JP5501577B2 - X線ct装置 - Google Patents
X線ct装置 Download PDFInfo
- Publication number
- JP5501577B2 JP5501577B2 JP2008165830A JP2008165830A JP5501577B2 JP 5501577 B2 JP5501577 B2 JP 5501577B2 JP 2008165830 A JP2008165830 A JP 2008165830A JP 2008165830 A JP2008165830 A JP 2008165830A JP 5501577 B2 JP5501577 B2 JP 5501577B2
- Authority
- JP
- Japan
- Prior art keywords
- ray
- electron beam
- focal point
- detector
- focus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000006096 absorbing agent Substances 0.000 claims description 55
- 238000010894 electron beam technology Methods 0.000 claims description 55
- 238000001514 detection method Methods 0.000 claims description 32
- 230000005684 electric field Effects 0.000 claims description 31
- 230000008859 change Effects 0.000 claims description 13
- 230000005672 electromagnetic field Effects 0.000 claims description 13
- 238000005259 measurement Methods 0.000 claims description 10
- 238000013459 approach Methods 0.000 claims description 4
- 238000005192 partition Methods 0.000 claims description 3
- 238000000034 method Methods 0.000 description 60
- 230000008569 process Effects 0.000 description 52
- 238000002591 computed tomography Methods 0.000 description 37
- 238000013480 data collection Methods 0.000 description 34
- 238000010586 diagram Methods 0.000 description 9
- 238000003384 imaging method Methods 0.000 description 8
- 238000012545 processing Methods 0.000 description 8
- 238000012937 correction Methods 0.000 description 5
- 238000007796 conventional method Methods 0.000 description 3
- 230000005484 gravity Effects 0.000 description 3
- 230000005855 radiation Effects 0.000 description 3
- 230000007423 decrease Effects 0.000 description 2
- 238000005338 heat storage Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000002123 temporal effect Effects 0.000 description 2
- 238000009825 accumulation Methods 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images













Description
filter)をさらに備える上記第12の観点のX線CT装置を提供する。
(第1の実施形態)
(第2の実施形態)
(第3の実施形態)
(第4の実施形態)
(第5の実施形態)
2 入力装置
3 中央処理装置
4 制御インタフェース
5 データ収集バッファ
6 モニタ
7 回転部
8 撮影テーブル
9 走査ガントリ
10 X線コントローラ
11 X線発生部
12 アパーチャ部
13 X線検出部
14 データ収集部
15 回転コントローラ
20 被検体
100 X線CT装置
101 X線管制御部
102 焦点制御部
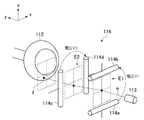
111 X線管
112 回転陽極
113,115,116 電子銃
114 偏向用電極部
114a〜114d 電極
121a〜121d アパーチャ用コリメータ
122 X線吸収体支持部材
123 X線吸収体
131 X線検出器
132 検出素子
133 コリメータフィルタ
134 チャネル方向のフィルタ用コリメータ
135 スライス方向のフィルタ用コリメータ
Xb X線ビーム
e,e1,e2 電子線
f 焦点
E1,E2 電場
Claims (13)
- 電子線の電極との衝突により形成される焦点からX線ビームを射出するX線管と、前記X線管と対向して配置されており、前記X線ビームを検出するX線検出器とを備えたX線CT装置において、
電磁場を用いて前記電子線を複数の方向に偏向して、前記焦点を任意の方向へ移動させることが可能な電子線偏向手段と、
前記X線検出器に対する前記焦点の位置が目標位置に近づくよう、前記電子線偏向手段を制御する制御手段とを備え、
前記制御手段は、前記X線ビームが通過する位置であって、前記X線検出器に対して一定である位置に配置されるX線吸収体の前記X線検出器から得られる投影データに基づいて、前記電子線偏向手段を制御するX線CT装置。
- 前記制御手段は、前記投影データによって特定される前記焦点の実測位置と前記目標位置との差分が小さくなるよう、前記電子線偏向手段を制御する請求項1に記載のX線CT装置。
- 前記制御手段は、スキャン中に、前記電子線偏向手段を制御する請求項2に記載のX線CT装置。
- 前記制御手段は、焦点移動予測データに基づいて、予測される前記焦点の移動が打ち消されるよう、前記電子線偏向手段を制御する請求項3に記載のX線CT装置。
- 前記制御手段は、前記電磁場の変化と前記焦点の位置の変化との関係を表す情報を参照して、形成すべき電磁場を決定する請求項1から請求項4のいずれか1項に記載のX線CT装置。
- 前記X線吸収体は、前記X線ビームにより前記X線検出器のチャネル方向の端部近傍に投影されるような位置に配置される請求項1から請求項5のいずれか一項に記載のX線CT装置。
- 前記X線吸収体は、前記X線ビームを整形するアパーチャの近傍に設けられる請求項1から請求項6のいずれか一項に記載のX線CT装置。
- 前記X線吸収体は、球形である請求項1から請求項7のいずれか1項に記載のX線CT装置。
- 前記制御手段は、前記X線検出器に対する前記焦点の位置が、前記X線ビームの中心と前記X線検出器の中心とが一致するような目標位置に近づくよう、前記電子線偏向手段を制御する請求項1から請求項8のいずれか一項に記載のX線CT装置。
- 前記電子線偏向手段は、前記電子線を前記電子線に垂直な第1の方向に偏向するための電場または磁場を形成する第1の電磁場形成手段と、前記電子線を前記第1の方向とは異なる第2の方向に偏向するための電場または磁場を形成する第2の電磁場形成手段とを有し、
前記制御手段は、前記第1および第2の電磁場形成手段を制御して前記電場または磁場の大きさを制御する請求項1から請求項9のいずれか一項に記載のX線CT装置。
- 前記X線管は、複数の電子銃を有する請求項1から請求項10のいずれか1項に記載のX線CT装置。
- 前記X線検出器は、複数の検出素子をチャネル方向に配設して成る検出器列をスライス方向に4以上有する多列検出器である請求項1から請求項11のいずれか1項に記載のX線CT装置。
- チャネル方向に延びる複数のコリメータと、スライス方向に延びる複数のコリメータとが、前記X線検出器上で前記検出素子を区分するように格子状に組み合わされて成るコリメータフィルタをさらに備える請求項12に記載のX線CT装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008165830A JP5501577B2 (ja) | 2008-06-25 | 2008-06-25 | X線ct装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008165830A JP5501577B2 (ja) | 2008-06-25 | 2008-06-25 | X線ct装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010005015A JP2010005015A (ja) | 2010-01-14 |
| JP5501577B2 true JP5501577B2 (ja) | 2014-05-21 |
Family
ID=41586190
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008165830A Expired - Fee Related JP5501577B2 (ja) | 2008-06-25 | 2008-06-25 | X線ct装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5501577B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102770076B (zh) * | 2010-02-26 | 2016-08-17 | 株式会社日立制作所 | X射线摄像装置 |
| JP5808734B2 (ja) * | 2010-02-26 | 2015-11-10 | 株式会社日立メディコ | X線撮像装置 |
| WO2013068888A1 (en) * | 2011-11-11 | 2013-05-16 | Koninklijke Philips Electronics N.V. | Enlarged angular gating window c-arm image acquisition |
| US8891727B2 (en) | 2012-02-24 | 2014-11-18 | General Electric Company | Radiation imaging apparatus, radiation detecting apparatus and radiation focal-point movement detecting method |
| JP5977167B2 (ja) * | 2012-12-26 | 2016-08-24 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 放射線断層撮影装置 |
| US10383202B2 (en) * | 2016-04-28 | 2019-08-13 | Varex Imaging Corporation | Electronic focal spot alignment of an x-ray tube |
| CN108937976A (zh) * | 2017-05-27 | 2018-12-07 | 上海西门子医疗器械有限公司 | X射线系统、测量x射线管的焦点的偏移的方法、准直器 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06269439A (ja) * | 1993-03-16 | 1994-09-27 | Hitachi Ltd | X線ct装置及びx線発生装置 |
| JPH06335477A (ja) * | 1993-05-27 | 1994-12-06 | Shimadzu Corp | X線ct装置 |
| JP2000093418A (ja) * | 1998-09-22 | 2000-04-04 | Toshiba Corp | X線検出装置およびx線イメージング装置 |
| JP2006024522A (ja) * | 2004-07-09 | 2006-01-26 | Shimadzu Corp | X線発生装置 |
| DE102005031893A1 (de) * | 2005-07-07 | 2007-01-18 | Siemens Ag | Verfahren zur Fokusjustage in einem CT |
| JP2007282740A (ja) * | 2006-04-14 | 2007-11-01 | Hitachi Medical Corp | X線ct装置 |
-
2008
- 2008-06-25 JP JP2008165830A patent/JP5501577B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010005015A (ja) | 2010-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5501577B2 (ja) | X線ct装置 | |
| US20100074392A1 (en) | X-ray tube with multiple electron sources and common electron deflection unit | |
| RU2529497C2 (ru) | Компенсация колебаний анода в рентгеновских трубках с вращающимся анодом | |
| US9208986B2 (en) | Systems and methods for monitoring and controlling an electron beam | |
| EP2465131B1 (en) | X-ray tube with independent x- and z- dynamic focal spot deflection | |
| JP6742061B2 (ja) | 荷電粒子線装置 | |
| JP2007014783A (ja) | コンピュータ断層撮影装置における焦点調整方法 | |
| JP7114525B2 (ja) | 異なるエネルギーレベルおよび焦点スポット位置で撮像するように構成されたコンピュータ断層撮影システムおよび方法 | |
| JPWO2019008620A1 (ja) | X線ct装置 | |
| US8401143B2 (en) | Arrangement for three-dimensional electron beam tomography | |
| JP5295503B2 (ja) | X線発生装置およびx線ct装置 | |
| JP2010533356A (ja) | 放射線を測定するためのx線源 | |
| JP2017022054A (ja) | X線発生装置、x線装置、構造物の製造方法、及び構造物製造システム | |
| KR101939434B1 (ko) | X-선 스캐닝 시스템용 소스 파이어링 패턴의 최적화를 위한 x-선 촬상장치 | |
| CN102711618B (zh) | 利用组合的x和y焦斑偏转方法的x射线管 | |
| JP2008210702A (ja) | 荷電粒子ビーム装置及び印加電圧制御方法 | |
| US7497620B2 (en) | Method and system for a multiple focal spot x-ray system | |
| JP2013174495A (ja) | 検出装置、検出方法、構造物の製造方法 | |
| CN110584697B (zh) | 一种校准飞焦点控制和数据采集之间相位差的方法 | |
| JP2015116408A (ja) | X線ct装置及び不良素子補正方法 | |
| JP6529596B2 (ja) | X線ct装置及びx線ct装置における焦点位置制御方法 | |
| JP2023143444A (ja) | X線撮影装置 | |
| JP5242155B2 (ja) | X線ct装置 | |
| CN219626586U (zh) | 阴极单元化的x射线发射装置及静态ct成像系统 | |
| JP7041207B2 (ja) | 荷電粒子ビーム装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A625 | Written request for application examination (by other person) |
Free format text: JAPANESE INTERMEDIATE CODE: A625 Effective date: 20110309 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121225 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130322 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131007 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131225 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140210 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140312 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5501577 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |