JP5531699B2 - 振動デバイス - Google Patents
振動デバイス Download PDFInfo
- Publication number
- JP5531699B2 JP5531699B2 JP2010065016A JP2010065016A JP5531699B2 JP 5531699 B2 JP5531699 B2 JP 5531699B2 JP 2010065016 A JP2010065016 A JP 2010065016A JP 2010065016 A JP2010065016 A JP 2010065016A JP 5531699 B2 JP5531699 B2 JP 5531699B2
- Authority
- JP
- Japan
- Prior art keywords
- vibrating
- vibrating body
- base
- fixing
- electrode
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000005484 gravity Effects 0.000 claims description 24
- 238000000926 separation method Methods 0.000 claims description 7
- 239000000463 material Substances 0.000 description 76
- 239000000758 substrate Substances 0.000 description 43
- 229910052751 metal Inorganic materials 0.000 description 15
- 239000002184 metal Substances 0.000 description 15
- 238000000034 method Methods 0.000 description 11
- 239000000853 adhesive Substances 0.000 description 7
- 230000001070 adhesive effect Effects 0.000 description 7
- 239000000470 constituent Substances 0.000 description 7
- 239000013078 crystal Substances 0.000 description 6
- 230000000694 effects Effects 0.000 description 6
- 239000010408 film Substances 0.000 description 6
- 230000015572 biosynthetic process Effects 0.000 description 5
- 238000006073 displacement reaction Methods 0.000 description 5
- 238000000576 coating method Methods 0.000 description 4
- 239000011521 glass Substances 0.000 description 4
- 238000005452 bending Methods 0.000 description 3
- 239000010453 quartz Substances 0.000 description 3
- 229910052710 silicon Inorganic materials 0.000 description 3
- 239000010703 silicon Substances 0.000 description 3
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 3
- 239000010409 thin film Substances 0.000 description 3
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 2
- 239000004642 Polyimide Substances 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- 238000005219 brazing Methods 0.000 description 2
- 239000000919 ceramic Substances 0.000 description 2
- 229910010293 ceramic material Inorganic materials 0.000 description 2
- 238000005229 chemical vapour deposition Methods 0.000 description 2
- 239000011248 coating agent Substances 0.000 description 2
- 230000005684 electric field Effects 0.000 description 2
- 238000005530 etching Methods 0.000 description 2
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 2
- 239000010931 gold Substances 0.000 description 2
- 229910052737 gold Inorganic materials 0.000 description 2
- 238000010030 laminating Methods 0.000 description 2
- 239000007769 metal material Substances 0.000 description 2
- 238000007747 plating Methods 0.000 description 2
- 229920001721 polyimide Polymers 0.000 description 2
- 238000004544 sputter deposition Methods 0.000 description 2
- WSMQKESQZFQMFW-UHFFFAOYSA-N 5-methyl-pyrazole-3-carboxylic acid Chemical compound CC1=CC(C(O)=O)=NN1 WSMQKESQZFQMFW-UHFFFAOYSA-N 0.000 description 1
- 241000251468 Actinopterygii Species 0.000 description 1
- 229910001316 Ag alloy Inorganic materials 0.000 description 1
- 229910000838 Al alloy Inorganic materials 0.000 description 1
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 1
- 229910000599 Cr alloy Inorganic materials 0.000 description 1
- 239000004593 Epoxy Substances 0.000 description 1
- WQZGKKKJIJFFOK-GASJEMHNSA-N Glucose Natural products OC[C@H]1OC(O)[C@H](O)[C@@H](O)[C@@H]1O WQZGKKKJIJFFOK-GASJEMHNSA-N 0.000 description 1
- MKYBYDHXWVHEJW-UHFFFAOYSA-N N-[1-oxo-1-(2,4,6,7-tetrahydrotriazolo[4,5-c]pyridin-5-yl)propan-2-yl]-2-[[3-(trifluoromethoxy)phenyl]methylamino]pyrimidine-5-carboxamide Chemical compound O=C(C(C)NC(=O)C=1C=NC(=NC=1)NCC1=CC(=CC=C1)OC(F)(F)F)N1CC2=C(CC1)NN=N2 MKYBYDHXWVHEJW-UHFFFAOYSA-N 0.000 description 1
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 229910002113 barium titanate Inorganic materials 0.000 description 1
- JRPBQTZRNDNNOP-UHFFFAOYSA-N barium titanate Chemical compound [Ba+2].[Ba+2].[O-][Ti]([O-])([O-])[O-] JRPBQTZRNDNNOP-UHFFFAOYSA-N 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 230000036772 blood pressure Effects 0.000 description 1
- 229910052804 chromium Inorganic materials 0.000 description 1
- 239000011651 chromium Substances 0.000 description 1
- 239000000788 chromium alloy Substances 0.000 description 1
- RZVXOCDCIIFGGH-UHFFFAOYSA-N chromium gold Chemical compound [Cr].[Au] RZVXOCDCIIFGGH-UHFFFAOYSA-N 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 238000010304 firing Methods 0.000 description 1
- 239000008103 glucose Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- GQYHUHYESMUTHG-UHFFFAOYSA-N lithium niobate Chemical compound [Li+].[O-][Nb](=O)=O GQYHUHYESMUTHG-UHFFFAOYSA-N 0.000 description 1
- 235000013372 meat Nutrition 0.000 description 1
- 230000008018 melting Effects 0.000 description 1
- 238000002844 melting Methods 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 150000004767 nitrides Chemical class 0.000 description 1
- 229910052574 oxide ceramic Inorganic materials 0.000 description 1
- 239000011224 oxide ceramic Substances 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 238000000206 photolithography Methods 0.000 description 1
- 229920001296 polysiloxane Polymers 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 239000004332 silver Substances 0.000 description 1
- 229910000679 solder Inorganic materials 0.000 description 1
- RIUWBIIVUYSTCN-UHFFFAOYSA-N trilithium borate Chemical compound [Li+].[Li+].[Li+].[O-]B([O-])[O-] RIUWBIIVUYSTCN-UHFFFAOYSA-N 0.000 description 1
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 1
- 229910052721 tungsten Inorganic materials 0.000 description 1
- 239000010937 tungsten Substances 0.000 description 1
- 238000001771 vacuum deposition Methods 0.000 description 1
- 238000007740 vapor deposition Methods 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images













Description
例えば、特許文献1に記載の振動体は、基部と、この基部から互いに平行となるように延出する3つの振動腕と、各振動腕上に下部電極層、圧電層および上部電極層がこの順で成膜されて構成された圧電体素子とを有する。このような振動体において、各圧電体素子は、下部電極層と上部電極層との間に電圧が印加されることにより、圧電層を伸縮させ、各振動腕を基部の厚さ方向に屈曲振動させる。
しかし、特許文献1に記載の振動体では、振動体の基部の幅方向での両端部が実装基板に対して固定されているため、振動腕を基部の厚さ方向に屈曲振動させたとき、この屈曲振動に伴って基部がその厚さ方向成分を含む方向に振動する漏れ振動がバンプを介してパッケージに伝達されやすく、振動漏れが大きくなると言う問題があった。
[適用例1]
本発明の振動デバイスは、基部と、該基部から第1の方向に延出するとともに、該第1の方向に直交する第2の方向に並んで設けられ、前記第1の方向および前記第2の方向にそれぞれ直交する第3の方向に屈曲振動する複数の振動腕とを備える振動体と、
前記振動体を収納するパッケージと、
前記基部に設けられ、固定材を介して前記振動体を前記パッケージに部分的に固定する固着部と、を有し、
前記振動体は、3つの前記振動腕を備えており、
前記3つの振動腕は、隣り合う2つの前記振動腕が互いに反対方向に屈曲振動するように構成され、
前記固着部は、前記第3の方向から見たときに、前記振動体の重心を通り前記第1の方向に延びる線分上もしくはその近傍に位置し、かつ、前記固着部の前記第2の方向での幅は、前記3つの振動腕のうちの外側の2つの振動腕の間の前記第2の方向での離間距離よりも小さいことを特徴とする。
また、第3の方向から見たときに振動体の重心を通り第1の方向に延びる線分上またはその近傍に固着部が設けられているので、振動体の第2の方向における一部のみをパッケージに固定しても、振動体をパッケージに安定的に固定(支持)することができる。
また、3つの振動腕の隣り合う2つの振動腕が互いに反対方向に屈曲振動するように構成されていることにより、隣り合う2つの振動腕により生じる漏れ振動を互いに相殺することができる。その結果、振動漏れを防止することができる。
また、固着部の第2の方向での幅が3つの振動腕のうちの外側の2つの振動腕の間の第2の方向での離間距離よりも小さいことにより、振動体の基部に対して固着部の占める第2の方向の長さの割合を小さくすることができる。そのため、漏れ振動がパッケージに伝達されるのを防止または抑制することができる。
本発明の振動デバイスでは、前記固着部は、前記第3の方向から見たときに、前記振動体の重心近傍に設けられていることが好ましい。
これにより、振動体の第1の方向での一部(一点)のみをパッケージに固定する場合において、第3の方向から見たときに固着部が振動体の重心から離れている場合に比べて、振動体をパッケージに安定的に固定することができる。
本発明の振動デバイスでは、前記振動体は、その重心が前記基部内に位置するように構成されていることが好ましい。
これにより、振動体の基部とパッケージとを固定材を介して固定することができる。そのため、パッケージに対する振動体の設置・固定が簡単なものとなる。
本発明の振動デバイスでは、前記基部は、その前記第3の方向での厚さが前記各振動腕の前記第3の方向での厚さよりも大きい部分を有することが好ましい。
これにより、基部の第1の方向および第2の方向での寸法を抑えつつ、基部内に振動体の重心を位置させることができる。
本発明の振動デバイスでは、前記固着部は、前記第3の方向から見たときに、その中心が前記振動体の重心と一致するように設けられていることが好ましい。
これにより、振動体の一部(一点)をパッケージに固定する場合において、振動体をパッケージに安定的に固定することができる。
本発明の振動デバイスでは、前記基部は、前記第3の方向を厚さ方向とする板状をなし、前記基部の一方の面には、前記固着部が設けられ、前記基部の他方の面上には、前記各振動腕を振動させるための電圧が印加される1対の電極のうちの少なくとも一方の電極が設けられていることが好ましい。
これにより、1つの固着部で振動体をパッケージに簡単に固定することができる。
本発明の振動デバイスでは、前記基部の他方の面上に設けられた前記電極は、前記第3の方向から見たときに、前記線分付近に位置するように設けられていることが好ましい。
これにより、振動体が漏れ振動や外部からの衝撃により変位しても、基部の固着部と反対側の面上に設けられた電極の変位を抑えることができる。そのため、例えば、基部の固着部と反対側の面上に設けられた電極にボンディングワイヤーを介して通電を行う場合、そのボンディングワイヤーの損傷を防止することができる。
本発明の振動デバイスでは、前記1対の電極は、それぞれ、前記基部の前記他方の面上に設けられていることが好ましい。
これにより、基部の固着部とは反対側から1対の電極に通電を行うことができる。そのため、固定材は導電性を有する必要がないので、固定材の材料の選択の幅が広がる。その結果、所望の機械的特性を有する固定材を簡単に実現することができる。
本発明の振動デバイスでは、前記1対の電極は、前記第3の方向から見たときに、前記線分上に沿って並ぶように設けられていることが好ましい。
これにより、振動体が漏れ振動や外部からの衝撃により変位しても、1対の電極の変位をそれぞれ抑えることができる。
本発明の振動デバイスでは、前記1対の電極のうち、一方の電極が前記基部の前記一方の面上に設けられ、他方の電極が前記基部の前記他方の面上に設けられ、
前記固定材は、導電性を有し、前記固定材を介して前記他方の電極に通電されることが好ましい。
これにより、1つの固着部で振動体をパッケージに固定しつつ、1対の電極に通電を行うことができる。
本発明の振動デバイスでは、前記基部は、前記第3の方向を厚さ方向とする板状をなし、前記基部の一方の面には、前記固着部が設けられているとともに、前記各振動腕を振動させるための電圧が印加される1対の電極が前記第3の方向から見たときに前記線分付近に位置するように設けられ、
前記固定材は、導電性を有し、前記固定材を介して前記1対の電極に通電されることが好ましい。
これにより、ボンディングワイヤーを用いることなく、1対の電極に通電を行うことができる。そのため、振動デバイスの構成が簡単となる。
本発明の振動デバイスでは、前記固着部は、前記第3の方向から見たときに、前記線分を介して対称となるように1対設けられていることが好ましい。
これにより、振動体をパッケージに安定的に固定(支持)することができる。
[適用例13]
本発明の振動デバイスでは、前記固着部は、前記第3の方向から見たときに、前記線分上に沿って並ぶように1対設けられていることが好ましい。
これにより、2つの固着部が振動体に固着している場合においても、振動体の基部に対して固着部の占める第2の方向の長さの割合を小さくすることができる。そのため、漏れ振動がパッケージに伝達されるのを防止または抑制することができる。
本発明の振動デバイスでは、前記振動体は、前記振動腕上に設けられた第1の電極層と、該第1の電極層上に設けられた圧電体層と、該圧電体層上に設けられた第2の電極層とを備え、前記第1の電極層と前記第2の電極層との間に通電することにより、前記圧電体層を伸縮させて、前記振動腕を振動させる圧電体素子を有することが好ましい。
これにより、比較的簡単に、各振動腕を第3の方向に屈曲振動させることができる。また、各振動腕が圧電性を有していなくてもよいので、各振動腕の材料の選択の幅が広がる。そのため、所望の振動特性を有する振動体を比較的簡単に実現することができる。
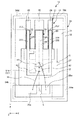
<第1実施形態>
図1は、本発明の第1実施形態に係る振動デバイスを示す断面図、図2は、図1に示す振動デバイスを示す上面図、図3は、図1に示す振動デバイスに備えられた振動体を示す下面図、図4は、図2中のA−A線断面図、図5は、図2に示す振動体の動作を説明するための斜視図である。なお、各図では、説明の便宜上、互いに直交する3つの軸として、X軸、Y軸およびZ軸を図示している。また、以下では、Y軸に平行な方向(第1の方向)をY軸方向、X軸に平行な方向(第2の方向)を「X軸方向」、Z軸に平行な方向(第3の方向)をZ軸方向と言う。また、以下の説明では、説明の便宜上、図1中の上側を「上」、下側を「下」、右側を「右」、左側を「左」と言う。
図1に示す振動デバイス1は、振動体2と、この振動体2を収納するパッケージ3と、振動体2をパッケージ3に固定する固定材5とを有する。
(振動体)
まず、振動体2について説明する。
振動体2は、図2に示すような3脚音叉型の振動体である。この振動体2は、振動基板21と、この振動基板21上に設けられた圧電体素子22、23、24および接続電極41、42とを有している。
振動基板21の構成材料としては、所望の振動特性を発揮することができるものであれば、特に限定されず、各種圧電体材料および各種非圧電体材料を用いることができる。
例えば、かかる圧電体材料としては、水晶、タンタル酸リチウム、ニオブ酸リチウム、ホウ酸リチウム、チタン酸バリウム等が挙げられる。特に、振動基板21を構成する圧電体材料としては水晶が好ましい。水晶で振動基板21を構成すると、振動基板21の振動特性を優れたものとすることができる。また、エッチングにより高い寸法精度で振動基板21を形成することができる。
また、かかる非圧電体材料としては、例えば、シリコン、石英等が挙げられる。特に、振動基板21を構成する非圧電体材料としてはシリコンが好ましい。シリコンで振動基板21を構成すると、振動基板21の振動特性を優れたものとすることができる。また、エッチングにより高い寸法精度で振動基板21を形成することができる。
また、薄肉部271は、後述する各振動腕28、29、30と等しい厚さとなるように形成されている。したがって、厚肉部272は、そのZ軸方向での厚さが各振動腕28、29、30のZ軸方向での厚さよりも大きい部分である。
基部27が前述したような厚肉部272を有することにより、基部27のY軸方向およびX軸方向での寸法を抑えつつ、基部27の質量を大きくすることができる。その結果、基部27のY軸方向およびX軸方向での寸法を抑えつつ、基部27内に振動体2の重心を位置させることができる。
振動腕28、29は、基部27(薄肉部271)のX軸方向での両端部に接続され、振動腕30は、基部27(薄肉部271)のX軸方向での中央部に接続されている。
3つの振動腕28、29、30は、互いに平行となるように基部27からそれぞれ延出して設けられている。より具体的には、3つの振動腕28、29、30は、基部27からそれぞれY軸方向に延出するとともに、X軸方向に並んで設けられている。
また、振動腕28、29は、互いに同じ幅となるように形成され、振動腕30は、振動腕28、29の幅の2倍の幅となるように形成されている。これにより、振動腕28、29をZ軸方向に屈曲振動させるとともに、振動腕30を振動腕28、29と反対方向に(逆相で)Z軸方向に屈曲振動させたとき、振動漏れを少なくすることができる。
このような圧電体素子22は、図4に示すように、振動腕28上に、第1の電極層221、圧電体層(圧電薄膜)222、第2の電極層223がこの順で積層されて構成されている。
同様に、圧電体素子23は、振動腕29上に、第1の電極層231、圧電体層(圧電薄膜)232、第2の電極層233がこの順で積層されて構成されている。また、圧電体素子24は、振動腕30上に、第1の電極層241、圧電体層(圧電薄膜)242、第2の電極層243がこの順で積層されて構成されている。
このような第1の電極層221、231、241、第2の電極層223、233、243、接続電極41、42および配線43等は、それぞれ、クロム金積層膜、アルミニウム、アルミニウム合金、銀、銀合金、クロム、クロム合金等の導電性に優れた金属材料により形成することができる。
なお、第1の電極層221、231、241は、同一の成膜工程で形成することができ、また、第2の電極層223、233、243は、同一の成膜工程で形成することができる。
また、これらの圧電体層の形成方法としては、スパッタリング法、真空蒸着法等の物理成膜法、CVD等の化学蒸着法、インクジェット法等の各種塗布法等が挙げられる。
なお、圧電体層222、232、242は、同一の成膜工程で形成することができる。
また、各振動腕28、29、30が屈曲振動すると、接続電極41、42間には、圧電体材料の圧電効果により、ある一定の周波数で電圧が発生する。これらの性質を利用して、振動体2は、共鳴周波数で振動する電気信号を発生させることができる。
次に、振動体2を収容・固定するパッケージ3について説明する。
パッケージ3は、図1に示すように、板状のベース基板31と、枠状の枠部材32と、板状の蓋部材33とを有している。ベース基板31、枠部材32および蓋部材33は、下側から上側へこの順で積層されている。ベース基板31と枠部材32は、セラミック材料等で形成されており、互いに一体に焼成されることで接合されている。そして、枠部材32と蓋部材33は、低融点ガラス、接着剤、ろう材、あるいはシーム溶接等により接合されている。そして、パッケージ3は、ベース基板31、枠部材32および蓋部材33で画成された内部空間Sに、振動体2を収納している。なお、パッケージ3内には、振動体2の他、振動体2を駆動する電子部品等を収納することもできる。
また、枠部材32および蓋部材33の構成材料としては、例えば、ベース基板31と同様の構成材料、Al、Cuのような各種金属材料、各種ガラス材料等を用いることができる。特に、蓋部材33の構成材料として、ガラス材料等の光透過性を有するものを用いた場合、振動体2に予め金属被覆部(図示せず)を形成しておくと、振動体2をパッケージ3内に収容した後であっても、蓋部材33を介して前記金属被覆部にレーザーを照射し、前記金属被覆部を除去して振動体2の質量を減少させることにより(質量削減方式により)、振動体2の周波数調整を行うことができる。
この電極35a上には、固定材5を介して、前述した振動体2が固定されている。この固定材5は、導電性を有している。これにより、固定材5を介して、振動体2がベース基板31に固定されるとともに、接続電極42と電極35aが固定材5を介して電気的に接続される。本実施形態では、前述した厚肉部272が振動基板21の厚さ方向に突出する側の面を下側(ベース基板31側)となるように、振動体2がパッケージ3に対して固定されている。なお、固定材5については、後に詳述する。
また、ベース基板31の下面には、4つの外部端子34a、34b、34c、34dが設けられている。
なお、パッケージ3内部に電子部品を収納した場合、ベース基板31の下面には、必要に応じて、電子部品の特性検査や、電子部品内の各種情報(例えば、振動デバイスの温度補償情報)の書き換え(調整)を行うための書込端子が形成されていてもよい。
固定材5は、振動体2をパッケージ3に対して部分的に固定する機能を有する。
また、本実施形態では、固定材5は、導電性を有する。例えば、固定材5は、導電性粒子を含有するエポキシ系、ポリイミド系、シリコーン系等の導電性接着剤、および金等のバンプで構成されている。このような固定材5は、未硬化(未固化)の導電性接着剤を電極35a上に塗布し、さらに、この導電性接着剤上に振動体2を載置した後、その導電性接着剤を硬化または固化させることにより形成される。これにより、振動体2(基部27)が電極35a(ベース基板31)に確実に固定される。
なお、固定材5は、半田やろう材等で構成されていてもよい。この場合にも、固定材5を介して接続電極42と電極35aとを電気的に接続することができる。
本実施形態では、固定材5および固着部51は、Z軸方向から見たときに、それぞれ、円形をなしている。なお、固定材5および固着部51のZ軸方向から見たときの形状は、これに限定されず、楕円形、3角形、4角形、5角形等の多角形等であってもよい。
これにより、振動体2の基部27に対して固着部51の占めるX軸方向の長さの割合を小さくすることができる。そのため、振動体2の各振動腕28、29、30がZ軸方向に屈曲振動したときに、それに伴って基部27に漏れ振動が生じても、その漏れ振動がパッケージ3に伝達されるのを防止または抑制することができる。その結果、本発明の振動デバイス1は、振動漏れを防止または抑制することができる。
特に、固着部51は、Z軸方向から見たときに、振動体2の重心G近傍に設けられている。これにより、振動体2のY軸方向での一部(一点)のみをパッケージ3に固定する場合において、Z軸方向から見たときに固着部51が振動体2の重心Gから離れている場合に比べて、振動体2をパッケージ3に安定的に固定することができる。
本実施形態では、振動体2は、その重心Gが基部27内に位置している。これにより、振動体2の基部27とパッケージ3とを固定材5を介して固定することができる。そのため、パッケージ3に対する振動体2の設置・固定が簡単なものとなる。
また、前述した1対の接続電極41、42は、一方の接続電極41が板状の基部27の一方の面(上面)上に設けられ、他方の接続電極42が基部27の他方の面(下面)上に設けられている。そのため、振動体2の下側からの通電箇所は接続電極42の1箇所のみとなる。したがって、導電性を有する固定材5を介して接続電極42に通電することにより、1つの固着部51で振動体2をパッケージ3に簡単に固定することができる。
また、本実施形態では、固着部51のX軸方向での幅Wは、3つの振動腕28、29、30のうちの内側(中央)の振動腕30のX軸方向の幅とほぼ等しくなっている。これにより、振動腕28、29の屈曲振動に伴って基部27に生じる漏れ振動が固着部51(固定材5)に伝わるのをより確実に防止することができる。
また、固定材5は、前述した電極35a(ベース基板31)にも固着した部分を有しているが、かかる部分の面積は、パッケージ3に対する振動体2の固定に必要な固定材5の機械的強度を確保する観点から、固着部51と同等もしくはそれ以上であるのが好ましい。
また、固着部51が前述した線分L上に設けられているので、振動体2のX軸方向における一部(一点)のみをパッケージ3に固定しても、振動体2をパッケージ3に安定的に固定(支持)することができる。
次に、本発明の振動デバイスの第2実施形態について説明する。
図6は、本発明の第2実施形態に係る振動デバイスを示す断面図、図7は、図6に示す振動デバイスを示す上面図である。
以下、第2実施形態の振動デバイスについて、前述した実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
第2実施形態の振動デバイスは、接続電極およびこれに通電するための構成が異なる以外は、第1実施形態とほぼ同様である。なお、図6、7では、前述した実施形態と同様の構成には、同一符号を付してある。
振動体2Aは、図6、7に示すように、振動基板21の基部27の一方の面(上面)上に接続電極41、42がそれぞれ設けられている。
そして、接続電極41と電極35aが金属ワイヤー37を介して電気的に接続されているとともに、接続電極42と電極35bが金属ワイヤー38を介して電気的に接続されている。
前述したように、基部27の固着部51とは反対側の面上に1対の接続電極41、42がそれぞれ設けられているので、基部27の固着部51Aとは反対側から1対の接続電極41、42に通電を行うことができる。そのため、固定材5Aは導電性を有する必要がないので、固定材5Aの材料の選択の幅が広がる。その結果、所望の機械的特性を有する固定材5Aを簡単に実現することができる。また、1つの固定材5A(固着部51A)で振動体2をパッケージ3に簡単に固定することができる。
以上説明したような第2実施形態によっても、前述した第1の実施形態と同様の効果を奏することができる。
次に、本発明の振動デバイスの第3実施形態について説明する。
図8は、本発明の第3実施形態に係る振動デバイスを示す断面図、図9は、図8に示す振動デバイスを示す上面図である。
以下、第3実施形態の振動デバイスについて、前述した実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
第3実施形態の振動デバイスは、パッケージに対する振動体の向きが異なる以外は、第1実施形態とほぼ同様である。なお、図8、9では、前述した実施形態と同様の構成には、同一符号を付してある。
本実施形態では、振動体2Bが、前述した第1実施形態とは表裏反転した状態で、パッケージ3B内に収納されている。すなわち、本実施形態では、前述した厚肉部272が振動基板21の厚さ方向に突出する側の面を上側(ベース基板31とは反対側)となるように、振動体2Bがパッケージ3Bに対して固定されている。
そして、接続電極41が固定材5Bを介して電極35aに電気的に接続され、接続電極42が金属ワイヤー37を介して電極35bに電気的に接続されている。
特に、本実施形態では、前述したように振動体2Bが第1実施形態とは表裏反転した状態でパッケージ3B内に収納されているので、第1実施形態に比し、振動体2Bの重心Gと固着部51との間の距離が短くなっている。そのため、振動体2Bをパッケージ3Bに対してより安定的に固定することができる。
以上説明したような第3実施形態によっても、前述した第1の実施形態と同様の効果を奏することができる。
次に、本発明の振動デバイスの第4実施形態について説明する。
図10は、本発明の第4実施形態に係る振動デバイスを示す断面図、図11は、図10に示す振動デバイスを示す上面図である。
以下、第4実施形態の振動デバイスについて、前述した実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
振動体2Cは、図10、11に示すように、振動基板21の基部27の一方の面(下面)上に接続電極41、42がそれぞれ設けられている。なお、振動体2Cの構成は、前述した第2実施形態の振動体2Aとほぼ同様である。
そして、接続電極41と電極35bが一方の固定材5Cを介して電気的に接続されているとともに、接続電極42と電極35aが他方の固定材5Cを介して電気的に接続されている。
このように、本実施形態では、基部27のベース基板31側の面上に設けられた1対の接続電極41、42に2つの固定材5Cを介して通電を行うことができる。そのため、ボンディングワイヤー(金属ワイヤー)を用いることなく、1対の接続電極41、42に通電を行うことができる。そのため、振動デバイス1Cの構成が簡単となる。
また、各固着部51CのX軸方向での幅は、3つの振動腕28、29、30のうちの外側の2つの振動腕28、29の間のX軸方向での離間距離Dよりも小さい。これにより、振動体2Cの基部27に対して固着部51Cの占めるX軸方向の長さの割合を小さくすることができる。
また、パッケージ3Cに対する振動体2Cの固定に必要な固定材5Cの機械的強度、および、振動体2Cに対して固定材5Cを固着可能な面積を考慮すると、振動体2Cの基部27に対して2つの固着部51C全体(2つの固着部51Cおよびこれらの間の領域を合わせたもの)の占めるY軸方向の長さの割合は、基部27の形状や大きさ等にもよるが、1/20以上1/2以下であるのが好ましく、1/20以上1/3以下であるのがより好ましく、1/20以上1/4以下であるのがさらに好ましい。
以上説明したような第4実施形態によっても、前述した第1の実施形態と同様の効果を奏することができる。
次に、本発明の振動デバイスの第5実施形態について説明する。
図12は、本発明の第5実施形態に係る振動デバイスを示す断面図、図13は、図12に示す振動デバイスを示す上面図、図14は、図12に示す振動デバイスに備えられた振動体を示す下面図である。
以下、第5実施形態の振動デバイスについて、前述した実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
振動体2Dは、図13、14に示すように、振動基板21の基部27の一方の面(下面)上に接続電極41、42がそれぞれ設けられている。
そして、接続電極41と電極35bが一方の固定材5Dを介して電気的に接続されているとともに、接続電極42と電極35aが他方の固定材5Dを介して電気的に接続されている。
2つの固定材5Dは、Z軸方向から見たときに、それぞれ振動体2Dの重心G付近に位置し、振動体2Dをパッケージ3Dに対して固定している。この各固定材5Dは、振動体2Dに部分的に固着する固着部51Dを備える。
また、2つの固着部51D全体(2つの固着部51Dおよびこれらの間の領域を合わせたもの。以下同じ。)のX軸方向での幅Wは、3つの振動腕28、29、30のうちの外側の2つの振動腕28、29の間のX軸方向での離間距離Dよりも小さい。これにより、振動体2Dの基部27に対して固着部51Dの占めるX軸方向の長さの割合を小さくすることができる。そのため、基部27に生じた漏れ振動がパッケージ3Dに伝達されるのを防止または抑制することができる。
また、基部27に生じた漏れ振動がパッケージ3Dに伝達されるのを防止または抑制する観点から、振動体2Dの基部27に対して2つの固着部51D全体の占めるX軸方向の長さの割合は、1/20以上1/3以下であるのが好ましく、1/20以上1/4以下であるのがより好ましい。
以上説明したような第5実施形態によっても、前述した第1の実施形態と同様の効果を奏することができる。
本発明の振動デバイスを備える電子機器としては、特に限定されないが、例えば、パーソナルコンピュータ(モバイル型パーソナルコンピュータ)、携帯電話機、ディジタルスチルカメラ、インクジェット式吐出装置(例えばインクジェットプリンタ)、ラップトップ型パーソナルコンピュータ、テレビ、ビデオカメラ、ビデオテープレコーダ、カーナビゲーション装置、ページャ、電子手帳(通信機能付も含む)、電子辞書、電卓、電子ゲーム機器、ワードプロセッサ、ワークステーション、テレビ電話、防犯用テレビモニタ、電子双眼鏡、POS端末、医療機器(例えば電子体温計、血圧計、血糖計、心電図計測装置、超音波診断装置、電子内視鏡)、魚群探知機、各種測定機器、計器類(例えば、車両、航空機、船舶の計器類)、フライトシミュレータ等が挙げられる。
また、前述した実施形態では、圧電素子を用いて各振動腕を屈曲振動させる場合を説明したが、振動腕自体を圧電体材料で構成し、かかる振動腕上に1対以上の励振電極を設けた構成であっても、本発明を適用することができる。
また、本発明の振動デバイスは、水晶発振器(SPXO)、電圧制御水晶発振器(VCXO)、温度補償水晶発振器(TCXO)、恒温槽付水晶発振器(OCXO)等の圧電発振器の他、ジャイロセンサー等に適用される。
Claims (14)
- 基部と、該基部から第1の方向に延出するとともに、該第1の方向に直交する第2の方向に並んで設けられ、前記第1の方向および前記第2の方向にそれぞれ直交する第3の方向に屈曲振動する複数の振動腕とを備える振動体と、
前記振動体を収納するパッケージと、
前記基部に設けられ、固定材を介して前記振動体を前記パッケージに部分的に固定する固着部と、を有し、
前記振動体は、3つの前記振動腕を備えており、
前記3つの振動腕は、隣り合う2つの前記振動腕が互いに反対方向に屈曲振動するように構成され、
前記固着部は、前記第3の方向から見たときに、前記振動体の重心を通り前記第1の方向に延びる線分上もしくはその近傍に位置し、かつ、前記固着部の前記第2の方向での幅は、前記3つの振動腕のうちの外側の2つの振動腕の間の前記第2の方向での離間距離よりも小さいことを特徴とする振動デバイス。 - 前記固着部は、前記第3の方向から見たときに、前記振動体の重心近傍に設けられている請求項1に記載の振動デバイス。
- 前記振動体は、その重心が前記基部内に位置するように構成されている請求項2に記載の振動デバイス。
- 前記基部は、その前記第3の方向での厚さが前記各振動腕の前記第3の方向での厚さよりも大きい部分を有する請求項3に記載の振動デバイス。
- 前記固着部は、前記第3の方向から見たときに、その中心が前記振動体の重心と一致するように設けられている請求項2ないし4のいずれかに記載の振動デバイス。
- 前記基部は、前記第3の方向を厚さ方向とする板状をなし、前記基部の一方の面には、前記固着部が設けられ、前記基部の他方の面上には、前記各振動腕を振動させるための電圧が印加される1対の電極のうちの少なくとも一方の電極が設けられている請求項5に記載の振動デバイス。
- 前記基部の他方の面上に設けられた前記電極は、前記第3の方向から見たときに、前記線分付近に位置するように設けられている請求項6に記載の振動デバイス。
- 前記1対の電極は、それぞれ、前記基部の前記他方の面上に設けられている請求項6または7に記載の振動デバイス。
- 前記1対の電極は、前記第3の方向から見たときに、前記線分上に沿って並ぶように設けられている請求項8に記載の振動デバイス。
- 前記1対の電極のうち、一方の電極が前記基部の前記一方の面上に設けられ、他方の電極が前記基部の前記他方の面上に設けられ、
前記固定材は、導電性を有し、前記固定材を介して前記他方の電極に通電される請求項6に記載の振動デバイス。 - 前記基部は、前記第3の方向を厚さ方向とする板状をなし、前記基部の一方の面には、前記固着部が設けられているとともに、前記各振動腕を振動させるための電圧が印加される1対の電極が前記第3の方向から見たときに前記線分付近に位置するように設けられ、
前記固定材は、導電性を有し、前記固定材を介して前記1対の電極に通電される請求項2ないし4のいずれかに記載の振動デバイス。 - 前記固着部は、前記第3の方向から見たときに、前記線分を介して対称となるように1対設けられている請求項11に記載の振動デバイス。
- 前記固着部は、前記第3の方向から見たときに、前記線分上に沿って並ぶように1対設けられている請求項11に記載の振動デバイス。
- 前記振動体は、前記振動腕上に設けられた第1の電極層と、該第1の電極層上に設けられた圧電体層と、該圧電体層上に設けられた第2の電極層とを備え、前記第1の電極層と前記第2の電極層との間に通電することにより、前記圧電体層を伸縮させて、前記振動腕を振動させる圧電体素子を有する請求項1ないし13のいずれかに記載の振動デバイス。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010065016A JP5531699B2 (ja) | 2010-03-19 | 2010-03-19 | 振動デバイス |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010065016A JP5531699B2 (ja) | 2010-03-19 | 2010-03-19 | 振動デバイス |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011199661A JP2011199661A (ja) | 2011-10-06 |
| JP2011199661A5 JP2011199661A5 (ja) | 2013-05-02 |
| JP5531699B2 true JP5531699B2 (ja) | 2014-06-25 |
Family
ID=44877288
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010065016A Expired - Fee Related JP5531699B2 (ja) | 2010-03-19 | 2010-03-19 | 振動デバイス |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5531699B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8581669B2 (en) | 2011-02-02 | 2013-11-12 | Seiko Epson Corporation | Vibrator element, vibrator, oscillator, and electronic apparatus |
| JP5685962B2 (ja) | 2011-02-02 | 2015-03-18 | セイコーエプソン株式会社 | 振動片、振動子、発振器及び電子機器 |
| JP2014165573A (ja) * | 2013-02-22 | 2014-09-08 | Seiko Epson Corp | 振動片、振動子、電子デバイス、電子機器、および移動体 |
| JP6482169B2 (ja) | 2013-07-19 | 2019-03-13 | セイコーエプソン株式会社 | 振動片、振動子、発振器、電子機器及び移動体 |
| CN109580030B (zh) * | 2019-01-10 | 2020-08-11 | 哈尔滨华凡传感技术有限公司 | 一种具有多枚箭形振臂的高精度谐振式石英温度传感器 |
| WO2020202961A1 (ja) * | 2019-03-29 | 2020-10-08 | 株式会社村田製作所 | 音叉型圧電振動子及びその製造方法 |
| CN114704589B (zh) * | 2022-04-21 | 2023-03-24 | 山东大学 | 一种局域共振型声子晶体减振装置及设备 |
-
2010
- 2010-03-19 JP JP2010065016A patent/JP5531699B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011199661A (ja) | 2011-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5482250B2 (ja) | 振動体および振動デバイス | |
| JP7205570B2 (ja) | 振動デバイス、電子機器および移動体 | |
| JP5531699B2 (ja) | 振動デバイス | |
| JP2011193399A (ja) | 振動片、振動子および圧電デバイス | |
| JP6435596B2 (ja) | 振動素子、振動デバイス、電子機器、および移動体 | |
| JP2012105044A (ja) | 振動デバイスおよび電子機器 | |
| JP2019128211A (ja) | 振動素子、振動素子の製造方法、物理量センサー、慣性計測装置、電子機器および移動体 | |
| JP2013192013A (ja) | 振動素子、振動デバイスおよび電子機器 | |
| JP6318550B2 (ja) | 振動片、角速度センサー、電子機器および移動体 | |
| JP6277606B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP5982896B2 (ja) | センサー素子、センサーデバイスおよび電子機器 | |
| JP6083110B2 (ja) | 振動素子、振動デバイス、ジャイロセンサーおよび電子機器 | |
| JP2011223371A (ja) | 振動片、振動デバイスおよび電子機器 | |
| JP6507565B2 (ja) | 電子デバイス、電子機器および移動体 | |
| JP2011199454A (ja) | 振動体および振動デバイス | |
| JP2011199453A (ja) | 振動体および振動デバイス | |
| JP2012060355A (ja) | 振動片、振動子、振動デバイスおよび電子機器 | |
| JP6766644B2 (ja) | センサー素子、物理量センサー、電子機器および移動体 | |
| JP5703576B2 (ja) | 振動デバイス | |
| JP2019178904A (ja) | 振動素子、振動素子の製造方法、物理量センサー、慣性計測装置、電子機器および移動体 | |
| JP6492536B2 (ja) | センサー素子、物理量センサー、電子機器および移動体 | |
| JP5884849B2 (ja) | 振動片、振動子、発振器、ジャイロセンサーおよび電子機器 | |
| JP2011199578A (ja) | 振動片および振動デバイス | |
| JP2016085185A (ja) | センサー素子、物理量センサー、電子機器および移動体 | |
| JP6492537B2 (ja) | センサー素子、物理量センサー、電子機器および移動体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130318 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130318 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131210 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140207 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140325 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140407 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5531699 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |