JP5197749B2 - 空気力学的な風力推進装置およびその制御方法 - Google Patents
空気力学的な風力推進装置およびその制御方法 Download PDFInfo
- Publication number
- JP5197749B2 JP5197749B2 JP2010522188A JP2010522188A JP5197749B2 JP 5197749 B2 JP5197749 B2 JP 5197749B2 JP 2010522188 A JP2010522188 A JP 2010522188A JP 2010522188 A JP2010522188 A JP 2010522188A JP 5197749 B2 JP5197749 B2 JP 5197749B2
- Authority
- JP
- Japan
- Prior art keywords
- guide line
- line
- aerodynamic
- wing
- aerodynamic wing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H9/00—Marine propulsion provided directly by wind power
- B63H9/04—Marine propulsion provided directly by wind power using sails or like wind-catching surfaces
- B63H9/06—Types of sail; Constructional features of sails; Arrangements thereof on vessels
- B63H9/069—Kite-sails for vessels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H9/00—Marine propulsion provided directly by wind power
- B63H9/04—Marine propulsion provided directly by wind power using sails or like wind-catching surfaces
- B63H9/06—Types of sail; Constructional features of sails; Arrangements thereof on vessels
- B63H9/069—Kite-sails for vessels
- B63H9/072—Control arrangements, e.g. for launching or recovery
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B2035/009—Wind propelled vessels comprising arrangements, installations or devices specially adapted therefor, other than wind propulsion arrangements, installations, or devices, such as sails, running rigging, or the like, and other than sailboards or the like or related equipment
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T70/00—Maritime or waterways transport
- Y02T70/50—Measures to reduce greenhouse gas emissions related to the propulsion system
- Y02T70/5218—Less carbon-intensive fuels, e.g. natural gas, biofuels
- Y02T70/5236—Renewable or hybrid-electric solutions
Description
空力学的ウィングは、気流方向が牽引ケーブルにほぼ垂直になる時、牽引ケーブルの方向に揚力を発生さる空気力学的プロファイルを有する。誘導ラインは、空力学的ウィングまたはステアリング・ユニットに連結される第1端を有する。支柱(詳しくは、先端に頭部を有する帆柱)は、基本プラットフォームに連結され、空力学的ウィングの起動および着陸の際にドッキング・ポイントとなる。
WO2005/100147A1では、ウィング部材の飛行条件に応じて牽引ケーブルを繰り出しまたは繰り寄せることを提案している。そのような制御機構により、ある程度の飛行制御は可能となるが、特に、風力、風向きが大きく変化する時、または、ウィング部材の起動および着陸操作時等、あらゆる飛行条件下でウィング部材を制御するには十全ではない。
これにより、ウィング部材の制御は大幅に向上するが、起動および着陸時等の低高度でのウィング部材の制御はなお困難である。
巨大ウィング部材が水面と接触すれば、システムを回収することは不可能となるので、ウィング部材の制御不能は、システム全体の不能につながる。
ウィング部材を帆柱頂部に連結させるために、応急カジ(rudder pendant)を、その一端で摺動自在に牽引ケーブルに連結させ、その他端でウィング部材に接続させる。この応急カジは、牽引ケーブルがたぐり寄せられてウィング部材が低高度に来ると、アクセス可能となる。よって、応急カジを手動で牽引ケーブルから外し、ウィング部材が帆柱の頂部へ牽引されるよう、応急カジを誘導することができる。
応急カジを牽引ケーブルから外し、帆柱頂部に向かう引張力がウィング部材に作用するように誘導すれば、そのような技術は、起動および着陸操作時のウィング部材の操作性を大きく向上させるかもしれない。しかし、応急カジを用い、これを起動および着陸操作の行程で手動操作することはかなり複雑な操作であって、応急カジと牽引ケーブル間の連結または取外しの失敗は、システム全体の故障およびウィング部材の損失につながる。
誘導ラインに低い一定の引張力を作用させることで、空力学的ウィングを制御する反応時間は更に短縮される。何故なら、誘導ラインの緩みを繰り寄せることなく、直ちに、引張力を増大させることが可能になるからである。本発明による空力学的ウィングのこうした直接制御は、起動および着陸操作に特に重要である。何故なら、空力学的ウィングの制御は、起動および着陸操作中に必要性が高くなるからである。
しかし、起動操作と着陸操作の間の飛行段階においても、基本プラットフォームと空力学的ウィングを誘導ラインを介して連続的に常時接続しておくとこで、大きな利点が得られる。何故なら、一方では、空力学的ウィングと共に飛行している誘導ラインの位置が制御され、誘導ラインの捻れ(例えば、牽引ケーブルと共に捻れる)を軽減もしくは防止することができる。他方では、誘導ラインを介して連続的に接続しておくことにより、空力学的ウィングが萎んだり、水に濡れる等、空力学的ウィングの損失を招くような不安定な状況下において、空力学的ウィングの回収操作を迅速に開始することができる。
よって、誘導ラインを介して、空力学的ウィングを帆柱頭部へ向かって引き寄せ得ることが望ましい。
この好適な実施形態では、空力学的ウィングの着陸過程において、揚力を減少させることが可能である。着陸段階では、帆柱頭部近くの着陸位置へと、空力学的ウィングを容易に移動させ得ることが望まししい。
空力学的ウィングは、飛行段階で最大揚力を発生できるサイズとされているので、そのプロファイルおよび寸法は、空力学的ウィングを下方の支柱頭部へ向かって引っ張る力に反抗するものとなる。よって、着陸操作の際は、空力学的ウィングの揚力を減少させるのが好ましい。
このことは、縮帆ラインを用いて実現される。縮帆ラインは、空力学的ウィングの表面およびプロファイルを横切り、好ましくは、中央の強化部材に関して対称なパターンで張り巡らされている。これらの縮帆ラインは、繰り寄せられるときに、揚力を減少させるように、空力学的ウィングの寸法およびプロファイルを変化させる。
このように、ブロック要素がブロック状態にある時は、縮帆ラインを繰り寄せることなく、引張力を誘導ラインにかけることができる。例えば、飛行段階において、空力学的ウィングの寸法またはプロファイルの変化が望ましくない場合、この態様が好ましい。
起動および着陸段階においても、空力学的ウィングの動きのより良い制御を可能にするために、縮帆ラインを繰り寄せ始める時期を積極的に定めることが望ましい。例えば着陸時において、空力学的ウィングがその着陸位置に到達もしくはほぼ到達した時、誘導ラインを繰り寄せて、ブロック要素をそのブロック状態から非ブロック状態に変化させるだけで、空力学的ウィングをその着陸位置、あるいはその近傍に引き寄せることが望ましい。
このようにして、空力学的ウィングがその着陸位置から遠く離れた位置にあるときに、アクシデントにより空力学的ウィングのプロファイルもしくは寸法が変化し、例えば、揚力が低下して水に触れた空力学的ウィングが損失するという危険性を回避できる。
空気力学的な風力推進装置の主要な適用分野は船舶であるので、風抵抗は、通常、最適化されるべきパラメータである。よって、空気力学的な風力推進装置を使用しない間は、帆柱から発生する風抵抗を最小にするのが望ましい。
また、以上の構成により、帆柱、帆柱頭部または帆柱頭部アダプタ要素の点検、オーバーホール、その他、帆柱に近づいて作業を行うことが必要な場合、硬質のアダプタ要素が配置された帆柱頂部に容易に到達できる。
プーリを介して誘導ラインを誘導することで、確実に、誘導ラインは、基本プラットフォームに対し本質的に角度が可変の状態で誘導され、向きを変えるポイントにおける摩擦を最小にすることができる。
飛行段階において空力学的ウィングの揚力によって発生する主要な力は、牽引ケーブルを介して基本プラットフォームに伝達されるが故に、牽引ケーブルは、非常に高い引張力を担わなればならない。一方、誘導ラインは、空力学的ウィングがその最大揚力に達しない段階において、空力学的ウィングを制御するのに使用されるので、誘導ラインに生じる力は、通常、牽引ケーブルに生じる力より遙かに低い。
この担うべき力の関係の結果、牽引ケーブルと誘導ラインの寸法関係も、それに類似したものとなる。誘導ラインの直径は牽引ケーブルの直径よりかなり小さくてもよく、よって、ウィング部材に働く誘導ラインの重さは大幅に減少する。また、牽引ケーブルと誘導ラインは、異なる材料で構成されてもよい。
信号線および(または)電力線は、誘導ラインに平行、もしくは、誘導ライン内で同心状に配置される。誘導ライン内にそのような信号線および(または)電力線を設けても、誘導ラインの重さまたは寸法は大幅に増大することはなく、それ故、誘導ラインによる風抵抗もそれほど大きくならない。このように、航海船舶を引っ張るウィング部材の動力を大幅に減少させるものではない。
多くの場合、ウィング部材をステアリング・ユニットに連結する複数のラインによってウィング部材の飛行姿勢は水平状態とされており、誘導ラインによる追加的な影響は、空力学的ウィング部材の動力を大幅に減少させ、制御不能の状態をもたらす。
このような欠点を打破すべく、誘導ラインをステアリング・ユニットに、次のように連結させる。すなわち、誘導ラインの重さに起因する力を、ウィング部材には直接作用させず、ステアリング・ユニットに作用させる。これにより、誘導ラインを介してウィング部材に作用する力は減少もしくは消滅し、その結果、ウィング部材をステアリング・ユニットに連結する複数のラインを介してのみ、ウィング部材に負荷を与えることができる。
そのような誘導ラインのステアリング・ユニットへの選択的な連結は、ある一点で誘導ラインに連結されている短いラインの使用により容易に実現できる。その一点は、ウィング部材に連結された誘導ラインの第1端からある距離に位置しており、それは、当該第1端とステアリング・ユニット間の距離に対応している。
この短い連結ラインは、次のようにしてステアリング・ユニットに連結されている。すなわち、この短い連結ラインが繰り寄せられると、誘導ラインがステアリング・ユニットの方に引き寄せられ、連結ラインが完全に繰り寄せられた時、誘導ラインがステアリング・ユニットに固定される。
着陸操作を開始する前に、連結ラインを繰り出して、誘導ラインを介して直接的に引張力を、ウィング部材に作用させてもよい。
本発明によれば、誘導ラインのこの部分に、絶えず、誘導ラインを緊張した状態に保つのに充分な低い引張力をかけて、誘導ラインを繰り寄せる際や繰り出す際に、誘導ラインに捩れや節が生じるのを防いでいる。
これらの張力プーリを、例えば、帆柱頂部に配置したプーリの下に配置する。ケーブルまたはラインを張力プーリ間に通して、張力プーリを、例えばバネを介してケーブルまたはラインに押し付けると、張力プーリは、ケーブルまたはラインに張力を付与できる。
ケーブル(またはライン)と張力プーリ間の滑り、または少なくとも、ケーブル(またはライン)と張力プーリの過度の摩耗を防止するために、バネの張力および誘導ラインに付与されるトルクを、ケーブル(またはライン)および張力プーリの寸法および素材に合わせて調整すべきである。
繰り出しまたは繰り寄せ中に誘導ラインに作用する力は、通常、張力プーリのトルクを介して誘導ラインに付与される引張力より大きいので、この力は容易に引張力に打ち勝つことができる。張力プーリのブロック機構が無いので、一旦、繰り出しまたは繰り寄せの高い力がかかると、張力プーリは、誘導ラインまたは牽引ケーブルの動きに追随して自由回転することが可能である。
誘導ライン、牽引ケーブル、または張力プーリが摩耗あるいは摩滅すると、一定のトルクが付与された誘導ラインまたは牽引ケーブルの引張力を低下するので、この調整が必要になる。最悪の場合、張力が一切生じず、牽引装置が機能しなくなることもある。
付与される力の正確な制御は、空力学的ウィングを首尾良く制御するのに必要であるので、誘導ラインまたは牽引ケーブルに常に一定の張力を与えるためには、張力プーリ間に作用するトルクおよび(または)張力を調整する(特に増大させる)ことが重要である。
この少なくとも1つのウインチは、2つの操作モードを有し、第1操作モードでは、高速で低い力をかけ、第2操作モードでは、低速で高い力をかける。
他方、繰り寄せに反する張力が非常に高い状況では、低速で高い力をかける操作モードを使用するのが好ましい。
空気力学的な風力推進装置を使用して生じる力は大きいので、駆動アッセンブリでウインチを駆動することが好ましい。上記のように異なる操作モードを適用するためには、1つの駆動ユニットが選択的に切替可能な2つの操作モードを有するか、1方が第1モードを、他方が第2モードを担う2つの駆動ユニットを設ける。
別個の駆動ユニットを使って異なる操作モードを実現させる場合、必要な駆動ユニットを必要に応じてウインチに連結して、特定された操作モードが実行されることを、確実としなければならない。
1つのウインチと関連して2つの駆動ユニットが存在する場合、必要とされている操作モードに応じて、1つのカップリングが何れかの駆動ユニットを選択的にウインチに連結する。
この結果、起動または着陸操作の一部としての誘導段階において、ある引張力を誘導ラインに保持させることができる。
ステアリング・プラットフォームと基本プラットフォーム間の距離が約40メートル、あるいはそれ以上である場合に、この実施形態が当てはまる。
最も低空の飛行領域において、この実施形態が当てはまる。それは、ステアリング・プラットフォームと基本プラットフォーム間の距離が約30メートル、あるいはそれ以下の場合である。
この少なくとも1つのウインチは、2つの操作モードで操作される。第1の操作モードでは、高速で低い力を作用させ、第2の操作モードでは、低速で高い力を作用させる。これについては、上記2つの操作モードの詳細とその利点の説明を参照されたい。
操作モードの選択は、空気力学的な風力推進装置の操作状況に応じて行う。
この改良において、支柱は、牽引装置と、特に互いに対向する一対の張力プーリとを含み、一対の張力プーリは、その間に通される誘導ラインと係合し、当該誘導ラインに、特にトルクを介して、引張力を作用させる。
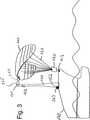
空気力学的な風力推進装置100は、第1端151が空力学的ウィング110に連結された誘導ライン150と、基本プラットフォーム170に連結された支柱160と、をさらに含む。支柱160は、頭部161を有する。
ウィングの飛行段階において、牽引ケーブル140は、空力学的ウィング110の揚力により付与される引張力を基本プラットフォームに伝える。誘導ライン150は、第1端151にてウィング内に設けられた中心棒111に連結されている。中心棒111は、ウィング部材を強化するものである。中心棒111の連結部がウィングの前方に突き出ている。この連結部は、支柱頭部161に機械的に連結することができる。
誘導ラインの第2端152は、基本プラットフォーム170に接続されたウインチ163に巻き付けられており、誘導ラインは、牽引ケーブルと共に飛行するが、大きな引張力を担うものではない。
ウィング110と共に飛行する誘導ライン150が、他の部材、例えば、牽引ケーブル140と捻れるのを防ぐために、かつ、反応時間を短縮するために、小さな引張力が誘導ライン150にかけられている。これは、ウインチ163を介して誘導ライン150を繰り出しおよび繰り寄せることで実現され、小さな、好ましくは一定の、所定引張力が誘導ライン150に生じる。
これは、誘導段階がこれから始まることを示している。何故なら、基本プラットフォーム170とステアリング・ユニット130との間の牽引ケーブル140の残りの長さが、支柱160の高さと殆ど同じである時、ウィングの誘導段階が始まることが好ましいからである。
繰り寄せられるべき誘導ラインの最終部分に対してのみ(詳しくは、支柱高さにほぼ等しく、かつ空力学的ウィングのサイズにより変化する、誘導ラインの所定長さの部分に対してのみ)、ウインチは、第2操作モードで操作されて、低速の高い力を作用させ、それによって、空力学的ウィング110の中心棒111を支柱頭部165に設けた相補的な硬質の取付器具に連結するのに必要な力を付与する。
このことは、空気力学的な風力推進装置に関しては、ステアリング・ユニットと空力学的ウィング間の距離は、通常、支柱または帆柱の高さとほぼ同じでなければならないことを意味している。
誘導ライン250は、支柱261の頂部近くに配置されたプーリ268を介して誘導される。このプーリ268の下方に、一対の張力プーリ262が配置されている。誘導ライン250は、この2つの張力プーリ262aと262bの間を通り、基本プラットフォーム270に接続されたウインチ263に達し、そこからさらに、基本プラットフォーム270に接続されたケーブル収納手段266に達している。
張力プーリ262aは、回転磁界マグネット(図示せず)により駆動され、トルクを介して、誘導ラインの部分267に引張力を付与し、当該部分267を低い一定の張力以下に保持する。誘導ラインの当該部分267は、基本プラットフォーム270に配置されるウインチ263から、支柱頂部に配置された一対の張力プーリ262まで延在する誘導ラインの部分である。
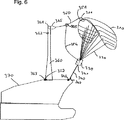
誘導ラインは、短い連結ライン354を用いて、選択的にステアリング・ユニット330に固定してもよい。この短い連結ライン354は、誘導ラインのポイント353を固定している。このポイント353は、空力学的ウィング310に連結された誘導ラインの第1端351から所定距離に位置しているもので、その距離は、空力学的ウィングとステアリング・ユニット330間の距離にほぼ対応している。
この短い連結ライン354は、次のような態様で、ステアリング・ユニット330に連結されている。すなわち、当該連結ライン354が繰り寄せられると、誘導ライン350をステアリング・ユニット330へと引き寄せ、連結ライン354が完全にステアリング・ユニットに繰り寄せられた時、誘導ラインをステアリング・ユニットに固定させる。
図5は、当該実施形態を飛行状態で示している。空力学的ウィング310をステアリング・ユニット330に連結している複数のライン320を介してのみ、空力学的ウィング310に負荷を与えるのが望ましい。図5に示したように、短い連結ライン354は繰り寄せられていて、誘導ライン350の重みで生じる力は、空力学的ウィング310に直接作用せず、ステアリング・ユニット330に作用する。
起動および着陸操作においては、連結ライン354が繰り出されて(図示せず)、誘導ライン350を介して、直接的な引張力を空力学的ウィング310に作用させることができる。
誘導ラインの第2端352は、ウインチ363を介して基本プラットフォーム370に固定されている。連結ライン354は、誘導ライン350に沿ってスライド可能な摺動部材355を介して、誘導ライン350に連結されている。連結ライン354が完全に繰り寄せられ、誘導ライン350がステアリング・ユニット330に連結された時、誘導ラインと摺動部材355間のスライド動作はブロック(阻止)される。これにより、直接的な引張力が誘導ライン350を介して空力学的ウィング310に及ぶのを防いでいる。
第1駆動ユニット520は第1モードで操作可能であり、当該第1モードは、ウインチ510がカップリング530を介して第1駆動ユニット520に連結されたとき、ウインチ510に高速で低トルクを作用させる。その結果、ウインチ510は、当該ウインチに関連するライン(図示せず)に、高速で低い力を作用させる。
第2駆動ユニット(図示せず)は第2モードで操作可能であり、当該第2モードは、ウインチ510がカップリング530を介して第2駆動ユニットに連結されたとき、ウインチ510に低速で高いトルクを作用させる。その結果、ウインチ510は、当該ウインチに関連するライン(図示せず)に、低速で高い力を作用させる。
Claims (34)
- 船舶に使用する空気力学的な風力推進装置であって、
空力学的ウィングと、牽引ケーブルと、誘導ラインと、支柱と、を備え、
空力学的ウィングは、複数のステアリング・ラインおよび(または)牽引ラインを介して、その下方に位置するステアリング・ユニットに接続され、
牽引ケーブルは、第1端がステアリング・ユニットに接続され、第2端が基本プラットフォームに接続され、
空力学的ウィングは、気流方向が牽引ケーブルにほぼ垂直になる時、牽引ケーブルの方向に揚力を発生さる空気力学的プロファイルを有し、
誘導ラインは、空力学的ウィングまたはステアリング・ユニットに連結される第1端を有し、
支柱は、基本プラットフォームに連結され、空力学的ウィングの起動および着陸の際にドッキング・ポイントとなり、
起動操作時および着陸操作時、並びに起動操作と着陸操作の間において、誘導ラインの第2端が基本プラットフォームに接続されていて、
誘導ラインは、支柱を介してまたは支柱に沿って誘導され、少なくとも、起動または着陸時に、引張力を空力学的ウィングに伝えることが可能であることを特徴とする、風力推進装置。 - 上記誘導ラインの第1端は、空力学的ウィングに固定された硬質の強化部材に連結されていて、
支柱の頂部は、この強化部材に機械的に連結可能な硬質のアダプタ要素を備える、請求項1記載の風力推進装置。 - 上記空力学的ウィングに複数の縮帆ラインを張り巡らせ、空力学的ウィングの空気力学的プロファイルまたは寸法を変化させて、空気力学的特性を変えることで、縮帆ラインを繰り寄せると揚力が減少するよう構成した、請求項1または2記載の風力推進装置。
- 上記誘導ラインの第1端を複数の縮帆ラインに連結させ、誘導ラインを介して、縮帆ラインの繰寄せを行う、請求項3記載の風力推進装置。
- 上記複数の縮帆ラインを、空力学的ウィングに固定された中心棒等の強化部材に沿って、少なくとも部分的に誘導する、請求項3または4記載の風力推進装置。
- 上記複数の縮帆ラインと誘導ラインの第1端とを負荷伝達状態で接続するブロック要素を設け、
当該ブロック要素は、ブロック状態では、縮帆ラインが繰り寄せられるのを防ぐとともに、非ブロック状態では、縮帆ラインを繰り寄せる、請求項3、4または5記載の風力推進装置。 - 上記支柱が、テレスコーピック式の帆柱、および(または)基本プラットフォームに対する回動連結部を有していて、実質的に水平方向に畳むことのできる帆柱である、請求項1〜6のいずれか1つに記載の風力推進装置。
- 上記誘導ラインを、支柱頂部に挿通し、プーリを介して誘導する、請求項1〜7のいずれか1つに記載の風力推進装置。
- 上記牽引ケーブルは高い引張力を担うことができ、および(または)、上記誘導ラインは低い引張力を担うことができ、詳しくは、
誘導ラインの引張力は、牽引ケーブル引張力の約0.5〜3%である、請求項1〜8のいずれか1つに記載の風力推進装置。 - 上記誘導ライン内に、信号および(または)電力の伝達ラインを設けた、請求項1〜9のいずれか1つに記載の風力推進装置。
- 上記誘導ラインを選択的にステアリング・ユニットに固定するためのカップリング部材を設けた、請求項1〜10のいずれか1つに記載の風力推進装置。
- 上記誘導ラインの一部分を、基本プラットフォームと支柱の頂部との間にも延在させるとともに、支柱には、誘導ラインの当該部分に引張力を作用させることができる牽引装置を設けた、請求項1〜11のいずれか1つに記載の風力推進装置。
- 上記牽引装置を、対向して配置されて誘導ラインをその間に係合させる2台の張力プーリで構成し、少なくとも一方の張力プーリは、トルクを介して誘導ラインに引張力を付与する、請求項12記載の風力推進装置。
- 上記2台の張力プーリの少なくとも1つを駆動アッセンブリで駆動し、当該駆動アッセンブリは、回転磁界マグネットである、請求項13記載の風力推進装置。
- 上記張力プーリが、誘導ラインまたは牽引ケーブルの動きに追随して自由回転するモードに設定可能である、請求項13または14記載の風力推進装置。
- 上記張力プーリのトルクおよび(または)張力が調整可能であり、これによって、張力プーリ、誘導ライン、または牽引ケーブルの摩耗を補償する、請求項13、14または15記載の風力推進装置。
- 牽引ケーブルの第2端および(または)誘導ラインの第2端を、少なくとも1つのウインチを介して基本プラットフォームに連結し、牽引ケーブルまたは誘導ラインの繰出しまたは繰寄せを行い、
上記少なくとも1つのウインチは、2つの操作モードを有し、第1操作モードでは、高速で低い力をかけ、第2操作モードでは、低速で高い力をかける、請求項1〜16のいずれか1つに記載の風力推進装置。 - 上記少なくとも1つのウインチを、2種類の操作モードで作動する1つの駆動ユニット、または、1方が第1操作モードで作動し、他方が第2操作モードで作動する2つの駆動ユニットに連結してなる、請求項17記載の風力推進装置。
- 2つの個別の駆動ユニットを有し、当該2つの駆動ユニットの一方を選択的に、少なくとも1つのウインチに連結するカップリングを少なくとも1つ有する、請求項18記載の風力推進装置。
- 請求項1〜19のいずれか1つに記載の風力推進装置を備えた船舶。
- 船舶を駆動することを目的とした、請求項1〜19のいずれか1つに記載の風力推進装置の使用。
- 空力学的ウィングの起動、着陸、回収を目的とした、請求項1〜19のいずれか1つに記載の風力推進装置の使用。
- 船舶に使用する空気力学的な風力推進装置を制御する方法であって、
空力学的ウィングを、複数のステアリング・ラインおよび(または)牽引ラインを介して、その下方に位置するステアリング・ユニットに接続する工程と、
牽引ケーブルの第1端をステアリング・ユニットに接続し、第2端を基本プラットフォームに接続する工程と、
誘導ラインの第1端を空力学的ウィングまたはステアリング・ユニットに連結する工程と、
基本プラットフォームに連結され、空力学的ウィングの起動および着陸の際にドッキング・ポイントとなる支柱を提供する工程と、
ステアリング・ユニットを介して、空力学的ウィングの飛行を操舵する工程と、を含んでいて、次の工程に特徴を備える、すなわち、
誘導ラインの第2端を基本プラットフォームに連結する工程と、
起動操作時および着陸操作時、並びに起動操作と着陸操作の間において、誘導ラインを支柱を介してまたは支柱に沿って誘導する工程と、
少なくとも起動および着陸時に、誘導ラインの異なる機能に応じて、当該誘導ラインに作用する引張力を管理する工程と、に特徴を備える制御方法。 - 空力学的ウィングの揚力により誘導ラインの第1端に作用する引張力に応答して、当該誘導ラインの第2端に作用する引張力を調整し、これにより、起動または着陸操作の一部としての誘導段階において、ある引張力を誘導ラインに保持させる工程に特徴を有する、請求項23記載の制御方法。
- 飛行段階において、牽引ケーブルと平行して誘導ラインを繰り出し、かつ、繰り寄せ、そのとき、誘導ラインは、引張力を殆ど(または、全く)伝えないことを特徴とする、請求項23または24記載の制御方法。
- 着陸段階において、もしくは不安定な状態にある空力学的ウィングを回収するために、誘導ラインの第2端に力をかけて誘導ラインを繰り寄せることを特徴とする、請求項23〜25のいずれか1つに記載の制御方法。
- 起動段階において、低速度かつ高い力の駆動アッセンブリを使用して、空力学的ウィングを広げることを特徴とする、請求項23〜26のいずれか1つに記載の制御方法。
- 牽引ケーブルの第2端および(または)誘導ラインの第2端に接続されて、当該牽引ケーブルまたは誘導ラインの繰出しおよび繰寄せを行う、少なくともウインチを提供する工程と、
上記少なくとも1つのウインチを、高速で低い力を作用させる第1操作モードと、低速で高い力を作用させる第2操作モードとの2つの操作モードで操作する工程と、に特徴を備える、請求項23〜27のいずれか1つに記載の制御方法。 - 上記誘導ラインのウインチは、誘導段階では第1操作モードで操作され、空力学的ウィングを広げる段階および畳む段階では第2操作モードで操作され、空力学的ウィングを回収する段階では第1または第2の操作モードで操作される、請求項28記載の制御方法。
- 基本プラットフォームと支柱の頂部との間に延びる誘導ラインの部分に引張力がかけられ、
上記支柱は、牽引装置と、互いに対向する一対の張力プーリとを含み、当該一対の張力プーリは、その間に通される誘導ラインと係合し、当該誘導ラインにトルクを介して、引張力を作用させる、請求項23〜29のいずれか1つに記載の制御方法。 - 上記牽引装置を、駆動アッセンブリを用いて駆動することを特徴とする、請求項30記載の制御方法。
- 上記牽引装置のトルクおよび(または)引張力を調節することで、誘導ラインまたは張力プーリの摩耗を補償することを特徴とする、請求項30または31記載の制御方法。
- 上記誘導ライン内に設けた信号ラインおよび(または)電力ラインによって、信号および(または)電力を伝えることを特徴とする、請求項23〜32のいずれか1つに記載の制御方法。
- 上記誘導ラインは、少なくとも空力学的ウィングの起動時と着陸時の間において、ステアリング・ユニットに固定されている、請求項23〜33のいずれか1つに記載の制御方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/EP2007/007449 WO2009026939A1 (en) | 2007-08-24 | 2007-08-24 | Aerodynamic wind propulsion device and method for controlling |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010536652A JP2010536652A (ja) | 2010-12-02 |
| JP5197749B2 true JP5197749B2 (ja) | 2013-05-15 |
Family
ID=39477573
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010522188A Expired - Fee Related JP5197749B2 (ja) | 2007-08-24 | 2007-08-24 | 空気力学的な風力推進装置およびその制御方法 |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US8117977B2 (ja) |
| EP (1) | EP2193075B1 (ja) |
| JP (1) | JP5197749B2 (ja) |
| KR (1) | KR101466423B1 (ja) |
| CN (1) | CN101687537B (ja) |
| AU (1) | AU2007358087B2 (ja) |
| EA (1) | EA015310B1 (ja) |
| HK (1) | HK1141261A1 (ja) |
| NO (1) | NO20100432L (ja) |
| NZ (1) | NZ583494A (ja) |
| WO (1) | WO2009026939A1 (ja) |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9521858B2 (en) | 2005-10-21 | 2016-12-20 | Allen Szydlowski | Method and system for recovering and preparing glacial water |
| US9010261B2 (en) | 2010-02-11 | 2015-04-21 | Allen Szydlowski | Method and system for a towed vessel suitable for transporting liquids |
| US8847421B2 (en) | 2008-07-16 | 2014-09-30 | Anadarko Petroleum Corporation | Subsystems for a water current power generation system |
| PL2184224T3 (pl) * | 2008-11-11 | 2012-03-30 | Harken Italy Spa | Urządzenie i sposób automatycznej regulacji powierzchni żagla wystawionej na działanie wiatru |
| US9371114B2 (en) | 2009-10-15 | 2016-06-21 | Allen Szydlowski | Method and system for a towed vessel suitable for transporting liquids |
| US9017123B2 (en) | 2009-10-15 | 2015-04-28 | Allen Szydlowski | Method and system for a towed vessel suitable for transporting liquids |
| WO2011047275A1 (en) | 2009-10-15 | 2011-04-21 | World's Fresh Waters Pte. Ltd | Method and system for processing glacial water |
| US11584483B2 (en) | 2010-02-11 | 2023-02-21 | Allen Szydlowski | System for a very large bag (VLB) for transporting liquids powered by solar arrays |
| DE202011102743U1 (de) * | 2011-07-04 | 2012-11-15 | Skysails Gmbh | Vorrichtung zur Steuerung eines gefesselten Flugelements |
| WO2013085800A1 (en) | 2011-12-04 | 2013-06-13 | Leonid Goldstein | Wind power device with dynamic sail, streamlined cable or enhanced ground mechanism |
| EP2831410A2 (en) | 2012-03-27 | 2015-02-04 | E-Kite Holding B.V. | Kite power system |
| WO2013164446A1 (en) | 2012-05-03 | 2013-11-07 | Skysails Gmbh | Mast arrangement and method for starting and landing an aerodynamic wing |
| CN104379443A (zh) * | 2012-05-03 | 2015-02-25 | 天帆有限责任公司 | 气动风能转换装置及控制该装置的方法 |
| WO2014018424A1 (en) * | 2012-07-22 | 2014-01-30 | Leonid Goldstein | Airborne wind energy conversion system with ground generator |
| WO2014109917A1 (en) * | 2013-01-10 | 2014-07-17 | Leonid Goldstein | Airborne wind energy system |
| US20150330368A1 (en) * | 2014-05-18 | 2015-11-19 | Leonid Goldstein | Airborne wind energy system with rotary wing, flying generator and optional multi-leg tether |
| EP3218258A4 (en) * | 2014-11-14 | 2018-08-08 | Lamberg, Vemund | Adjustable sail and a vessel comprising such a sail |
| DE102015111224A1 (de) | 2015-07-10 | 2017-01-12 | Skysails Gmbh | Start- und Bergevorrichtung für ein gefesseltes Windkraftelement |
| GB201520413D0 (en) * | 2015-11-19 | 2016-01-06 | Kite Power Solutions Ltd | Docking system |
| TWI592336B (zh) * | 2016-03-03 | 2017-07-21 | 輔英科技大學 | 探空氣球繫留控制裝置 |
| US10309374B2 (en) * | 2016-12-01 | 2019-06-04 | Makani Technologies Llc | Energy kite winching using buoyancy |
| US10569871B2 (en) * | 2017-09-07 | 2020-02-25 | Maritime Applied Physics Corporation | Apparatus, device and method for automated launch and recovery of a kite |
| FR3082185B1 (fr) * | 2018-06-11 | 2020-10-02 | Airseas | Systeme de traction comprenant au moins deux voiles captives avec un mat pourvu de moyens d'accostage distincts dedies chacun a une voile |
| FR3082184B1 (fr) * | 2018-06-11 | 2020-07-03 | Airseas | Systeme comprenant une voile captive et un poste fixe avec des moyens de pliage de la voile au poste fixe |
| US11492086B2 (en) * | 2019-11-13 | 2022-11-08 | Peter Chiara | Integrated kiteboarding canopy self launching and landing safety systems |
| FR3120848B1 (fr) * | 2021-03-19 | 2023-12-29 | Airseas | Système de traction à aile captive et à ligne d’arrimage volante |
| FR3133833A1 (fr) * | 2022-03-25 | 2023-09-29 | Maloric | Systeme de commande automatique d’une aile de traction |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2098950A (en) * | 1981-05-21 | 1982-12-01 | British Petroleum Co Plc | Launching tethered sails for marine or other uses |
| GB2098949A (en) * | 1981-05-21 | 1982-12-01 | British Petroleum Co Plc | A method of launching a tethered sail from a ship |
| GB2098947A (en) | 1981-05-21 | 1982-12-01 | British Petroleum Co Plc | Reefing a tethered sail for marine or other use |
| GB2098946A (en) * | 1981-05-21 | 1982-12-01 | British Petroleum Co Plc | A tethered sail assembly for marine or other uses |
| JPS5843894A (ja) * | 1981-08-22 | 1983-03-14 | ウオ−カ−・ウイングセイル・システムズ・リミテツド | ウィングセイルアセンブリ |
| JPS58206490A (ja) * | 1982-05-25 | 1983-12-01 | ザ・ブリテイツシユ・ピトロ−リアム・コンパニ−・ピ−・エル・シ− | 上昇帆およびその制御 |
| JPS58206489A (ja) * | 1982-05-25 | 1983-12-01 | ザ・ブリテイツシユ・ピトロ−リアム・コンパニ−・ピ−・エル・シ− | 上昇帆およびその制御 |
| US4497272A (en) * | 1982-06-01 | 1985-02-05 | Veazey Sidney E | Mastless sails |
| FR2541964A1 (fr) * | 1983-03-04 | 1984-09-07 | Rivallant Pierre | Dispositif pour la propulsion par le vent d'un engin marin ou terrestre |
| DE3518131A1 (de) | 1985-05-21 | 1986-11-27 | Dieko 8720 Schweinfurt Bruins | Fahrzeugantrieb mit schwebesegel |
| JPH05286492A (ja) * | 1992-04-08 | 1993-11-02 | Kawasaki Heavy Ind Ltd | 風力発電船 |
| JP3343748B2 (ja) * | 1993-10-22 | 2002-11-11 | 株式会社グリーン | キャノピ−付き飛行機玩具 |
| FR2740427B1 (fr) * | 1995-10-26 | 1998-01-02 | Chatelain Pierre Jean Luc | Navire tracte par cerf-volant via un bras articule |
| US5642683A (en) * | 1996-04-26 | 1997-07-01 | Bedford; Norman | Parachute-type sail for boats |
| EP1313642B1 (de) * | 2000-08-31 | 2006-04-26 | Edwin Lundgren | Steuervorrichtung für einen lenkdrachen an einem boot |
| FR2822802B1 (fr) * | 2001-03-29 | 2004-05-14 | Maurice Grenier | Embarcation nautique tractee par une voilure cerf-volant |
| US6925949B1 (en) * | 2002-12-31 | 2005-08-09 | Malcolm Phillips | Elevated sailing apparatus |
| DE102004018838A1 (de) * | 2004-04-19 | 2005-11-03 | Skysails Gmbh | Positionierungsvorrichtung für ein frei ausfliegendes drachenartiges Windangriffselement bei einem Wasserfahrzeug mit Windantrieb |
| US7866271B2 (en) * | 2004-04-19 | 2011-01-11 | Skysails Gmbh & Co. Kg | Placement system for a flying kite-type wind-attacked element in a wind-powered watercraft |
| DE102004018814A1 (de) * | 2004-04-19 | 2005-11-03 | Skysails Gmbh | Setzsystem für ein ausfliegendes drachenartiges Windangriffselement bei einem Wasserfahrzeug mit Windantrieb |
-
2007
- 2007-08-24 JP JP2010522188A patent/JP5197749B2/ja not_active Expired - Fee Related
- 2007-08-24 WO PCT/EP2007/007449 patent/WO2009026939A1/en active Application Filing
- 2007-08-24 NZ NZ583494A patent/NZ583494A/xx not_active IP Right Cessation
- 2007-08-24 EP EP07801876A patent/EP2193075B1/en active Active
- 2007-08-24 CN CN2007800535813A patent/CN101687537B/zh not_active Expired - Fee Related
- 2007-08-24 AU AU2007358087A patent/AU2007358087B2/en not_active Ceased
- 2007-08-24 US US12/674,822 patent/US8117977B2/en active Active
- 2007-08-24 EA EA201000261A patent/EA015310B1/ru not_active IP Right Cessation
- 2007-08-24 KR KR1020107003125A patent/KR101466423B1/ko not_active IP Right Cessation
-
2010
- 2010-03-23 NO NO20100432A patent/NO20100432L/no not_active Application Discontinuation
- 2010-08-11 HK HK10107671.9A patent/HK1141261A1/xx not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| NZ583494A (en) | 2012-12-21 |
| EA015310B1 (ru) | 2011-06-30 |
| EP2193075A1 (en) | 2010-06-09 |
| CN101687537A (zh) | 2010-03-31 |
| AU2007358087A1 (en) | 2009-03-05 |
| HK1141261A1 (en) | 2010-11-05 |
| NO20100432L (no) | 2010-05-20 |
| EA201000261A1 (ru) | 2010-06-30 |
| CN101687537B (zh) | 2013-01-02 |
| US8117977B2 (en) | 2012-02-21 |
| KR101466423B1 (ko) | 2014-11-28 |
| AU2007358087B2 (en) | 2013-10-10 |
| WO2009026939A1 (en) | 2009-03-05 |
| JP2010536652A (ja) | 2010-12-02 |
| EP2193075B1 (en) | 2013-02-06 |
| KR20100044842A (ko) | 2010-04-30 |
| US20110041747A1 (en) | 2011-02-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5197749B2 (ja) | 空気力学的な風力推進装置およびその制御方法 | |
| US5788186A (en) | Helicopter load suspending apparatus | |
| JP4934023B2 (ja) | 風力船舶の自由に飛行する凧タイプの風を受ける要素の位置決めデバイス | |
| JP4691551B2 (ja) | 風力船舶での飛行する凧タイプの風を受ける要素の配置システム | |
| JP5896329B2 (ja) | 発電機を含むジャイログライダー装置 | |
| RU2576396C2 (ru) | Исполнительные системы для управления полетом силового профиля крыла для преобразования энергии ветра в электрическую или механическую энергию | |
| JP2009534254A (ja) | 駆動翼様部材を備える風力システム及び電気エネルギーを生成する方法 | |
| US9969502B2 (en) | In-flight refueling method and system for controlling motion of the hose and drogue | |
| DK2729357T3 (en) | Method and device for controlling a tethered flight element. | |
| JP4945752B2 (ja) | パラフォイルの飛行制御装置 | |
| US20110052391A1 (en) | Independent control of shortening lines in an aerodynamic wing | |
| KR101500898B1 (ko) | 케이블 제어형 카이팅 보트 | |
| US8607722B2 (en) | Aerodynamic wind propulsion device having active and passive steering lines and method for controlling of such a device | |
| US5044576A (en) | Parawing with an automatic canopy withdrawing mechanism | |
| EP2844552B1 (en) | Aerodynamic wind energy conversion device and method for controlling such a device | |
| US7048227B2 (en) | Parachute supported aircraft with controlled wing collapse and inflation | |
| EP0070673A2 (en) | Wind-propelled craft | |
| WO2022153369A1 (ja) | 移動体 | |
| EP2415671B1 (en) | Method and device for operations with in-flight refuelling boom | |
| US20220297837A1 (en) | Bridle for a vehicle | |
| KR20230157409A (ko) | 접는 라인을 파지하는 장치를 포함하는 테더형 날개 견인 시스템 | |
| JP2024510154A (ja) | 吹き流し式折り畳みを用いるキャプティブカイト牽引システム | |
| JP2024510151A (ja) | キャプティブ帆及び飛行式係留ラインに関わる運搬システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120703 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121003 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130108 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130205 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160215 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |