中空シャフト(29)が、前記クラッチ(62)を介した連結状態にあることを特徴とする請求項1に記載の固定振れ止め。 - 前記クラッチ(62)がバネ付きピン(33)として構成されること、
前記ピン(33)が、前記シャフト(26)内に加工された穴(35)に配置され、この穴が前記固定振れ止め(1)の長手方向軸(3)に対して直角に位置合わせされること、
前記中空シャフト(29)の内側にくぼみ(32)が設けられ、前記3つの保持要素(5、6、7)の前進運動及び後退運動の間、前記ピン(33)が前記くぼみ内に嵌ること、及び
前記保持要素(5、6、7)が前記ワークピース(4)をクランプしている間、前記ピン(33)は前記くぼみ(32)から外れることを特徴とする請求項2に記載の固定振れ止め。 - 前記ピン(33)に対して直角に穴(34)が設けられ、この穴にコイル状圧縮バネ(36)が挿入されること、
前記コイル状圧縮バネ(36)はその自由端が、前記ピン(33)に加工されたノッチ(38)内に保持されること、及び
予荷重がかけられた状態で、前記コイル状圧縮バネ(36)が、前記中空シャフト(29)の前記くぼみ(32)に前記ピン(33)を押し付けることを特徴とする請求項3に記載の固定振れ止め。 - ネジ(30)が前記シャフト(26)の外側輪郭に加工されること、及び
前記シャフト(26)の前記ネジ(30)に対応する雌ネジ(31)が前記中空シャフト(29)の内側に設けられ、前記ネジは、前記クラッチ(62)の位置に従って相互に移動可能であること特徴とする請求項3に記載の固定振れ止め。 - 前記シャフト(26)が、前記固定振れ止め(1)の前記長手方向軸(3)と同一平面上を延びるピン(39)に接すること、及び
前記シャフト(26)と対向して位置する前記ピン(39)の自由端(40)が、前記ワークピース(4)の方向に先細りするピラミッド状接触面として具現化されることを特徴とする請求項2〜5のいずれか一項に記載の固定振れ止め。 - 前記ピン(39)の前記ピラミッド状平面(40)の外側に少なくとも1つのベルクランクレバー(41)が設けられ、前記レバー(41)は対で互いに対向して配置されること、
対応するベルクランクレバー(41)を収容するために前記中空シャフト(29)にくぼみ(50)が加工されること、
前記対応するベルクランクレバー(41)の自由端(43’)が、前記電気モータ(21)に割り当てられたベアリングハウジング(64)内に配置され、前記ベアリングハウジング(64)には伝達要素(15)が挿入されること、及び
前記自由端(43’)の反対側に位置する前記ベルクランクレバー(41)の自由端(44’)は前記中空シャフト(29)内に支持され、前記中空シャフト(29)が、前記中片部(8)と駆動可能な連結状態にあるねじ込みスピンドル(14)と連結状態で設置されることを特徴とする請求項6に記載の固定振れ止め。 - 前記ピン(39)と前記ねじ込みスピンドル(14)との間にコイル状圧縮バネ(46)が配置され、このねじ込みスピンドル(14)内に挿入され、これによって、前記シャフト(26)の方向に作用する戻り力によってピン(39)が作動することを特徴とする請求項7に記載の固定振れ止め。
- 前記中片部(8)が、軸方向に調整可能で回転により固定されるように、前記固定振れ止め(1)の前記ハウジング(2)内に保持されること、
前記固定振れ止め(1)の前記長手方向軸(3)と同一平面にある前記中片部(8)内にネジ穴(13)が加工され、前記ネジ穴(13)内にねじ込みスピンドル(14)が係合すること、
前記固定振れ止め(1)の前記長手方向軸(3)に対して直角に延びる保持ピン(16)によって前記ねじ込みスピンドル(14)が前記中空シャフト(29)に取り付けられること、及び
前記中空シャフト(29)内に加工されたくぼみ(50)内に挿入された少なくとも1つのベルクランクレバー(41)は、前記電気モータ(21)に割り当てられたベアリングハウジング(64)と前記中空シャフト(29)との間に配置され、前記ベルクランクレバー(41)の自由端(43、44)が、前記ベアリングハウジング(64)に割り当てられた伝達要素(15)と接触した状態にあることを特徴とする請求項2〜6のいずれか一項に記載の固定振れ止め。 - 前記シャフト(26)と、回転により固定される配置で前記電気モータ(21)及び前記シャフト(26)に連結されるフランジ(24)との間に、軸方向に移動可能な能動的連結が存在すること、及び
前記シャフト(26)が、前記フランジ(24)の内部輪郭に沿って案内されるように、前記固定振れ止め(1)の前記長手方向軸(3)と並列に保持されることを特徴とする請求項2〜9のいずれか一項に記載の固定振れ止め。 - 前記電気モータ(21)が、前記ハウジング(2)に隣接する前記固定振れ止め(1)の前記長手方向軸(3)と同軸又は同一平面に配置されること、及び
前記電気モータ(21)が、前記駆動ユニット(61)を、前記駆動ユニット(61)の円周方向に少なくとも部分的に取り囲むことを特徴とする請求項2〜10のいずれか一項に記載の固定振れ止め。 - 前記ベアリングハウジング(64)と前記ベルクランクレバー(41)の第1の自由端(43)との間に1つ以上の皿形バネ(45)が配置され、これにより、所定のクランプ力が、クランプ条件(Fz)を通じて前記3つの保持要素(5、6、7)に加えられることを特徴とする請求項7又は9に記載の固定振れ止め。
- 前記シャフト(26)と前記電気モータ(21)に角度測定装置(51)と電子制御ユニットが割り当てられること、前記3つの保持要素(5、6、7)と前記ワークピース(4)との間のストップに達する直前に前記電子制御ユニットによって前記電気モータ(21)の回転速度が減速されること、及び/又は前記電気モータ(21)の角度測定によって、前記中片部(8)の力制御(Fz)又は角度測定が可能で、これにより、前記クランプ運動(Fz)中に前記電気モータの回転数を設定可能であることを特徴とする請求項2〜12のいずれか一項に記載の固定振れ止め。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP10152923.8 | 2010-02-08 | ||
| EP10152923A EP2353777B1 (de) | 2010-02-08 | 2010-02-08 | Selbstzentrierende Lünette |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011161627A JP2011161627A (ja) | 2011-08-25 |
| JP5593249B2 true JP5593249B2 (ja) | 2014-09-17 |
Family
ID=42244188
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011023796A Active JP5593249B2 (ja) | 2010-02-08 | 2011-02-07 | 自動調心式固定振れ止め |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US8726772B2 (ja) |
| EP (1) | EP2353777B1 (ja) |
| JP (1) | JP5593249B2 (ja) |
| KR (1) | KR101475553B1 (ja) |
| CN (1) | CN102152136B (ja) |
| AT (1) | ATE537935T1 (ja) |
| PL (1) | PL2353777T3 (ja) |
| TW (1) | TWI510324B (ja) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102011051821A1 (de) * | 2011-07-13 | 2013-01-17 | Röhm Gmbh | Lünette mit Elektroantrieb |
| DE102011113765A1 (de) | 2011-09-19 | 2013-03-21 | Ludwig Ehrhardt Gmbh | Spannvorrichtung mit einem Elektromotor |
| KR101113455B1 (ko) * | 2011-11-25 | 2012-02-24 | 이창옥 | 선삭 가공용 방진구 |
| KR101505170B1 (ko) * | 2012-06-19 | 2015-03-24 | 서보산업 주식회사 | 시스템 서포트 |
| DE102012217001A1 (de) | 2012-09-21 | 2014-03-27 | ADVO-Carillon UG (haftungsbeschränkt) | Selbstzentrierende Lünette |
| US9114490B1 (en) | 2014-06-30 | 2015-08-25 | Arobotech Systems, Inc. | Adjustable fixture mechanism |
| US9174317B1 (en) * | 2014-08-14 | 2015-11-03 | Arobotech Systems, Inc. | Adjustable fixture mechanism |
| JP6457277B2 (ja) * | 2015-01-23 | 2019-01-23 | Dmg森精機株式会社 | 制振装置 |
| JP6396826B2 (ja) * | 2015-02-27 | 2018-09-26 | Dmg森精機株式会社 | 振れ止め装置 |
| EP3093103B1 (de) * | 2015-05-12 | 2017-07-12 | SMW-Autoblok Spannsysteme GmbH | Lünette |
| EP3093102B1 (de) * | 2015-05-12 | 2017-09-27 | SMW-Autoblok Spannsysteme GmbH | Lünette |
| DE102015115205A1 (de) * | 2015-09-10 | 2017-03-16 | Walter Maschinenbau Gmbh | Betätigungsvorrichtung für eine Lünette |
| EP3254801B1 (de) * | 2016-06-09 | 2019-04-03 | SMW-AUTOBLOK Spannsysteme GmbH | Lünette mit einer kraftmesseinrichtung |
| US9839985B1 (en) | 2017-03-10 | 2017-12-12 | Arobotech Systems, Inc. | Fixture assembly |
| EP3620248B1 (de) * | 2018-09-10 | 2022-06-22 | SMW-Autoblok Spannsysteme GmbH | Kopplungs-einrichtung |
| DE102019119610A1 (de) * | 2019-07-19 | 2020-08-27 | Schaeffler Technologies AG & Co. KG | Vorrichtung und Verfahren zum Schuhschleifen |
| CN111761376A (zh) * | 2020-04-21 | 2020-10-13 | 陈云飞 | 快速可换钳口自定心夹具及配套滚轮支撑模块 |
| CN113458432A (zh) * | 2021-07-28 | 2021-10-01 | 珠海镇东有限公司 | 阶梯轴车削跟刀架组合结构和车床 |
| CN115747411B (zh) * | 2022-11-07 | 2023-12-01 | 中冶东方工程技术有限公司 | 一种转炉氧枪对中装置 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE874548C (de) * | 1951-01-21 | 1953-04-23 | Ludwig Wienand | Selbstzentrierende Luenette |
| US3736114A (en) * | 1971-12-06 | 1973-05-29 | Toyoda Machine Works Ltd | Three point contact steady rest |
| GB2089708B (en) * | 1980-12-18 | 1984-02-22 | Index Werke Kg Hahn & Tessky | Steady for holding rod-like circular cross-section components |
| US4399639A (en) * | 1981-05-26 | 1983-08-23 | Lessway Richard J | True centering steady rest |
| US4546681A (en) * | 1982-11-15 | 1985-10-15 | Owsen Paul J | Multi-purpose steady rest |
| DE3611201A1 (de) | 1985-04-06 | 1986-10-09 | Maschinenfabrik Ravensburg AG, 7980 Ravensburg | Luenette |
| DE3544961A1 (de) * | 1985-12-19 | 1987-07-02 | Smw Spanneinrichtungen | Selbstzentrierende luenette |
| JPS63256324A (ja) * | 1987-04-13 | 1988-10-24 | Ntn Toyo Bearing Co Ltd | 長尺ワ−ク加工装置の自動ワ−クレスト |
| JPH0192008A (ja) * | 1987-09-30 | 1989-04-11 | Yamazaki Mazak Corp | 複合加工工作機械用ワーク振れ止め装置 |
| US5237780A (en) * | 1992-02-04 | 1993-08-24 | Arobotech Systems, Inc. | Steady rest with internal centerline adjustment |
| DE4209241A1 (de) * | 1992-03-21 | 1993-09-23 | Smw Spanneinrichtungen | Luenette |
| JPH07102503B2 (ja) * | 1992-08-26 | 1995-11-08 | 株式会社エスエムダブリュージャパン | 長尺ワーク円筒研削用自動芯出振れ止め装置及びその装置を用いた研削加工方法 |
| CN2229855Y (zh) * | 1995-06-30 | 1996-06-26 | 华中理工大学 | 液压自适应变径跟刀架 |
| JP2000006017A (ja) * | 1998-06-25 | 2000-01-11 | Toyoda Mach Works Ltd | 三点支持振れ止め装置 |
| DE20012710U1 (de) * | 2000-07-22 | 2000-11-23 | Röhm GmbH, 89567 Sontheim | Lünette |
| US6699113B2 (en) * | 2001-10-12 | 2004-03-02 | Arobotech Systems, Inc. | Steady rest with vertical adjustment |
| CN200967089Y (zh) * | 2006-10-17 | 2007-10-31 | 华中科技大学 | 一种自动定心中心架 |
| CN201324945Y (zh) * | 2008-11-21 | 2009-10-14 | 四川长征机床集团有限公司 | 自定心中心架 |
| EP2191932A1 (de) * | 2008-11-28 | 2010-06-02 | SMW-AUTOBLOK Spannsysteme GmbH | Lünette |
-
2010
- 2010-02-08 EP EP10152923A patent/EP2353777B1/de active Active
- 2010-02-08 AT AT10152923T patent/ATE537935T1/de active
- 2010-02-08 PL PL10152923T patent/PL2353777T3/pl unknown
-
2011
- 2011-01-03 TW TW100100037A patent/TWI510324B/zh active
- 2011-01-27 KR KR1020110008188A patent/KR101475553B1/ko active IP Right Grant
- 2011-01-30 CN CN201110037118.8A patent/CN102152136B/zh active Active
- 2011-02-04 US US12/931,570 patent/US8726772B2/en active Active
- 2011-02-07 JP JP2011023796A patent/JP5593249B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN102152136B (zh) | 2015-09-23 |
| EP2353777A1 (de) | 2011-08-10 |
| US8726772B2 (en) | 2014-05-20 |
| EP2353777B1 (de) | 2011-12-21 |
| JP2011161627A (ja) | 2011-08-25 |
| PL2353777T3 (pl) | 2012-07-31 |
| US20110209591A1 (en) | 2011-09-01 |
| KR20110092216A (ko) | 2011-08-17 |
| TW201127543A (en) | 2011-08-16 |
| CN102152136A (zh) | 2011-08-17 |
| TWI510324B (zh) | 2015-12-01 |
| ATE537935T1 (de) | 2012-01-15 |
| KR101475553B1 (ko) | 2014-12-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5593249B2 (ja) | 自動調心式固定振れ止め | |
| JP6145094B2 (ja) | 電気モータを有するクランプ装置 | |
| US10016881B2 (en) | Rotary tool | |
| JP5349615B2 (ja) | 工作機械 | |
| US9656393B2 (en) | Gripping or clamping device for gripping or clamping objects and method therefor | |
| US7431136B2 (en) | Hand power tool with a clutch | |
| JP6423647B2 (ja) | 旋盤またはフライス盤またはマシニングセンタに使用するチャックユニット | |
| JP2010014274A (ja) | 駆動装置 | |
| JP6128694B2 (ja) | ねじ作動型プレスユニット | |
| JP3984312B2 (ja) | 手工具 | |
| RU2602582C2 (ru) | Электрическое зажимное устройство | |
| JP6309022B2 (ja) | プッシュスタート機能を有する衝撃レンチ | |
| KR101926656B1 (ko) | 자동클러치 시스템을 포함한 전기구동 척킹시스템 | |
| GB2476562A (en) | Mechanism for selecting axial hammer drilling or rotation drilling | |
| JP2015112712A (ja) | ドリリング装置およびドリルチャック | |
| JP4117643B2 (ja) | クランプ装置 | |
| US20240100676A1 (en) | Spring element and coupling device | |
| JP2024100750A (ja) | 緊締または把持装置およびワークピースを把持または緊締する方法 | |
| JP5683439B2 (ja) | プレス機械のスティック解除装置 | |
| JP2013029189A (ja) | 安全増力電動アクチュエータ | |
| JP4828973B2 (ja) | 駆動装置 | |
| JP6071770B2 (ja) | 締付工具用回転動力伝達装置 | |
| JP4348680B2 (ja) | クランプ装置 | |
| KR20220113425A (ko) | 기계 공구들을 위한 섀프트 결합 | |
| JP3110658U6 (ja) | ノズル接触機構 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120313 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130604 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130903 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130906 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130926 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140204 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140418 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140722 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140804 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5593249 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |