図7は、従来の目標追跡装置の構成を示すブロック図である。この目標追跡装置は、パッシブセンサ1、パッシブセンサ処理部2、アクティブセンサ3、アクティブセンサ処理部4およびデータ融合部5を備えている。アクティブセンサ3およびアクティブセンサ処理部4は、外部装置である。
パッシブセンサ1は、目標から放射(再放射を含む)される電磁波または音波の角度、換言すれば、目標の角度を測定し、観測値(測角データ)としてパッシブセンサ処理部2に送る。パッシブセンサ処理部2は、パッシブセンサ1からの観測値に基づいて目標航跡として平滑値および予測値を算出し、データ融合部5に送る。また、パッシブセンサ処理部2は、算出した目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。
アクティブセンサ3は、電磁波または音波を放射し、これによって目標から反射される電磁波または音波を測定し、観測値としてアクティブセンサ処理部4に送る。アクティブセンサ処理部4は、パッシブセンサ処理部2と同様に、アクティブセンサ3からの観測値に基づいて目標航跡として平滑値および予測値を算出し、データ融合部5に送る。また、アクティブセンサ処理部4は、目標航跡に基づいて、アクティブセンサ3の姿勢等を制御する制御信号を生成し、アクティブセンサ3に送る。
データ融合部5は、パッシブセンサ処理部2からの目標航跡とアクティブセンサ処理部4からの目標航跡とが同一目標を示していると判定した場合に、これらの目標航跡のデータ融合を行い、データ融合航跡として外部に出力する。
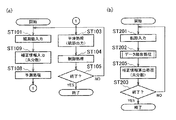
次に、上記のように構成される従来の目標追跡装置の動作を説明する。図8(a)は、従来の目標追跡装置で行われる目標追跡処理のうち、パッシブセンサ処理部2において行われる処理の流れを示すフローチャートであり、図8(b)は、データ融合部5において行われる処理の流れを示すフローチャートである。なお、アクティブセンサ処理部4において行われる処理は周知であるので、説明は省略する。
まず、パッシブセンサ処理部2において行われる処理を、図8(a)に示すフローチャートを参照しながら説明する。処理が開始されると、パッシブセンサ処理部2では、まず、観測値が入力される(ステップST101)。すなわち、パッシブセンサ1は、パッシブセンサ処理部2からの制御信号に基づいて目標の観測を行い、目標の観測値を算出してパッシブセンサ処理部2に送る。パッシブセンサ処理部2は、パッシブセンサ1から送られてくる観測値を入力する。
次いで、予測処理が実行される(ステップST102)。すなわち、パッシブセンサ処理部2は、前回観測時のステップST103において算出された目標の平滑値とその共分散行列に基づいて、目標の予測値とその共分散行列を算出する。
次いで、平滑処理(航跡出力)が実行される(ステップST103)。すなわち、パッシブセンサ処理部2は、パッシブセンサ1からの目標の観測値と、ステップST102において算出された目標の予測値とその共分散行列に基づいて、新たな目標の平滑値とその共分散行列を算出する。
次いで、制御処理が実行される(ステップST104)。すなわち、パッシブセンサ処理部2は、目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。
次いで、終了であるかどうかが調べられる(ステップST105)。ステップST105において、終了でないことが判断されると、ステップST101に戻り、上述した処理が繰り返される。一方、ステップST105において、終了であることが判断されると、パッシブセンサ処理部2における処理は終了する。
次に、データ融合部5において行われる処理を、図8(b)に示すフローチャートを参照しながら説明する。データ融合部5では、航跡が入力される(ステップST201)。すなわち、データ融合部5は、パッシブセンサ処理部2からの目標航跡を入力するとともに、アクティブセンサ処理部4からの目標航跡を入力する。
次いで、データ融合処理が実行される(ステップST202)。すなわち、データ融合部5は、パッシブセンサ処理部2からの目標航跡とアクティブセンサ処理部4からの目標航跡とのデータ融合を行い、データ融合航跡として外部に出力する。データ融合処理の詳細は後述する。
次いで、終了であるかどうかが調べられる(ステップST203)。ステップST203において、終了でないことが判断されると、ステップST201に戻り、上述した処理が繰り返される。一方、ステップST203において、終了であることが判断されると、データ融合部5における処理は終了する。
次に、パッシブセンサ処理部2で行われる処理内容について、詳細に説明する。目標の運動モデルを以下のように定義する。
ここで、xp kは、観測時刻tkにおける方位角ak、高低角ekおよびそれらの速度成分からなる状態ベクトル、Fk+1とGk+1は、観測時刻tkから観測時刻tk+1への遷移行列と駆動行列、wkは、観測時刻tkの平均0、共分散行列Qkのプロセス雑音ベクトル、σs kは、観測時刻tkにおけるプロセス雑音の標準偏差、rkは、観測時刻tkにおける目標までの距離である。また、ATは、ベクトルまたは行列Aの転置、Inは、n行n列の単位行列、Onは、n行n列の零行列を示す。
パッシブセンサ1の観測モデルを以下のように定義する。
ここで、ykは、観測時刻tkのパッシブセンサ1の観測ベクトル、Hkは、観測時刻tkのパッシブセンサ1の観測行列、vkは、観測時刻tkのパッシブセンサ1の平均0、共分散行列Rkの観測雑音ベクトル、σa kとσe kは、観測時刻tkにおける観測雑音の方位角と高低角の標準偏差である。
上述したステップST102においては、前回観測時の平滑処理の結果を用いて、以下の式で表される予測処理が実施される。なお、以下において、ハットxは「x(^)」と表記する。
ここで、x(^)p k|k−1は、観測時刻tkの予測ベクトル、Pk|k−1は、観測時刻tkの予測誤差共分散行列であり、x(^)p k−1|k−1は、観測時刻tk−1の平滑ベクトル、Pk−1|k−1は、観測時刻tk−1の平滑誤差共分散行列である。
なお、プロセス雑音共分散行列Qk−1の算出は、目標距離の真値rk−1が得られないため、予め設定された目標距離rpresetが用いられる。
上述したステップST103においては、パッシブセンサ1からの観測値と予測処理の結果を用いて、以下の式で表される平滑処理が実施される。なお、以下において、ティルデyは「y(〜)」と表記する。
ここで、y(〜)kは、観測時刻tkのパッシブセンサ1の残差ベクトル、Skは、観測時刻tkのパッシブセンサ1の残差共分散行列、Kkは、観測時刻tkのパッシブセンサ1のカルマンゲイン行列、x(^)p k|kは、観測時刻tkの平滑ベクトル、Pk|kは、観測時刻tkの平滑誤差共分散行列である。また、A−1は、行列Aの逆行列を示す。
次に、上記ステップST202で行われるデータ融合処理の詳細を、図9に示すフローチャートを参照しながら説明する。データ融合処理が開始されると、まず、同一目標判定処理が行われる(ステップST301)。すなわち、データ融合部5は、パッシブセンサ処理部2からの目標航跡とアクティブセンサ処理部4からの目標航跡とが同一の目標の航跡であるかどうかを判定する。
次いで、データ融合航跡算出処理が行われる(ステップST302)。すなわち、データ融合部5は、パッシブセンサ処理部2からの目標航跡とアクティブセンサ処理部4からの目標航跡とが同一の目標の航跡であることを判定した場合に、これら2つの目標航跡のデータ融合処理を行い、データ融合航跡として外部に出力する。その後、データ融合処理は終了する。
なお、データ融合処理(同一目標判定処理とデータ融合航跡算出処理)としては、非特許文献4等に開示されているデータ融合処理を用いることができる。また、同一目標判定処理としては、特許文献4に開示されている処理を用いることができる。
以上説明したように、パッシブセンサ1による目標追跡処理では、目標までの距離情報が得られないため、プロセス雑音共分散行列Qk−1に誤差が発生する。この結果、この値から間接的に算出され、航跡算出に用いられるフィルタゲイン(カルマンゲイン行列)も、最適値が算出されず航跡誤差が大きくなる。
また、上述したように、パッシブセンサ処理部2において算出する目標航跡の航跡誤差が大きいため、パッシブセンサ処理部2とアクティブセンサ処理部4からの目標航跡に基づいて、データ融合部5において算出されるデータ融合航跡の航跡誤差が大きくなる。
以下、本発明の実施の形態を、図面を参照しながら詳細に説明する。なお、以下においては、背景技術の欄で説明した構成部分と同一または相当する部分には、背景技術の欄で使用した符号と同じ符号を用いて説明する。
図1は、本発明の実施例1に係る目標追跡装置の構成を示すブロック図である。目標追跡装置は、パッシブセンサ1、パッシブセンサ処理部2a、アクティブセンサ3、アクティブセンサ処理部4、データ融合部5および補正情報算出部6aを備えている。アクティブセンサ3およびアクティブセンサ処理部4は、外部装置である。
パッシブセンサ1は、目標から放射(再放射を含む)される電磁波または音波の角度、換言すれば、目標の角度を測定し、観測値(測角データ)としてパッシブセンサ処理部2aに送る。パッシブセンサ処理部2aは、パッシブセンサ1からの観測値と補正情報算出部6aからの補正情報(目標距離)とに基づいて目標航跡として平滑値および予測値を算出し、データ融合部5に送る。また、パッシブセンサ処理部2aは、目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。
アクティブセンサ3は、電磁波または音波を放射し、これによって目標から反射される電磁波または音波を測定し、観測値としてアクティブセンサ処理部4に送る。アクティブセンサ処理部4は、パッシブセンサ処理部2aと同様に、アクティブセンサ3からの観測値に基づいて目標航跡として平滑値および予測値を算出し、データ融合部5に送る。また、アクティブセンサ処理部4は、目標航跡に基づいて、アクティブセンサ3の姿勢等を制御する制御信号を生成し、アクティブセンサ3に送る。
データ融合部5は、パッシブセンサ処理部2aからの目標航跡とアクティブセンサ処理部4からの目標航跡とが同一目標を示していると判定した場合に、これらの目標航跡のデータ融合を行い、データ融合航跡として補正情報算出部6aに送る。補正情報算出部6aは、データ融合部5から送られてくるデータ融合航跡に基づいて、目標までの距離を算出し、補正情報としてパッシブセンサ処理部2aに送る。
次に、上記のように構成される本発明の実施例1に係る目標追跡装置の動作を説明する。図2(a)は、実施例1に係る目標追跡装置で行われる目標追跡処理のうち、パッシブセンサ処理部2aにおいて行われる処理の流れを示すフローチャートであり、図2(b)は、データ融合部5において行われる処理の流れを示すフローチャートである。なお、アクティブセンサ処理部4において行われる処理は周知であるので、説明は省略する。また、以下においては、図8のフローチャートに示した従来の目標追跡装置で行われる処理と同じ処理を行うステップには、図8で使用した符号と同じ符号を付して説明する。
まず、パッシブセンサ処理部2aにおいて行われる処理を、図2(a)に示すフローチャートを参照しながら説明する。処理が開始されると、パッシブセンサ処理部2aでは、まず、観測値が入力される(ステップST101)。すなわち、パッシブセンサ1は、パッシブセンサ処理部2aからの制御信号に基づいて目標の観測を行い、目標の観測値を算出してパッシブセンサ処理部2aに送る。パッシブセンサ処理部2aは、パッシブセンサ1から送られてくる観測値を入力する。
次いで、補正情報入力処理(目標距離)が実行される(ステップST106)。すなわち、パッシブセンサ処理部2aは、補正情報算出部6aから補正情報(目標距離)を入力する。
次いで、共分散算出処理が実行される(ステップST107)。すなわち、パッシブセンサ処理部2aは、補正情報算出部6aからの補正情報(目標距離)に基づいて、プロセス雑音共分散行列Qk−1を算出する。
次いで、予測処理が実行される(ステップST108)。すなわち、パッシブセンサ処理部2aは、前回観測時のステップST103において算出された目標の平滑値およびその共分散行列とステップST107において算出されたプロセス雑音共分散行列Qk−1とに基づいて、目標の予測値とその共分散行列を算出する。
次いで、平滑処理(航跡出力)が実行される(ステップST103)。すなわち、パッシブセンサ処理部2aは、パッシブセンサ1からの目標の観測値とステップST108において算出された目標の予測値およびその共分散行列とに基づいて、目標の平滑値とその共分散行列を算出する。
次いで、制御処理が実行される(ステップST104)。すなわち、パッシブセンサ処理部2aは、目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。次いで、終了であるかどうかが調べられる(ステップST105)。ステップST105において、終了でないことが判断されると、ステップST101に戻り、上述した処理が繰り返される。一方、ステップST105において、終了であることが判断されると、パッシブセンサ処理部2aにおける処理は終了する。
次に、データ融合部5において行われる処理を、図2(b)に示すフローチャートを参照しながら説明する。データ融合部5では、まず、航跡が入力される(ステップST201)。すなわち、データ融合部5は、パッシブセンサ処理部2aからの目標航跡を入力するとともに、アクティブセンサ処理部4からの目標航跡を入力する。
次いで、データ融合処理が実行される(ステップST202)。すなわち、データ融合部5は、パッシブセンサ処理部2aからの目標航跡とアクティブセンサ処理部4からの目標航跡とのデータ融合を行い、データ融合航跡として補正情報算出部6aに送る。このデータ融合処理は、図9のフローチャートを参照して説明した従来の目標追跡装置で行われるデータ融合処理と同じである。
次いで、補正情報算出処理(目標距離)が実行される(ステップST204)。すなわち、補正情報算出部6aは、データ融合部5からのデータ融合航跡に基づいて目標までの距離を算出し、パッシブセンサ1からの観測値を入力して目標の航跡を算出するための補正情報(目標距離)としてパッシブセンサ処理部2aに送る。
次いで、終了であるかどうかが調べられる(ステップST203)。ステップST203において、終了でないことが判断されると、ステップST201に戻り、上述した処理が繰り返される。一方、ステップST203において、終了であることが判断されると、データ融合部5における処理は終了する。
次に、補正情報算出部6aとパッシブセンサ処理部2aで行われる処理内容について、詳細に説明する。目標の運動モデルを以下のように定義する。
ここで、xp kは、観測時刻tkにおける方位角ak、高低角ekとその速度成分からなる状態ベクトル、Fk+1とGk+1は、観測時刻tkから観測時刻tk+1への遷移行列と駆動行列、wkは、観測時刻tkの平均0、共分散行列Qkのプロセス雑音ベクトル、σs kは、観測時刻tkにおけるプロセス雑音の標準偏差、rkは、観測時刻tkにおける目標までの距離である。また、ATは、ベクトルまたは行列Aの転置、Inは、n行n列の単位行列、Onは、n行n列の零行列を示す。
パッシブセンサ1の観測モデルを以下のように定義する。
ここで、ykは、観測時刻tkのパッシブセンサ1の観測ベクトル、Hkは、観測時刻tkのパッシブセンサ1の観測行列、vkは、観測時刻tkのパッシブセンサ1の平均0、共分散行列Rkの観測雑音ベクトル、σa kとσe kは、観測時刻tkにおける観測雑音の方位角と高低角の標準偏差である。
上述したステップST106では、ステップST204において算出された目標距離r(^)
k−1を入力する。なお、目標距離r(^)
k−1は、データ融合航跡に基づいて、以下の式で算出する。
ここで、xk−1、yk−1、zk−1は、観測時刻tk−1の目標のデータ融合航跡の位置のx、y、z成分、x0、y0、z0は、パッシブセンサ1の位置のx、y、z成分である。
なお、外部装置(アクティブセンサとアクティブセンサ処理部)としては、レーダ装置等を使用できる。また、パッシブセンサ1と、略同位置に置かれたレーザ測距装置等の測距装置を用いて、目標距離を直接測定するように構成することができる。
上述したステップST107では、補正情報算出部6aからの補正情報(目標距離r(
^)
k−1)に基づいて、プロセス雑音共分散行列Q
k−1を算出する。
上述したステップST108では、前回観測時の平滑処理の結果とプロセス雑音共分散行列Q
k−1を用いて、以下の式で表される予測処理を実施する。
ここで、x(^)p k|k−1は、観測時刻tkの予測ベクトル、Pk|k−1は、観測時刻tkの予測誤差共分散行列であり、x(^)p k−1|k−1は、観測時刻tk−1の平滑ベクトル、Pk−1|k−1は、観測時刻tk−1の平滑誤差共分散行列である。
上述したステップST103では、パッシブセンサ1からの観測値と予測処理の結果を用いて、以下の式で表される平滑処理を実施する。
ここで、y(〜)kは、観測時刻tkのパッシブセンサ1の残差ベクトル、Skは、観測時刻tkのパッシブセンサ1の残差共分散行列、Kkは、観測時刻tkのパッシブセンサ1のカルマンゲイン行列、x(^)p k|kは、観測時刻tkの平滑ベクトル、Pk|kは、観測時刻tkの平滑誤差共分散行列である。また、A−1は、行列Aの逆行列を示す。
以上説明したように、本発明の実施例1に係る目標追跡装置によれば、補正情報算出部6aは、データ融合部5から出力されるデータ融合航跡に基づいて、補正情報(目標距離)をパッシブセンサ処理部2aに送り、パッシブセンサ処理部2aは、補正情報算出部6aからの補正情報(目標距離)に基づいて、プロセス雑音共分散行列Qk−1を算出し、この値から間接的に算出されるフィルタゲイン(カルマンゲイン行列)を、航跡算出に用いるので、パッシブセンサ処理部2aからの航跡誤差(ランダム成分)を小さくすることができる。その結果、データ融合部5において算出するデータ融合航跡の航跡誤差(ランダム成分)を小さくすることができる。
なお、上記では、パッシブセンサ処理部2aの目標の状態ベクトルとして、極座標系を用いた例を示したが、特許文献2に示されているように、カメラの画像上の目標の位置(水平、垂直座標とその速度)等を用いるように構成することができる。
また、上述した実施例1に係る目標追跡装置では、補正情報算出部6aは補正情報として目標距離を算出し、パッシブセンサ処理部2aは、この補正情報(目標距離)に基づいてプロセス雑音共分散行列を算出したが、補正情報算出部6aは補正情報としてプロセス雑音共分散行列を算出し、パッシブセンサ処理部2aは、この補正情報(プロセス雑音共分散行列)に基づいてフィルタゲインを算出するように構成することができる。
本発明の実施例2に係る目標追跡装置の構成は、図1に示した実施例1に係る目標追跡装置の補正情報算出部6aおよびパッシブセンサ処理部2aが、補正情報算出部6bおよびパッシブセンサ処理部2bにそれぞれ変更されて構成されている。以下では、実施例1に係る目標追跡装置と異なる部分を中心に説明する。
補正情報算出部6bは、データ融合部5から送られてくるデータ融合航跡とデータ融合航跡に対応しアクティブセンサ処理部4から出力されるプロセス雑音共分散行列を含む目標航跡に基づいて、目標のプロセス雑音共分散行列を算出し、補正情報としてパッシブセンサ処理部2bに送る。
パッシブセンサ処理部2bは、パッシブセンサ1からの観測値と補正情報算出部6bからの補正情報(プロセス雑音共分散行列)とに基づいて目標航跡として平滑値および予測値を算出し、データ融合部5に送る。
次に、上記のように構成される本発明の実施例2に係る目標追跡装置の動作を説明する。図3(a)は、実施例2に係る目標追跡装置で行われる目標追跡処理のうち、パッシブセンサ処理部2bにおいて行われる処理の流れを示すフローチャートであり、図3(b)は、データ融合部5において行われる処理の流れを示すフローチャートである。なお、アクティブセンサ処理部4において行われる処理は周知であるので、説明は省略する。また、以下においては、図2のフローチャートに示した実施例1に係る目標追跡装置で行われる処理と同じ処理を行うステップには、図2で使用した符号と同じ符号を付して説明する。
まず、パッシブセンサ処理部2bにおいて行われる処理を、図3(a)に示すフローチャートを参照しながら説明する。処理が開始されると、まず、観測値が入力される(ステップST101)。すなわち、パッシブセンサ1は、パッシブセンサ処理部2bからの制御信号に基づいて、目標の観測を行い、目標の観測値を算出してパッシブセンサ処理部2bに送る。
次いで、補正情報入力処理(共分散)が実行される(ステップST109)。すなわち、パッシブセンサ処理部2bは、補正情報算出部6bからの補正情報(プロセス雑音共分散行列)を入力する。
次いで、予測処理が実行される(ステップST108)。すなわち、パッシブセンサ処理部2bは、前回観測時のステップST103において算出された目標の平滑値およびその共分散行列と補正情報算出部6bからの補正情報(プロセス雑音共分散行列)とに基づいて、目標の予測値とその共分散行列を算出する。
次いで、平滑処理(航跡出力)が実行される(ステップST103)。すなわち、パッシブセンサ処理部2bは、パッシブセンサ1からの目標の観測値とステップST108において算出された目標の予測値およびその共分散行列とに基づいて、目標の平滑値およびその共分散行列を算出する。
次いで、制御処理が実行される(ステップST104)。すなわち、パッシブセンサ処理部2bは、目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。次いで、終了であるかどうかが調べられる(ステップST105)。ステップST105において、終了でないことが判断されると、ステップST101に戻り、上述した処理が繰り返される。一方、ステップST105において、終了であることが判断されると、パッシブセンサ処理部2bにおける処理は終了する。
次に、データ融合部5において行われる処理を、図3(b)に示すフローチャートを参照しながら説明する。データ融合部5では、まず、航跡が入力される(ステップST201)。すなわち、データ融合部5は、パッシブセンサ処理部2bからの目標航跡を入力するとともに、アクティブセンサ処理部4からの目標航跡を入力する。
次いで、データ融合処理が実行される(ステップST202)。すなわち、データ融合部5は、パッシブセンサ処理部2bからの目標航跡とアクティブセンサ処理部4からの目標航跡とのデータ融合を行い、データ融合航跡として補正情報算出部6bに送る。このデータ融合処理は、図9のフローチャートを参照して説明した従来の目標追跡装置で行われるデータ融合処理と同じである。
次いで、補正情報算出処理(共分散)が実行される(ステップST205)。すなわち、補正情報算出部6bは、データ融合部5からのデータ融合航跡とデータ融合航跡に対応しアクティブセンサ処理部4から出力されるプロセス雑音共分散行列を含む目標航跡に基づいて目標のプロセス雑音共分散行列を算出し、パッシブセンサ1からの観測値を入力して目標の航跡を算出するための補正情報(プロセス雑音共分散行列)としてパッシブセンサ処理部2bに送る。なお、外部装置(アクティブセンサとアクティブセンサ処理部)としては、目標のプロセス雑音共分散行列を推定できる特許文献3等に開示されたアダプティブカルマンフィルタや非特許文献3等に開示されたIMMフィルタを備えたレーダ装置等を使用できる。
次いで、終了であるかどうかが調べられる(ステップST203)。ステップST203において、終了でないことが判断されると、ステップST201に戻り、上述した処理が繰り返される。一方、ステップST203において、終了であることが判断されると、データ融合部5における処理は終了する。
次に、補正情報算出部6bとパッシブセンサ処理部2bで行われる処理内容について、詳細に説明する。目標の運動モデルとパッシブセンサ1の観測モデルは、実施例1と同じであるので説明を省略する。
上述したステップST109では、目標のプロセス雑音共分散行列を算出し、ステップST205において算出されたプロセス雑音共分散行列を入力する。なお、ステップST205では、アクティブセンサ処理部4から出力されるプロセス雑音共分散行列Q
a k−1とデータ融合部5から出力されるデータ融合航跡とに基づいて、補正情報として、パッシブセンサ1から見たプロセス雑音共分散行列Q
k−1を算出する。
ここで、アクティブセンサ処理部4から出力されるプロセス雑音共分散行列Q
a k−1が以下の(35)式で表されるとすると、変換行列T
k−1は、(36)式のようになる。なお、(x
k−1、y
k−1、z
k−1)、(a
k−1、e
k−1)は、座標変換によって、データ融合航跡をパッシブセンサ1から見た目標の位置
ベクトル(直交座標系と極座標系)に変換した値である。
なお、定義(設定)した運動モデルが実際の運動モデルと厳密に当てはまらない場合、モデル化の誤差成分を加味して、プロセス雑音共分散行列Qk−1を算出するように構成することができる。また、上記(xk−1、yk−1、zk−1)、(ak−1、ek−1)は、データ融合航跡から算出したが、アクティブセンサ処理部4から出力される航跡に基づいて算出するように構成することができる。
ステップST108およびステップST103の処理内容は、実施例1と同じであるので説明を省略する。
以上説明したように、本発明の実施例2に係る目標追跡装置によれば、補正情報算出部6bは、データ融合部5から出力されるデータ融合航跡に基づいて、補正情報(プロセス雑音共分散行列)をパッシブセンサ処理部2bに送り、パッシブセンサ処理部2bは、補正情報(プロセス雑音共分散行列)から間接的に算出されるフィルタゲイン(カルマンゲイン行列)を、航跡算出に用いるので、パッシブセンサ処理部2bからの航跡誤差(ランダム成分)を小さくすることができる。その結果、データ融合部5において算出するデータ融合航跡の航跡誤差(ランダム成分)を小さくすることができる。
本発明の実施例3に係る目標追跡装置の構成は、図1に示した実施例1に係る目標追跡装置の補正情報算出部6aおよびパッシブセンサ処理部2aが、補正情報算出部6cおよびパッシブセンサ処理部2cにそれぞれ変更されて構成されている。以下では、実施例1に係る目標追跡装置と異なる部分を中心に説明する。
補正情報算出部6cは、データ融合部5から送られてくるデータ融合航跡に基づいて、(17)式で定義(設定)した極座標系の等速運動モデルが直交座標系の等速運動モデルと厳密に当てはまらないことにより発生する目標の角加速度を制御入力ベクトルとみなして算出し、補正情報(制御入力ベクトル)としてパッシブセンサ処理部2cに送る。
パッシブセンサ処理部2cは、パッシブセンサ1からの観測値と補正情報算出部6cからの補正情報(制御入力ベクトル)とに基づいて目標航跡として平滑値および予測値を算出し、データ融合部5に送る。また、パッシブセンサ処理部2cは、目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。
次に、上記のように構成される本発明の実施例3に係る目標追跡装置の動作を説明する。図4(a)は、実施例3に係る目標追跡装置で行われる目標追跡処理のうち、パッシブセンサ処理部2cにおいて行われる処理の流れを示すフローチャートであり、図4(b)は、データ融合部5において行われる処理の流れを示すフローチャートである。なお、アクティブセンサ処理部4において行われる処理は周知であるので、説明は省略する。また、以下においては、図2のフローチャートに示した実施例1に係る目標追跡装置で行われる処理と同じ処理を行うステップには、図2で使用した符号と同じ符号を付して説明する。
まず、パッシブセンサ処理部2cにおいて行われる処理を、図4(a)に示すフローチャートを参照しながら説明する。処理が開始されると、まず、観測値が入力される(ステップST101)。すなわち、パッシブセンサ1は、パッシブセンサ処理部2cからの制御信号に基づいて、目標の観測を行い、目標の観測値を算出してパッシブセンサ処理部2cに送る。
次いで、補正情報入力処理(制御入力)が実行される(ステップST110)。すなわち、パッシブセンサ処理部2cは、補正情報算出部6cからの補正情報(制御入力ベクトル)を入力する。
次いで、予測処理が実行される(ステップST111)。すなわち、パッシブセンサ処理部2cは、前回観測時のステップST103において算出された目標の平滑値およびその共分散行列と補正情報算出部6cからの補正情報(制御入力ベクトル)とに基づいて、目標の予測値とその共分散行列を算出する。
次いで、平滑処理(航跡出力)が実行される(ステップST103)。すなわち、パッシブセンサ処理部2cは、パッシブセンサ1からの目標の観測値とステップST111において算出された目標の予測値およびその共分散行列とに基づいて、目標の平滑値およびその共分散行列を算出する。
次いで、制御処理が実行される(ステップST104)。すなわち、パッシブセンサ処理部2cは、目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。次いで、終了であるかどうかが調べられる(ステップST105)。ステップST105において、終了でないことが判断されると、ステップST101に戻り、上述した処理が繰り返される。一方、ステップST105において、終了であることが判断されると、目標追跡処理は終了する。
次に、データ融合部5において行われる処理を、図4(b)に示すフローチャートを参照しながら説明する。データ融合部5では、まず、航跡が入力される(ステップST201)。すなわち、データ融合部5は、パッシブセンサ処理部2cからの目標航跡を入力するとともに、アクティブセンサ処理部4からの目標航跡を入力する。
次いで、データ融合処理が実行される(ステップST202)。すなわち、データ融合部5は、パッシブセンサ処理部2cからの目標航跡とアクティブセンサ処理部4からの目標航跡とのデータ融合を行い、データ融合航跡として補正情報算出部6cに送る。このデータ融合処理は、図9のフローチャートを参照して説明した従来の目標追跡装置で行われるデータ融合処理と同じである。
次いで、補正情報算出処理(制御入力)が実行される(ステップST206)。すなわち、補正情報算出部6cは、データ融合部5からのデータ融合航跡に基づいて目標の制御入力ベクトルを算出し、パッシブセンサ1からの観測値を入力して目標の航跡を算出するための補正情報(制御入力ベクトル)としてパッシブセンサ処理部2cに送る。
次いで、終了であるかどうかが調べられる(ステップST203)。ステップST203において、終了でないことが判断されると、ステップST201に戻り、上述した処理が繰り返される。一方、ステップST203において、終了であることが判断されると、データ融合部5における処理は終了する。
次に、補正情報算出部6cとパッシブセンサ処理部2cで行われる処理内容について、詳細に説明する。目標の運動モデルを以下のように定義する。
ここで、xp kは、観測時刻tkにおける方位角ak、高低角ekとその速度成分からなる状態ベクトル、ukは、観測時刻tkにおける方位角ak、高低角ekの加速度成分からなる制御入力ベクトル、Fk+1とGk+1は、観測時刻tkから観測時刻tk+1への遷移行列と駆動行列、wkは、観測時刻tkの平均0、共分散行列Qkのプロセス雑音ベクトル、σs kは、観測時刻tkにおけるプロセス雑音の標準偏差、rkは、観測時刻tkにおける目標までの距離である。また、ATは、ベクトルまたは行列Aの転置、Inは、n行n列の単位行列、Onは、n行n列の零行列を示す。
パッシブセンサ1の観測モデルは、実施例1と同じであるので説明を省略する。
上述したステップST110では、ステップST206において算出された制御入力ベクトルを入力する。なお、ステップST110では、データ融合部5から出力される目標のデータ融合航跡に基づいて、補正情報として、制御入力ベクトル(角加速度)u
k−1を算出する。
なお、制御入力ベクトル(角加速度)u
k−1は、以下の式で算出する。
ここで、(xk−1、yk−1、zk−1)、(x(・)k−1、y(・)k−1、z(・)k−1)、(a(・)k−1、e(・)k−1)は、座標変換によって、データ融合航跡をパッシブセンサ1から見た目標の位置ベクトル、速度ベクトルおよび角速度ベクトル成分に変換した値である。
上述したステップST111では、前回観測時の平滑処理の結果と制御入力ベクトルu
k−1を用いて、以下の式で表される予測処理を実施する。
なお、プロセス雑音共分散行列Qk−1の算出は、目標距離の真値rk−1が得られないため、予め設定された目標距離rpresetが用いられる。
上述したステップST103の処理内容は、実施例1と同じであるので説明を省略する。
以上説明したように、本発明の実施例3に係る目標追跡装置によれば、補正情報算出部6cは、データ融合部5から出力されるデータ融合航跡に基づいて、補正情報(制御入力ベクトル)をパッシブセンサ処理部2cに送り、パッシブセンサ処理部2cは、補正情報算出部6cからの補正情報(制御入力ベクトル)に基づいて、目標の航跡を算出するので、パッシブセンサ処理部2cからの航跡誤差(バイアス成分)を小さくすることができる。その結果、データ融合部5において算出するデータ融合航跡の航跡誤差(バイアス成分)を小さくすることができる。
本発明の実施例4に係る目標追跡装置の構成は、図1に示した実施例1に係る目標追跡装置の補正情報算出部6aおよびパッシブセンサ処理部2aが、補正情報算出部6dおよびパッシブセンサ処理部2dにそれぞれ変更されて構成されている。以下では、実施例1に係る目標追跡装置と異なる部分を中心に説明する。
補正情報算出部6dは、データ融合部5から送られてくるデータ融合航跡とデータ融合航跡に対応しアクティブセンサ処理部4から出力されるプロセス雑音共分散行列を含む目標航跡に基づいて、目標のプロセス雑音共分散行列と制御入力ベクトルを算出し、補正情報としてパッシブセンサ処理部2dに送る。
パッシブセンサ処理部2dは、パッシブセンサ1からの観測値と補正情報算出部6dからの補正情報(プロセス雑音共分散行列と制御入力ベクトル)に基づいて平滑値および予測値を算出し、データ融合部5に送る。また、パッシブセンサ処理部2dは、目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。
次に、上記のように構成される本発明の実施例4に係る目標追跡装置の動作を説明する。図5(a)は、実施例4に係る目標追跡装置で行われる目標追跡処理のうち、パッシブセンサ処理部2dにおいて行われる処理の流れを示すフローチャートであり、図5(b)は、データ融合部5において行われる処理の流れを示すフローチャートである。なお、アクティブセンサ処理部4において行われる処理は周知であるので、説明は省略する。また、以下においては、図2〜図4のフローチャートに示した実施例1〜実施例3に係る目標追跡装置で行われる処理と同じ処理を行うステップには、図2〜図4のフローチャートで使用した符号と同じ符号を付して説明する。
まず、パッシブセンサ処理部2dにおいて行われる処理を、図5(a)に示すフローチャートを参照しながら説明する。処理が開始されると、まず、観測値が入力される(ステップST101)。すなわち、パッシブセンサ1は、パッシブセンサ処理部2dからの制御信号に基づいて、目標の観測を行い、目標の観測値を算出してパッシブセンサ処理部2dに送る。
次いで、補正情報入力処理(共分散)が実行される(ステップST109)。すなわち、パッシブセンサ処理部2dは、補正情報算出部6dからの補正情報(プロセス雑音共分散行列)を入力する。
次いで、補正情報算出処理(制御入力)が実行される(ステップST110)。すなわち、パッシブセンサ処理部2dは、補正情報算出部6dからの補正情報(制御入力ベクトル)を入力する。
次いで、予測処理が実行される(ステップST112)。すなわち、パッシブセンサ処理部2dは、前回観測時のステップST103において算出された目標の平滑値およびその共分散行列と補正情報算出部6dからの補正情報(プロセス雑音共分散行列と制御入力ベクトル)とに基づいて、目標の予測値とその共分散行列を算出する。
次いで、平滑処理(航跡出力)が実行される(ステップST103)。すなわち、パッシブセンサ処理部2dは、パッシブセンサ1からの目標の観測値とステップST112において算出された目標の予測値およびその共分散行列とに基づいて、目標の平滑値とその共分散行列を算出する。
次いで、制御処理が実行される(ステップST104)。すなわち、パッシブセンサ処理部2dは、目標航跡に基づいて、パッシブセンサ1の姿勢等を制御する制御信号を生成し、パッシブセンサ1に送る。次いで、終了であるかどうかが調べられる(ステップST105)。ステップST105において、終了でないことが判断されると、ステップST101に戻り、上述した処理が繰り返される。一方、ステップST105において、終了であることが判断されると、目標追跡処理は終了する。
次に、データ融合部5において行われる処理を、図5(b)に示すフローチャートを参照しながら説明する。データ融合部5では、まず、航跡が入力される(ステップST201)。すなわち、データ融合部5は、パッシブセンサ処理部2dからの目標航跡を入力するとともに、アクティブセンサ処理部4からの目標航跡を入力する。
次いで、データ融合処理が実行される(ステップST202)。すなわち、データ融合部5は、パッシブセンサ処理部2dからの目標航跡とアクティブセンサ処理部4からの目標航跡とのデータ融合を行い、データ融合航跡として補正情報算出部6dに送る。このデータ融合処理は、図9のフローチャートを参照して説明した従来の目標追跡装置で行われるデータ融合処理と同じである。
次いで、補正情報算出処理(共分散)が実行される(ステップST205)。すなわち、補正情報算出部6dは、データ融合部5からのデータ融合航跡とデータ融合航跡に対応しアクティブセンサ処理部4から出力されるプロセス雑音共分散行列を含む目標航跡に基づいて目標のプロセス雑音共分散行列を算出し、パッシブセンサ1からの観測値を入力して目標の航跡を算出するための補正情報(プロセス雑音共分散行列)としてパッシブセンサ処理部2dに送る。
次いで、補正情報算出処理(制御入力)が実行される(ステップST206)。すなわち、補正情報算出部6dは、データ融合部5からのデータ融合航跡に基づいて目標の制御入力ベクトルを算出し、パッシブセンサ1からの観測値を入力して目標の航跡を算出するための補正情報(制御入力ベクトル)としてパッシブセンサ処理部2dに送る。
次いで、終了であるかどうかが調べられる(ステップST203)。ステップST203において、終了でないことが判断されると、ステップST201に戻り、上述した処理が繰り返される。一方、ステップST203において、終了であることが判断されると、データ融合部5における処理は終了する。
次に、補正情報算出部6dとパッシブセンサ処理部2dで行われる処理内容について、詳細に説明する。目標の運動モデルは、実施例3と同じであるので説明を省略する。また、パッシブセンサ1の観測モデルは、実施例1と同じであるので説明を省略する。また、上述したステップST109の処理内容は、実施例2と同じであり、ステップST110の処理内容は、実施例3と同じであるので説明を省略する。
上述したステップST112では、前回観測時の平滑処理の結果、(34)式のプロセス雑音共分散行列Q
k−1および(43)式の制御入力ベクトルu
k−1を用いて、以下の式で表される予測処理を実施する。
上述したステップST103の処理内容は、実施例1と同じであるので説明を省略する。
以上説明したように、本発明の実施例4に係る目標追跡装置によれば、補正情報算出部6dは、データ融合部5から出力されるデータ融合航跡とデータ融合航跡に対応しアクティブセンサ処理部4から出力されるプロセス雑音共分散行列を含む目標航跡に基づいて、補正情報(プロセス雑音共分散行列と制御入力ベクトル)をパッシブセンサ処理部2dに送り、パッシブセンサ処理部2dは、補正情報算出部6dからの補正情報(プロセス雑音共分散行列と制御入力ベクトル)に基づいて、目標の航跡を算出するので、パッシブセンサ処理部2dからの航跡誤差(ランダム成分とバイアス成分)を小さくすることができる。その結果、データ融合部5において算出するデータ融合航跡の航跡誤差(ランダム成分とバイアス成分)を小さくすることができる。
なお、上述した実施例4では、プロセス雑音共分散行列と制御入力ベクトルとを組み合わせる例を示したが、目標距離と制御入力ベクトルを組み合わせるように構成することができる。
また、上述した実施例1〜実施例4に係る目標追跡装置は、図6に示すように変形することができる。図6(a)は、パッシブセンサ処理部2a〜2dとデータ融合部5との間を通信部7aおよび通信部7cを介して接続するとともに、アクティブセンサ処理部4とデータ融合部5との間を通信部7bおよび通信部7cを介して接続し、さらに、補正情報算出部6a〜6dとパッシブセンサ処理部2a〜2dとの間を通信部7aおよび通信部7dを介して接続したので、パッシブセンサ1、パッシブセンサ処理部2a〜2d、アクティブセンサ3およびアクティブセンサ処理部4を含むブロックと、データ融合部5および補正情報算出部6a〜6dを含むブロックとを別体に構成できる。
図6(b)は、図6(a)に示した構成において、さらに、パッシブセンサ1とパッシブセンサ処理部2a〜2dとの間を通信部8eおよび通信部8fを介して接続したものである。この構成により、パッシブセンサ1を含むブロックと、パッシブセンサ処理部2a〜2d、アクティブセンサ3およびアクティブセンサ処理部4を含むブロックと、データ融合部5および補正情報算出部6a〜6dを含むブロックとを別体に構成できる。