JP5328074B2 - 改善された電気生理学的カテーテル - Google Patents
改善された電気生理学的カテーテル Download PDFInfo
- Publication number
- JP5328074B2 JP5328074B2 JP2004548623A JP2004548623A JP5328074B2 JP 5328074 B2 JP5328074 B2 JP 5328074B2 JP 2004548623 A JP2004548623 A JP 2004548623A JP 2004548623 A JP2004548623 A JP 2004548623A JP 5328074 B2 JP5328074 B2 JP 5328074B2
- Authority
- JP
- Japan
- Prior art keywords
- distal end
- tip assembly
- catheter
- shaft
- assembly
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000002001 electrophysiology Methods 0.000 title claims abstract description 14
- 230000007831 electrophysiology Effects 0.000 title claims abstract description 14
- 239000000853 adhesive Substances 0.000 claims abstract description 73
- 230000001070 adhesive effect Effects 0.000 claims abstract description 73
- 239000012530 fluid Substances 0.000 claims abstract description 66
- 230000008859 change Effects 0.000 claims description 22
- 230000004044 response Effects 0.000 claims description 11
- 238000000034 method Methods 0.000 abstract description 48
- 210000002216 heart Anatomy 0.000 abstract description 24
- 230000004807 localization Effects 0.000 abstract 1
- 239000000463 material Substances 0.000 description 49
- 238000013507 mapping Methods 0.000 description 46
- 238000005452 bending Methods 0.000 description 28
- 230000007935 neutral effect Effects 0.000 description 27
- 238000009826 distribution Methods 0.000 description 25
- 230000033001 locomotion Effects 0.000 description 24
- 206010052428 Wound Diseases 0.000 description 21
- 208000027418 Wounds and injury Diseases 0.000 description 21
- 210000003492 pulmonary vein Anatomy 0.000 description 19
- 210000003811 finger Anatomy 0.000 description 17
- 206010003119 arrhythmia Diseases 0.000 description 16
- 238000005259 measurement Methods 0.000 description 15
- 210000001519 tissue Anatomy 0.000 description 15
- 230000007423 decrease Effects 0.000 description 13
- 230000002829 reductive effect Effects 0.000 description 13
- 239000004593 Epoxy Substances 0.000 description 12
- 210000004204 blood vessel Anatomy 0.000 description 12
- 230000006793 arrhythmia Effects 0.000 description 11
- 230000007246 mechanism Effects 0.000 description 11
- 230000006870 function Effects 0.000 description 10
- 241001465754 Metazoa Species 0.000 description 9
- 238000010586 diagram Methods 0.000 description 9
- 210000005003 heart tissue Anatomy 0.000 description 8
- 238000002347 injection Methods 0.000 description 8
- 239000007924 injection Substances 0.000 description 8
- 210000005246 left atrium Anatomy 0.000 description 8
- 239000004033 plastic Substances 0.000 description 8
- 229920003023 plastic Polymers 0.000 description 8
- 229910001220 stainless steel Inorganic materials 0.000 description 8
- 206010003658 Atrial Fibrillation Diseases 0.000 description 7
- 238000010438 heat treatment Methods 0.000 description 7
- 239000010935 stainless steel Substances 0.000 description 7
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 6
- 239000002872 contrast media Substances 0.000 description 6
- 230000000694 effects Effects 0.000 description 6
- 210000002414 leg Anatomy 0.000 description 6
- HLXZNVUGXRDIFK-UHFFFAOYSA-N nickel titanium Chemical compound [Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni] HLXZNVUGXRDIFK-UHFFFAOYSA-N 0.000 description 6
- 229910001000 nickel titanium Inorganic materials 0.000 description 6
- 230000036316 preload Effects 0.000 description 6
- 230000001954 sterilising effect Effects 0.000 description 6
- 238000004659 sterilization and disinfection Methods 0.000 description 6
- 230000003247 decreasing effect Effects 0.000 description 5
- 239000003814 drug Substances 0.000 description 5
- 229940079593 drug Drugs 0.000 description 5
- 210000002837 heart atrium Anatomy 0.000 description 5
- 230000002093 peripheral effect Effects 0.000 description 5
- -1 polyethylene Polymers 0.000 description 5
- 210000005245 right atrium Anatomy 0.000 description 5
- 238000002679 ablation Methods 0.000 description 4
- 229910052782 aluminium Inorganic materials 0.000 description 4
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 4
- 230000000712 assembly Effects 0.000 description 4
- 238000000429 assembly Methods 0.000 description 4
- 230000036760 body temperature Effects 0.000 description 4
- 230000000747 cardiac effect Effects 0.000 description 4
- 230000002169 extracardiac Effects 0.000 description 4
- 238000002595 magnetic resonance imaging Methods 0.000 description 4
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 4
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 3
- 210000003484 anatomy Anatomy 0.000 description 3
- 239000000560 biocompatible material Substances 0.000 description 3
- 239000011248 coating agent Substances 0.000 description 3
- 238000000576 coating method Methods 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 239000000428 dust Substances 0.000 description 3
- 210000003191 femoral vein Anatomy 0.000 description 3
- 239000002783 friction material Substances 0.000 description 3
- 238000000691 measurement method Methods 0.000 description 3
- 229910052751 metal Inorganic materials 0.000 description 3
- 229910052759 nickel Inorganic materials 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 239000010936 titanium Substances 0.000 description 3
- 229910052719 titanium Inorganic materials 0.000 description 3
- 238000002604 ultrasonography Methods 0.000 description 3
- 210000003462 vein Anatomy 0.000 description 3
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 2
- 208000001871 Tachycardia Diseases 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 230000001154 acute effect Effects 0.000 description 2
- 210000000748 cardiovascular system Anatomy 0.000 description 2
- 150000001875 compounds Chemical class 0.000 description 2
- 238000007796 conventional method Methods 0.000 description 2
- 238000002594 fluoroscopy Methods 0.000 description 2
- 210000004491 foramen ovale Anatomy 0.000 description 2
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 2
- 229910052737 gold Inorganic materials 0.000 description 2
- 239000010931 gold Substances 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 238000003801 milling Methods 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000000465 moulding Methods 0.000 description 2
- 239000012811 non-conductive material Substances 0.000 description 2
- 230000036961 partial effect Effects 0.000 description 2
- 229910052697 platinum Inorganic materials 0.000 description 2
- 229920001296 polysiloxane Polymers 0.000 description 2
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 2
- 230000005855 radiation Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000000284 resting effect Effects 0.000 description 2
- 230000033764 rhythmic process Effects 0.000 description 2
- 229910052709 silver Inorganic materials 0.000 description 2
- 239000004332 silver Substances 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 238000003860 storage Methods 0.000 description 2
- 238000001356 surgical procedure Methods 0.000 description 2
- 230000006794 tachycardia Effects 0.000 description 2
- 210000003813 thumb Anatomy 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 210000001631 vena cava inferior Anatomy 0.000 description 2
- 229920000049 Carbon (fiber) Polymers 0.000 description 1
- 229920004943 Delrin® Polymers 0.000 description 1
- 241000282412 Homo Species 0.000 description 1
- 229920000271 Kevlar® Polymers 0.000 description 1
- 229920002614 Polyether block amide Polymers 0.000 description 1
- 239000004698 Polyethylene Substances 0.000 description 1
- 229920006362 Teflon® Polymers 0.000 description 1
- 201000008803 Wolff-Parkinson-white syndrome Diseases 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 239000003146 anticoagulant agent Substances 0.000 description 1
- 229960004676 antithrombotic agent Drugs 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 210000001367 artery Anatomy 0.000 description 1
- 230000001746 atrial effect Effects 0.000 description 1
- 210000001992 atrioventricular node Anatomy 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 244000309464 bull Species 0.000 description 1
- 239000004917 carbon fiber Substances 0.000 description 1
- 238000010000 carbonizing Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 239000000356 contaminant Substances 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000002059 diagnostic imaging Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000005553 drilling Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 210000001061 forehead Anatomy 0.000 description 1
- 210000003361 heart septum Anatomy 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000036512 infertility Effects 0.000 description 1
- 238000001802 infusion Methods 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 210000004731 jugular vein Anatomy 0.000 description 1
- 239000004816 latex Substances 0.000 description 1
- 229920000126 latex Polymers 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 229910001092 metal group alloy Inorganic materials 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical compound C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 210000003205 muscle Anatomy 0.000 description 1
- 230000004118 muscle contraction Effects 0.000 description 1
- 230000002107 myocardial effect Effects 0.000 description 1
- 210000004165 myocardium Anatomy 0.000 description 1
- 230000001338 necrotic effect Effects 0.000 description 1
- 238000013021 overheating Methods 0.000 description 1
- 230000037361 pathway Effects 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 239000000049 pigment Substances 0.000 description 1
- 239000006187 pill Substances 0.000 description 1
- 229920000573 polyethylene Polymers 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 239000004810 polytetrafluoroethylene Substances 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000005086 pumping Methods 0.000 description 1
- 230000002787 reinforcement Effects 0.000 description 1
- 238000002271 resection Methods 0.000 description 1
- 210000005241 right ventricle Anatomy 0.000 description 1
- 231100000241 scar Toxicity 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 210000001013 sinoatrial node Anatomy 0.000 description 1
- 229910000679 solder Inorganic materials 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
- 210000001321 subclavian vein Anatomy 0.000 description 1
- 210000004243 sweat Anatomy 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
- 238000012285 ultrasound imaging Methods 0.000 description 1
- 210000000689 upper leg Anatomy 0.000 description 1
- 230000002792 vascular Effects 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images


































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1492—Probes or electrodes therefor having a flexible, catheter-like structure, e.g. for heart ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/24—Detecting, measuring or recording bioelectric or biomagnetic signals of the body or parts thereof
- A61B5/25—Bioelectric electrodes therefor
- A61B5/279—Bioelectric electrodes therefor specially adapted for particular uses
- A61B5/28—Bioelectric electrodes therefor specially adapted for particular uses for electrocardiography [ECG]
- A61B5/283—Invasive
- A61B5/287—Holders for multiple electrodes, e.g. electrode catheters for electrophysiological study [EPS]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
- A61B5/6852—Catheters
- A61B5/6856—Catheters with a distal loop
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
- A61B18/1815—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using microwaves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00273—Anchoring means for temporary attachment of a device to tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00345—Vascular system
- A61B2018/00351—Heart
- A61B2018/00375—Ostium, e.g. ostium of pulmonary vein or artery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00791—Temperature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/1206—Generators therefor
- A61B2018/1286—Generators therefor having a specific transformer
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1405—Electrodes having a specific shape
- A61B2018/1407—Loop
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1405—Electrodes having a specific shape
- A61B2018/1435—Spiral
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1467—Probes or electrodes therefor using more than two electrodes on a single probe
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Public Health (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Physics & Mathematics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- General Health & Medical Sciences (AREA)
- Cardiology (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Plasma & Fusion (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Otolaryngology (AREA)
- Physiology (AREA)
- Media Introduction/Drainage Providing Device (AREA)
- Surgical Instruments (AREA)
Description
現在の理解によれば、心房細動は肺静脈の一つのオリフィス又はその内部からの焦点トリガーにより、しばしば開始される。これらのトリガーのマッピング及び切除は、発作的な心房細動を起こした患者を治療するように見えるが、無線周波数による「一点」の傷で、最も早期に活動した箇所をマッピングし除去することを介して焦点トリガーを除去することには、幾つかの制限が存在している。これらの制限を回避する一つの方法は、最も早期に活動した位置を正確に決定することである。一旦、最も早期に活動した位置が同定されたならば、傷を用いてトリガーを電気的に孤立させるように傷を発生することができる。それらの静脈内部からの点火は無くされるか、又は、心房のボディに到達できなくなり、かくして、心房細動をトリガーすることができなくなる。
続的な傷を形成しようとする努力において小口の周りに多数の点源を適用する工程を備えている。そのような技術は、比較的複雑であり、かなりの技術と、手術を実行する臨床医からの注意とを必要としている。
この説明では、本発明の様々な態様及び特徴が説明される。当業者は、本特徴を、特定の用途に応じた装置内に選択的に組み合わせることができる。更には、様々な任意特徴を、カテーテルや、これに連係するマッピング及び/又は除去処置のため使用する方法内に組み込むことができる。
カテーテル概観
ここで、本発明に係る心電図処置で使用するためのマッピング及び/又は除去カテーテルシステムの概観を示す図1を参照する。本システムは、可撓性シャフト110と、制御ハンドル120と、コネクター130と、を有するカテーテル100を備えている。マッピング用途で使用されるとき、例えば記録装置160等の信号を記録するための装置に接続されるべきカテーテル100の末端部におけるマッピング電極から信号ワイヤが延在することを可能にするためコネクター130が使用される。詳細を更に後述されるように、カテーテル100の末端部は、別々のマッピング電極及び/又は除去電極を備えていてもよく、又は、マッピング及び除去の両方のために適した電極を備えていてもよい。
(先端アッセンブリ)
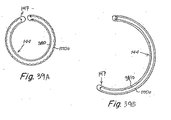
図2乃至図4は、本発明の一実施例に係る末端部の先端アッセンブリを示している。本実施例によれば、先端アッセンブリ140の基端部142は、シャフト110の長さ方向軸に対して約90度の曲がり部148と、これに続いて形成された弧状湾曲末端部144と、を備えている。図2乃至図4に表される実施例では、約90度の曲がり部148が固定され、即ち、先端アッセンブリ140の基端部142に永久的に形成され、それにより、約90度の曲がり部148が体温でその形状を維持するようにする。他の実施例では、約90度の曲がり部148が作働的であってもよく、即ち、図21に関連して更に後述されるように、ハンドル120上のアクチュエータ122,124の一つに取り付けられた引っ張り又は押しケーブルを介してシャフト110の長さ方向軸(L)に対して約ゼロ度から約90度の間で移動可能であってもよい。
先端アッセンブリの操舵及び制御
図11は、図2の末端部の先端アッセンブリ140の拡大端面図である。図11に示されるように、本発明の一実施例では、先端アッセンブリ140の末端部144は、一対のケーブル1110a及び1110bを備え、該ケーブルを、先端アッセンブリの末端部144の曲率半径(又は直径)を第1の直径から第2の直径へと変化させるため使用することができる。図11に示された実施例では、先端アッセンブリは、中央管腔1125や、該中央管腔1125の回りに配置された4つの同軸管腔1128a〜dを始めとした、複数の管腔を備えるコア1120を備えている。中央管腔1125は、先端アッセンブリ140の末端部144に沿って配置された各々の電極146、147に取り付けられた1つ以上の導電ワイヤ(図11には図示せず)を保持するため使用されている。4つの同軸管腔1128a〜dは、ケーブルを保持するため使用されてもよい。該ケーブルは、シャフト110に対して先端アッセンブリ140の配位を制御すると共に、先端アッセンブリ140の末端部144の曲率半径を制御する。図11に示されるように、2つのケーブル1110a及び110bは、先端アッセンブリ140の末端部144の長さに沿って延在し、2つの他のケーブル(図示せず)は、末端部144の前で終わっている。図11に示された実施例では、2つのケーブル1110a及び1110bの端部は、一緒に結合され、先端アッセンブリ140の最末端部に隣接してエポキシが注入される。本実施例では、ケーブル1110a及び1110bは、先端アッセンブリ140の末端部144の曲率半径を制御するため使用される。
及びチタンの混合物を含み、形状記憶特性及び超弾性特性を示す、中間材料のファミリーである。ニチノールは、特定の形状に設定することができ、変形後にその形状に戻り、即ちスプリングバックする。超弾性ワイヤの所望の非変形形状を設定するため、所望の形状にワイヤを拘束し、適切な熱処理を加えてもよい。例えば、カテーテル100の先端アッセンブリ140の末端部144は、図5乃至図10に関して説明されたジグ等のジグ内に配置され、超弾性ワイヤの形状が設定されるまで、加熱されてもよい。1〜5分の間に400〜500℃の温度を加えるのが当該形状を設定する上で十分となる。
作動的曲がり部
上記したように、末端部の先端アッセンブリ140における約90度の曲がり部は、固定されているか(例えば、以下の図5乃至図10に関して詳細に記載された、例えばジグ500、700及び900等のジグの使用で永久的に形成される)、又は、ハンドル120上に配置されたアクチュエータ122、124の使用により作動的である(例えば、カテーテル100のシャフト110の長さ方向軸に対して約0度乃至約90度の間で移動可能である)かのいずれであってもよい。図21及び図21Aは、そのような「作動的曲がり部」を備える本発明の一実施例を示している。
図66〜図72は、本発明の更なる実施例を示しており、該実施例によれば、特定の形態を有するカテーテルの一部分に偏倚を分与するため超弾性チャンネルを使用することができ、これにより、当該一部分は変形後に当該形態にスプリングバックする。一例では、超弾性チャンネルは、カテーテルの管腔の一部分内に組み込まれてもよく、カテーテル部品(例えば、引っ張りケーブル、ワイヤ、又は、流体導管)、又は、そのような多数のカテーテル部品が、該管腔の該一部分を通過することを可能にする間にカテーテルを特定の形態に偏倚させる。別の例では、超弾性チャンネルは、カテーテル内部に組み込まれてもよきが、管腔内には組み込まれなくてもよい。例えば、当該チャンネルは、カテーテルの外側シースの一部をなしてもよく、又は、カテーテル内の多くの構造(例えば、管腔)を少なくとも部分的に覆う内部チャンネルであってもよい。
円形状チューブ、多側面チューブ(五角形又は八角形のチューブ)、又は、別の中空形状として形成されてもよい。超弾性チャンネル6810及び6910は、本文中で説明された一例としての超弾性材料の任意のもの、例えば、ニチノール又は、ニッケル及びチタニウムを含む別の組成分から形成されてもよい。一例では、超弾性チャンネル6810及び6910は、ストリング焼き入れされたステンレス鋼から形成される。
電極形態
上記したように、本発明の実施例は、先端アッセンブリの末端部に沿って配置された電極の特定の構成、型式又は数に限定されるものではない。例えば、本発明の実施例は、例えば図2に示されるように、末端部又はキャップ電極147の有無に関わらず、先端アッセンブリ140の末端部に沿って配置された複数の低プロフィールのリング式電極16を備えていてもよい。代替例として、末端部又はキャップ電極147の有無に関わらず、図15Aに示された電極1546等のように、複数の隆起プロフィールリング式電極を使用することができる。なお代替例として、隆起及び低プロフィール電極の組み合わせを使用することができる。
で単に集結するように機能する。キャップ電極1847が使用された場合、絶縁スペーサーは、移動可能電極1846がキャップ電極1847と電気的に接触することを防止するため該キャップ電極の基端側に配置することができる。
ハンドル
本発明の一実施例に係るハンドルアッセンブリが、図22乃至図33に示されている。これらの図面に示されたハンドル構成は、シャフト110の長さ方向軸に対して先端アッセンブリ140の配位を制御する引っ張りケーブル1110c及び1110dに印加された張力を選択的に制御するため指回し式円形板アクチュエータ122の回転運動を使用し、先端アッセンブリ140の末端部144の曲率半径を制御する引っ張りケーブル1110a及び1110bに印加された張力を選択的に制御するため摺動アクチュエータ124の直線運動を使用する。図22を参照すると、ハンドル120は、左側区分2200Lと、右側区分2200Rと、を有するハウジングを備える。これらの2つの区分2200L及び2200Rは、断面が幾分半円形であり、ハンドル120のための完全なハウジングを形成するため共通の平面に沿って互いに固定され得る平坦な接続表面を有する。ハンドル120の外側表面は、ユーザーにより快適に保持されるように輪郭が形成されている。
ョルダーナット2224と指回し円形板122との間に設けられる。ショルダーナット2224の締め上げは、指回し式円形板122に印加された摩擦量を増大させる。
対応する複数の移動止めと協働する。本実施例では、指回し円形板の下側表面の複数の移動止めの各々は、各々の移動止め内部に部分的に着座するボール又はベアリングを収容する。第1のニュートラル位置では、ボールの各々は、ハンドルの後方表面に夫々の移動止め内に載っており、指回し円形板及びそれに取り付けられた引張りケーブルに第1の量の摩擦を生じさせる。しかし、指回し円形板が回転されるとき、ボールは、ハンドルの後方表面において移動止めの外側に上記した隆起表面上に載っており、これにより、指回し円形板及びそれに取り付けられた引張りケーブルに第2の量のより大きい摩擦を生じさせる。一実施例によれば、この第2の量の摩擦は、指回し円形板がそのニュートラル位置に戻ることを防止するのに十分である。図22、26、27及び28は、本発明の本実施例に係る、指回し円形板アクチュエータ122のための異なる量の摩擦を分与するための手段の一つの装備を示している。
から離れる方に移動されるとき、傾斜部2610(及びスライダー2332)の形状は、スライダー2232をスライダーグリップ2252から分離しようとする追加の摩擦力を分与し、これにより、図24に示されるように、プリロードパッド2254をより大きな範囲にまで圧縮する。この追加の摩擦力は、摺動アクチュエータ124に更なる力が存在しない状態で、摺動アクチュエータ124が位置を変化させることに対抗する。
温度検出及び位置測定
温度検出工程は、先端アッセンブリ140の末端部144を取り囲む近傍領域の温度を測定することができる、幾つかの技術を参照している。温度を測定することは、組織を過熱し、炭化することを回避するため、特に除去処置の間に重要となる。本発明のカテーテルは、先端アッセンブリ140の末端部144の温度と、その上に配置されたマッピング電極の温度を同時に測定するため提供することができる。末端部144の温度は、除去エネルギー発生器170の制御のためのフィードバックを提供し、マッピング電極の温度を、除去される組織が実際に展開されるか又は非導電性にされていることを確かめるため監視することができる。
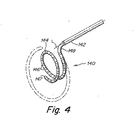
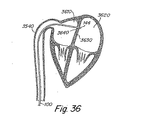
再び図34を参照すると、先端アッセンブリ140の末端部144は、位置測定のため使用することができる電磁センサー3450を備えていてもよい。電磁センサー3450を、例えば接着剤又は半田等の任意の適切な機構を使用してカテーテル10の先端アッセンブリ140内に固定することができる。電磁センサー3450は、電磁センサーの位置を示す信号を発する。ワイヤ3440は、電磁センサー3450をコントローラ150に電気的に接続し、発生した信号を、処理のためコントローラ150に送信することを可能にする。
本発明の別の実施例によれば、多数の電磁センサーを、カテーテル100の先端アッセンブリ140に設けることができる。図54は、電極4410a及び4410bを備える先端アッセンブリ140の末端部144内に配置された第1及び第2の電磁センサー3450a、3450bを示している。ワイヤ4420a及び4420bは、図1のコントローラ150に電磁センサー3450a及び3450bを電気的に接続し、ワイヤ4430a及び4430bは、コントローラ150に電極4410a及び4410bを電気的に接続する。図示の例では、第1及び第2の電磁センサー3450a及び3450bは、各々電極4410a及び4410bの下方に配置されている。かくして、第1及び第2の位置測定電磁センサー3450a及び3450bを、第1及び第2の電極4410a及び4410bの位置を示す際に使用することができる。電磁センサーは、対応する電極に隣接して配置されてもよく、又は、別の基端位置に配置されてもよいことが理解されるべきである。更には、センサーが先端アッセンブリ140上の任意の所望の位置に配置されるとき、電磁センサーと特別の電極との間に対応関係がある必要はない。
流体分配
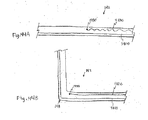
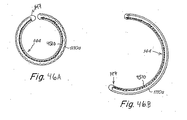
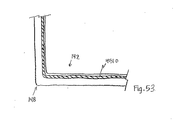
本願で説明されたカテーテル100は、医療画像形成及び/又は透視検査と関連して使用することができるので、電気生理学的処置の間に心血管系にコントラスト剤(例えば、X線コントラスト剤の大きい丸薬又は放射線不透明色素)を分配するのが望ましい。更には、カテーテル処置の間に、例えば抗血栓症剤等の薬剤を、心血管系に直接投与することが望ましい。図56及び図58は、例えば、本願で説明された実施例のカテーテル100内に組み込むことができる薬剤やコントラスト剤等の流体を分配するための一実施例の構造を示している。図示のように、先端アッセンブリ140は、第1及び第2の流体分配管腔4640及び4610を備えている。第1の流体分配管腔4640は、カテーテル100の中央管腔1125内に配置され、第2の流体分配管腔4610は、カテーテル100のコア1120内に埋め込まれる。第2の流体分配管腔4610は、前述された同軸管腔1128a〜dのうち任意のものであってもよく、或いは、追加された管腔であってもよい。第1及び第2の流体分配管腔4640及び4610は、それらを通過する流体の適切な流れを、個別的又は組み合わせのいずれかで、提供するため選択された各々の寸法を持っていてもよい。例えば、一つの設備手段では、流体分配管腔の結合された断面領域を、約0.064cm乃至約0.1cm(約0.025インチ乃至約0.039インチ)の間の直径を有する円柱管腔と等価であるように選択することができる。カテーテル100の末端部147の開口部4650と、カテーテル100の周辺表面上の開口部4620とは、第1及び第2の流体分配管腔のため各々提供されている。開口部4620は、カテーテル100からの流体出口の方向を差し向けるため角度を付けられた表面4630を備える。
様が可能であることが認められるべきである。カテーテル100を身体内に挿入することを可能とするシース又は導入器が、流体分配手段を備えることができる。図63は、カテーテル100のシャフト110が内部に配置されたシース2120を示している。シース2120は、流体注入マニホルド6310から末端開口部6350まで、上述された薬剤又はコントラスト剤等の流体を輸送するため少なくとも1つの流体分配管腔6330を備えている。流体注入マニホルド6310は、注射器又は流体注入装置(例えば、動力注入器)が基端開口部6360で連結され得る1つ以上の流体分配管腔6330内に流体を導入することを可能にするため、基端開口部6360が設けられている。流体は、シースの末端部に配置された1つ以上の末端開口部6350を通してシース2120から出ることができる。
先端アッセンブリを作るための方法
図5乃至図10は、弧状湾曲した末端部が続いて形成される約90度の固定曲がり部を有する先端アッセンブリを形成するため使用することができる幾つかの異なるジグを示している。これらのジグの各々は、完成されたカテーテル(即ち、既に完全に組み立てられたカテーテルであり、ハンドル120と、先端アッセンブリ140の末端部に配置された電極146、147と、を備える)、部分的に完成した先端アッセンブリ(即ち、シャフト110及びハンドル120(図1)にまだ取り付けられていない、電極146及び147を備える先端アッセンブリ140)、又は、未完成の先端アッセンブリ140(即ち、電極146、147が設けられていない先端アッセンブリ140)で使用さすることができる。
が変形しないように、熱的に安定であるべきである。一実施例では、ジグ500を形成するため使用される管は、直径が約6フレンチである先端アッセンブリ140に適合するため、約2.1cm(約0.83インチ)の外径と、約1.83cm(約0.72インチ)の内径と、を有するが、これらの寸法は、異なる直径の先端アッセンブリに適合するため変化させることができる。例えば、直径が10フレンチの先端アッセンブリに適合するため、より大きな直径の管が使用される。図5に示されるように、ジグ500の末端部は、約1.12cm(約0.44インチ)の内径及び約1.55cm(約0.61インチ)の外径とを有する円内に形成されている。本発明は、任意の特定の寸法に限定されないが、これらの寸法は、静止状態にある末端部144の曲率直径が約20mmである先端アッセンブリ140を形成するため使用することができる。更には、より詳細に後述されるように、これらの寸法は、ジグから除去した後、先端アッセンブリ140内の一定量のリバウンド(約15乃至20%)に帰着するように選択される。本発明の実施例は、静止状態で約20mmの曲率直径を有する先端アッセンブリには限定されないが、このサイズは、例えば肺静脈等の血管内に、マッピング及び/又は除去処置のためカテーテルを使用することを有利に可能にする。他の心臓内又は心臓外箇所に対して、他の寸法を使用することが
できることが理解されるべきである。
定の時間に亘って加熱した後、先端アッセンブリ140及びジグ700は、冷却が可能とされ、先端アッセンブリ140は、ジグ700から取り外される。
グ900を所定の温度で所定の時間に亘って加熱した後、先端アッセンブリ140及びジグ900は、冷却することを可能にされ、先端アッセンブリ140は、ジグ900から取り外される。
使用法
上記したように、本発明のカテーテルシステムは、マッピング及び/又は除去用途で使用されてもよい。本発明の一実施例では、マッピング又は除去は、患者の心臓内で実行される。マッピング用途では、多数の信号が、カテーテル上の多数の電極を介して心臓組織から受け取られてもよい。各電極は、心臓組織から、連続的な信号(心電図)を測定することができる。連続的な信号は、それが時間と共に変化するとき、参照信号に対する、電極と接触する心臓組織の電圧を表すことができる。参照電圧は、専用の参照電極又は別の測定電極を使用して得ることができる。各電極により受け取られた信号の品質は、電極のサイズ及び電極の遮断の両方が増加するとき改善する。
Claims (10)
- 電気生理学的カテーテルであって、
末端部及び基端部を有し、アクチュエータを備えるハンドルと、
基端部及び末端部を有する可撓性シャフトであって、該シャフトの長さに沿って延在する長さ方向軸を備え、該シャフトの前記基端部は前記ハンドルの前記末端部に取り付けられている、前記可撓性シャフトと、
基端部及び末端部を有する先端アッセンブリであって、該先端アッセンブリの前記基端部は前記シャフトの前記末端部に取り付けられ、該先端アッセンブリは、該先端アッセンブリの末端部で前記アクチュエータの動作に応答して少なくとも360度湾曲する弧状湾曲形状を備える第1の配位で該先端アッセンブリを支持する形態で硬化された接着剤を備え、前記湾曲形状は第1の曲率半径を有する、前記先端アッセンブリと、
前記アクチュエータ及び前記先端アッセンブリに取り付けられ、前記シャフト及び先端アッセンブリを通って延在する第1のケーブルであって、該第1のケーブルは、前記アクチュエータの動作に応答して、前記第1の配位から、前記第1の曲率半径より大きい第2の曲率半径を有する前記先端アッセンブリの末端部で弧状湾曲形状を備える第2の配位へと該先端アッセンブリの配位を変化させるように構成されている、前記第1のケーブルと、
前記アクチュエータ及び前記先端アッセンブリに取り付けられ、前記シャフトを通って延在する第2のケーブルであって、該第2のケーブルは、前記アクチュエータの動作に応答して、前記第2の配位から前記第1の配位へと前記先端アッセンブリの配位を変化させるように構成されている、前記第2のケーブルと、
を備える、電気生理学的カテーテル。 - 電気生理学的カテーテルであって、
末端部及び基端部を有し、アクチュエータを備えるハンドルと、
基端部及び末端部を有する可撓性シャフトであって、該シャフトの長さに沿って延在する長さ方向軸を備え、該シャフトの前記基端部は前記ハンドルの前記末端部に取り付けられている、前記可撓性シャフトと、
基端部及び末端部を有する先端アッセンブリであって、該先端アッセンブリの前記基端部は前記シャフトの前記末端部に取り付けられ、該先端アッセンブリの前記末端部は、曲率半径を有する弧状湾曲形状に偏倚されている、前記先端アッセンブリと、
前記アクチュエータ及び前記先端アッセンブリの末端部に取り付けられ、前記シャフト及び先端アッセンブリを通って延在するケーブルであって、該ケーブルは、前記アクチュエータの動作に応答して前記先端アッセンブリの末端部の曲率半径を変化させるように構成されている、前記ケーブルと、
前記シャフトの長さに沿って流体を伝達させ、前記先端アッセンブリから該流体を解放するための手段と、
を備え、
前記先端アッセンブリは、該先端アッセンブリの末端部で前記アクチュエータの動作に応答して少なくとも360度湾曲する弧状湾曲形状を備える第1の配位で該先端アッセンブリを支持する形態で硬化された接着剤を備える、電気生理学的カテーテル。 - 前記先端アッセンブリの基端部は、前記シャフトの長さ方向軸に対して約90度の固定曲がり部を備え、前記先端アッセンブリの末端部の弧状湾曲形状は、前記シャフトの長さ方向軸に略垂直である平面内で配位されている、請求項2に記載の電気生理学的カテーテル。
- 電気生理学的カテーテルであって、
末端部及び基端部を有し、アクチュエータを備えるハンドルと、
基端部及び末端部を有する可撓性シャフトであって、該シャフトの長さに沿って延在する長さ方向軸を備え、該シャフトの前記基端部は前記ハンドルの前記末端部に取り付けられている、前記可撓性シャフトと、
基端部及び末端部を有する先端アッセンブリであって、該先端アッセンブリの前記基端部は前記シャフトの前記末端部に取り付けられ、該先端アッセンブリの前記末端部は、曲率半径を有する弧状湾曲形状に偏倚されている、前記先端アッセンブリと、
前記アクチュエータ及び前記先端アッセンブリの末端部に取り付けられ、前記シャフト及び先端アッセンブリを通って延在するケーブルであって、該ケーブルは、前記アクチュエータの動作に応答して前記先端アッセンブリの末端部の曲率半径を変化させるように構成されている、前記ケーブルと、
前記シャフトの長さに沿って流体を伝達させるため前記シャフトに連結された少なくとも1つの管腔と、
前記流体を解放するため前記管腔内に形成された少なくとも1つの開口部であって、該開口部は、前記先端アッセンブリで前記シャフトに連結された前記管腔の一部分に配置されている、前記少なくとも1つの開口部と、
を備え、
前記先端アッセンブリは、該先端アッセンブリの末端部で前記アクチュエータの動作に応答して少なくとも360度湾曲する弧状湾曲形状を備える第1の配位で該先端アッセンブリを支持する形態で硬化された接着剤を備える、電気生理学的カテーテル。 - 前記先端アッセンブリの基端部は、前記シャフトの長さ方向軸に対して約90度の固定曲がり部を備え、前記先端アッセンブリの末端部の弧状湾曲形状は、前記シャフトの長さ方向軸に略垂直である平面内で配位されている、請求項4に記載の電気生理学的カテーテル。
- 前記管腔は、前記カテーテルのシャフト内に配置され、前記管腔内の前記少なくとも1つの開口部は、前記カテーテルの前記先端アッセンブリ内の少なくとも1つの開口部に連結されている、請求項4又は5に記載の電気生理学的カテーテル。
- 前記少なくとも1つの管腔は、前記シャフトの長さ方向軸に沿って配置された管腔を備える、請求項4乃至6のいずれか1項に記載の電気生理学的カテーテル。
- 前記少なくとも1つの管腔は、前記シャフトの長さ方向軸からオフセットされた軸に沿って配置された管腔を備える、請求項4乃至6のいずれか1項に記載の電気生理学的カテーテル。
- 前記管腔は、前記カテーテルのシャフトの外側に配置されている、請求項4乃至6のいずれか1項に記載の電気生理学的カテーテル。
- 前記少なくとも1つの開口部は、前記先端アッセンブリの一部分のところで前記固定曲がり部の基端側に前記シャフトに連結された管腔の一部分に配置されている、請求項4乃至9のいずれか1項に記載の電気生理学的カテーテル。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US42270702P | 2002-10-31 | 2002-10-31 | |
| US60/422,707 | 2002-10-31 | ||
| PCT/US2003/034828 WO2004039273A2 (en) | 2002-10-31 | 2003-10-31 | Electrophysiology catheter with biased tip |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006504473A JP2006504473A (ja) | 2006-02-09 |
| JP5328074B2 true JP5328074B2 (ja) | 2013-10-30 |
Family
ID=32230379
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004548623A Expired - Fee Related JP5328074B2 (ja) | 2002-10-31 | 2003-10-31 | 改善された電気生理学的カテーテル |
Country Status (4)
| Country | Link |
|---|---|
| US (3) | US20060241366A1 (ja) |
| EP (2) | EP3097882A1 (ja) |
| JP (1) | JP5328074B2 (ja) |
| WO (1) | WO2004039273A2 (ja) |
Families Citing this family (130)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6416510B1 (en) * | 1997-03-13 | 2002-07-09 | Biocardia, Inc. | Drug delivery catheters that attach to tissue and methods for their use |
| US20050010095A1 (en) * | 1999-04-05 | 2005-01-13 | Medtronic, Inc. | Multi-purpose catheter apparatus and method of use |
| US6702811B2 (en) * | 1999-04-05 | 2004-03-09 | Medtronic, Inc. | Ablation catheter assembly with radially decreasing helix and method of use |
| JP2005526531A (ja) * | 2001-10-19 | 2005-09-08 | シー・アール・バード・インコーポレーテッド | 殺菌時および係合時に保持力を維持するハンドル・サム・ホイール機構 |
| US8774913B2 (en) | 2002-04-08 | 2014-07-08 | Medtronic Ardian Luxembourg S.A.R.L. | Methods and apparatus for intravasculary-induced neuromodulation |
| US7653438B2 (en) | 2002-04-08 | 2010-01-26 | Ardian, Inc. | Methods and apparatus for renal neuromodulation |
| US20040082947A1 (en) | 2002-10-25 | 2004-04-29 | The Regents Of The University Of Michigan | Ablation catheters |
| US6973339B2 (en) * | 2003-07-29 | 2005-12-06 | Biosense, Inc | Lasso for pulmonary vein mapping and ablation |
| US7632266B2 (en) * | 2004-02-17 | 2009-12-15 | Boston Scientific Scimed, Inc. | Endoscopic devices and related methods of use |
| EP2384715B1 (en) * | 2004-03-05 | 2015-07-08 | Hansen Medical, Inc. | Robotic catheter system |
| US20060089637A1 (en) | 2004-10-14 | 2006-04-27 | Werneth Randell L | Ablation catheter |
| US8409191B2 (en) | 2004-11-04 | 2013-04-02 | Boston Scientific Scimed, Inc. | Preshaped ablation catheter for ablating pulmonary vein ostia within the heart |
| US8617152B2 (en) | 2004-11-15 | 2013-12-31 | Medtronic Ablation Frontiers Llc | Ablation system with feedback |
| US7429261B2 (en) | 2004-11-24 | 2008-09-30 | Ablation Frontiers, Inc. | Atrial ablation catheter and method of use |
| US7468062B2 (en) | 2004-11-24 | 2008-12-23 | Ablation Frontiers, Inc. | Atrial ablation catheter adapted for treatment of septal wall arrhythmogenic foci and method of use |
| CA2607935C (en) | 2005-05-05 | 2014-07-08 | Boston Scientific Limited | Preshaped localization catheter and system for graphically reconstructing pulmonary vein ostia |
| EP2759276A1 (en) | 2005-06-20 | 2014-07-30 | Medtronic Ablation Frontiers LLC | Ablation catheter |
| AU2006268238A1 (en) | 2005-07-11 | 2007-01-18 | Medtronic Ablation Frontiers Llc | Low power tissue ablation system |
| US8657814B2 (en) | 2005-08-22 | 2014-02-25 | Medtronic Ablation Frontiers Llc | User interface for tissue ablation system |
| EP1971285B1 (en) * | 2005-12-30 | 2012-01-18 | C.R.Bard, Inc. | Apparatus for ablation of cardiac tissue |
| JP4963319B2 (ja) | 2006-05-05 | 2012-06-27 | キャスリックス リミテッド | モジュールカテーテルアセンブリ |
| EP2716322A3 (en) * | 2006-05-08 | 2014-05-21 | Cathrx Ltd | Method of fabricating a sheath for a catheter |
| US20070270679A1 (en) | 2006-05-17 | 2007-11-22 | Duy Nguyen | Deflectable variable radius catheters |
| WO2008014557A1 (en) * | 2006-08-04 | 2008-02-07 | Cathrx Ltd | A catheter handle assembly |
| JP4027411B1 (ja) * | 2007-03-29 | 2007-12-26 | 日本ライフライン株式会社 | 電極カテーテル |
| EP1987761B1 (de) * | 2007-05-03 | 2019-10-23 | F. Hoffmann-La Roche AG | Schlauchförmiger Sensor zum Nachweis eines Analyten |
| US8641704B2 (en) | 2007-05-11 | 2014-02-04 | Medtronic Ablation Frontiers Llc | Ablation therapy system and method for treating continuous atrial fibrillation |
| ITBA20070049A1 (it) | 2007-06-14 | 2008-12-15 | Massimo Grimaldi | Cateteri per ablazione transcatetere per via percutanea di aritmie cardiache mediante radiofrequenza bipolare |
| EP2008598A1 (en) * | 2007-06-29 | 2008-12-31 | Edward A. Loeser | Composite fiber electrosurgical instrument |
| EP2231060B1 (en) * | 2007-12-10 | 2015-05-27 | Medtronic Ablation Frontiers LLC | Ablation catheter |
| US9061119B2 (en) | 2008-05-09 | 2015-06-23 | Edwards Lifesciences Corporation | Low profile delivery system for transcatheter heart valve |
| WO2009155526A2 (en) * | 2008-06-20 | 2009-12-23 | Angiodynamics, Inc. | Device and method for the ablation of fibrin sheath formation on a venous catheter |
| US20100069733A1 (en) * | 2008-09-05 | 2010-03-18 | Nathan Kastelein | Electrophysiology catheter with electrode loop |
| US10166067B2 (en) * | 2009-02-12 | 2019-01-01 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Ablation catheter and method for electically isolating cardiac tissue |
| US20100280320A1 (en) * | 2009-04-29 | 2010-11-04 | Hansen Medical, Inc. | Flexible and steerable elongate instruments with shape control and support elements |
| US9254123B2 (en) | 2009-04-29 | 2016-02-09 | Hansen Medical, Inc. | Flexible and steerable elongate instruments with shape control and support elements |
| WO2010138919A2 (en) | 2009-05-28 | 2010-12-02 | Angiodynamics, Inc. | System and method for synchronizing energy delivery to the cardiac rhythm |
| US9895189B2 (en) | 2009-06-19 | 2018-02-20 | Angiodynamics, Inc. | Methods of sterilization and treating infection using irreversible electroporation |
| WO2011019838A2 (en) * | 2009-08-14 | 2011-02-17 | Boston Scientific Scimed, Inc. | Systems and methods for making and using medical ablation systems having mapping catheters with improved anchoring ability |
| US9439721B2 (en) * | 2009-08-25 | 2016-09-13 | Medtronic Ablation Frontiers Llc | Bi-modal linear and loop ablation catheter, and method |
| US8747351B2 (en) * | 2009-08-28 | 2014-06-10 | Biosense Webster, Inc. | Catheter with multi-functional control handle having linear mechanism |
| US9861438B2 (en) * | 2009-12-11 | 2018-01-09 | Biosense Webster (Israel), Ltd. | Pre-formed curved ablation catheter |
| US8608735B2 (en) * | 2009-12-30 | 2013-12-17 | Biosense Webster (Israel) Ltd. | Catheter with arcuate end section |
| US8226580B2 (en) * | 2010-06-30 | 2012-07-24 | Biosense Webster (Israel), Ltd. | Pressure sensing for a multi-arm catheter |
| US8961533B2 (en) | 2010-09-17 | 2015-02-24 | Hansen Medical, Inc. | Anti-buckling mechanisms and methods |
| WO2012051433A2 (en) | 2010-10-13 | 2012-04-19 | Angiodynamics, Inc. | System and method for electrically ablating tissue of a patient |
| MX2013004241A (es) | 2010-10-25 | 2013-05-30 | Medtronic Ardian Luxembourg | Aparatos de cateter que tienen arreglos de multiples electrodos para neuromodulacion renal y sistemas y metodos asociados. |
| US9572508B2 (en) | 2010-11-09 | 2017-02-21 | St. Jude Medical, Atrial Fibrillation Division, Inc. | In-plane dual loop fixed diameter electrophysiology catheters and methods of manufacturing therefor |
| US11246653B2 (en) * | 2010-12-07 | 2022-02-15 | Boaz Avitall | Catheter systems for cardiac arrhythmia ablation |
| JP6297971B2 (ja) | 2011-04-12 | 2018-03-20 | サーメディカル・インコーポレイテッド | アブレーション療法の制御方法および器具 |
| US8880147B2 (en) * | 2011-05-02 | 2014-11-04 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Sensor assembly tethered within catheter wall |
| US9220433B2 (en) * | 2011-06-30 | 2015-12-29 | Biosense Webster (Israel), Ltd. | Catheter with variable arcuate distal section |
| US10743932B2 (en) * | 2011-07-28 | 2020-08-18 | Biosense Webster (Israel) Ltd. | Integrated ablation system using catheter with multiple irrigation lumens |
| US20130030363A1 (en) | 2011-07-29 | 2013-01-31 | Hansen Medical, Inc. | Systems and methods utilizing shape sensing fibers |
| US9662169B2 (en) | 2011-07-30 | 2017-05-30 | Biosense Webster (Israel) Ltd. | Catheter with flow balancing valve |
| US9078665B2 (en) | 2011-09-28 | 2015-07-14 | Angiodynamics, Inc. | Multiple treatment zone ablation probe |
| US10064678B2 (en) * | 2011-10-26 | 2018-09-04 | Medtronic Ablation Frontiers Llc | Semi-circular pulmonary vein ablation catheter |
| FR2982758B1 (fr) | 2011-11-21 | 2013-11-15 | Impeto Medical | Procede d'analyse physiologique de fiabilite accrue |
| KR102067583B1 (ko) | 2011-12-09 | 2020-01-17 | 메타벤션, 인크. | 간 시스템의 치료적 신경조절 |
| US20140135745A1 (en) | 2011-12-15 | 2014-05-15 | Imricor Medical Systems, Inc. | Mri compatible handle and steerable sheath |
| US9757538B2 (en) | 2011-12-15 | 2017-09-12 | Imricor Medical Systems, Inc. | MRI compatible control handle for steerable sheath with audible, tactile and/or visual means |
| US9821143B2 (en) | 2011-12-15 | 2017-11-21 | Imricor Medical Systems, Inc. | Steerable sheath including elastomeric member |
| US9687289B2 (en) | 2012-01-04 | 2017-06-27 | Biosense Webster (Israel) Ltd. | Contact assessment based on phase measurement |
| US9414881B2 (en) | 2012-02-08 | 2016-08-16 | Angiodynamics, Inc. | System and method for increasing a target zone for electrical ablation |
| US20130296729A1 (en) * | 2012-05-04 | 2013-11-07 | Biosense Webster (Israel), Ltd. | Catheter having two-piece connector for a split handle assembly |
| US9717555B2 (en) * | 2012-05-14 | 2017-08-01 | Biosense Webster (Israel), Ltd. | Catheter with helical end section for vessel ablation |
| US9439722B2 (en) | 2012-05-09 | 2016-09-13 | Biosense Webster (Israel) Ltd. | Ablation targeting nerves in or near the inferior vena cava and/or abdominal aorta for treatment of hypertension |
| US8888773B2 (en) | 2012-05-11 | 2014-11-18 | Medtronic Ardian Luxembourg S.A.R.L. | Multi-electrode catheter assemblies for renal neuromodulation and associated systems and methods |
| US10342608B2 (en) * | 2012-10-18 | 2019-07-09 | The Board Of Trustees Of The Leland Stanford Junior University | Ablation catheter system and method for deploying same |
| US11241267B2 (en) | 2012-11-13 | 2022-02-08 | Pulnovo Medical (Wuxi) Co., Ltd | Multi-pole synchronous pulmonary artery radiofrequency ablation catheter |
| US9827036B2 (en) | 2012-11-13 | 2017-11-28 | Pulnovo Medical (Wuxi) Co., Ltd. | Multi-pole synchronous pulmonary artery radiofrequency ablation catheter |
| US12082868B2 (en) | 2012-11-13 | 2024-09-10 | Pulnovo Medical (Wuxi) Co., Ltd. | Multi-pole synchronous pulmonary artery radiofrequency ablation catheter |
| CN102908191A (zh) * | 2012-11-13 | 2013-02-06 | 陈绍良 | 多极同步肺动脉射频消融导管 |
| US9095321B2 (en) | 2012-11-21 | 2015-08-04 | Medtronic Ardian Luxembourg S.A.R.L. | Cryotherapeutic devices having integral multi-helical balloons and methods of making the same |
| US8894610B2 (en) | 2012-11-28 | 2014-11-25 | Hansen Medical, Inc. | Catheter having unirail pullwire architecture |
| US20140148673A1 (en) | 2012-11-28 | 2014-05-29 | Hansen Medical, Inc. | Method of anchoring pullwire directly articulatable region in catheter |
| US10080576B2 (en) | 2013-03-08 | 2018-09-25 | Auris Health, Inc. | Method, apparatus, and a system for facilitating bending of an instrument in a surgical or medical robotic environment |
| US10149720B2 (en) | 2013-03-08 | 2018-12-11 | Auris Health, Inc. | Method, apparatus, and a system for facilitating bending of an instrument in a surgical or medical robotic environment |
| US10376672B2 (en) | 2013-03-15 | 2019-08-13 | Auris Health, Inc. | Catheter insertion system and method of fabrication |
| US9179974B2 (en) | 2013-03-15 | 2015-11-10 | Medtronic Ardian Luxembourg S.A.R.L. | Helical push wire electrode |
| US20160128767A1 (en) | 2013-06-05 | 2016-05-12 | Metavention, Inc. | Modulation of targeted nerve fibers |
| US20150073515A1 (en) | 2013-09-09 | 2015-03-12 | Medtronic Ardian Luxembourg S.a.r.I. | Neuromodulation Catheter Devices and Systems Having Energy Delivering Thermocouple Assemblies and Associated Methods |
| US9763741B2 (en) | 2013-10-24 | 2017-09-19 | Auris Surgical Robotics, Inc. | System for robotic-assisted endolumenal surgery and related methods |
| US10105073B2 (en) * | 2013-11-21 | 2018-10-23 | Biosense Webster (Israel) Ltd | Flexible multiple-arm diagnostic catheter |
| US11096736B2 (en) * | 2013-12-09 | 2021-08-24 | Biosense Webster (Israel) Ltd. | Pericardial catheter with temperature sensing array |
| JP6294495B2 (ja) | 2014-01-23 | 2018-03-14 | セント・ジュード・メディカル,カーディオロジー・ディヴィジョン,インコーポレイテッド | 高強度の接合継手を含む医療装置およびその製造方法 |
| CN103784181A (zh) * | 2014-03-06 | 2014-05-14 | 山东威高集团医用高分子制品股份有限公司 | 一次性使用单极探针 |
| WO2015164280A1 (en) | 2014-04-24 | 2015-10-29 | Medtronic Ardian Luxembourg S.A.R.L. | Neuromodulation catheters having braided shafts and associated systems and methods |
| KR101672879B1 (ko) * | 2014-04-29 | 2016-11-07 | 재단법인 아산사회복지재단 | 카테터 어셈블리 |
| CN104068930A (zh) * | 2014-06-04 | 2014-10-01 | 远见企业有限公司 | 一种具有预先弯折管体的去肾动脉交感神经消融导管 |
| US10194978B2 (en) * | 2014-06-13 | 2019-02-05 | Medtronic Cryocath Lp | Supporting catheter for use for phrenic nerve pacing |
| US9561083B2 (en) | 2014-07-01 | 2017-02-07 | Auris Surgical Robotics, Inc. | Articulating flexible endoscopic tool with roll capabilities |
| US10792464B2 (en) | 2014-07-01 | 2020-10-06 | Auris Health, Inc. | Tool and method for using surgical endoscope with spiral lumens |
| US9744335B2 (en) | 2014-07-01 | 2017-08-29 | Auris Surgical Robotics, Inc. | Apparatuses and methods for monitoring tendons of steerable catheters |
| JP6608924B2 (ja) * | 2014-07-11 | 2019-11-20 | プルノヴォ メディカル (ウーシー) カンパニー リミテッド | 多極同時肺動脈高周波アブレーションカテーテル |
| US12114911B2 (en) | 2014-08-28 | 2024-10-15 | Angiodynamics, Inc. | System and method for ablating a tissue site by electroporation with real-time pulse monitoring |
| US20160113711A1 (en) * | 2014-10-22 | 2016-04-28 | Oscor Inc. | Ablation catheter and method of forming a circular lesion |
| US9788893B2 (en) * | 2014-11-20 | 2017-10-17 | Biosense Webster (Israel) Ltd. | Catheter with soft distal tip for mapping and ablating tubular region |
| US11628009B2 (en) * | 2014-12-17 | 2023-04-18 | Biosense Webster (Israel) Ltd. | EP catheter with trained support member, and related methods |
| US10271899B2 (en) | 2015-03-18 | 2019-04-30 | Medtronic Cryocath Lp | Multi-function device with treatment and sensing capabilities |
| US11819636B2 (en) | 2015-03-30 | 2023-11-21 | Auris Health, Inc. | Endoscope pull wire electrical circuit |
| JP6113780B2 (ja) * | 2015-05-07 | 2017-04-12 | イューエムセー ユトレヒト ホールディング ベースローテン フェンノートシャップ | アブレーションカテーテル及び心臓組織を電気的に絶縁するための方法 |
| US10687890B2 (en) * | 2015-10-13 | 2020-06-23 | Biosense Webster (Israel) Ltd. | Lasso catheter with moveable ablation spine |
| US10751123B2 (en) * | 2015-10-30 | 2020-08-25 | Washington University | Thermoablation probe |
| US11850369B2 (en) * | 2016-04-08 | 2023-12-26 | St. Jude Medical, Cardiology Division, Inc. | Mapping variable loop catheter handle |
| US10524859B2 (en) | 2016-06-07 | 2020-01-07 | Metavention, Inc. | Therapeutic tissue modulation devices and methods |
| US10912475B2 (en) * | 2016-08-24 | 2021-02-09 | Biosense Webster (Israel) Ltd | Catheter with split electrode sleeve and related methods |
| US10463439B2 (en) | 2016-08-26 | 2019-11-05 | Auris Health, Inc. | Steerable catheter with shaft load distributions |
| US10905492B2 (en) | 2016-11-17 | 2021-02-02 | Angiodynamics, Inc. | Techniques for irreversible electroporation using a single-pole tine-style internal device communicating with an external surface electrode |
| US11717337B2 (en) * | 2016-11-29 | 2023-08-08 | St. Jude Medical, Cardiology Division, Inc. | Electroporation systems and catheters for electroporation systems |
| KR102576296B1 (ko) | 2017-05-17 | 2023-09-08 | 아우리스 헬스, 인코포레이티드 | 교환 가능한 작업 채널 |
| US11998264B2 (en) * | 2017-08-18 | 2024-06-04 | St. Jude Medical, Cardiology Division, Inc. | Medical catheters, systems including medical catheters, and methods of positioning medical catheters |
| EP3476344B1 (en) * | 2017-10-05 | 2020-03-25 | Heraeus Deutschland GmbH & Co. KG | Catheter system |
| US20190199078A1 (en) * | 2017-12-27 | 2019-06-27 | Biosense Webster (Israel) Ltd. | Providing Strain Relief in Electrical Cable Assemblies |
| EP3769708B1 (en) * | 2018-03-20 | 2022-07-27 | TERUMO Kabushiki Kaisha | Medical device |
| CN110831480B (zh) | 2018-03-28 | 2023-08-29 | 奥瑞斯健康公司 | 具有可变弯曲刚度分布曲线的医疗器械 |
| US11083871B2 (en) | 2018-05-03 | 2021-08-10 | Thermedical, Inc. | Selectively deployable catheter ablation devices |
| US11918277B2 (en) | 2018-07-16 | 2024-03-05 | Thermedical, Inc. | Inferred maximum temperature monitoring for irrigated ablation therapy |
| KR20230169481A (ko) | 2018-08-07 | 2023-12-15 | 아우리스 헬스, 인코포레이티드 | 카테터 제어와의 변형-기반 형상 감지의 조합 |
| CN112804933B (zh) | 2018-09-26 | 2024-10-18 | 奥瑞斯健康公司 | 关节运动式医疗器械 |
| US11357451B2 (en) * | 2018-12-10 | 2022-06-14 | Oscor Inc. | Intravascular mapping catheter with irrigated basket assembly |
| CN113286543A (zh) | 2018-12-28 | 2021-08-20 | 奥瑞斯健康公司 | 具有可关节运动区段的医疗器械 |
| US11617627B2 (en) | 2019-03-29 | 2023-04-04 | Auris Health, Inc. | Systems and methods for optical strain sensing in medical instruments |
| US12004878B2 (en) * | 2019-07-03 | 2024-06-11 | Biosense Webster (Israel) Ltd. | Composite catheter with single axial sensors and ring electrodes and related methods |
| US11963685B2 (en) * | 2019-07-09 | 2024-04-23 | Cilag Gmbh International | Esophagus sizing instrument |
| KR20220050151A (ko) | 2019-08-15 | 2022-04-22 | 아우리스 헬스, 인코포레이티드 | 다수의 굽힘 섹션을 갖는 의료 장치 |
| EP3998976B1 (en) * | 2019-10-31 | 2024-03-27 | St. Jude Medical, Cardiology Division, Inc. | Catheter including deflectable shaft and methods of assembling same |
| WO2021137104A1 (en) | 2019-12-31 | 2021-07-08 | Auris Health, Inc. | Dynamic pulley system |
| US20220087739A1 (en) * | 2020-09-18 | 2022-03-24 | Acclarent, Inc. | Ent instrument with expandable ablation feature |
| US20220095947A1 (en) * | 2020-09-29 | 2022-03-31 | Biosense Webster (Israel) Ltd. | Circular navigation catheter with surface mounted inductive navigation sensors |
Family Cites Families (68)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5449343A (en) * | 1985-07-30 | 1995-09-12 | Advanced Cardiovascular Systems, Inc. | Steerable dilatation catheter |
| US5242394A (en) * | 1985-07-30 | 1993-09-07 | Advanced Cardiovascular Systems, Inc. | Steerable dilatation catheter |
| DE3819372C1 (en) * | 1988-06-07 | 1990-01-04 | Andreas Dr. 7800 Freiburg De Zeiher | Guide catheter |
| US4998923A (en) * | 1988-08-11 | 1991-03-12 | Advanced Cardiovascular Systems, Inc. | Steerable dilatation catheter |
| SE462948B (sv) * | 1988-12-06 | 1990-09-24 | Moelnlycke Ab | Absorptionskropp uppvisande mot mittpartiet kontinuerligt oekande komprineringsgrad samt saett foer dess framstaellning |
| US5358478A (en) * | 1990-02-02 | 1994-10-25 | Ep Technologies, Inc. | Catheter steering assembly providing asymmetric left and right curve configurations |
| US5195968A (en) * | 1990-02-02 | 1993-03-23 | Ingemar Lundquist | Catheter steering mechanism |
| US5820591A (en) * | 1990-02-02 | 1998-10-13 | E. P. Technologies, Inc. | Assemblies for creating compound curves in distal catheter regions |
| AU660444B2 (en) * | 1991-02-15 | 1995-06-29 | Ingemar H. Lundquist | Torquable catheter and method |
| US5329923A (en) * | 1991-02-15 | 1994-07-19 | Lundquist Ingemar H | Torquable catheter |
| US5354297A (en) * | 1992-02-14 | 1994-10-11 | Boaz Avitall | Biplanar deflectable catheter for arrhythmogenic tissue ablation |
| US5327905A (en) * | 1992-02-14 | 1994-07-12 | Boaz Avitall | Biplanar deflectable catheter for arrhythmogenic tissue ablation |
| JPH05265684A (ja) | 1992-03-18 | 1993-10-15 | Fujitsu Ltd | ウインドウ・ポップアップ制御方法 |
| US5383852A (en) | 1992-12-04 | 1995-01-24 | C. R. Bard, Inc. | Catheter with independent proximal and distal control |
| US5462527A (en) | 1993-06-29 | 1995-10-31 | C.R. Bard, Inc. | Actuator for use with steerable catheter |
| JP2688115B2 (ja) * | 1993-04-28 | 1997-12-08 | コーディス ウェブスター,インコーポレイティド | プレカーブ型の先端を有する電気生理学的カテーテル |
| US5611777A (en) | 1993-05-14 | 1997-03-18 | C.R. Bard, Inc. | Steerable electrode catheter |
| US5334168A (en) * | 1993-06-11 | 1994-08-02 | Catheter Research, Inc. | Variable shape guide apparatus |
| US5571088A (en) * | 1993-07-01 | 1996-11-05 | Boston Scientific Corporation | Ablation catheters |
| US5545200A (en) * | 1993-07-20 | 1996-08-13 | Medtronic Cardiorhythm | Steerable electrophysiology catheter |
| US5391199A (en) | 1993-07-20 | 1995-02-21 | Biosense, Inc. | Apparatus and method for treating cardiac arrhythmias |
| US5928191A (en) * | 1993-07-30 | 1999-07-27 | E.P. Technologies, Inc. | Variable curve electrophysiology catheter |
| US5643231A (en) * | 1993-08-13 | 1997-07-01 | Daig Corporation | Coronary sinus catheter |
| US5562619A (en) * | 1993-08-19 | 1996-10-08 | Boston Scientific Corporation | Deflectable catheter |
| US6001093A (en) | 1993-10-15 | 1999-12-14 | Ep Technologies, Inc. | Systems and methods for creating long, thin lesions in body tissue |
| US5437282A (en) * | 1993-10-29 | 1995-08-01 | Boston Scientific Corporation | Drive shaft for acoustic imaging catheters and flexible catheters |
| EP1364677A3 (en) * | 1993-11-10 | 2006-12-27 | Medtronic, Inc. | Electrode array catheter |
| US6099524A (en) * | 1994-01-28 | 2000-08-08 | Cardiac Pacemakers, Inc. | Electrophysiological mapping and ablation catheter and method |
| US5680860A (en) * | 1994-07-07 | 1997-10-28 | Cardiac Pathways Corporation | Mapping and/or ablation catheter with coilable distal extremity and method for using same |
| US5836947A (en) * | 1994-10-07 | 1998-11-17 | Ep Technologies, Inc. | Flexible structures having movable splines for supporting electrode elements |
| US5830214A (en) * | 1994-11-08 | 1998-11-03 | Heartport, Inc. | Fluid-evacuating electrosurgical device |
| US5916178A (en) * | 1995-03-30 | 1999-06-29 | Medtronic, Inc. | Steerable high support guidewire with thin wall nitinol tube |
| US5596996A (en) * | 1995-03-30 | 1997-01-28 | Medtronic, Inc. | High support nitinol tube guidewire with plastic plug transition |
| WO1996041654A1 (en) * | 1995-06-12 | 1996-12-27 | Cordis Webster, Inc. | Catheter with an electromagnetic guidance sensor |
| US5697377A (en) | 1995-11-22 | 1997-12-16 | Medtronic, Inc. | Catheter mapping system and method |
| US5755760A (en) * | 1996-03-11 | 1998-05-26 | Medtronic, Inc. | Deflectable catheter |
| GB9609866D0 (en) * | 1996-05-11 | 1996-07-17 | Morgan John M | Ablation catheter |
| US6068623A (en) * | 1997-03-06 | 2000-05-30 | Percusurge, Inc. | Hollow medical wires and methods of constructing same |
| US5810887A (en) * | 1996-08-23 | 1998-09-22 | Rhythm Technologies, Inc. | Temporary catheter |
| US6278563B1 (en) * | 1996-10-15 | 2001-08-21 | Light & Sound Design, Ltd. | Scrolling color changer |
| US5820568A (en) | 1996-10-15 | 1998-10-13 | Cardiac Pathways Corporation | Apparatus and method for aiding in the positioning of a catheter |
| US5779669A (en) * | 1996-10-28 | 1998-07-14 | C. R. Bard, Inc. | Steerable catheter with fixed curve |
| US6096036A (en) * | 1998-05-05 | 2000-08-01 | Cardiac Pacemakers, Inc. | Steerable catheter with preformed distal shape and method for use |
| JP3469420B2 (ja) | 1996-12-20 | 2003-11-25 | 東京エレクトロン株式会社 | Cvd成膜方法 |
| KR100255207B1 (ko) | 1997-01-28 | 2000-05-01 | 윤종용 | 하드 디스크 드라이브의 안정된 언래치 제어 방법 |
| US5876373A (en) * | 1997-04-04 | 1999-03-02 | Eclipse Surgical Technologies, Inc. | Steerable catheter |
| US5782900A (en) * | 1997-06-23 | 1998-07-21 | Irvine Biomedical, Inc. | Catheter system having safety means |
| US5938588A (en) * | 1997-06-25 | 1999-08-17 | Circon Corporation | Superelastic control wire sheath for flexible endoscope |
| US6308090B1 (en) * | 1998-03-09 | 2001-10-23 | Irvine Biomedical, Inc. | Devices and methods for coronary sinus mapping |
| US6592581B2 (en) * | 1998-05-05 | 2003-07-15 | Cardiac Pacemakers, Inc. | Preformed steerable catheter with movable outer sleeve and method for use |
| US6241727B1 (en) * | 1998-05-27 | 2001-06-05 | Irvine Biomedical, Inc. | Ablation catheter system having circular lesion capabilities |
| US6178354B1 (en) * | 1998-12-02 | 2001-01-23 | C. R. Bard, Inc. | Internal mechanism for displacing a slidable electrode |
| US6325797B1 (en) * | 1999-04-05 | 2001-12-04 | Medtronic, Inc. | Ablation catheter and method for isolating a pulmonary vein |
| US6461356B1 (en) | 1999-07-01 | 2002-10-08 | C.R. Bard, Inc. | Medical device having an incrementally displaceable electrode |
| US6254568B1 (en) * | 1999-08-10 | 2001-07-03 | Biosense Webster, Inc. | Deflectable catheter with straightening element |
| US6315778B1 (en) * | 1999-09-10 | 2001-11-13 | C. R. Bard, Inc. | Apparatus for creating a continuous annular lesion |
| US6607520B2 (en) * | 1999-09-15 | 2003-08-19 | The General Hospital Corporation | Coiled ablation catheter system |
| EP2712567A1 (en) * | 1999-11-22 | 2014-04-02 | Boston Scientific Limited | Loop structures for supporting diagnostic and therapeutic elements in contact with body tissue |
| US6795721B2 (en) * | 2000-01-27 | 2004-09-21 | Biosense Webster, Inc. | Bidirectional catheter having mapping assembly |
| US6628976B1 (en) * | 2000-01-27 | 2003-09-30 | Biosense Webster, Inc. | Catheter having mapping assembly |
| US20010025134A1 (en) * | 2000-03-15 | 2001-09-27 | Edwin Bon | Catheter tip with bridged steering wire sleeve element |
| US6685720B1 (en) | 2000-10-16 | 2004-02-03 | Interventional Technologies | Catheter having improved shaped retention |
| US6728563B2 (en) * | 2000-11-29 | 2004-04-27 | St. Jude Medical, Daig Division, Inc. | Electrophysiology/ablation catheter having “halo” configuration |
| EP1383567B1 (en) | 2001-04-27 | 2007-11-28 | C.R. Bard, Inc. | Electrophysiology catheter for mapping and/or ablation |
| WO2002094334A1 (en) * | 2001-05-21 | 2002-11-28 | Medtronic, Inc. | Malleable elongated medical device |
| US6771996B2 (en) * | 2001-05-24 | 2004-08-03 | Cardiac Pacemakers, Inc. | Ablation and high-resolution mapping catheter system for pulmonary vein foci elimination |
| US6616628B2 (en) * | 2001-11-16 | 2003-09-09 | Cardiac Pacemakers, Inc. | Steerable catheter with a longitudinally adjustable curved core |
| US6913594B2 (en) * | 2001-12-31 | 2005-07-05 | Biosense Webster, Inc. | Dual-function catheter handle |
-
2003
- 2003-10-31 US US10/533,596 patent/US20060241366A1/en not_active Abandoned
- 2003-10-31 EP EP16157659.0A patent/EP3097882A1/en not_active Withdrawn
- 2003-10-31 WO PCT/US2003/034828 patent/WO2004039273A2/en active Application Filing
- 2003-10-31 EP EP03781676.6A patent/EP1565118B1/en not_active Expired - Lifetime
- 2003-10-31 JP JP2004548623A patent/JP5328074B2/ja not_active Expired - Fee Related
-
2012
- 2012-11-05 US US13/668,618 patent/US8961509B2/en not_active Expired - Fee Related
-
2015
- 2015-02-19 US US14/625,900 patent/US20150157401A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| EP1565118A2 (en) | 2005-08-24 |
| EP1565118B1 (en) | 2016-03-09 |
| EP3097882A1 (en) | 2016-11-30 |
| JP2006504473A (ja) | 2006-02-09 |
| WO2004039273A2 (en) | 2004-05-13 |
| US8961509B2 (en) | 2015-02-24 |
| US20130165922A1 (en) | 2013-06-27 |
| US20150157401A1 (en) | 2015-06-11 |
| US20060241366A1 (en) | 2006-10-26 |
| WO2004039273A3 (en) | 2004-10-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5328074B2 (ja) | 改善された電気生理学的カテーテル | |
| US9750567B2 (en) | Electrophysiology catheter for mapping and/or ablation | |
| JP4855482B2 (ja) | 心臓組織を剥離する方法及び装置 | |
| CN105615993B (zh) | 具有用于标测和消融管状区域的软的远侧末端的导管 | |
| JP4728224B2 (ja) | 改善された電気生理学的ループカテーテル | |
| US8682410B2 (en) | Multi-array monophasic action potential medical device | |
| JP2019213970A (ja) | 専用流体経路及び針中心合わせインサートを有するアブレーションカテーテル | |
| US20080058794A1 (en) | Electrophysiology System for Mapping and Ablating Arrhythmias | |
| JP6890946B2 (ja) | 可動性のアブレーション針を備えるラッソーカテーテル | |
| JP2017170142A (ja) | カテーテルチップデザインのための分散型灌注形状 | |
| US11426235B2 (en) | Electrode loop assembly including shaped support tube and method of assembling same | |
| EP1905376B1 (en) | Braided mesh catheter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061031 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091005 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20100105 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20100113 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20100204 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20100212 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100402 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100813 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20101111 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20101118 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20101209 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20101216 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110210 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110517 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110920 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20110929 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20111028 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120607 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120612 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130227 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130304 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130430 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130507 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130531 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130723 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5328074 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |