JP5320673B2 - アクチュエータ、光スキャナおよび画像形成装置 - Google Patents
アクチュエータ、光スキャナおよび画像形成装置 Download PDFInfo
- Publication number
- JP5320673B2 JP5320673B2 JP2007007512A JP2007007512A JP5320673B2 JP 5320673 B2 JP5320673 B2 JP 5320673B2 JP 2007007512 A JP2007007512 A JP 2007007512A JP 2007007512 A JP2007007512 A JP 2007007512A JP 5320673 B2 JP5320673 B2 JP 5320673B2
- Authority
- JP
- Japan
- Prior art keywords
- movable plate
- voltage
- piezoelectric element
- pair
- electromotive force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Laser Beam Printer (AREA)
- Mechanical Optical Scanning Systems (AREA)
- Micromachines (AREA)
- Facsimile Scanning Arrangements (AREA)
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Description
特許文献1には、反射ミラーと、反射ミラーを支持するための固定枠部と、反射ミラーを固定枠部に対して回動可能に連結する1対のバネ部とを備えるアクチュエータが開示されている。そして、このような各バネ部は、途中で2本に分岐した構造をなしている。具体的には、各バネ部は、連結体と、反射ミラーと連結体とを連結する第1のバネ部と、固定枠部と連結体とを連結する第2のバネ部を有している。さらに、第2のバネ部は、反射ミラーの回動中心軸に対して、互いに対向するように設けられた1対の弾性体で構成されている。
本発明のアクチュエータは、可動板と、
前記可動板を支持するための支持部と、
前記可動板を前記支持部に対して回動可能とするように、前記可動板と前記支持部とを連結する連結部とを有し、
前記各連結部は、前記可動板の回動中心軸を介して互いに対向するように設けられた長手形状をなす1対の弾性部材を備え、前記1対の弾性部材を互いに反対方向へ曲げ変形させて前記可動板を回動させるように構成されたアクチュエータであって、
前記1対の弾性部材のそれぞれに対応するように設けられた1対の圧電素子と、
前記1対の圧電素子に電圧を交互にかつ周期的に印加する電圧印加手段と、
前記各圧電素子の前記電圧が印加されていない状態での変形により生じる起電力に基づいて前記可動板の挙動を検知する挙動検知手段とを有していることを特徴とする。
これにより、小型化および省電力化を図りつつ、前記1対の圧電素子を用いて前記可動板の挙動検知と回動駆動とを効率的に行うことのできるアクチュエータを提供することができる。
これにより、簡単な構成で前記可動板の挙動を検知することができる。
これにより、前記起電力検出部によって、前記1対の圧電素子のうちのいずれかの圧電素子の変形により生じる起電力をアクチュエータの駆動時間の全域にわたって検出することができる。そのため、極めて正確に前記可動板の挙動を検知することができる。
これにより、簡単な構成で所望の電圧を前記1対の圧電素子に印加することができる。
本発明のアクチュエータでは、前記ドライバは、前記1対の圧電素子のうちの一方の圧電素子への電圧印加の終了時と他方の圧電素子への電圧印加の開始時との間、および、前記他方の圧電素子への電圧印加の終了時と前記一方の圧電素子への電圧印加の開始時との間に、所定の時間間隔を設けて、前記1対の圧電素子に交互に電圧を印加することが好ましい。
これにより、省電力化を図りつつ、円滑に前記可動板を回動させることができる。
これにより、前記挙動検知手段の検知結果に基づいて前記電圧印加手段を作動させることができるため、前記可動板の挙動を所望のものとすることができる。すなわち所望の振動特性を発揮することのできるアクチュエータを提供することができる。
本発明のアクチュエータでは、前記圧電素子は、前記各弾性部材に接触するように設けられ、前記可動板の厚さ方向へ伸縮することにより、前記各弾性部材を前記曲げ変形させることが好ましい。
本発明のアクチュエータでは、前記可動板は、その板面に、光反射性を有する光反射部を備えていることが好ましい。
これにより、アクチュエータを光スキャナ等の光学デバイスに用いることができる。
本発明のアクチュエータは、光を反射する平面部を備える光反射部と、
前記光反射部を支持する第1の軸部材および第2の軸部材と、
前記第1の軸部材に接続される第1の駆動部材と、
前記第1の駆動部材に接続される第1の弾性部材および第2の弾性部材と、
前記第2の軸部材に接続される第2の駆動部材と、
前記第2の駆動部材に接続される第3の弾性部材および第4の弾性部材と、
前記第1の弾性部材、前記第2の弾性部材、前記第3の弾性部材および前記第4の弾性部材にそれぞれ1つずつ設けられた複数の圧電素子と、
前記複数の圧電素子にそれぞれ1つずつ接続される複数のスイッチ素子と、
前記複数のスイッチ素子のそれぞれに1つずつ接続され、かつ対応する前記圧電素子の起電力を検出する複数の起電力検出部と、
前記複数の圧電素子のそれぞれと前記複数のスイッチ素子のそれぞれとの動作を制御する制御部と、を有し、
前記複数の圧電素子のそれぞれに対して電圧が印加されることにより、前記光反射部が前記第1の軸部材および前記第2の軸部材に対して回動することを特徴とする。
本発明のアクチュエータでは、前記複数の圧電素子は、前記第1の弾性部材に設けられた第1の圧電素子と、前記第2の弾性部材に設けられた第2の圧電素子と、前記第3の弾性部材に設けられた第3の圧電素子と、前記第4の弾性部材に設けられた第4の圧電素子とを有し、
前記制御部は、
前記第1の圧電素子と前記第2の圧電素子とに対して交互に電圧を印加し、
前記第1の圧電素子に接続されたスイッチ素子と前記第2の圧電素子に接続されたスイッチ素子とのON/OFF状態を交互に切り換え、
前記第3の圧電素子と前記第4の圧電素子とに対して交互に電圧を印加し、
前記第3の圧電素子に接続されたスイッチ素子と前記第4の圧電素子に接続されたスイッチ素子とのON/OFF状態を交互に切り換え、
前記ON状態とは、前記圧電素子に生じる起電力が前記起電力検出部へ入力される状態であり、
前記OFF状態とは、前記圧電素子に生じる起電力の前記起電力検出部への入力が遮断される状態であることが好ましい。
前記可動板を支持するための支持部と、
前記可動板を前記支持部に対して回動可能とするように、前記可動板と前記支持部とを連結する連結部とを有し、
前記各連結部は、前記可動板の回動中心軸を介して互いに対向するように設けられた長手形状をなす1対の弾性部材を備え、前記1対の弾性部材を互いに反対方向へ曲げ変形させて前記可動板を回動させ、前記光反射部で反射した光を走査するように構成された光スキャナであって、
前記1対の弾性部材のそれぞれに対応するように設けられた1対の圧電素子と、
前記1対の圧電素子に電圧を交互にかつ周期的に印加する電圧印加手段と、
前記各圧電素子の前記電圧が印加されていない状態での変形により生じる起電力に基づいて前記可動板の挙動を検知する挙動検知手段とを有していることを特徴とする。
これにより、小型化および省電力化を図りつつ、前記1対の圧電素子を用いて前記可動板の挙動検知と回動駆動とを効率的に行うことのできる光スキャナを提供することができる。
本発明の光スキャナは、光を反射する平面部を備える光反射部と、
前記光反射部を支持する第1の軸部材および第2の軸部材と、
前記第1の軸部材に接続される第1の駆動部材と、
前記第1の駆動部材に接続される第1の弾性部材および第2の弾性部材と、
前記第2の軸部材に接続される第2の駆動部材と、
前記第2の駆動部材に接続される第3の弾性部材および第4の弾性部材と、
前記第1の弾性部材、前記第2の弾性部材、前記第3の弾性部材および前記第4の弾性部材にそれぞれ1つずつ設けられた複数の圧電素子と、
前記複数の圧電素子にそれぞれ1つずつ接続される複数のスイッチ素子と、
前記複数のスイッチ素子のそれぞれに1つずつ接続され、かつ対応する前記圧電素子の起電力を検出する複数の起電力検出部と、
前記複数の圧電素子のそれぞれと前記複数のスイッチ素子のそれぞれとの動作を制御する制御部と、を有し、
前記複数の圧電素子のそれぞれに対して電圧が印加されることにより前記光反射部が前記第1の軸部材および前記第2の軸部材に対して回動し、前記平面部に入射した光を走査することを特徴とする。
前記可動板を支持するための支持部と、
前記可動板を前記支持部に対して回動可能とするように、前記可動板と前記支持部とを連結する連結部とを有し、
前記各連結部は、前記可動板の回動中心軸を介して互いに対向するように設けられた長手形状をなす1対の弾性部材を備え、前記1対の弾性部材を互いに反対方向へ曲げ変形させて前記可動板を回動させ、前記光反射部で反射した光を走査し、対象物に画像を形成するように構成されている光スキャナを備えた画像形成装置であって、
前記1対の弾性部材のそれぞれに対応するように設けられた1対の圧電素子と、
前記1対の圧電素子に電圧を交互にかつ周期的に印加する電圧印加手段と、
前記各圧電素子の前記電圧が印加されていない状態での変形により生じる起電力に基づいて前記可動板の挙動を検知する挙動検知手段とを有していることを特徴とする。
これにより、小型化および省電力化を図りつつ、前記1対の圧電素子を用いて前記可動板の挙動検知と回動駆動とを効率的に行うことのできる光スキャナを備えているため、優れた描画特性を発揮することのできる画像形成装置を提供することができる。
本発明の画像形成装置は、光源と、
前記光源からの光を走査する光スキャナと、を備え、
前記光スキャナは、
前記光を反射する平面部を備える光反射部と、
前記光反射部を支持する第1の軸部材および第2の軸部材と、
前記第1の軸部材に接続される第1の駆動部材と、
前記第1の駆動部材に接続される第1の弾性部材および第2の弾性部材と、
前記第2の軸部材に接続される第2の駆動部材と、
前記第2の駆動部材に接続される第3の弾性部材および第4の弾性部材と、
前記第1の弾性部材、前記第2の弾性部材、前記第3の弾性部材および前記第4の弾性部材にそれぞれ1つずつ設けられた複数の圧電素子と、
前記複数の圧電素子にそれぞれ1つずつ接続される複数のスイッチ素子と、
前記複数のスイッチ素子のそれぞれに1つずつ接続され、かつ対応する前記圧電素子の起電力を検出する複数の起電力検出部と、
前記複数の圧電素子のそれぞれと前記複数のスイッチ素子のそれぞれとの動作を制御する制御部と、を有し、
前記複数の圧電素子のそれぞれに対して電圧が印加されることにより前記光反射部が前記第1の軸部材および前記第2の軸部材に対して回動することを特徴とする。
<第1実施形態>
まず、本発明のアクチュエータの第1実施形態を説明する。
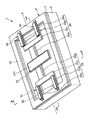
図1は、本発明のアクチュエータの第1実施形態を示す斜視図、図2は、図1中A−A線断面図、図3は、図1に示すアクチュエータの駆動および挙動検知を説明するブロック図、図4は、図1に示すアクチュエータの駆動を示すタイミングチャート、図5は、図1中B−B線断面図であり、アクチュエータの回動を説明する図である。
なお、以下では、説明の便宜上、図1中の紙面手前側を「上」、紙面奥側を「下」、右側を「右」、左側を「左」と言い、図2および図5中の上側を「上」、下側を「下」、右側を「右」、左側を「左」と言う。
連結部23は、可動板21と間隔を隔てて設けられた駆動部材(第1の駆動部材)231と、駆動部材231と可動板21とを連結する軸部材(第1の軸部材)232と、駆動部材231と支持部22とを連結する1対の弾性部材(第1の弾性部材および第2の弾性部材)233、234とを備えている。
すなわち、基体2は、可動板21と、軸部材232、242と、駆動部材231、241と、弾性部材233、234、243、244と、支持部22とを有している。以下、これらについて順次説明する。
1対の駆動部材231、241は、可動板の平面視にて、可動板21を中心に左右対称となるように設けられている。また、1対の駆動部材231、241は、互いに同一寸法かつ同一形状をなしており、それぞれ、板状をなしている。ただし、駆動部材231、241の形状などについては、これに限定されず、例えば、棒状をなしていてもよい。また、1対の駆動部材231、241が、互いに同一形状をなしていなくてもよい。
このような駆動部材231は、軸部材232を介して可動板21に連結され、1対の弾性部材233、244を介して支持部22に連結されている。同様に、駆動部材241は、軸部材242を介して可動板21に連結され、1対の弾性部材243、244を介して支持部22に連結されている。
この中でも、1対の弾性部材233、234は、可動板21の平面視にて、回動中心軸Xを介して互いに対向するように、かつ、回動中心軸Xに対して対称的に設けられている。同様に、1対の弾性部材243、244は、可動板21の平面視にて、回動中心軸Xを介して互いに対向するように、かつ、回動中心軸Xに対して対称的に設けられている。
支持部22は、枠状をなし、可動板21の平面視にて、可動板21、軸部材232、242、駆動部材231、241、弾性部材233、234、243、244の外周を囲むように設けられている。ただし、支持部22の形状としては、可動板21を支持することができれば、これに限定されない。
このような支持基板3は、例えば、ガラスやシリコンを主材料として構成されている。そして、支持基板3は、枠状をなし、可動板21の平面視にて、支持部22とほぼ同一形状をなしている。なお、支持基板3の形状については、特に限定されず、例えば、図1でいう左右に分割した形状であってもよいし、枠状をなしておらず、支持基板3の上面に凹部が形成されているようなものであってもよい(すなわち、支持基板3は、その下面で開口していなくてもよい)。また、支持部22の形状などによっては、支持基板3を省略してもよい。
支持基板3と基体2との間に形成された接合層4は、例えば、ガラス、シリコン、またはSiO2を主材料として構成されている。ただし、このような接合層4は、省略してもよい。すなわち、基体2と支持基板3とが直接接合されているものであってよい。
アクチュエータ1は、図3に示すように、圧電素子51〜54に電圧を印加する電圧印加手段6と、圧電素子51〜54の変形により生じる起電力に基づいて可動板21の挙動を検知する挙動検知手段7と、挙動検知手段7の検知結果に基づいて電圧印加手段6の作動を制御する制御部8とを有している。なお、図3中(a)〜(f)のそれぞれは、図4中(a)〜(f)の波形(信号)に対応するものである。
まず、圧電素子51〜54について説明するが、圧電素子51〜54は、互いに同様の構成を有しているため、圧電素子51について代表して説明し、圧電素子52〜54については、その説明を省略する。
このような圧電素子51は、図2に示すように、圧電材料を主材料として構成された圧電体層511と、この圧電体層511を挟持する1対の電極512、513とを有している。
一方、電極513は、圧電体層511の上面の全域を覆うように形成されている。そして、電極513は、例えばワイヤーボンディングで形成された配線を介して、支持部22に設けられた端子(図示せず)に接続されている。
このような圧電素子51は、外力によりその伸縮方向(すなわち、分極方向)へ伸張されることで正電圧と負電圧のうちの一方の電圧(起電力)を発生し、伸縮方向へ収縮されることで正電圧と負電圧のうちの他方の電圧を発生する性質を有している。
ただし、圧電素子51の構成としては、弾性部材233の長手方向に伸縮することができれば、これに限定されない。また、前記端子は、支持部22に形成されていなくてもよいし、省略してもよい。
このような圧電素子51〜54のそれぞれは、電圧印加手段6および挙動検知手段7のそれぞれに接続されている。
ドライバ66は、例えば、図4(a)に示すような電圧を圧電素子51に印加する。すなわち、ドライバ66は、圧電素子51に間欠的にかつ周期的に電圧を印加する。また、ドライバ66による圧電素子51への電圧印加時間は、可動板21の回動周期(すなわち、ドライバ66の電圧印加周期)のほぼ1/4である。
ドライバ67は、例えば、図4(d)に示すような電圧を圧電素子52に印加する。すなわち、ドライバ67は、圧電素子52に間欠的にかつ周期的に電圧を印加する。また、ドライバ67による圧電素子52への電圧印加時間は、可動板21の回動周期(すなわち、ドライバ67の電圧印加周期)のほぼ1/4である。
T1−T2間では、圧電素子51には、電圧が印加されており、圧電素子52には、電圧が印加されていない。したがって、圧電素子51が弾性部材233の長手方向へ伸張し、それに伴い、弾性部材233の長手方向での駆動部材231側の端部が下側へ変位する。すなわち、弾性部材233が下側へ向けて曲げ変形する。
これにより、図5(a)に示すように、駆動部材231が回動中心軸Xまわりに、かつ、図5にて反時計回りに傾斜する。駆動部材231が傾斜することで、軸部材232が捩れ変形し可動板21が回動中心軸Xまわりに、かつ、図5にて反時計回りに傾斜する。
T2−T3間では、圧電素子51、52のそれぞれには、電圧が印加されていない。そのため、弾性部材233、234のそれぞれは、自らが有する弾性力により、曲げ変形が起こっていない状態(すなわち、外力が付与されていない状態:中立状態)へ戻るように変位する(いわゆる、スプリングバック)。これにより、駆動部材231は、図5(b)に示すように、アクチュエータ1の非駆動時での駆動部材231の位置と一致するように変位する。
T3−T4間では、圧電素子51には、電圧が印加されておらず、圧電素子52には、電圧が印加されている。これにより、圧電素子52が弾性部材234の長手方向へ伸張し、それに伴い、弾性部材234の長手方向での駆動部材231側の端部が下側へ向けて変位する。すなわち、弾性部材234が下側へ向けて曲げ変形する。
これにより、図5(c)に示すように、駆動部材231が回動中心軸Xまわりに、かつ、図5にて時計回りに傾斜する。駆動部材231が傾斜することで、軸部材232が捩れ変形し可動板21が回動中心軸Xまわりに、かつ、図5にて時計回りに傾斜する。
T4−T1間では、圧電素子51および圧電素子52のそれぞれには、電圧が印加されていない。そのため、弾性部材233、234のそれぞれは、自らが有する弾性力により、曲げ変形が起こっていない状態(中立状態)へ戻るように変位する。これにより、駆動部材231は、図5(b)に示すように、アクチュエータ1の非駆動時での駆動部材231の位置と一致するように変位する。
図3に示すように、挙動検知手段7は、圧電素子51の変形により生じる起電力を検出する起電力検出部711と、圧電素子51と起電力検出部711との間に設けられた切換部73と、起電力検出部711で検出された起電力をデジタル信号に変換するA/D変換部721と、圧電素子52の変形により生じる起電力を検出する起電力検出部712と、圧電素子52と起電力検出部712との間に設けられた切換部74と、起電力検出部712で検出された起電力をデジタル信号に変換するA/D変換部722と、圧電素子53の変形により生じる起電力を検出する起電力検出部713と、圧電素子53と起電力検出部713との間に設けられた切換部75と、起電力検出部713で検出された起電力をデジタル信号に変換するA/D変換部723と、圧電素子54の変形により生じる起電力を検出する起電力検出部714と、圧電素子54と起電力検出部714との間に設けられた切換部76と、起電力検出部714で検出された起電力をデジタル信号に変換するA/D変換部724と、A/D変換部721〜724のそれぞれから入力されたデジタル信号に基づいて可動板21の挙動を解析する解析部77とを有している。
スイッチ素子731は、圧電素子51の変形により生じる起電力が起電力検出部711へ入力されるON状態と、この入力が遮断(阻止)されるOFF状態とを切換可能となっている。
具体的には、ドライバ732は、図4(b)に示すように、T2−T3間でスイッチ素子731をOFF状態からON状態に切り換え(以下、この切換時を「Ta」とする)、T4−T1間でスイッチ素子731をON状態からOFF状態に切り換える(以下、この切換時を「Tb」とする)。
スイッチ素子741は、圧電素子52の変形により生じる起電力が起電力検出部712へ入力されるON状態と、この入力が遮断(阻止)されるOFF状態とを切換可能となっている。
具体的には、ドライバ742は、ドライバ732の駆動周期に対して180度ずれて駆動する。すなわち、ドライバ742は、図4(e)に示すように、Tbでスイッチ素子741をOFF状態からON状態に切り換え、Taでスイッチ素子741をON状態からOFF状態に切り換える。
すなわち、スイッチ素子731がOFF状態になる時とスイッチ素子741がON状態となる時とが実質的に一致し、かつ、スイッチ部741がOFF状態になる時とスイッチ素子731がON状態となる時とが実質的に一致する。これにより、起電力検出部711、712によって、圧電素子51、52のうちのいずれかの圧電素子の変形により生じる起電力をアクチュエータ1の駆動時間の全域にわたって検出することができる。
起電力検出部711は、図示しない増幅回路を備えており、この増幅回路にて図3(c)に示すアナログ信号を増幅する。増幅されたアナログ信号は、A/D変換部721に入力され、デジタル信号に変換される。このようなA/D変換の方法としては、特に限定されず、積分型、逐次比較型、前並列型、ΔΣ型などの方法を好適に用いることができる。
一方、スイッチ素子741がON状態のときには、圧電素子52の変形により生じる起電力が起電力検出部712に入力される。このとき、起電力検出部712には、図3(f)に示すようなアナログ信号が入力される。
解析部77は、入力されたデジタル信号を解析し、可動板21の挙動を検知する。このような解析部77は、例えば、制御部8が発信するクロックパルスに基づいて、入力されたデジタル信号がA/D変換部721から出力された信号(すなわち、圧電素子51の変形により生じた起電力)であるのか、A/D変換部722から出力された信号(すなわち、圧電素子52の変形により生じた起電力)であるのかを特定する。
以上のようにして検知された可動板21の挙動は、制御部8に入力される。
制御部8は、挙動検知手段7により検知された可動板21の挙動と、所望の可動板21の挙動とを比較し、その誤差に基づいて電圧波形発生部61の作動を制御し、圧電素子51〜54のそれぞれに印加する電圧を調整する。
以上のように、制御部8が電圧波形発生部61の作動を制御することで、アクチュエータ1は、所望の回動特性を発揮することができる。
また、本実施形態では、切換部73が圧電素子51と起電力検出部711との間に設けられているものについて説明したが、これに限定されず、例えば、起電力検出部711とA/D変換部721との間に設けられていてもよく、A/D変換部721と解析部77との間に設けられていてもよい。このように切換部73が設けられていても、上述した効果と同様の効果を発揮することができる。
次に、本発明のアクチュエータの第2実施形態について説明する。
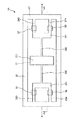
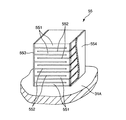
図6は、本発明のアクチュエータの第2実施形態を示す上面図、図7は、図6中のA−A線断面図、図8は、図6に示すアクチュエータが備える圧電素子の拡大図である。なお、説明の便宜上、図7中の上側を「上」、下側を「下」と言う。
本発明の第2実施形態にかかるアクチュエータ1Aは、圧電素子55〜58の構成および配置、支持基板3の構成が異なる以外は、第1実施形態のアクチュエータ1とほぼ同様である。また、前述した第1実施形態と同様の構成には、同一符号を付してある。
そして、このような基台31Aの上面であって、弾性部材233に対向する部位には、圧電素子55が接合されている。同様に、基台31Aの上面であって、弾性部材234に対向する部位には圧電素子56が、弾性部材243に対向する部位には圧電素子57が、弾性部材244に対向する部位には圧電素子58が、それぞれ接合されている。
以下、圧電素子55〜58について説明するが、圧電素子55〜58は、互いに同様の構成および配置であるため、圧電素子55について代表して説明し、圧電素子56〜58については、その説明を省略する。
このような圧電素子55は、図8に示すように、圧電性を有する複数の圧電体層551と、各圧電体層551に電圧を印加するための複数の電極層552とが可動板21の厚さ方向に交互に積層されている。すなわち、圧電素子55は、可動板21の厚さ方向に伸縮する積層型の圧電素子である。このような圧電素子55は、駆動電圧を低減しつつ、変位量を大きくすることができる。
だたし、圧電素子55の構造は、可動板21の厚さ方向へ伸縮することができれば、特に限定されない。また、共通電極553、554は、圧電素子55の側面に設けられていなくてもよく、例えば基台31Aに形成されていてもよい。
このような第3実施形態によっても、第1実施形態と同様の効果を発揮することができる。
本発明の光スキャナは、本発明のアクチュエータと同様の構成である。なお、本発明の光スキャナの実施形態としては、前述した実施形態と同様であるため、詳細な説明を省略する。このような光スキャナは、例えば、プロジェクタ、レーザープリンタ、イメージング用ディスプレイ、バーコードリーダー、走査型共焦点顕微鏡などの画像形成装置に好適に適用することができる。その結果、優れた描画特性を有する画像形成装置を提供することができる。
プロジェクタ9は、レーザーなどの光を照出する光源装置91と、ダイクロイックミラー92と、1対の本発明の光スキャナ93、94(例えば、アクチュエータ1と同様の構成の光スキャナ)とを有している。
光源装置91は、赤色光を照出する赤色光源装置911と、青色光を照出する青色光源装置912と、緑色光を照出する緑色光源装置913とを備えている。
ダイクロイックミラー92は、赤色光源装置911、青色光源装置912、緑色光源装置913のそれぞれから照出された光を合成する光学素子である。
具体的には、まず、ダイクロイックミラー92で合成された光は、光スキャナ93によって横方向に走査される(主走査)。そして、この横方向に走査された光は、光スキャナ94によってさらに縦方向に走査される(副走査)。これにより、2次元カラー画像をスクリーンS上に形成することができる。このような光スキャナ93、94として本発明の光スキャナを用いることで、極めて優れた描画特性を発揮することができる。
また、前述した実施形態では、アクチュエータは、可動板21を中心にほぼ左右対称な形状をなしている構造を説明したが、非対称であってもよい。
また、前述した実施形態では、1対の連結部が可動板をその両側から支持(両持ち支持)するものについて説明したが、これに限定されず、1つの連結部で可動板をその片側で支持(片持ち支持)するように構成されているものであってもよい。
Claims (11)
- 可動板と、
前記可動板を支持するための支持部と、
前記可動板を前記支持部に対して回動可能とするように、前記可動板と前記支持部とを連結する連結部とを有し、
前記各連結部は、前記可動板の回動中心軸を介して互いに対向するように設けられた長手形状をなす1対の弾性部材を備え、前記1対の弾性部材を互いに反対方向へ曲げ変形させて前記可動板を回動させるように構成されたアクチュエータであって、
前記1対の弾性部材のそれぞれに対応するように設けられた1対の圧電素子と、
前記1対の圧電素子に電圧を交互にかつ周期的に印加する電圧印加手段と、
前記1対の圧電素子のうちの1つの圧電素子への電圧の印加が切られた状態において、電圧が切られる前に当該圧電素子に印加されていた電圧によって変形した状態から当該変形が戻るように当該圧電素子が変形することにより生じる起電力に基づいて前記可動板の挙動を検知する挙動検知手段とを有していることを特徴とするアクチュエータ。 - 前記挙動検知手段は、前記圧電素子の変形により生じる起電力を検出する起電力検出部と、該起電力検出部で検出された前記起電力に基づいて前記可動板の挙動を解析する解析部と、前記圧電素子から前記起電力検出部への起電力の入力を必要時に遮断する切換部とを有している請求項1に記載のアクチュエータ。
- 前記切換部は、前記1対の圧電素子のうちの一方の圧電素子の変形により生じる起電力の前記起電力検出部への入力を遮断するタイミングと、他方の圧電素子の変形により生じる起電力の前記起電力検出部への入力を開始するタイミングとが実質的に一致するように構成されている請求項2に記載のアクチュエータ。
- 前記電圧印加手段は、所望の電圧波形を発生させる電圧波形発生部と、前記電圧波形発生部により発生した電圧波形に対応する電圧を前記各圧電素子に印加するドライバとを有している請求項1ないし3のいずれかに記載のアクチュエータ。
- 前記ドライバは、前記1対の圧電素子のうちの一方の圧電素子への電圧印加の終了時と他方の圧電素子への電圧印加の開始時との間、および、前記他方の圧電素子への電圧印加の終了時と前記一方の圧電素子への電圧印加の開始時との間に、所定の時間間隔を設けて、前記1対の圧電素子に交互に電圧を印加する請求項4に記載のアクチュエータ。
- 前記挙動検知手段の検知結果に基づいて前記電圧印加手段の作動を制御する制御部を有する請求項1ないし5のいずれかに記載のアクチュエータ。
- 前記圧電素子は、前記各弾性部材にその長手方向に沿って接合され、前記弾性部材の長手方向へ伸縮することにより、前記各弾性部材を前記曲げ変形させる請求項1ないし6のいずれかに記載のアクチュエータ。
- 前記圧電素子は、前記各弾性部材に接触するように設けられ、前記可動板の厚さ方向へ伸縮することにより、前記各弾性部材を前記曲げ変形させる請求項1ないし6のいずれかに記載のアクチュエータ。
- 前記可動板は、その板面に、光反射性を有する光反射部を備えている請求項1ないし8のいずれかに記載のアクチュエータ。
- 光反射性を有する光反射部を備える可動板と、
前記可動板を支持するための支持部と、
前記可動板を前記支持部に対して回動可能とするように、前記可動板と前記支持部とを連結する連結部とを有し、
前記各連結部は、前記可動板の回動中心軸を介して互いに対向するように設けられた長手形状をなす1対の弾性部材を備え、前記1対の弾性部材を互いに反対方向へ曲げ変形させて前記可動板を回動させ、前記光反射部で反射した光を走査するように構成された光スキャナであって、
前記1対の弾性部材のそれぞれに対応するように設けられた1対の圧電素子と、
前記1対の圧電素子に電圧を交互にかつ周期的に印加する電圧印加手段と、
前記1対の圧電素子のうちの1つの圧電素子への電圧の印加が切られた状態において、電圧が切られる前に当該圧電素子に印加されていた電圧によって変形した状態から当該変形が戻るように当該圧電素子が変形することにより生じる起電力に基づいて前記可動板の挙動を検知する挙動検知手段とを有していることを特徴とする光スキャナ。 - 光反射性を有する光反射部を備える可動板と、
前記可動板を支持するための支持部と、
前記可動板を前記支持部に対して回動可能とするように、前記可動板と前記支持部とを連結する連結部とを有し、
前記各連結部は、前記可動板の回動中心軸を介して互いに対向するように設けられた長手形状をなす1対の弾性部材を備え、前記1対の弾性部材を互いに反対方向へ曲げ変形させて前記可動板を回動させ、前記光反射部で反射した光を走査し、対象物に画像を形成するように構成されている光スキャナを備えた画像形成装置であって、
前記1対の弾性部材のそれぞれに対応するように設けられた1対の圧電素子と、
前記1対の圧電素子に電圧を交互にかつ周期的に印加する電圧印加手段と、
前記1対の圧電素子のうちの1つの圧電素子への電圧の印加が切られた状態において、電圧が切られる前に当該圧電素子に印加されていた電圧によって変形した状態から当該変形が戻るように当該圧電素子が変形することにより生じる起電力に基づいて前記可動板の挙動を検知する挙動検知手段とを有していることを特徴とする画像形成装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007007512A JP5320673B2 (ja) | 2007-01-16 | 2007-01-16 | アクチュエータ、光スキャナおよび画像形成装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007007512A JP5320673B2 (ja) | 2007-01-16 | 2007-01-16 | アクチュエータ、光スキャナおよび画像形成装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008178173A JP2008178173A (ja) | 2008-07-31 |
| JP2008178173A5 JP2008178173A5 (ja) | 2011-04-07 |
| JP5320673B2 true JP5320673B2 (ja) | 2013-10-23 |
Family
ID=39704776
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007007512A Expired - Fee Related JP5320673B2 (ja) | 2007-01-16 | 2007-01-16 | アクチュエータ、光スキャナおよび画像形成装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5320673B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011099890A (ja) * | 2009-11-04 | 2011-05-19 | Seiko Epson Corp | 光走査装置及び画像形成装置 |
| JP5718075B2 (ja) * | 2011-01-24 | 2015-05-13 | スタンレー電気株式会社 | 光偏向モジュール |
| JP6055700B2 (ja) * | 2013-03-13 | 2016-12-27 | スタンレー電気株式会社 | 光偏向モジュール |
| CN103324170B (zh) * | 2013-06-07 | 2015-09-30 | 苏州苏净保护气氛有限公司 | 无级调节现场制气系统采用的控制方法 |
| JP6333079B2 (ja) | 2014-06-12 | 2018-05-30 | スタンレー電気株式会社 | 光スキャナ |
| JP6582519B2 (ja) * | 2015-04-27 | 2019-10-02 | 株式会社リコー | 光偏向装置、2次元画像表示装置、光走査装置及び画像形成装置 |
| JP7420645B2 (ja) * | 2020-05-25 | 2024-01-23 | スタンレー電気株式会社 | 光走査装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4076689B2 (ja) * | 1998-11-27 | 2008-04-16 | セイコーインスツル株式会社 | 圧電アクチュエータ |
| JP2001249300A (ja) * | 2000-03-06 | 2001-09-14 | Anritsu Corp | 光スキャナ |
| JP2002250890A (ja) * | 2001-02-22 | 2002-09-06 | Canon Inc | マイクロ構造体、マイクロ光偏向器、光走査型表示装置、及びそれらの製造方法 |
| JP4023426B2 (ja) * | 2003-09-30 | 2007-12-19 | ブラザー工業株式会社 | 網膜走査型ディスプレイ装置 |
| JP4389740B2 (ja) * | 2004-09-30 | 2009-12-24 | ブラザー工業株式会社 | 振動体制御装置、それを備えた画像形成装置および揺動型スキャナ制御方法 |
| JP2006189697A (ja) * | 2005-01-07 | 2006-07-20 | Canon Inc | 梁振動減衰装置 |
| JP2006223020A (ja) * | 2005-02-08 | 2006-08-24 | Pentax Corp | アクチュエータ制御装置 |
| JP4720717B2 (ja) * | 2006-10-27 | 2011-07-13 | セイコーエプソン株式会社 | 光学デバイス、光スキャナおよび画像形成装置 |
-
2007
- 2007-01-16 JP JP2007007512A patent/JP5320673B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008178173A (ja) | 2008-07-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4400608B2 (ja) | アクチュエータ、光スキャナ、および画像形成装置 | |
| JP5320673B2 (ja) | アクチュエータ、光スキャナおよび画像形成装置 | |
| JP4285568B2 (ja) | アクチュエータ、光スキャナおよび画像形成装置 | |
| US8390912B2 (en) | Actuator, optical scanner and image forming device | |
| JP2008304553A (ja) | アクチュエータ、光スキャナおよび画像形成装置 | |
| US20200183151A1 (en) | Light deflector, optical scanning device, image projection device, and mobile object | |
| US8649080B2 (en) | Two-dimensional optical deflector including only one pair of meander-type piezoelectric actuators and its driver | |
| JP2008295174A (ja) | 揺動装置、同装置を用いた光走査装置、映像表示装置、及び揺動装置の制御方法 | |
| US11644664B2 (en) | Light deflector, optical scanning system, image projection device, image forming apparatus, and lidar device | |
| JP2009009093A (ja) | 画像表示装置 | |
| JP2008111882A (ja) | アクチュエータ、光スキャナおよび画像形成装置 | |
| JP2008178173A5 (ja) | ||
| JP2012154989A (ja) | 光偏向モジュール | |
| JP4868047B2 (ja) | アクチュエータ、光スキャナ、および画像形成装置 | |
| JP4929965B2 (ja) | アクチュエータ、光スキャナおよび画像形成装置 | |
| JP5040558B2 (ja) | 圧電変換素子、アクチュエータ、センサー、光走査装置、及び、光走査型表示装置 | |
| JP6055700B2 (ja) | 光偏向モジュール | |
| JP2004120840A (ja) | 駆動回路及び駆動装置 | |
| JP2006081320A (ja) | アクチュエータ | |
| JP5299489B2 (ja) | アクチュエータ、光スキャナ、および画像形成装置 | |
| JP2018022004A (ja) | 光偏向器、画像表示システム | |
| JP5344071B2 (ja) | アクチュエータ、光スキャナ、および画像形成装置 | |
| JP5299482B2 (ja) | アクチュエータ、光スキャナ、および画像形成装置 | |
| JP5664711B2 (ja) | アクチュエータ、光スキャナ、および画像形成装置 | |
| JP2006075944A (ja) | アクチュエータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100114 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110217 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20120417 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120417 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120426 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20120426 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121009 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130618 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130701 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5320673 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |