以下、図面を参照しつつ、本発明の実施形態を説明する。
まず、図23を参照して、前述した非特許文献1により提案されている磁歪式応力センサの構造および原理について説明する。
図23(A)において、201は永久磁石、202は磁気センサであり、中央に位置するコア203は磁歪を有している。永久磁石201の磁束は図示のように分布し、コア203を矢印で示すように磁化する。永久磁石201の磁束は、コア203をも通っている。
コア203に引張応力が働くと、永久磁石201の磁束がコア203をより多く通るようになるために、磁気センサ202を通過する磁束が減少する。一方、コア203に圧縮応力が作用すると、磁束はコア203を通り難くなるため、磁気センサ202を通過する磁束が増加する。このようにして、磁気センサ202からの信号の大きさはコア203に働く応力の大きさを反映することになる。
以上が提案されている磁歪式応力センサの原理である。磁束を発生させるのに電源がいらない点が特徴である。磁気センサ202の位置としては、図23(B)に示すように、AまたはBの位置でもよいことが述べられている。
引張応力と圧縮応力では、磁気センサ202の信号の変化の仕方は、圧縮の方が大きく、そのセンサの定格の範囲において、圧縮にて30から80%の変化があることがデータで示されている。
しかしながら、上記提案においては、パイプ状のコア203の中に円柱状のアルニコ磁石を配置し、パイプの表面に、リニアホールICを置いてデータが取られているものの、原理確認段階の域を出ないものである。応力を精度良く的確に検出して磁歪式応力センサの実用化を図るためには、コア203に作用する応力の方向と、永久磁石201の着磁方向との関係など、実装上の種々の問題点を解決することが重要である。
本発明の磁歪式応力センサにあっては、応力を精度良く的確に検出して実用化を図り得るように、以下のように構成されている。
(第1の実施形態)
図1(A)は、本発明の第1の実施形態に係る磁歪式応力センサ11の基本構成を示す断面図、図1(B)は、図1(A)の1B−1B線に沿う断面図、図1(C)は、図1(A)に示される磁歪式応力センサ11を、応力が作用する部材に取り付けた状態を示す断面図である。
図1(A)を参照して、磁歪式応力センサ11は、磁歪を有する磁性部材20と、磁性部材20に近接して配置された永久磁石30と、磁性部材20に対して永久磁石30と反対側における漏れ磁束を検知する磁気センサ40と、を備えている。磁性部材20に作用する応力に依存して漏れ磁束が変化するが、その漏れ磁束の変化を磁気センサ40によって検知することによって、磁性部材20に作用する応力を検出する。第1の実施形態の磁歪式応力センサ11にあっては、磁性部材20に作用する応力の方向(矢印21参照)と、永久磁石30の着磁方向(矢印31参照)とが、ほぼ直交している。
磁性部材20は、板形状を有し、歪を生じる起歪部22と、起歪部22の両端に設けられた一対の脚部23とを含んでいる。着磁方向に直交する永久磁石30の両端面32a、32bのうち一方の端面32aが起歪部22に向かい合っている。永久磁石30は、起歪部22に接した状態で配置されている。
図1(B)を参照して、磁性部材20は、応力の方向に対して直交する断面形状における両端部の厚みが中央部に比べて厚いフランジ部24が設けられている。
図1(C)を参照して、磁歪式応力センサ11は、磁性部材20の脚部23を介して、応力が作用する対象部材50に取り付けられている。応力が作用する対象部材50として、例えば、自動車の足回り部品を挙げることができる。脚部23を対象部材50に接合することにより、対象部材50に作用する応力を検知する。起歪部22は一対の脚部23を介して対象部材50に接合されるため、対象部材50の変形が不均一であっても、平均的な応力が、起歪部22に負荷される。脚部23と対象部材50との接合は、電子ビームによる溶接や、ロー付けなどの公知の接合方法を適宜採用することができる。
この磁歪式応力センサ11では、磁性部材20に作用する応力方向(矢印21)と、永久磁石30の着磁方向(矢印31)とがほぼ直交している。図23に示した従来提案されている磁歪式応力センサにあっては、磁性部材に作用する応力方向と、永久磁石の着磁方向とがほぼ平行である。この点において本実施形態の磁歪式応力センサ11は、従来例とは異なっている。本件の発明者らは、鋭意検討の結果、磁性部材20に作用する応力方向と永久磁石30の着磁方向とがほぼ直交するレイアウトにすることによって、安定かつ良好な特性が得られることを見出した。
すなわち、板状の磁性部材20の磁化は、永久磁石30の磁界によって拘束されているが、磁性部材20に圧縮力が働くと、磁歪の逆効果によって、板面に垂直な磁化が増え(磁歪が正の場合、負の場合は逆となる)、漏れ磁束が増えるものと考えられる。逆に、磁性部材20に引張力が働くと、板面に平行な磁化が増えるため、漏れ磁束が減ると解釈される。
磁性部材20に作用する応力方向と永久磁石30の着磁方向とがほぼ直交しており、磁性部材20に対して永久磁石30と反対側における漏れ磁束の、応力に依存する変化分を検知している。永久磁石30が発生している磁束のレベルに比べて、漏れ磁束のレベルが低くなっている。この状態で、応力に依存する変化分を磁気センサ40によって検知することになるので、磁性部材20に作用している応力を精度よく的確に検出することができる。
また、磁性部材20を板形状としたので、実応力が高くでき、部材に働く応力検知を感度よく行うことができる。
さらに、磁性部材20の応力方向に対する垂直な断面形状において、両端部の厚さが厚くなっているので、圧縮力が働いても板が座屈することがないから、板を薄くでき、圧縮の応力レベルを上げられることになる。したがって、引張力ばかりでなく圧縮力をも感度よく検知することができ、圧縮力にも高感度なセンサを得ることができる。
磁性部材20は、マルエージング鋼から形成することが好ましい。マルエージング鋼は高強度であるため、応力レベルを高くでき、十分な検出感度を得ることができるからである。また、同材を用いると、ヒステリシスのない良好なセンサ特性である磁歪式応力センサ11とすることができるからである。このように、マルエージング鋼の適用は、磁歪式応力センサ11のロバスト性、感度およびセンサ特性に関して好ましい。
磁性部材20は、18%Ni系のマルエージング鋼(18%Ni−9%Co−5%Mo−Fe)から形成することがより好ましい。18%Ni系のマルエージング鋼は磁歪が大きいからである。
さらに、磁性部材20は、18%Ni系のマルエージング鋼から形成され、時効処理されていることが好ましい。時効状態で使用すると、ヒステリシスのない良好なセンサ特性となるからである。
永久磁石30としては、サマリウムコバルト(SmCo)磁石が好適であるが、これに限定されるものではない。永久磁石は、磁束を発生させるための電源および巻き線が不要であり、省電力化、小型化およびコスト低減の点で好ましい。
漏れ磁束を検知する磁気センサ40としては、リニアホールICを用いることができる。省電力で小型であり、センサ特性が良好な磁歪式応力センサ11となるからである。
なお、本明細書において、「応力方向と着磁方向とがほぼ直交する」とは、図23の従来の磁歪式応力センサとの対比において用いた概念であり、応力方向と着磁方向とが厳密に直交する場合のほか、図23の磁歪式応力センサとの対比において応力を精度よく的確に検出できる範囲である限りにおいて、若干傾斜する場合も含まれると理解されなければならない。
図10〜図17を参照して、磁性部材220に作用する応力方向(矢印221)と永久磁石230の着磁方向(矢印231)との関係が、応力の検出に与える影響を説明する。
図10および図11は、磁性部材220に作用する応力方向と永久磁石230の着磁方向との関係が応力の検出に与える影響を調べた実験を説明するための説明図であり、図10は、磁性部材220に作用する応力方向と永久磁石230の着磁方向とがほぼ直交するように永久磁石230を配置した場合を示し、図11は、磁性部材220に作用する応力方向と永久磁石230の着磁方向とがほぼ平行となるように永久磁石230を配置した場合を示している。図10(A)および図11(A)は、実験装置の概略構成を示す説明図、図10(B)および図11(B)は、磁性部材220としての試験片220および試験片220の表面側に配置した永久磁石230を示す図、図10(C)および図11(C)は、試験片220の裏面側において磁束密度を測定する位置を示す説明図である。図12(A)(B)は、磁性部材220としての試験片220を示す斜視図および正面図、図13は、永久磁石230を示す斜視図である。
図10および図11を参照して、磁性部材220としての試験片220の表面に永久磁石230を付け、試験片220の裏面に磁束密度を測定するガウスメータのプローブ240を配置した。試験片220に引張応力を加え、試験片220の裏面にプローブ240を接触させながらスライドして、磁束密度を測定した。試験片220に圧縮応力を加えた場合も同様に測定した。図10に、試験片220に作用する応力方向に対して永久磁石230の着磁方向がほぼ直交するように、試験片220の表面に永久磁石230を付けた場合を示す。図11に、試験片220に作用する応力方向に対して永久磁石230の着磁方向がほぼ平行となるように、試験片220の表面に永久磁石230を付けた場合を示す。説明の便宜上、図10に示される永久磁石230の配置形態を「横置き」とも言い、図11に示される永久磁石230の配置形態を「縦置き」とも言う。
図12(A)(B)を参照して、試験片220は、マルエージング鋼(日立金属(株)製、商品名YAG300、18%Ni−9%Co−5%Mo−Fe)を用いて作製した。試験片220は、厚さt=2mm、平行部の幅W=14mm、平行部の長さP=31mm、肩部半径R=3mm、つかみ部の幅b=20mmである。試験片220を機械加工によって作製した後、固溶化および時効熱処理を施した。固溶化処理は真空中にて820℃×2時間保持し、その後、炉中にて室温まで冷却した。その後、時効処理は真空中にて490℃×5時間保持し、その後、炉中にて室温まで冷却した。
図13を参照して、永久磁石230として、円柱状の薄肉磁石を、軸方向に着磁して用いた。直径φ=10mm、長さL=7mmのSmCo磁石を用いた。着磁後の磁石単体での端面の磁束密度は約4kGであった。
ガウスメータには、F.W.BELL製のGauss/Tesla−Meter(型番Model−5080)を使用した。プローブ240は、F.W.BELL製のModel−5080用の薄型トランスバースプローブ(型番STB58−0201)を使用した。
図10(A)(C)および図11(A)(C)を参照して、試験片220の裏面にプローブ240を接触させながら矢印241にて示すようにスライドし、試験片220の板面に垂直方向の磁束密度を測定した。試験片220の裏面側において磁束密度を測定する位置は、平行部の幅方向の中央、かつ、平行部の中心点P0から図中上側に20mmの開始点P1から、平行部の幅方向の中央、かつ、平行部の中心点P0から図中下側に20mmの終了点P2まで、0.02mm単位とした。
試験片220に印加する荷重は、引張荷重および圧縮荷重はともに、700.00kgfとした。試験片220の平行部における幅方向の断面積は、28mm2である。引張応力および圧縮応力はともに、245MPaである。
図10に示したように永久磁石230を横置きした状態において、荷重を印加しないとき、引張荷重を印加したとき、圧縮荷重を印加したときのそれぞれにおいて、磁束密度を測定した。同様に、図11に示したように永久磁石230を縦置きした状態において、荷重を印加しないとき、引張荷重を印加したとき、圧縮荷重を印加したときのそれぞれにおいて、磁束密度を測定した。測定結果を、図14〜図17に示す。
図14は、試験片220に作用する応力方向と永久磁石230の着磁方向とがほぼ直交するように永久磁石230を配置(横置き)した状態において、引張荷重を印加したときの磁束密度の測定結果を示すグラフ、図15は、試験片220に作用する応力方向と永久磁石230の着磁方向とがほぼ直交するように永久磁石230を配置(横置き)した状態において、圧縮荷重を印加したときの磁束密度の測定結果を示すグラフである。図16は、試験片220に作用する応力方向と永久磁石230の着磁方向とがほぼ平行となるように永久磁石230を配置(縦置き)した状態において、引張荷重を印加したときの磁束密度の測定結果を示すグラフ、図17は、試験片220に作用する応力方向と永久磁石230の着磁方向とがほぼ平行となるように永久磁石230を配置(縦置き)した状態において、圧縮荷重を印加したときの磁束密度の測定結果を示すグラフである。
各グラフにおいて、横軸は、プローブ240の移動量(mm)を示している。開始点P1は−20mmの位置に相当し、平行部の中心点P0は0(ゼロ)mmの位置に相当し、終了点P2は+20mmの位置に相当する。縦軸は、磁束密度B[kG]である。各グラフにおいて、実線は、荷重を印加して測定した磁束密度を示し、破線は、荷重0(ゼロ)での磁束密度を示している。
図14および図16を参照して、試験片220に引張荷重を印加したときの磁束密度は、荷重0での磁束密度に比べて減少し、図15および図17を参照して、試験片220に圧縮荷重を印加したときの磁束密度は、荷重0での磁束密度に比べて増加した。図14および図15を参照して、平行部の中心点P0(0mm)の位置において、引張荷重で37Gの変化(減少)、圧縮荷重で55Gの変化(増加)であり、感度は引張荷重を印加したときの方が低かった。
図14および図15を参照して、永久磁石230を横置きした場合には、感度がほぼ一定のエリアがあった。感度がほぼ一定のエリアは、永久磁石230の直径(10mm)よりも若干小さかった。一方、図16および図17を参照して、永久磁石230を縦置きした場合には、感度の最大はピークとなって現れた。しかも、ピーク位置が荷重の大きさによってシフトした。例えば、図16に示されるように、引張荷重のときの感度のピーク位置は、荷重0のときの感度のピーク位置に比べて内側(開始点P1の反対側、および終了点P2の反対側)にシフトしていた。
磁歪式応力センサを構成する際には、磁気センサを配置して磁束密度を測定するセンシング位置を、感度の安定性が高い位置に特定する必要がある。永久磁石230を縦置きにした場合には、感度の最大がピークとなって現れ、しかも、感度のピーク位置が荷重の大きさによってシフトすることから、センシング位置を特定することが困難である。感度のピーク位置は本実験のようにして求めることは可能であるものの、磁歪式応力センサを量産したときには、製造ばらつきが大きくなる一要因となる。これに対して、永久磁石230を横置きにした場合には、感度がほぼ一定のエリアがあることから、センシング位置を簡単に特定することができる。すなわち、永久磁石230を横置きにする場合には、センシング位置を、永久磁石230の裏側の中心位置、あるいはその近傍に特定すればよい。また、感度のピーク位置を実験によって求める必要がなく、磁歪式応力センサを量産するときの製造ばらつきを抑えることも可能となる。
永久磁石230を縦置きにした場合には、感度のピーク位置が荷重の大きさによってシフトすることから、センサ出力の直線性が失われる。このため、磁歪式応力センサを構成する際には、感度のピーク位置が荷重の大きさによってシフトすることを補正しなければならず、回路あるいは制御プログラムの複雑化を招く虞がある。これに対して、永久磁石230を横置きにした場合には、感度がほぼ一定のエリアがあることから、荷重の大きさによってセンサ出力が直線的に変化する特性を得ることができ、回路あるいは制御プログラムが複雑化することがない。
永久磁石230を縦置きにした場合には、応力の影響を含まない、永久磁石230の磁束をモニタすることができない。このため、磁歪式応力センサの温度特性を確保するのが複雑、煩雑になってしまう。これに対して、永久磁石230を横置きにした場合には、永久磁石230の両極のうち磁性部材220に接しない側の極では応力の影響をダイレクトに受けないため、応力の影響のほとんどない磁石磁束のモニタが可能となる。このため、磁歪式応力センサの温度特性の確保が容易であるという利点もある。
磁歪式応力センサを構成する際には、ΔB/B0が大きい方が、センサ精度が高くなる。ここに、ΔBは、応力に依存する磁束密度の変化分、B0は、荷重0のときの磁束密度である。永久磁石230を縦置き、あるいは横置きにするいずれの場合においても、試験片220に対して永久磁石230と反対側における漏れ磁束を検知しているので、荷重0のときの磁束密度B0のレベルは低い。しかしながら、上述したように、永久磁石230を横置きにした場合には、縦置きにした場合に比べて、感度がほぼ一定のエリアがあり、センシング位置の特定が容易で、センサ出力が直線的に変化する特性を得ることができるという利点がある。したがって、永久磁石230を横置きにした場合には、縦置きにした場合に比べて、応力に依存する磁束密度の変化分ΔBを正確に検知することができ、その結果、応力を精度よく的確に検出できることがわかった。
永久磁石230を横置きする場合には、永久磁石230単体を小型化することができる。B0をある程度の大きさにしないと、ΔBも大きくできない。図14〜図17に示したように、B0は、横置きでは約150Gであり、縦置きでは約50Gである。一方、ΔBは、横置きでは約50Gであり、縦置きでは約25Gである。B0は漏れ磁束密度なので、磁石が磁歪材を飽和に近い状態に磁化する必要がある。そのためには、磁石の磁極端面が磁歪材に近い方が、有効に磁化することができる。磁石からの磁界は、磁極端面から離れると弱まるからである。永久磁石230を横置きする場合には小さな磁石で磁化できるが、縦置きで横置きと同じB0を得ようとすると、磁石を大きくする必要がある。したがって、永久磁石230を横置きする場合には、永久磁石230単体を本質的に小型化することができ、磁歪式応力センサの小型化を図ることができる。
また、磁歪式応力センサを構成する際、永久磁石230を横置きにした場合には、永久磁石230の両極のうち磁性部材220に接しない側の極に向かい合わせてヨークを簡単に配置することができる。永久磁石230にヨークを設けることによって、磁石のパーミアンスを上げることと等価になるため、パーミアンスが高い状態で永久磁石230を利用でき、安定した磁石特性を利用することができる。したがって、さらに薄い磁石を用いることができ、磁歪式応力センサの小型化を一層図るのに適したものとなる。
また、永久磁石230を横置きにする場合には、円盤状小磁石を使用することもできる。二次元方向で対称な特性、つまり、磁石端面に平行な面において対称な特性を得ることができるので、センサに適用して有効なものとなる。円盤状の磁石は、研摩加工などを行いやすく、容易に作製することができる。一方、永久磁石230を縦置きにする場合には、横置きにする場合に比べて、磁歪式応力センサの小型化を図ることがやや難しく、比較的長尺の磁石を要する。
(第2の実施形態)
図2は、本発明の第2の実施形態に係る磁歪式応力センサ12を示す断面図である。第1の実施形態と共通する部材には同一の符号を付し、その説明は一部省略する。
第2の実施形態に係る磁歪式応力センサ12は、永久磁石30にヨーク60を向かい合わせて配置した点において、第1の実施形態と相違する。
磁歪式応力センサ12には、着磁方向に直交する永久磁石30の両端面32a、32bのうち磁性部材20に向かい合う端面32aとは反対側の端面32bに向かい合って、磁性部材20と同じ材料から形成されたヨーク60が配置されている。ヨーク60は、永久磁石30の端面32bに接し、永久磁石30を覆うように設けられ、さらには、磁性部材20の起歪部22における歪を阻害することがないように配置されている。
永久磁石30にヨーク60を設けることによって、磁石のパーミアンスを上げることと等価になるため、パーミアンスが高い状態で永久磁石30を利用でき、安定した磁石特性を利用することができる。したがって、薄い磁石を用いることができ、磁歪式応力センサ12の小型化を図ることができる。また、磁性部材20と同じ材料からヨーク60を作製してあるので、後述するが、磁歪式応力センサ12における温度特性を確保できる。
永久磁石30の両端面32a、32bのうちの一方の端面32aが向かい合う部分における磁性部材20の厚みと、永久磁石30の両端面32a、32bのうちの他方の端面32bが向かい合う部分におけるヨーク60の厚みとが同じであることが好ましい。つまり、磁性部材20の起歪部22の厚みと、ヨーク60のうち起歪部22に向かい合う部分の厚みとが同じであることが好ましい。後述するが、磁歪式応力センサ12における温度特性を良好なものとすることができるからである。
(第3の実施形態)
図3は、本発明の第3の実施形態に係る磁歪式応力センサ13を示す断面図である。第1および第2の実施形態と共通する部材には同一の符号を付し、その説明は一部省略する。
第3の実施形態に係る磁歪式応力センサ13は、磁気センサ40とは別個に、永久磁石30の磁束を磁性部材20に作用する応力に依存しない状態においてモニタするセンサ45をさらに有している点において、第2の実施形態と相違する。
磁歪式応力センサ13は、第2の実施形態の磁歪式応力センサ12の構成に加えて、センサ45が、ヨーク60の外側に配置されている。センサ45により、永久磁石30の磁束を検知している。そして、磁気センサ40およびセンサ45の両者の出力を差動した出力をセンサ出力としている。追加配置するセンサ45も、磁気センサである。第2の実施形態と同様に、ヨーク60は、磁性部材20と同じ材料から形成されている。また、磁性部材20の起歪部22の厚みと、ヨーク60のうち起歪部22に向かい合う部分の厚みとが同じである。
応力を検知する磁気センサ40と、永久磁石30の磁束を応力に依存しない状態においてモニタする磁気センサ45との2つを設け、両者の出力を差動した出力を磁歪式応力センサ13の出力とすることによって、温度特性に優れた磁歪式応力センサ13とすることができる。すなわち、ヨーク60と起歪部22とが同じ材料、同じ厚さであるから、応力の印加がないときのアクティブな磁気センサ40の配置位置における漏れ磁束と、磁石磁束モニタ用のダミーの磁気センサ45の配置位置における漏れ磁束とを、ほぼ同じ大きさにすることができる。そして、アクティブな磁気センサ40とダミーの磁気センサ45とを差動させて、磁歪式応力センサ13の出力とすることによって、温度特性に優れた磁歪式応力センサ13とすることができる。
本発明の磁歪式応力センサの基本構成を採用することの最大のメリットは、永久磁石30の磁束を安定かつ、確実にモニタできることである。
従来提案されている図23(A)に示した磁歪式応力センサの構成にあっては、応力の影響を含まない、磁石の磁束をモニタすることができない。このため、磁歪式応力センサの温度特性を確保するのが複雑、煩雑になってしまうという課題を包含している。
一方、本発明の構成にあっては、応力の影響をダイレクトに受けないため、応力の影響のほとんどない、磁石磁束のモニタが可能であるので、磁歪式応力センサの温度特性の確保が容易であるという点で優れたものとなる。
(第4の実施形態)
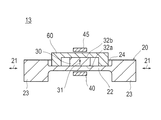
図4は、本発明の第4の実施形態に係る磁歪式応力センサ14を示す断面図である。第1〜第3の実施形態と共通する部材には同一の符号を付し、その説明は一部省略する。
第4の実施形態に係る磁歪式応力センサ14は、磁気センサ40にヨーク70を向かい合わせて配置した点において、第3の実施形態と相違する。
磁歪式応力センサ14は、第3の実施形態の磁歪式応力センサ13の構成に加えて、アクティブ側の磁気センサ40の両面40a、40bのうち磁性部材20に向かい合う面40aとは反対側の面40bに向かい合って、軟磁性材料から形成された磁気センサ40用のヨーク70が配置されている。ヨーク70は、磁気センサ40を覆うように設けられ、さらには、磁性部材20の起歪部22における歪を阻害することがないように配置されている。
軟磁性材料としては、保磁力が小さい材料である、電磁鋼板、電磁軟鉄、ソフトフェライト、パーマロイなどを用いることができる。
磁気センサ40にヨーク70を設けることによって、集磁効果があるので、磁歪式応力センサ14の感度を約倍程度に高めることができる。また、磁気センサ40の位置設定に対して磁気センサ特性が鈍感になるというメリットがある。さらに、外部からの磁界に対して、磁気センサ40をシールドすることになるから、外部磁界に対する耐性を向上させることができる。
図示例にあっては、ダミー側の磁気センサ45にも、ヨーク75を設けてある。ダミー側の磁気センサ45の両面45a、45bのうちヨーク60に向かい合う面45aとは反対側の面45bに向かい合って、磁気センサ45用のヨーク75が配置されている。ヨーク75も上述した軟磁性材料から形成されている。ヨーク75は、磁気センサ45を覆うように設けられている。このヨーク75も、ヨーク70と同様の機能を発揮する。
(第5の実施形態)
図5は、本発明の第5の実施形態に係る磁歪式応力センサ15を示す断面図である。第1〜第4の実施形態と共通する部材には同一の符号を付し、その説明は一部省略する。
第5の実施形態に係る磁歪式応力センサ15は、永久磁石35を磁性部材20およびヨーク60から離間させて配置した点において、第4の実施形態と相違する。先の第4の実施形態では、永久磁石30は、その両端面32a、32bのそれぞれが、磁性部材20の起歪部22と、ヨーク60とに接した状態で配置されている。
磁歪式応力センサ15は、非磁性材からなるスペーサ36を介して、永久磁石35を保持している。スペーサ36を介装することにより、永久磁石35は、磁性部材20およびヨーク60から離間して配置されている。このように永久磁石35を磁性部材20およびヨーク60に接触させて配置しなくとも、十分なセンサ特性を確保することができる。
(第6の実施形態)
図6および図7は、本発明の第6の実施形態に係る磁歪式応力センサ16を示す平面図および側面図、図8は、同磁歪式応力センサ16の温度補償回路を説明するためのブロック図である。
第6の実施形態に係る磁歪式応力センサ16は、軸力(軸方向の引張力および圧縮力)が作用する軸部材に適用した点において、第1〜第5の実施形態と相違する。
この磁歪式応力センサ16にあっては、磁性部材は、軸力が作用する軸部材102に軸方向と直交する方向に対をなすように隣り合うとともに作用する軸力により一方には引張応力が生じ他方には圧縮応力が生じるように設けられる第2磁性部材108(第1部材に相当する)と第3磁性部材109(第2部材に相当する)とを含んでいる。永久磁石113は、第2磁性部材108と第3磁性部材109との間に配置されている。磁気センサは、第2磁性部材108に対して永久磁石113と反対側に配置される磁気センサ104A(第1センサに相当する)と、第3磁性部材109に対して永久磁石113と反対側に配置される磁気センサ104B(第2センサに相当する)とを含んでいる。第2磁性部材108および第3磁性部材109に作用する軸力の方向と、永久磁石の着磁方向とを、ほぼ直交させている点は第1〜第5の実施形態と同様である。
第2磁性部材108および第3磁性部材109に作用する軸力方向と永久磁石の着磁方向とがほぼ直交しており、第1の実施形態と同様に、第2磁性部材108および第3磁性部材109に作用する軸力を精度よく的確に検出することができる。また、軸力方向と着磁方向とがほぼ直交するように永久磁石を配置してあるので、前述したように、永久磁石単体を本質的に小型化することができる。軸力方向と着磁方向とがほぼ平行となるように永久磁石を配置する場合に比べて、永久磁石の着磁方向に沿う寸法は着磁方向に対して直交する寸法よりも小さくてよいので、永久磁石を配置する第2磁性部材108と第3磁性部材109との間の寸法は小さくてよい。このため、軸部材102の限られた大きさの範囲内で、第2磁性部材108および第3磁性部材109の厚さ寸法を大きくでき、第2磁性部材108および第3磁性部材109の強度低下を招くことがなく、しかも、磁性体である第2磁性部材108および第3磁性部材10が厚くなるので、感度が低下することもない。以下、磁歪式応力センサ16を詳述するが、軸力が作用する軸部材に適用しているので、説明の便宜上、磁歪式軸力センサ16と称することとする。
第6の実施形態に係る磁歪式軸力センサ16は、被計測体である軸部材102に形成される折り返し部103と、折り返し部103に配置される永久磁石113および2つの磁気センサ104A、104Bと、磁気センサ104A、104Bからの出力信号A1、A2が入力されて磁歪式軸力センサとしてのセンサ出力を出力する回路部105と、温度センサ106とを有している。
軸部材102は、マルエージング鋼を機械加工することによって形成される。マルエージング鋼の適用は、磁歪式軸力センサ16のロバスト性、感度およびセンサ特性に関して好ましい。また、18%Ni系のマルエージング鋼は、磁歪が大きい点で好ましく、時効状態で使用するとヒステリシスのない良好な特性となるため、より好ましい。
軸部材102には、軸力(軸方向の引張力および圧縮力)が作用し、折り返し部103は、軸方向へ複数回折り返して形成されている。折り返し部103は、軸心に沿って対称形状の2つの第1折り返し部103Aと第2折り返し部103Bを有しており、本実施形態では、第1折り返し部103Aに永久磁石113および磁気センサ104A、104Bが設けられる。
第1折り返し部103Aは、軸部材102の外周側において軸方向の一方側から他方側へ軸方向に延びる第1磁性部材107と、第1磁性部材107の他方側の端部から折り返されて反対の軸方向へ延びる第2磁性部材108と、さらに第2磁性部材108の一方側の端部から折り返されて反対の軸方向へ延び、軸部材102の他方側に接続する第3磁性部材109とを有している。第1〜第3磁性部材107〜109は、それぞれ平行な板形状で形成される。板形状としたので、実応力が高くでき、部材に働く応力検知を感度よく行うことができる。
第1〜第3磁性部材107〜109は、磁性部材の並ぶ配列方向(板面の直交方向)および軸方向の両方向と直交する幅方向の幅長hが、軸直径Dよりも短い均一な長さで形成される。したがって、折り返し部103の幅方向の外側には、軸部材102から窪んだ2つの空間部114A、114Bが形成される。
第2折り返し部103Bは、第1折り返し部103Aと対称形状であるため、第1〜第3磁性部材107〜109と対称な第4〜第6磁性部材110〜112を有している。したがって、第1折り返し部103Aおよび第2折り返し部103Bには、全体で6枚(偶数枚)の磁性部材107〜112が形成される。
第1〜第6磁性部材107〜112は、例えばそれぞれの板厚dが1mmで形成される。なお第1磁性部材107と第6磁性部材112は、軸の外周面を形成するため部位によって板厚が異なり、例えば最も薄い部位の板厚が1mmで形成されるが、外周面が平面に加工されていてもよい。
永久磁石113は、第2磁性部材108と第3磁性部材109の間に配置され、第2磁性部材108および第3磁性部材109の永久磁石113が配置される面の反対面に、それぞれ磁気センサ104A、104Bが取り付けられる。永久磁石113の着磁方向は、第2磁性部材108および第3磁性部材109の永久磁石113と接する面と直交する方向(図6の上下方向)と一致し、第2磁性部材108および第3磁性部材109に生じる応力の方向(図6の左右方向)と直交している。なお、磁気センサ104A、104Bが取り付けられるそれぞれの磁性部材108、109は、磁性部材の板厚dおよび幅長hが等しく、軸方向と直交する面における断面積が等しいため、正負が逆で絶対値の等しい引張応力および圧縮応力が作用する。
第2磁性部材108および第3磁性部材109の板材の間に永久磁石113が配置されると、それぞれの磁性部材の永久磁石113が設けられる面と反対面(磁気センサ104A、104Bが設けられる面)において、漏れ磁束が生じる。
軸部材102に例えば引張力が作用すると、第1、第3板、第4および第6磁性部材107、109、110および112には引張応力が生じ、第2および第5磁性部材108、111には圧縮応力が生じる。逆に軸部材102に圧縮力が作用すると、第1、第3板、第4および第6磁性部材107、109、110および112には圧縮応力が生じ、第2および第5磁性部材108、111には引張応力が生じる。したがって、軸部材102に引張力または圧縮力のいずれが作用しても、軸方向と直交する方向に隣り合う対の磁性部材(本実施形態においては、第2磁性部材108と第3磁性部材109)において、引張応力と圧縮応力の両方が発生する。第2磁性部材108および第3磁性部材109に軸方向の応力が生じると、磁気センサ104A、104Bにおける漏れ磁束が逆磁歪の効果によって変化する。
例えば、引張応力が磁性部材108または109に負荷される場合、永久磁石113からの磁束は、磁性部材108または109を透過し易くなるため、漏れ磁束は減少する。一方、圧縮応力が磁性部材108または109に負荷される場合、永久磁石113からの磁束は、磁性部材108または109を透過し難くなるため、漏れ磁束は増加する。漏れ磁束の減少および増加は、磁気センサ104A、104Bによって検出することができる。
本実施形態に係る軸部材102は、2つの折り返し部103A、103Bが軸心に沿って対称形状で形成されるため、軸力が軸心を中心に釣り合い、軸部材102に曲がりが生じ難い構造となっている。
磁気センサ104A、104Bは、例えばリニアホールICであり、リニアホールIC104A、104Bからの出力信号A1、A2は、回路部105に入力される。回路部105には、磁歪式軸力センサ16における信号処理回路が一体的に形成されることが好ましい。
本実施形態では、リニアホールIC104A、104Bのそれぞれが引張応力、圧縮応力に対応した磁束変化を同時に検知するため、両者の信号を差動することにより略2倍の感度の信号が得られ、かつ良好な直線性が確保される。
温度センサ106は、リニアホールIC104A、104Bの近傍において、リニアホールIC104A、104Bが取り付けられた第2磁性部材108または第3磁性部材109に取り付けられる。なお、温度センサ106の取り付け位置は、逆磁歪が生じる部位の温度環境を計測できれば、特に限定されない。
回路部105は、軸部材102に形成される収容空間115に配置される。回路部105は、軸部材102の一部の空間に納めることができるため、プラグイン型の小型のセンサとすることができる。なお、回路部105の配置位置は、他の位置でもよく、例えば空間部114A、114Bに収めることもできる。
図8に示すように、温度センサ106により計測される温度によって、リニアホールIC104A、104Bへの供給電圧Vccを制御することにより、磁歪式軸力センサ16の温度補償を達成することができる。図のようにリニアホールIC104A、104Bからの出力信号A1、A2が差動回路16に入力され、差動回路16で差動された出力が、磁歪式軸力センサ16のセンサ出力である。
温度センサ106からの信号は、電圧制御部117へ入力され、温度センサ106からの信号に基づいて、リニアホールIC104A、104Bへの供給電圧Vccが制御される。リニアホールIC104A、104Bのゼロ点は差動により補償され、リニアホールIC104A、104Bの感度、永久磁石磁束の温度依存、逆磁歪の温度依存は供給電圧Vccの制御により、温度補償される。
温度補償を行うには、温度の異なる2点における感度が同じになるように、予め電圧制御部117を校正する必要がある。2点の温度の間は線形補間し、その外側では線形で外挿する。
図9は、磁歪式軸力センサの他の温度補償回路を説明するためのブロック図である。
図9に示すように、リニアホールIC104A、104Bの両出力A1、A2が加算回路119に入力され、リニアホールIC104A、104Bの出力A1、A2が加算された加算回路119からの信号が、電圧制御部118に入力される。電圧制御部118では、加算回路119からの信号(リニアホールIC104A、104Bの出力の和を表す信号)が常に一定に保たれるように、供給電圧Vccが制御される。
なお、リニアホールIC104A、104Bの出力信号A1、A2のゼロ点が0Vから外れている場合には、両リニアホールIC104A、104Bの感度分に相当する電圧の和が常に室温のときと同じになるように供給電圧Vccを制御することにより、より精度の高い感度補償ができる。リニアホールIC104A、104Bのゼロ点が(絶対値にて)0.1Vより大きい場合には、この方法が特に好適である。
上述のように、磁歪式軸力センサ16は、廉価であり、歪ゲージと比較してロバスト性が高い永久磁石113および磁気センサ104A、104Bを用いるため、磁歪式軸力センサ16自体もロバスト性が高く廉価で作製できる。
また、永久磁石113の着磁方向が、第2磁性部材108および第3磁性部材109の永久磁石113と接する面と直交する方向(図6の上下方向)と一致するため、センサ特性(感度)の良好な磁歪式軸力センサ16を実現できる。
以上説明してきたように、本発明の磁歪式応力センサによれば、省電力小型の磁歪式応力センサを実現できる。しかも、ロバスト性があり、温度特性も優れていることから、その有用性は飛躍的に向上している。
本発明は、上述した実施の形態に限定されるものではなく、特許請求の範囲の範囲内で種々改変することができる。
例えば、磁気センサ40、45は、リニアホールICに限定されず、省電力化および小型化の観点から、ホール素子やGMR(Giant Magneto Resistance Effect)センサを適用することも可能である。
磁性部材20には、マルエージング鋼に限定されず、例えば、良好な磁歪効果を有するFeAl合金(例えば、アルフェル)、FeCoV合金(例えば、パーメンジュール)、FeGa合金、FeGaAl合金(例えば、ガルフェノール)を適用することも可能である。
磁歪式軸力センサにあっては、必ずしも軸部材102の全体が磁性体である必要はなく、最低限、折り返し部103のリニアホールIC104A、104Bが取り付けられる部位およびその近傍が磁歪を有する磁性体であればよい。また、軸部材102の形状は円柱形状に限定されず、軸力が作用する部材であれば、磁歪式軸力センサ16を適用できる。折り返し部103における永久磁石113および磁気センサ104A、104Bの取り付け位置は、第2および第3磁性部材108、109に限定されず、第1および第2磁性部材107、108、第4および第5磁性部材110、111、または第5および第6磁性部材111、112であってもよい。取り付け位置が、これらの複数個所であってもよい。また、折り返し部3における折り返しの回数(磁性部材の数)が、説明した第6の実施形態と異なってもよい。
以下、本発明を実施例に基づいて具体的に説明する。なお、本発明は、これらの実施例のみに限定されるものではないことは言うまでもない。
(実施例1)
図18に示すように、磁歪を有する磁性部材20として、幅20mm、厚さ2mmのマルエージング鋼製の板部材を作製した。板部材は、マルエージング鋼(日立金属(株)製、商品名YAG300、18%Ni−9%Co−5%Mo−Fe)を用いて作製した。板部材を機械加工によって作製した後、固溶化および時効熱処理を施した。固溶化処理は真空中にて820℃×1時間保持し、その後、室温まで冷却した。その後、時効処理は真空中にて490℃×5時間保持し、その後、空冷した。
永久磁石30として、円柱状の薄肉磁石を、軸方向に着磁して用いた。直径φ10mm、長さ7mmのSmCo磁石を用いた。着磁後の磁石単体での端面の磁束密度は約4kGであった。
磁気センサ40として、ガウスメータの薄板プローブを用いた。磁気センサ40により、板面に垂直方向の磁束成分を検知した。磁気センサ40により、板部材の表面から約0.5mm付近の磁束を検知した。
図19に、板部材に圧縮荷重を印加したときの磁束密度の変化を示す。縦軸は、磁束密度の変化ΔB[G]であり、横軸は、板部材に加えられた圧縮荷重[kN]である。なお、荷重0での磁束密度は約150Gであった。図に示すような直線的で、ヒステリシスのない良好な特性が得られた。8kNの圧縮荷重(200MPa)で25Gの変化(増加)となっている。
板部材に引張荷重を印加したときにも、ほぼ同様な特性となっていた。ただし、8kNの引張荷重(200MPa)で20Gの変化(減少)であり、感度は引張荷重を印加したときの方が低かった。
磁気センサ40を前後左右に1mm動かした位置においても、まったく同じ特性となっていた。
引張および圧縮の磁歪式応力センサとして使用する場合に、引張状態と圧縮状態とでセンサの感度が異なると、不都合のように思われるが、回路的な補正は容易である。例えば、センサのゼロ点を2.5Vにする。そして、ゼロ点より大きな電圧信号のときは圧縮状態であると判定し、ゼロ点より低い電圧信号のときは引張状態であると判定して、感度補正を行うことによって、引張、圧縮ともに同じ感度のセンサとして機能させることができる。センサ出力の一例を図20に示す。V0はセンサのゼロ点であり、点線は、引張状態での感度補正を行わなかった場合を示し、実線は、感度補正を行った場合を示している。感度補正を行うことによって、引張、圧縮ともに同じ感度のセンサとして機能させることができることがわかった。
(実施例2)
図4に示される構成の磁歪式応力センサ14を製作した。
磁歪を有する磁性部材20は、マルエージング鋼(日立金属(株)製、商品名YAG300、18%Ni−9%Co−5%Mo−Fe)を用いて作製した。磁性部材20の板形状の起歪部22は、最小厚さ0.5mm、幅10mmであった。幅方向の両端に設けたフランジ部24は、幅1.5mm、厚さ1.5mmであった。磁性部材20を機械加工によって作製した後、固溶化および時効熱処理を施した。固溶化処理は真空中にて820℃×1時間保持し、その後、室温まで冷却した。その後、時効処理は真空中にて490℃×5時間保持し、その後、空冷した。
永久磁石30として、円柱状の薄肉磁石を、軸方向に着磁して用いた。直径φ3mm、長さ3.5mmのSmCo磁石を用いた。磁石は10Tのパルス磁界で着磁してから、200℃で1時間、熱枯らしを行った。着磁後の磁石単体での端面の磁束密度は約4.1kGであった。
磁気センサ40として、リニアホールICを用いた。磁気感度は約7mV/Gであった。
永久磁石30用のヨーク60も、マルエージング鋼を用いて作製した。ヨーク60の厚さは0.5mmとした。
磁気センサ40、45用のヨーク70、75は、PBパーマロイを用いて作製した。機械加工後、1200℃で2時間、純水素中にて熱処理を行った。
磁性部材20の脚部23を鋼製の板状部材(図1(C)の対象部材50に相当)に電子ビーム溶接にて接合した。
そして、板状部材に荷重を印加して試験したところ、ヒステリシスのない良好なセンサ特性が得られた。起歪部22にて応力換算したとき、図19と同様なレベルの信号が得られた(200MPaで25G)。また、温度特性も−30℃から100℃の範囲において良好であった。
(実施例3)
図5に示される構成の磁歪式応力センサ15を製作した。永久磁石の形状以外は実施例2と同様とした。
永久磁石35として、直径φ6mm、厚さ1.6mmのSmCo磁石を用いた。磁石単体での端面の磁束密度は約2.1kGであった。永久磁石35を非磁性材からなるスペーサ36を介して保持し、永久磁石35を、磁性部材20およびヨーク60から離間させて配置した。
磁気センサ40の位置おける磁界は200G程度であった。この実施例におけるセンサ感度は実施例2に対して約5割向上していた。永久磁石35を磁性部材20およびヨーク60に接触させて配置しなくとも、十分なセンサ特性を確保できることがわかった。
(実施例4)
図6および図7に示される構成の磁歪式軸力センサ16を製作した。
軸部材102および磁性部材107〜112は、マルエージング鋼(日立金属(株)製、商品名YAG300、18%Ni−9%Co−5%Mo−Fe)を用いて作製した。磁性部材107〜112の板厚dは1.0mmで、幅長hは10mmであった。磁性部材107〜112を機械加工によって作製した後、固溶化および時効熱処理を施した。固溶化処理は真空中にて820℃×1時間保持し、その後、室温まで冷却した。その後、時効処理は真空中にて490℃×5時間保持し、その後、空冷した。
永久磁石30として、円柱状の薄肉磁石を、軸方向に着磁して用いた。直径φ3mm、長さ3.5mmのSmCo磁石を用いた。磁石は10Tのパルス磁界で着磁してから、200℃で1時間、熱枯らしを行った。着磁後の磁石単体での端面の磁束密度は約4.1kGであった。
磁気センサ104A、104Bとして、リニアホールICを用いた。磁気感度は約7mV/Gであった。
図21は、実施例4における磁歪式軸力センサの感度の計測結果を示すグラフである。横軸の応力は、磁性部材の応力に換算している。図のように、応力200MPaあたり、45Gのセンサ出力(磁束の変化を差動した値)が得られた。これにより、センサ出力から応力値を換算できることが確認された。
(実施例5)
実施例4の磁歪式軸力センサ16の近傍に温度センサ106を設置し、温度センサ106からの信号に基づいて、リニアホールIC104A、104Bへの供給電圧であるVccを制御して温度補償を行った(図8参照)。具体的には、まず、室温で供給電圧を5.00Vに設定し、次に、センサ全体を100℃に昇温し、2つの条件におけるセンサ感度が同じになるような供給電圧Vccを出力できるように、校正値を設定した。次に、2点の温度(室温および100℃)の間の温度では線形補間し、その外側(室温未満および100℃超)では線形で外挿した校正値を設定した。
この後、温度を変化させつつ、温度信号をもとに供給電圧Vccを制御して、感度の計測を行った。
図22は、実施例5における磁歪式軸力センサの温度特性の計測結果を示すグラフである。縦軸の感度比は、センサ出力を20℃における値を基準として正規化した感度である。破線は供給電圧の制御無しの場合であり、実線は制御有りの場合である。図22に示すように、破線では温度変化によって感度比が変化するが、実線では温度が変化しても、感度は略一定となっており、−20℃から100℃の範囲において良好に感度の温度補償が行われていることが確認できた。