JP5397663B2 - 車両用操舵装置 - Google Patents
車両用操舵装置 Download PDFInfo
- Publication number
- JP5397663B2 JP5397663B2 JP2008184334A JP2008184334A JP5397663B2 JP 5397663 B2 JP5397663 B2 JP 5397663B2 JP 2008184334 A JP2008184334 A JP 2008184334A JP 2008184334 A JP2008184334 A JP 2008184334A JP 5397663 B2 JP5397663 B2 JP 5397663B2
- Authority
- JP
- Japan
- Prior art keywords
- housing
- electric motors
- steering
- actuator
- terminal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
- Motor Or Generator Frames (AREA)
Description
本発明は上記課題に鑑みてなされたものであり、複数のアクチュエータを用いる場合にも組立が容易である車両用操舵装置を提供することを目的とする。
また、上記アクチュエータは、複数の電動モータを含み、上記ハウジングは、上記複数の電動モータが固定された上記固定部材としてのモータ固定部材(26)を含み、上記第1の端子は、上記複数の電動モータに設けられ、上記第2の端子は、上記モータ固定部材に固定された内部カプラ(137)に設けられているので、下記の利点がある。
また、上記接続部材は、ハウジング外に露出する外部カプラ(131)を含み、上記外部カプラは、上記第2の端子に接続された第3の端子(140)を有している場合がある(請求項2)。この場合、外部カプラを用いて、ハウジング内の複数の電動モータに、容易に、例えば給電することができる。
また、上記接続部材は、上記カバーハウジングの外面(451)に配置された外部カプラ(137A)を含み、上記外部カプラは第3の端子(140A)を含み、上記第2の端子および上記第3の端子は、上記カバーハウジングの内面(452)に沿わされたフレキシブルプリント基板(143)を介して、互いに接続されている場合がある(請求項4)。この場合、通例、電動モータに用いられている、いわゆる電線ケーブルを廃止することができる。フレキシブルプリント基板であれば、スペースを要さず、取りまわしも容易である。ただし、フレキシブルプリント基板は、FPC(フレキシブル・プリンテッド・サーキット)のことを意味する。
以下、添付図面を参照しつつ本発明の実施の形態について説明する。図1は、本発明の一実施形態の車両用操舵装置としての電動パワーステアリング装置の構成を模式的に示す概略図である。
図1を参照して、電動パワーステアリング装置1は、ステアリングホイール等の操舵部材2に連結しているステアリングシャフト3と、ステアリングシャフト3に自在継手4を介して連結される中間軸5と、中間軸5に自在継手6を介して連結されるピニオン軸7と、ピニオン軸7の端部近傍に設けられたピニオン歯7aに噛み合うラック歯8aを有して自動車の左右方向に延びる転舵軸としてのラックバー8とを有している。ピニオン軸7およびラックバー8により、ラックアンドピニオン機構からなる舵取り機構Aが構成されている。
操舵部材2が操作されてステアリングシャフト3が回転されると、この回転がピニオン歯7aおよびラック歯8aによって、自動車の左右方向に沿ってのラックバー8の直線運動に変換される。これにより、転舵輪11の転舵が達成される。
トーションバー12を介するアッパーおよびロアーシャフト3a,3b間の相対回転変位量により操舵トルクを検出するトルクセンサ13が設けられており、このトルクセンサ13のトルク検出結果は、ECU(Electronic Control Unit :電子制御ユニット)14に与えられる。ECU14では、トルク検出結果や車速センサ15から与えられる車速検出結果等に基づいて、操舵力(本実施の形態では操舵補助力)を発生するためのアクチュエータとしての第1および第2の電動モータ161,162を駆動制御する。
第1および第2の電動モータ161,162と、第1の減速機構17と、第1および第2の電動モータ161,162並びに第1の減速機構17を収容するハウジング19とを含む単一のユニットとしてのサブアセンブリSAが構成されている。
第2の減速機構18は、第1および第2の電動モータ161,162により第1の減速機構17を介して回転駆動されるウォーム軸23と、このウォーム軸23に噛み合うと共にステアリングシャフト3のロアーシャフト3bに同行回転可能に連結されたウォームホイール24を備えている。すなわち第2の減速機構18はウォームギヤ機構により構成されている。
ベース板25およびモータ固定板26の間に、両板25,26間の間隔を規制するための複数の筒状のスペーサ29が介在している。そのスペーサ29に挿通された固定ねじ30を用いて、両板25,26が互いに固定されている。例えば、モータ固定板26のねじ挿通孔を挿通した固定ねじ30が、ベース板25に形成されたねじ孔31にねじ込まれることにより、ベース板25およびモータ固定板26の間にスペーサ29が挟持され、その結果、ベース板25およびモータ固定板26が互いに固定されている。
具体的には、モータ固定板26の第1の面37側から、モータ固定板26のねじ挿通孔40を通して、モータハウジング39の端壁41のねじ孔42にねじ込まれた固定ねじ43を用いて、モータハウジング39が、モータ固定板26に固定されている。
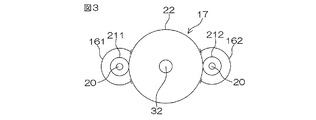
各電動モータ161,162のモータハウジング39の端壁41から、回転軸20が突出しており、回転軸20は、モータ固定板26に形成された挿通孔44を挿通して、ベース板25およびモータ固定板26間に延びている。各電動モータ161,162の回転軸20の端部にそれぞれ取り付けられた駆動歯車211,212が、共通の従動歯車22に噛み合っている。
図2を参照して、第1および第2の電動モータ161,162および第1の減速機構17を収容するハウジング19は、ベース板25と筒状のカバーハウジング45とを組み合わせて構成されており、内部に収容空間を区画している。カバーハウジング45は、一端46aが開放し第2の支持板26の周囲を取り囲む筒状部46と、その筒状部46の他端46bを閉塞する端壁47とを有している。カバーハウジング45の端壁47の内面47aとモータ固定板26との間に、第1および第2の電動モータ161,162が配置されている。
図5を参照して、支軸32は、従動歯車22とは同行回転可能に且つ軸方向に同行移動可能に設けられている。支軸32は軸方向に浮動状に支持されている。具体的には、第1の軸受35は、ベース板25の第1の支持孔33に圧入された外輪51と、支軸32がルーズフィットで嵌合された内輪52と、外輪51および内輪52の間に介在する転動体53とを有する玉軸受からなる。
支軸32の外周には、支軸32の軸方向に同行移動可能な環状の第1および第2の押圧板54,55が取り付けられている。第1の押圧板54は、第1の軸受35と従動歯車22との間に配置され、第1の軸受35の内輪52の端面52aと第1の押圧板54との間に、例えばゴム製の環状の弾性部材56が圧縮状態で介在している。
したがって、従動歯車22に働くスラスト力を弾性部材56,57によって弾性的に受けることができるので、上記スラスト力に起因した、駆動歯車211,212および従動歯車22の伝達効率の低下を抑制することができ、また、上記スラスト力に起因して支軸32と各支持板25,26との間に発生する振動を抑制することができる。
ウォームホイール24は、ステアリングシャフト3のロアーシャフト3bの軸方向中間部に同行回転可能に且つ軸方向移動不能に連結されている。ウォームホイール24は、ロアーシャフト3bに一体回転可能に結合される環状の芯金58と、芯金58の周囲を取り囲み外周に歯部59aを形成した合成樹脂部材59とを備える。芯金58は、例えば合成樹脂部材59の樹脂成形時に金型内にインサートされるものである。
第3および第4の軸受64,65の内輪66,67が、それぞれ、ウォーム軸23の第1および第2の端部23a,23bに一体回転可能に嵌合されている。各内輪66,67は、ウォーム軸23の対応する互いに逆向きの位置決め段部23d,23eに、それぞれ当接している。第3および第4の軸受66,67の外輪68,69は、ギヤハウジング27の対応する軸受保持孔70,71に保持されている。
上述した給電用の外部カプラ131から第1および第2の電動モータ161,162までの電気的接続は、図6に示すような接続部材130により実現される。具体的には、接続部材130は、第1および第2の電動モータ161,162をハウジング19の一部であるモータ固定板26に連結する動作(図6において矢印で示されている動作)に伴って、互いに接続される第1の端子135および第2の端子136を含んでいる。
一方、第2の端子136は、モータ固定板26に固定された内部カプラ137に設けられている。すなわち、内部カプラ137は、モータ固定板26に固定されたカプラハウジング138と、上記第2の端子136とを有している。
他方、外部カプラ131は、モータ固定板26の外周部に固定されたカプラハウジング139と、カプラハウジング139内に保持された第3の端子140とを有している。内部カプラ137の第2の端子136と外部カプラ131の第3の端子140とは、モータ固定板26に設けられた導電部材141,142を介して、互いに接続されている。
本実施の形態によれば、組立のために電動モータ161,162をハウジング19の一部であるモータ固定板26に連結するときに、同時に、電動モータ161,162を外部と電気的に接続するための接続部材130の第1および第2の端子135,136を互いに接続することができるので、組立作業が格段に容易になる。
また、接続部材130が、ハウジング19外に露出する外部カプラ131を含んでおり、外部カプラ131に設けられた第3の端子140が、内部カプラ137に設けられた第2の端子136に接続されているので、外部カプラ131を用いて、ハウジング19内の複数の電動モータ161,162に、容易に給電することができる。
特に、小型で高回転型の電動モータ161,162と高減速比の第1の減速機構17を組み合わせることで、小型でも、高出力を得ることが可能となる。また、複数の電動モータ161,162および第1の減速機構17等をサブアセンブリSAとし予め組み立てておくことができるので、組み立て性がよい。
また、内部カプラ137Aの第2の端子136Aおよび外部カプラ131Aの第3の端子140Aが、ハウジング19の内面としてのカバーハウジング45の内面452に沿わされたフレキシブルプリント基板143を介して、互いに接続されている。
本実施の形態では、図5の実施の形態で設けられていた押圧板54,55および弾性部材56,57は廃止されている。本実施の形態において、図2の実施の形態と同じである構成要素には同一の符号を付してある。
具体的には、下記の表1のモード1に示すように、通常動作のときは、第1の電動モータ161を左右の操舵に用い、残りの第2の電動モータ162を右操舵のみに用い、第3の電動モータ163を左操舵のみに用いる場合がある。この場合、左操舵および右操舵のそれぞれにおいて、2つの電動モータを用いることになり、各操舵のための十分な出力を得ることができる。

モード2では、第1の電動モータ161に対する駆動制御を停止し、且つ、正常に機能している第2および第3の電動モータ162,163を、それぞれ、通常のときと同じように、右操舵および左操舵にそれぞれ寄与させる。ただし、フェールのときには、操舵のための出力が、通常のときの出力の半分となる。
次いで、右操舵に用いていた第2の電動モータ162にフェールが発生したときには、モード4の制御を実施するようにしてもよいし、また、モード4に代えて、モード5の制御を実施するようにしてもよい。
モード6では、第3の電動モータ163に対する駆動制御を停止し、且つ、正常に機能している第1の電動モータ161および第2の電動モータ162を、通常のときと同じように機能させる。すなわち、第1の電動モータ161を左操舵および右操舵に寄与させる。また、第2の電動モータ162を右操舵のみに寄与させる。ただし、モード6では、フェールのときに左操舵のための出力が、通常のときの半分となる。
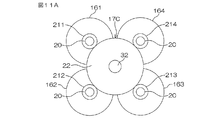
4つの電動モータ161〜164を設ける場合、下記の表2のモード1に示すように、通常動作のときは、第1および第3の電動モータ161,163を右操舵のみに用い、第2および第4の電動モータ162,164を左操舵のみに用いる場合がある。この場合、左操舵および右操舵のそれぞれにおいて、2つの電動モータを用いることになり、各操舵のための十分な出力を得ることができる。
本実施の形態では、無端帯83の取りまわしの自由度が高いので、駆動プーリ811〜814および従動プーリ82の設置の自由度を高くすることができる。ひいては、スペースの狭い箇所にも車両用操舵装置1を設置することが可能となる。
本発明は上記各実施の形態に限定されるものではなく、例えば、図2の実施の形態のように駆動部材、従動部材として駆動歯車211,212、従動歯車22を用いる場合において、従動歯車22の回転角を検出する回転角センサ74に代えて、図13に示すように、何れか1つの駆動歯車211,212の回転角を検出する回転角センサ74Aを設けるようにしてもよいし、また、上記の回転角センサ74に代えて、図14に示すように何れか1つの電動モータ161,162の回転軸20の回転角を検出する回転角センサ74Bを設けるようにしてもよい。
また、図9Aの実施の形態のように駆動部材および従動部材に駆動プーリ、従動プーリを採用する場合において、図示していないが、従動プーリ82(複数の従動プーリが設けられる場合には、何れか1つの従動プーリ)の回転角を検出する回転角センサを用いてもよいし、駆動プーリ811〜814の何れか1つの回転角を検出する回転角センサを用いてもよいし、電動モータ161〜164の何れか1つの回転角を検出する回転角センサを用いてもよい。
Claims (4)
- 操舵力を発生するためのアクチュエータと、
上記アクチュエータに接続された減速機構と、
上記減速機構に接続された舵取り機構と、
上記アクチュエータが固定された固定部材を含み、上記アクチュエータおよび上記減速機構を収容するハウジングと、
上記アクチュエータを外部配線と電気的に接続するための接続部材と、を備え、
上記接続部材は、上記アクチュエータおよび上記ハウジングを互いに連結する動作に伴って、互いに接続される第1および第2の端子を含み、
上記第1および第2の端子は、上記ハウジング内に配置されており、
上記アクチュエータは、複数の電動モータを含み、
上記ハウジングは、上記複数の電動モータが固定された上記固定部材としてのモータ固定部材を含み、
上記第1の端子は、上記複数の電動モータに設けられ、
上記第2の端子は、上記モータ固定部材に固定された内部カプラに設けられていることを特徴とする車両用操舵装置。 - 請求項1において、上記接続部材は、ハウジング外に露出する外部カプラを含み、上記外部カプラは、上記第2の端子に接続された第3の端子を有していることを特徴とする車両用操舵装置。
- 操舵力を発生するためのアクチュエータと、
上記アクチュエータに接続された減速機構と、
上記減速機構に接続された舵取り機構と、
上記アクチュエータが固定された固定部材を含み、上記アクチュエータおよび上記減速機構を収容するハウジングと、
上記アクチュエータを外部配線と電気的に接続するための接続部材と、を備え、
上記接続部材は、上記アクチュエータおよび上記ハウジングを互いに連結する動作に伴って、互いに接続される第1および第2の端子を含み、
上記第1および第2の端子は、上記ハウジング内に配置されており、
上記アクチュエータは、複数の電動モータを含み、
上記ハウジングは、上記複数の電動モータが固定された上記固定部材としてのモータ固定部材と、複数の電動モータおよび上記モータ固定部材を覆うカバーハウジングと、を含み、
上記カバーハウジングの端壁の内面と上記モータ固定部材との間に、複数の電動モータが配置され、
上記第1の端子は、上記複数の電動モータに設けられ、
上記第2の端子は、上記カバーハウジングの上記端壁の上記内面に固定された内部カプラに設けられていることを特徴とする車両用操舵装置。 - 請求項3において、上記接続部材は、上記カバーハウジングの外面に配置された外部カプラを含み、上記外部カプラは第3の端子を含み、
上記第2の端子および上記第3の端子は、上記カバーハウジングの内面に沿わされたフレキシブルプリント基板を介して、互いに接続されていることを特徴とする車両用操舵装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008184334A JP5397663B2 (ja) | 2008-07-15 | 2008-07-15 | 車両用操舵装置 |
| EP09797712.8A EP2305537B1 (en) | 2008-07-15 | 2009-07-15 | Vehicle steering device |
| PCT/JP2009/003342 WO2010007784A1 (ja) | 2008-07-15 | 2009-07-15 | 車両用操舵装置 |
| US13/054,382 US8708089B2 (en) | 2008-07-15 | 2009-07-15 | Vehicle steering apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008184334A JP5397663B2 (ja) | 2008-07-15 | 2008-07-15 | 車両用操舵装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010023564A JP2010023564A (ja) | 2010-02-04 |
| JP2010023564A5 JP2010023564A5 (ja) | 2012-07-05 |
| JP5397663B2 true JP5397663B2 (ja) | 2014-01-22 |
Family
ID=41729794
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008184334A Expired - Fee Related JP5397663B2 (ja) | 2008-07-15 | 2008-07-15 | 車両用操舵装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5397663B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024101400A1 (ja) * | 2022-11-09 | 2024-05-16 | 株式会社ミツバ | 駆動装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3538944B2 (ja) * | 1995-03-24 | 2004-06-14 | 株式会社デンソー | 電動式パワーステアリング装置 |
| GB9619175D0 (en) * | 1996-09-13 | 1996-10-23 | Lucas Ind Plc | Electrical power-assisted steering systems |
| US6481526B1 (en) * | 2000-11-13 | 2002-11-19 | Delphi Technologies, Inc. | Steer-by-wire handwheel actuator incorporating mechanism for variable end-of-travel |
| JP3816353B2 (ja) * | 2001-05-25 | 2006-08-30 | 三菱電機株式会社 | 電動パワーステアリング装置用モータ |
| JP2004224280A (ja) * | 2003-01-24 | 2004-08-12 | Koyo Seiko Co Ltd | 電動式パワーステアリング装置 |
| JP4181475B2 (ja) * | 2003-10-20 | 2008-11-12 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
-
2008
- 2008-07-15 JP JP2008184334A patent/JP5397663B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010023564A (ja) | 2010-02-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4868215B2 (ja) | 電動パワーステアリング装置 | |
| KR100651141B1 (ko) | 자동차의 전기식 동력 보조 조향 장치 | |
| JP6020893B2 (ja) | 電動パワーステアリング装置 | |
| JP5418834B2 (ja) | 電動パワーステアリング装置 | |
| EP1783031B1 (en) | Electric automotive power steering with a belt-type transmission | |
| JP2005329784A (ja) | 電動パワーステアリング装置 | |
| JP2006175891A (ja) | 電動パワーステアリング装置 | |
| JP2007186021A (ja) | 電動パワーステアリング装置 | |
| US9108666B2 (en) | Steering system in a vehicle | |
| JP2005212623A (ja) | 電動パワーステアリング装置 | |
| JP5088527B2 (ja) | 電動パワーステアリング装置 | |
| JP5011706B2 (ja) | 車両用操舵装置 | |
| JP2006027321A (ja) | 電動パワーステアリング装置 | |
| JP5282939B2 (ja) | 車両用操舵装置 | |
| JP4520804B2 (ja) | 電動パワーステアリング装置 | |
| JP5397663B2 (ja) | 車両用操舵装置 | |
| JP2019089355A (ja) | パワーステアリング装置 | |
| JP5294010B2 (ja) | 車両用操舵装置 | |
| JP4811648B2 (ja) | 電動パワーステアリング装置 | |
| JP5397662B2 (ja) | 車両用操舵装置 | |
| JP4085878B2 (ja) | 電動パワーステアリング装置 | |
| JP2007050752A (ja) | 電動パワーステアリング装置 | |
| JP2007290462A (ja) | 電動パワーステアリング装置 | |
| JP2010223320A (ja) | 伝達比可変装置 | |
| JP2010149573A (ja) | 電動パワーステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110624 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120423 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120518 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130502 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130527 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130926 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131009 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5397663 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |