この発明の一実施の形態を、添付した図面を参照して説明する。
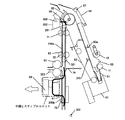
図1は、本実施の形態に係る用紙処理装置としての用紙後処理装置を主に示す全体構成図である。
この用紙後処理装置PDは、画像形成装置PRの側部に取り付けられている。本実施の形態では画像形成装置PRと用紙後処理装置PDで画像形成システム500が構成されている。画像形成装置PRより排出ローラ115を介して排出された用紙はガイド117で案内されて用紙後処理装置PDに導かれる。前記用紙は、1枚の用紙に後処理を施す後処理手段(実施の形態では穿孔手段としてパンチユニット)を有する搬送路Aを通り、上トレイ201へ導く搬送路B、シフトトレイ202へ導く搬送路C、用紙を積載して整合及びスティプル綴じ等を行う積載手段としての処理トレイFへ導く搬送路D、へそれぞれ分岐爪15及び分岐爪16によって振り分けられるように構成されている。
処理トレイFで整合及びスティプル等を施された用紙は、偏向手段である分岐ガイド板54と可動ガイド55によってシフトトレイ202へ導く搬送路C、折り等を施す処理トレイGへ振り分けられるように構成され、処理トレイGで折り等を施された用紙は搬送路Hを通り下トレイ203へ導かれる。
また、搬送路D内には分岐爪17が配置され、図示しない低荷重バネにより図の状態に保持されており、用紙後端がこれを通過した後、搬送ローラ9,10、スティプル排紙ローラ11のうち少なくとも搬送ローラ9を逆転することによって用紙後端を用紙収容部Eへ導いて用紙を滞留させ、次用紙と重ね合せて搬送することが可能なように構成されている。この動作を繰返すことで2枚以上の用紙を重ね合せて搬送することも可能である。
搬送路B、搬送路C及び搬送路Dの上流で各々に対し共通な搬送路Aには、画像形成装置PRから受け入れる用紙を検出する入口センサ301、その下流に入口ローラ1、パンチユニット100、搬送ローラ2、分岐爪15及び分岐爪16が順次配置されている。分岐爪15と分岐爪16は図示しないバネにより図1の状態に保持されており、図示しないソレノイドをオンすることにより、分岐爪15は上方に、分岐爪16は下方に、各々回動することによって、搬送路B、搬送路C、搬送路Dへ用紙を振り分ける。101はパンチかすホッパである。
すなわち、搬送路Bへ用紙を導く場合は、分岐爪15は図1の状態で前記ソレノイドをオフ、搬送路Cへ用紙を導く場合は、図1の状態から前記ソレノイドをオンすることにより、分岐爪15は上方に、分岐爪16は下方に、それぞれ回動した状態となり、搬送路Dへ用紙を導く場合は、分岐爪16は図1の状態で前記ソレノイドをオフ、分岐爪15は図1の状態から前記ソレノイドをオンすることにより、上方に回動した状態となる。
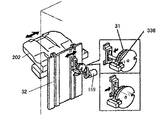
用紙後処理装置PDが有する用紙積載装置は、排出手段としてのシフト排紙ローラ6と、戻しコロ13と、シフトトレイ202と、図3に示すその昇降機構と、図2に示すシフト機構と、シフトトレイ202の紙面位置を検知する紙面位置検知手段としての紙面検知センサ330等により構成されている。
戻しコロ13は、スポンジ製からなり、シフト排紙ローラ6から排出された用紙と接して前記用紙の後端を図2で示すエンドフェンス32に突き当てて揃えるためのもので、シフト排紙ローラ6の回転力で回転するようになっている。戻しコロ13の近傍にはトレイ上昇リミットスイッチ333が設けられており、シフトトレイ202が上昇して戻しコロ13を押し上げると、トレイ上昇リミットスイッチ333がオンしてトレイ昇降モータ168が停止する。これによりシフトトレイ202のオーバーランが防止される。
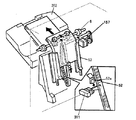
紙面検知センサ330は、図3に示すように紙面検知レバー30と、紙面検知センサ(スティプル用)330aと、紙面検知センサ(ノンスティプル用)330bとで構成されて、戻しコロ13の近傍に設けられている。紙面検知レバー30はその軸部を中心に回動可能に設けられており、シフトトレイ202に積載された用紙の後端上面に接触する接触部30aと扇形の遮蔽部30bを有している。上方に位置する紙面検知センサ330aは主にスティプル排紙制御に用いられ、紙面検知センサ330bは主にシフト排紙制御に用いられる。本実施の形態では、遮蔽部30bによって遮られたときに紙面検知センサ330aと紙面検知センサ330bがオンするようになっている。したがって、シフトトレイ202が上昇して紙面検知レバー30の接触部30aが上方に回動すると、紙面検知センサ330aがオフし、更に回動すると紙面検知センサ330bがオンする。用紙の積載量が所定の高さに達したことが紙面検知センサ330aと紙面検知センサ330bによって検知されると、シフトトレイ202は所定量下降される。これにより、シフトトレイ202の紙面位置は略一定に保たれる。
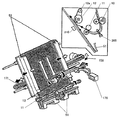
シフトトレイ202の昇降機構をさらに詳細説明する。図3に示すようにシフトトレイ202は駆動軸21が図示しない駆動ユニットで駆動されることにより昇降する。駆動軸21と従動軸22との間にはタイミングプーリを介してタイミングベルト23がテンションをもって掛けられている。このタイミングベルト23にシフトトレイ202を支持する側板24が固定されており、かかる構成によってシフトトレイ202を含むユニットが昇降可能に吊り下げられている。シフトトレイ202を上下方向に移動させる駆動源としての正逆転可能なトレイ昇降モータ168で発生した動力がウォームギヤ25を介して駆動軸21に固定されたギヤ列の最終ギヤに伝達される。ウォームギヤ25を介しているため、シフトトレイ202を一定位置に保持することができ、シフトトレイ202の不意の落下事故等を防止することができる。シフトトレイ202の側板24には、遮蔽板24aが一体に形成されており、下方には積載用紙の満載を検出する満杯検知センサ334と下限位置を検出する下限センサ335が配置され、遮蔽板24aによって満杯検知センサ334と下限センサ335とがオン、オフされる。満杯検知センサ334と下限センサ335はフォトセンサであり、遮蔽板24aによって遮られたときにオンする。なお、図3においては、シフト排紙ローラ6は省略している。
シフトトレイ202のシフト(揺動)機構は図2に示すように、シフトモータ169を駆動源にシフトカム31を回転させる。そのシフトカム31には回転軸中心から一定量離れた位置にピンが立っており、そのピンと、シフトトレイ202上の積載紙の後端をガイドし用紙排紙方向と直交方向に嵌合されているエンドフェンス32の長穴部とは嵌合しており、シフトカム31の回転により前記ピンと嵌合しているエンドフェンス32は用紙排紙方向と直交方向に移動し、それに伴いシフトトレイ202も移動する。前記シフトトレイ202は手前と奥の2つの位置で停止し、その停止位置はシフトセンサ336により検出されシフトモータ169のオン、オフによりなされる。
図1及び図4に示すように、シフト排紙ローラ6は、駆動ローラ6aと従動ローラ6bを有し、従動ローラ6bは用紙排出方向上流側において、上下方向に回動自在に設けられた開閉ガイド板33の自由端部に回転自在に支持されている。従動ローラ6bは自重又は付勢力により駆動ローラ6aに当接し、用紙は両ローラ間に挟持されて排出される。綴じ処理された用紙束が排出されるときは、開閉ガイド板33が上方に回動され、所定のタイミングで戻されるようになっており、このタイミングはシフト排紙センサ303の検知信号に基づいて決定される。その停止位置は排紙ガイド板開閉センサ331の検知信号に基づいて決定され、排紙ガイド板開閉モータ167により駆動される。332は排紙ガイド板開閉リミットスイッチである。
スティプル処理を施す処理トレイFの構成を説明する。図6に示すように、スティプル排紙ローラ11により処理トレイFへ導かれた用紙は、順次積載される。この場合、用紙ごとに叩きコロ12で縦方向(用紙搬送方向)の整合が行われるとともに、ジョガーフェンス53にて横方向(用紙搬送方向と直交する用紙幅方向)の整合が行われる。その後、ジョブの切れ目、すなわち、用紙束Pの最終紙から次の用紙束先頭紙までの間で、図17に示す制御手段350からのスティプル信号により端面綴じ手段としての端面綴じスティプラS1が駆動され、綴じ処理が行われる。綴じ処理が行われた用紙束Pは、図7に示すように直ちに放出爪52aを有する放出ベルト52によりシフト排紙ローラ6へ送られ、受取り位置にセットされているシフトトレイ202に排出される。
放出爪52aは、図7に示すように、放出ベルトHPセンサ311によりそのホームポジションが検知されるようになっており、この放出ベルトHPセンサ311は放出ベルト52に設けられた放出爪52aによりオン、オフする。この放出ベルト52の外周上には対向する位置に2つの放出爪52aが配置されており、処理トレイFに収容された用紙束Pを交互に移動搬送する。また、必要に応じて放出ベルト52を逆回転し、これから用紙束Pを移動するように待機している放出爪52aと対向側の放出爪52aの背面で、処理トレイFに収容された用紙束Pの搬送方向先端を揃えてもよい。放出ベルト52と放出爪52aは整合された用紙束Pを積載手段から移動させる移動手段を構成している。
また、図5に示すように、放出モータ157により駆動される放出ベルト52の駆動軸には、用紙幅方向整合中心に放出ベルト52とその駆動プーリ62とが配置され、それに対して左右対称に複数の放出ローラ56が配置されており、これら放出ローラ56の周速は放出ベルト52の周速より速くなるように設定されている。
図6に示すように、叩きコロ12は支点12aを中心に叩きソレノイド170によって振り子運動を与えられ、処理トレイFへ送り込まれた用紙に間欠的に作用して用紙を後端フェンス51に突き当てる。なお、叩きコロ12は反時計回りに回転される。
ジョガーフェンス53は、正逆転可能なジョガーモータ158によりタイミングベルト171を介して駆動され、用紙幅方向に往復移動する。後端フェンス51とジョガーフェンス53は用紙を整合する整合手段を構成している。
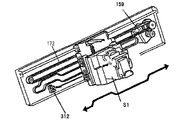
端面綴じスティプラS1は、図8に示すように、正逆転可能なスティプラ移動モータ159によりタイミングベルト172を介して駆動され、用紙端部の所定位置を綴じるために用紙幅方向に移動する。その移動範囲の一側端には、端面綴じスティプラS1のホームポジションを検出するスティプラ移動HPセンサ312が設けられており、用紙幅方向の綴じ位置は、前記ホームポジションからの端面綴じスティプラS1の移動量により制御される。
用紙偏向手段としての分岐ガイド板54と可動ガイド55の構成を説明する。図10に示すように、分岐ガイド板54は支点54aを中心に上下方向に回動自在に設けられ、その下流側に回転自在な加圧コロ57を有しており、スプリング58により放出ローラ56に加圧される。また、分岐ガイド板54の位置は、束分岐駆動モータ161より駆動を得て回転するカム61のカム面61aとの当接位置によって規定される。
一方、可動ガイド55は放出ローラ56の回転軸に揺動自在に支持され、可動ガイド55の一端(分岐ガイド板54とは反対側の端部)には連結軸60aで回動自在に連結されたリンクアーム60が設けられている。リンクアーム60は図5に示す前側板64aに固定された軸と長穴部60bで嵌合されており、これにより可動ガイド55の回動範囲は規制される。また、スプリング59により下方に付勢されることによって、図10(A)の位置に保持される。さらに、束分岐駆動モータ161より駆動を得て回転するカム61のカム面61bによりリンクアーム60が押されると、連結されている可動ガイド55は上方へ回動する。束分岐ガイドHPセンサ315はカム61の遮蔽部61cを検知して、カムのホームポジションを検知する。これにより、カム61はそのホームポジションを基準として束分岐駆動モータ161の駆動パルスをカウントすることによりその停止位置の制御が行われる。
図10(A)は、カム61がホームポジション時の分岐ガイド板54と可動ガイド55の位置関係を示す動作説明図である。可動ガイド55のガイド面55aはシフト排紙ローラ6への経路において、用紙をガイドする機能を有している。
図10(B)は、カム61が回転することにより、分岐ガイド板54が支点54aを中心として反時計方向(下方)へ回動し、加圧コロ57が放出ローラ56に加圧している状態を示す動作説明図である。
図10(C)は、カム61が更に回転することにより、可動ガイド55が図において時計方向(上方)に回動し、処理トレイFから処理トレイGに導く経路を、分岐ガイド板54と可動ガイド55とで形成した状態を示す動作説明図である。また、図5には奥行き方向の位置関係を示す。
本実施の形態では、分岐ガイド板54と可動ガイド55は1つの駆動モータにより動作するようにしたが、ほかに個々に駆動モータを設けて、用紙サイズや綴じ枚数に応じて、移動タイミングや停止位置を制御可能に構成してもよい。
折りプレート74の移動機構を説明する。図11に示すように折りプレート74は前後側板64a,64bに立てられた各2本の軸64cに長穴部74aを遊嵌することにより支持され、さらに折りプレート74から立設された軸部74bがリンクアーム76の一端側に形成された長穴部76bに遊嵌され、リンクアーム76が支点76aを中心に揺動することにより、折りプレート74は図11で左右に往復移動する。すなわち、リンクアーム76の他端側に形成された長穴部76cに折りプレート駆動カム75の軸部75bが遊嵌されており、折りプレート駆動カム75の回転運動によりリンクアーム76は揺動し、これに応じて、図12において、折りプレート74は束搬送ガイド板下上91,92に対して垂直な方向に往復動する。折りプレート74と折りローラ81は用紙束Pに中折りを施す中折り手段を構成している。
折りプレート駆動カム75は折りプレート駆動モータ166により図11で矢印方向に回転する。その停止位置は半月形状の遮蔽部75aの両端部を折りプレートHPセンサ325により検知することで決定される。
図11(A)は、処理トレイGの用紙束収容領域から完全に退避したホームポジション位置を示す。折りプレート駆動カム75を矢印方向に回転させると、折りプレート74は矢印方向に移動し、処理トレイGの用紙束収容領域に突出する。図11(B)は、処理トレイGの用紙束中央を折りローラ81のニップに押し込む位置を示す。折りプレート駆動カム75を矢印方向に回転させると、折りプレート74は矢印方向に移動し、処理トレイGの用紙束収容領域から退避する。
前記の制御を司る制御手段350は、図17に示すように、CPU360、I/Oインターフェース370等を有するマイクロコンピュータからなり、複写機やプリンタなどの画像形成装置PRのコントロールパネルの各スイッチ等、及び紙面検知センサ330等の各センサからの信号がI/Oインターフェース370を介してCPU360へ入力される。
CPU360は、入力された信号に基づいて、シフトトレイ202用のトレイ昇降モータ168、開閉ガイド板33を開閉する排紙ガイド板開閉モータ167、シフトトレイ202を移動するシフトモータ169、叩きコロ12を駆動する図示しない叩きコロモータ、叩きソレノイド170等の各ソレノイド、各搬送ローラを駆動する搬送モータ、各排紙ローラを駆動する排紙モータ、放出ベルト52を駆動する放出モータ157、端面綴じスティプラS1を移動するスティプラ移動モータ159、端面綴じスティプラS1を斜めに回転する図9に示す斜めモータ160、ジョガーフェンス53を移動するジョガーモータ158、分岐ガイド板54及び可動ガイド55を回動する束分岐駆動モータ161、その束を搬送する搬送ローラを駆動する図示しない束搬送モータ、可動後端フェンス73を移動する図示しない後端フェンス移動モータ、折りプレート74を移動する折りプレート駆動モータ166、折りローラ81を駆動する図示しない折りローラ駆動モータ等の駆動を制御する。
スティプル排紙ローラ11を駆動する図示しないスティプル搬送モータのパルス信号はCPU360に入力されてカウントされ、このカウントに応じて叩きソレノイド170及びジョガーモータ158が制御される。またパンチユニット100もクラッチやモータを制御することによりCPU360の指示によって穴明けを実行する。
図1において、8はプレスタックローラ、91は束搬送ガイド板下、92は束搬送ガイド板上、501は用紙押えアーム、501aは回転支点、505は積載量検知センサ、321は中綴じ部用紙検知センサ、252は後端叩き爪駆動ベルト、304は用紙逆転センサである。図5において、51aは基準フェンス前、51bは基準フェンス奥、66はガイドロッド、67は引っ張りスプリング、53aはジョガーフェンス前、53bはジョガーフェンス後である。図9において313は回転検知センサである。
次に、前記CPU360によって実行される本実施の形態に係る用紙後処理装置PDの動作について説明する。
本実施の形態では、後処理モードに応じて次のような排出形態をとる。すなわち、(1)搬送路Aと搬送路Bを経て上トレイ201へ排出されるノンスティプルモードaと、(2)搬送路Aと搬送路Cを経てシフトトレイ202へ排出されるノンスティプルモードbと、(3)搬送路Aと搬送路Cを経てシフトトレイ202へ排出される(その際、シフトトレイ202が、部の区切れ毎に排紙方向と直交方向に揺動することで排出される用紙は仕分けられる)ソート・スタックモードと、(4)搬送路Aと搬送路Dを経て処理トレイFで整合及び綴じを施され、搬送路Cを経てシフトトレイ202へ排出されるスティプルモードと、(5)搬送路Aと搬送路Dを経て処理トレイFで整合及び中央綴じを施され、更に処理トレイGで中央折りを施され、搬送路Hを経て下トレイ203へ排出される中綴じ製本モードとがある。以下に各モードの動作について説明する。
(1)ノンスティプルモードaの動作
搬送路Aから分岐爪15で振り分けられた用紙は、搬送路Bに導かれ、搬送ローラ3と上排紙ローラ4によって上トレイ201へ排出される。また、上排紙ローラ4の近傍に配置され用紙の排出を検出する上排紙センサ302によって排紙の状態を監視する。
(2)ノンスティプルモードbの動作
搬送路Aから分岐爪15と分岐爪16で振り分けられた用紙は、搬送路Cに導かれ、搬送ローラ5とシフト排紙ローラ6によってシフトトレイ202へ排出される。また、シフト排紙ローラ6の近傍に配置され用紙の排出を検出するシフト排紙センサ303によって排紙の状態を監視する。
(3)ソート・スタックモードの動作
前記(2)のノンスティプルモードb時と同様の搬送排紙を行う。その際、シフトトレイ202が、部の区切れ毎に排紙方向と直交方向に揺動することで排出される用紙は仕分けられる。
(4)スティプルモードの動作
搬送路Aから分岐爪15と分岐爪16で振り分けられた用紙は、搬送路Dに導かれ、搬送ローラ7、搬送ローラ9、搬送ローラ10及びスティプル排紙ローラ11により処理トレイFに排出される。処理トレイFでは、排紙ローラ11により順次排出される用紙を整合し、所定枚数に達すると端面綴じスティプラS1により綴じ処理を行う。その後、綴じられた用紙束Pは放出ベルト52の放出爪52aにより下流へ搬送され、シフト排紙ローラ6によりシフトトレイ202へ排出される。また、シフト排紙ローラ6の近傍に配置され用紙の排出を検出するシフト排紙センサ303によって排紙の状態を監視する。
スティプルモード時の処理トレイFの動作について説明する。スティプルモードが選択されると、図6に示すように、ジョガーフェンス53はホームポジションより移動し、処理トレイFに排出される用紙幅より片側7mm離れた待機位置で待機する。用紙がスティプル排紙ローラ11によって搬送され、用紙後端がスティプル排紙センサ305を通過すると、ジョガーフェンス53が待機位置から5mm内側に移動して停止する。
また、スティプル排紙センサ305は用紙後端通過時点にそれを検知し、その信号がCPU360に入力される。CPU360ではこの信号の受信時点からスティプル排紙ローラ11を駆動する図示しないスティプル搬送モータからの発信パルス数をカウントし、所定パルス発信後に叩きソレノイド170をオンさせる。叩きコロ12は、叩きソレノイド170のオン・オフにより振り子運動をし、オン時には用紙を叩いて下方向に戻し、後端フェンス51に突き当てて紙揃えを行う。このとき、処理トレイFに収容される用紙が入口センサ101あるいはスティプル排紙センサ305を通過するたびにその信号がCPU360に入力され、用紙枚数がカウントされる。
叩きソレノイド170がオフされて所定時間経過後、ジョガーフェンス53は、ジョガーモータ158によってさらに2.6mm内側に移動して一旦停止し、横揃えが終了する。ジョガーフェンス53はその後7.6mm外側に移動して待機位置に戻り、次の用紙を待つ。そして、この動作を最終頁まで行う。その後再び7mm内側に移動して停止し、用紙束Pの両側端を押えてスティプル動作に備える。その後、所定時間後に図示しないスティプルモータにより端面綴じスティプラS1が作動し、綴じ処理が行われる。このとき2ヶ所以上の綴じが指定されていれば、1ヶ所の綴じ処理が終了した後、図8に示すスティプル移動モータ159が駆動され、端面綴じスティプラS1が用紙後端に沿って適正位置まで移動され、2ヶ所目の綴じ処理が行なわれる。また、3ヶ所目以降が指定されている場合は、これを繰返す。
綴じ処理が終了すると、図7に示すように放出モータ157が駆動され、放出ベルト52が駆動される。このとき、図示しない排紙モータも駆動され、放出爪52aにより持ち上げられた用紙束Pを受け入れるべくシフト排紙ローラ6が回転し始める。このとき、ジョガーフェンス53は用紙サイズ及び綴じ枚数により異なるように制御される。例えば、綴じ枚数が設定枚数より少ない、あるいは設定サイズより小さい場合には、ジョガーフェンス53により用紙束Pを押えながら放出爪52aにより用紙束Pの後端を引っかけ搬送する。
そして、紙有無センサ310あるいは放出ベルトHPセンサ311による検知より所定パルス後にジョガーフェンス53を2mm退避させ、ジョガーフェンス53による用紙への拘束を解除する。この所定パルスは、放出爪52aが用紙後端と接触してからジョガーフェンス53の先端を抜ける間で設定されている。
また綴じ枚数が設定枚数より多い、あるいは設定サイズより大きい場合には、予めジョガーフェンス53を2mm退避させ、放出を行う。いずれの場合も用紙束Pがジョガーフェンス53を抜けきると、ジョガーフェンス53は、更に5mm外側に移動して待機位置に復帰し、次の用紙に備える。なお、用紙に対するジョガーフェンス53の距離により拘束力を調整することも可能である。
(5)中綴じ製本モードの動作
搬送路Aから分岐爪15と分岐爪16で振り分けられた用紙は、搬送路Dに導かれ、搬送ローラ7、搬送ローラ9、搬送ローラ10及びスティプル排紙ローラ11により処理トレイFに排出される。処理トレイFでは、前記(4)のスティプルモード時と同様に排紙ローラ11により順次排出される用紙を整合し、スティプルする直前までは同様の動作をする(図13(A)参照)。
用紙束が処理トレイFで仮整合された後、図13(B),(C)に示すように、用紙束Pの先端部は放出ローラ56と加圧コロ57により挟持され、分岐ガイド板54と可動ガイド55とが回動することで処理トレイGへ導かれる経路を通過するべく、再度放出爪52aと放出ローラ56により下流へ搬送される。この放出ローラ56は放出ベルト52の駆動軸に設けられており放出ベルト52と同期して駆動される。
その後、放出ローラ56を用紙束Pの後端が通過するまで放出爪52aによって運ばれ、さらに図13(D)の位置まで束搬送ローラ上71と束搬送ローラ下72によって搬送される。そのとき、各用紙束Pの搬送方向のサイズに応じて可動後端フェンス73の停止位置が異なって待機している。待機している可動後端フェンス73に用紙束Pの先端が当接してスタックされたとき、図14(A)のように束搬送ローラ下72の圧が解除され、後端叩き爪251により用紙束の後端を叩いて搬送方向の最終的な揃えを行う(処理トレイFで仮整合された用紙束Pが可動後端フェンス73にスタックされるまでに用紙束にズレが発生している可能性があるため、最終的な揃えを後端叩き爪251で行う必要がある)。そして、その直後に中綴じ上ジョガーフェンス250aと中綴じ下ジョガーフェンス250bによって幅方向の最終的な揃えが行われ、その中央を中綴じスティプラS2により綴じ処理する。中綴じスティプラS2と後記中綴じスティプルユニットは中綴じ手段を構成している。
ここで、可動後端フェンス73は可動後端フェンスHPセンサ322からのパルス制御により位置決めされていて、後端叩き爪251は後端叩き爪HPセンサ326からのパルス制御により位置決めされている。
図14(B)に示すように、中綴じされた用紙束Pは束搬送ローラ下72の加圧が解除されたまま、可動後端フェンス73の移動に伴って上方に運ばれ、その後、図14(C)に示すように、綴じられた針部近傍は略直角方向に折りプレート74により押され、その対向する折りローラ81のニップへと導かれる。予め回転していた折りローラ81はその用紙束Pを加圧搬送することで、用紙束Pの中央に折りを施す。ここで、中綴じされた用紙束Pは折り処理のために上方に移動するため、可動後端フェンス73の移動のみで確実に用紙束Pを搬送することができる。仮に折り処理のために下方に移動させようとすると、可動後端フェンス73の移動のみでは確実性に乏しくなり、搬送ローラ等の別の手段を要することになり、構成的にも複雑になる。
図14(D)に示すように、折りを施された用紙束Pは第2の折りローラ82により折りぐせを強化され、下排紙ローラ83により下トレイ203へ排出される。このとき、用紙束Pの後端が折り部通過センサ323に検知されると、折りプレート74と可動後端フェンス73はホームポジションに復帰し、束搬送ローラ下72の加圧は復帰され、次の用紙に備える。また、次のジョブが同用紙サイズ同枚数であれば、可動後端フェンス73は再び図13(D)の位置に移動して待機してもよい。
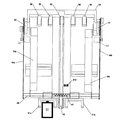
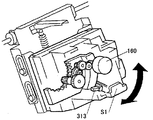
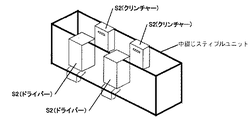
図15に示すように、中綴じスティプラS2を2セット、フレームに組み込んだ中綴じスティプルユニットが交換単位のユニットとなっており、このユニットが、図16のように用紙後処理装置PDに組み込んである。図の矢印方向にユニットを装置本体から外すと、中綴じスティプラS2に噛み込んでいる用紙束Pもそのまま図のように取り出される。これにより、別のユニットを差し込めば用紙後処理装置PDは復旧し、通常の使用が可能となる。また、取り出した故障中のユニットは慌てず時間をかけて修理することが可能である。このユニットの取り外しは、例えば装置本体の側板等に明けた開口から外部に取り出すことにより行う。さらにまた、本実施の形態では、図示省略したが、画像形成装置PRで画像形成された用紙に対して、中綴じを施す中綴じモードと、端面綴じを施す端面綴じモードとが設定されており、これら両モードが綴じモード選択手段としての画像形成装置PRの図示しない操作部やPCの印刷ドライバーにて選択することが可能である。
また、中綴じスティプルユニットは、前記のような矢印方向の機械的脱着と同時にその電気的接続が図示しないドロワーコネクタにより切断可能になっている。さらに、中綴じ手段検知手段としての図示しない中綴じスティプルユニット検知手段は、図の矢印方向にオン、オフするセンサ及びスイッチやコネクターセット時の短絡による検知などのいずれかを選択し取り付けてある。
前記実施の形態は好ましい一例を示したにすぎず、中綴じ手段や中折り手段としては図示したもの以外のものでもよく、例えば図示では用紙束Pを垂直向きに搬送し、中綴じスティプルユニットを含む中綴じ手段をこれに対して略垂直方向である水平向きに着脱するようにしたが、用紙束Pを水平向きに搬送し、中綴じ手段をこれに対して垂直向きに着脱するようにしてもよいし、あるいはこれの中間位置である所定の斜め向きに着脱するようにしてもよい。そのほかにも実際の実施に際しては特許請求の範囲に記載した技術的事項の範囲内で種々の変更、修正した形で行うことができることはいうまでもない。
本実施の形態によれば、中綴じスティプルユニットは、中綴じ位置にある用紙束の紙面に対して略垂直方向に装置本体から着脱可能であるので、噛みこんでいる用紙束ごとユニットを取り外すことが可能である。したがって、修理が容易であり、また別のユニットをセットすれば、装置自体は復旧するので、ユーザーはすぐに装置を使用でき大変便利であるという、従来にない優れた効果が期待できる。また、本実施の形態によれば、折りプレート74と折りローラ81を備えているので、整合された用紙束に対し端面綴じ処理を行ったり、あるいは中綴じした用紙束に中折り処理を行ったりすることが可能となる。しかも、それぞれの処理を行う少なくとも折りプレート74等が用紙処理ユニットとして1つに一体的に構成されているので、コンパクトであり、操作性がよい。また前記用紙処理ユニットは、用紙束の幅方向に引き出し可能に設けられ、かつ、中綴じスティプルユニットは、前記用紙処理ユニットに着脱可能に取り付けられているので、用紙中綴じ処理前に端面綴じした用紙束を中綴じスティプルユニット側に偏向したり、排出手段側に偏向したりすることが可能になるとともに、中綴じ処理しない形での処理も可能で、用紙の処理範囲が広くなる。
また、本実施の形態によれば、中綴じスティプルユニットが前記装置本体から取り外されている又は正常に前記装置本体に装着されていないことを検知する中綴じスティプルユニット検知手段を有するので、着脱時に不具合があったり、中綴じスティプルユニットが無い状態を検出できるため、未然にジャムの発生を防止することができる。
さらに、本実施の形態によれば、用紙処理装置と画像形成装置とからなるので、交換修理等で中綴じスティプルユニットが無い状態の場合は、中綴じに関連する処理のみ受け付けないようにし、装置に端綴じやシフトなどの処理機能があった場合は、その機能は通常に受け付けるように制御する。これにより、修理を待たずに、中綴じをしないユーザーにとっては常に装置を使用できる状態を提供でき不便さを与えずに済む利点がある。また、用紙処理装置と画像形成装置の融合が可能となり、複合機としての実用性がさらに高まる。