JP5115624B2 - 電磁サスペンションシステム - Google Patents
電磁サスペンションシステム Download PDFInfo
- Publication number
- JP5115624B2 JP5115624B2 JP2010509614A JP2010509614A JP5115624B2 JP 5115624 B2 JP5115624 B2 JP 5115624B2 JP 2010509614 A JP2010509614 A JP 2010509614A JP 2010509614 A JP2010509614 A JP 2010509614A JP 5115624 B2 JP5115624 B2 JP 5115624B2
- Authority
- JP
- Japan
- Prior art keywords
- value
- performance
- amount
- expansion
- contraction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000000725 suspension Substances 0.000 title claims description 185
- 239000006096 absorbing agent Substances 0.000 claims description 236
- 230000008859 change Effects 0.000 claims description 199
- 230000008602 contraction Effects 0.000 claims description 189
- 230000035939 shock Effects 0.000 claims description 130
- 230000033001 locomotion Effects 0.000 claims description 113
- 238000001514 detection method Methods 0.000 claims description 72
- 238000007689 inspection Methods 0.000 claims description 8
- 230000009467 reduction Effects 0.000 claims description 8
- 230000000052 comparative effect Effects 0.000 claims description 3
- 238000000034 method Methods 0.000 claims description 3
- 238000013016 damping Methods 0.000 description 24
- 230000007246 mechanism Effects 0.000 description 24
- 238000006073 displacement reaction Methods 0.000 description 22
- 230000001133 acceleration Effects 0.000 description 20
- 230000005540 biological transmission Effects 0.000 description 13
- 238000006243 chemical reaction Methods 0.000 description 13
- 230000002093 peripheral effect Effects 0.000 description 12
- 239000012530 fluid Substances 0.000 description 9
- 230000006835 compression Effects 0.000 description 8
- 238000007906 compression Methods 0.000 description 8
- 230000007423 decrease Effects 0.000 description 7
- 238000004088 simulation Methods 0.000 description 7
- 238000004891 communication Methods 0.000 description 5
- 230000001186 cumulative effect Effects 0.000 description 5
- 238000011056 performance test Methods 0.000 description 4
- 230000008439 repair process Effects 0.000 description 4
- 230000005856 abnormality Effects 0.000 description 3
- 230000015556 catabolic process Effects 0.000 description 3
- 238000006731 degradation reaction Methods 0.000 description 3
- 230000006866 deterioration Effects 0.000 description 3
- 239000007788 liquid Substances 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 2
- 239000000470 constituent Substances 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 238000001914 filtration Methods 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000004069 differentiation Effects 0.000 description 1
- 235000013399 edible fruits Nutrition 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 238000010943 off-gassing Methods 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000011895 specific detection Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/0152—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the action on a particular type of suspension unit
- B60G17/0157—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the action on a particular type of suspension unit non-fluid unit, e.g. electric motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/016—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/018—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method
- B60G17/0182—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method involving parameter estimation, e.g. observer, Kalman filter
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/018—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method
- B60G17/0185—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method for failure detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/06—Characteristics of dampers, e.g. mechanical dampers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2202/00—Indexing codes relating to the type of spring, damper or actuator
- B60G2202/20—Type of damper
- B60G2202/24—Fluid damper
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2300/00—Indexing codes relating to the type of vehicle
- B60G2300/60—Vehicles using regenerative power
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/20—Speed
- B60G2400/202—Piston speed; Relative velocity between vehicle body and wheel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/25—Stroke; Height; Displacement
- B60G2400/252—Stroke; Height; Displacement vertical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/90—Other conditions or factors
- B60G2400/91—Frequency
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/02—Retarders, delaying means, dead zones, threshold values, cut-off frequency, timer interruption
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/08—Failure or malfunction detecting means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/18—Automatic control means
- B60G2600/187—Digital Controller Details and Signal Treatment
- B60G2600/1872—Observer; Luaponov function
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/18—Automatic control means
- B60G2600/188—Spectral analysis; Transformations
- B60G2600/1882—Fourier
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/16—Running
- B60G2800/162—Reducing road induced vibrations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/90—System Controller type
- B60G2800/91—Suspension Control
- B60G2800/916—Body Vibration Control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16F—SPRINGS; SHOCK-ABSORBERS; MEANS FOR DAMPING VIBRATION
- F16F9/00—Springs, vibration-dampers, shock-absorbers, or similarly-constructed movement-dampers using a fluid or the equivalent as damping medium
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Vehicle Body Suspensions (AREA)
- Vibration Prevention Devices (AREA)
Description
特開2005−254940号公報(特許文献2)には、電動モータを備えた電磁サスペンションユニットにおいて、実際の電動モータの作動量(モータ回転角度、あるいは、ストロークの変化量)が、電動モータへの制御値で決まる設定範囲内にあるか否かに基づいて、電磁サスペンションユニットの異常の有無を検出することが記載されている。
性能変化の判定は、電磁サスペンションユニットに振動が加えられている状態で行われる。例えば、車両が走行している状態、停止中において振動が加えられている状態が該当する。車両の走行中において、振動は主として路面入力によって加えられ、停止中においては、外部装置(加振装置)によって加えられる場合、電動アクチュエータの駆動により加えられる場合等がある。加振装置による場合には、予め決まった周波数の振動を加えることが容易となる。
前記電磁サスペンションユニットに上下方向の振動が加えられている状態において、前記ショックアブソーバにおける上下方向の伸縮量と伸縮速度との少なくとも一方を含むアブソーバ伸縮関連量の実際値を取得する実アブソーバ伸縮関連量取得部を含み、その実アブソーバ伸縮関連量取得部によって取得された前記アブソーバ伸縮関連量の実際値に基づいて前記電磁サスペンションユニットにおける性能変化を検出する性能変化検出装置と
を含むことを特徴とする電磁サスペンションシステム。
電磁サスペンションユニットの性能変化とは、性能が予め定められた基準性能から変化することをいう。基準性能は、正常範囲の性能としたり、新品の性能としたり、交換、修理が不要な範囲の性能としたり、使用可能な範囲の性能としたりすること等ができる。それに応じて、性能変化した状態は、正常範囲から外れた状態であったり、新品の状態から外れた状態であったり、交換あるいは修理が必要な状態であったり、それ以上継続して使用することが不可能な状態(異常な状態)であったりする。
ショックアブソーバの伸縮量とは、ショックアブソーバにおいて、ピストンとシリンダ本体との基準相対位置からの、ピストンとシリンダ本体との上下方向の相対移動量をいう。基準相対位置は、例えば、電動アクチュエータがフリーの状態にあり、荷重に応じて決まる車体側部と車輪側部との間に加えられる上下方向の力と標準的なサスペンションスプリングのばね力とが釣り合い、静止状態(中立状態)にある場合のピストンとシリンダ本体との相対位置をいう。一方、ショックアブソーバの長さとは、シリンダ本体の端部とピストンロッドの予め定められた部分(例えば、端部)との間の距離であり、基準相対位置にある場合の長さを基準長さとした場合に、基準長さと伸縮量との和(符号を考慮した場合の和)となる。したがって、ショックアブソーバの長さと伸縮量とは1対1に対応する値となるのであり、ショックアブソーバの長さはアブソーバ伸縮関連量に含まれる。伸縮速度は伸縮量の時間に対する微分値である。伸縮速度は基準相対位置とは関係なく取得することができる。
(2)前記性能変化検出装置が、(a)前記アブソーバ伸縮関連量を推定するアブソーバ伸縮関連量推定部と、(b)そのアブソーバ伸縮関連量推定部によって推定された前記アブソーバ伸縮関連量の推定値と前記実アブソーバ伸縮関連量取得部によって取得された前記アブソーバ伸縮関連量の実際値とを比較して、前記電磁サスペンションユニットにおける性能変化を検出する比較型性能変化検出部とを含む(1)項に記載の電磁サスペンションシステム。
ショックアブソーバの伸縮関連量の実際値と推定値とを比較すれば、電磁サスペンションユニットにおいて性能が変化したか否かを判定することができる。
実際値と推定値とを比較する場合、実際値と推定値とを直接比較しても、実際値、推定値を処理した値同士を比較してもよい。
伸縮量、伸縮速度は、電磁サスペンションユニットに加えられた振動に応じて変化するため、例えば、振動のピーク(振幅)同士を比較することができる。また、実際値、推定値を統計的に処理した値を使用すれば、平均的な変位や変位の変化速度同士を比較することができる。
例えば、実際値、推定値の絶対値の設定時間内の積算値を求め、積算値同士を比較することができる。絶対値の積算値同士を比較すれば、実際値、推定値の変位の絶対値の平均的な値同士を比較することが可能となる。また、絶対値の積算値に限らず、設定時間内の絶対値の平均値を使用して比較することも可能である。さらに、設定時間内の実際値、推定値のピーク値(振幅)の絶対値の積算値や平均値を採用することもできる。
また、実際値等(実際値、実際値を処理した値を含む。以下、同様とする)と推定値等(以下、推定値、推定値を処理した値を含む。以下、同様とする)とを比較する場合には、これらの差を求めたり、比を求めたりすることができ、差と比との少なくとも一方に基づけば、性能が変化したか否かを適切に判定することができる。
さらに、振幅同士あるいは平均的な変位同士を比較する場合において、所望の周波数域の振動成分の振幅あるいは平均的な変位同士を比較することが望ましい場合がある。例えば、実際値、推定値をフィルタ処理したり、フーリエ変換したりすること等により所望の周波数域の振動を抽出して、実際値等と推定値等とを比較したり、電磁サスペンションユニットに所望の周波数域の振動を加え、その場合の実際値等と推定値等とを比較したりすることができる。
さらに、実際値の周波数と推定値の周波数とを比較することもできる。
また、実際値等と推定値等とを比較する場合に、伸縮量の実際値等と伸縮速度の推定値等とを比較することも不可能ではないが、伸縮量の実際値等と伸縮量の推定値等、伸縮速度の実際値等と伸縮速度の推定値等とを比較することが望ましい。
(3)前記比較型性能変化検出部が、前記アブソーバ伸縮関連量の推定値と実際値との差の絶対値の予め定められた設定時間内の平均的な値に関連する値が予め定められた判定しきい値より大きい場合に、前記電磁サスペンションユニットの性能が変化した状態にあると検出する性能変化有無検出部を含む(2)項に記載の電磁サスペンションシステム。
推定値と実際値との差の絶対値の予め定められた設定時間内の平均的な値に関連する値には、設定時間内の差の絶対値の積算値,平均値,その他統計的に処理した値が含まれる。
差の絶対値の設定時間内の平均的な値に関連する値(以下、平均関連差と称する)が判定しきい値以下である場合には、性能は変化していないと考えられるが、判定しきい値より大きい場合には、性能が変化した状態にあると判定することができる。性能が変化したか否かの判定結果は、同じ結果が設定回数以上続いた場合に、決定(確定)されるようにしたり、判定結果の決定にヒステリシスを設けたりすることができる。
判定しきい値を0、あるいは、0より大きく、かつ、0近傍の0より大きい第1設定値以下の値とすれば、推定値を取得するために想定された状態(前述の基準性能が得られる状態であり、例えば、正常状態、新品の状態等とすることができる)から、僅かに外れた場合に性能が変化したと判定される。推定値は、推定モデルに基づいて取得されるのが普通であるため、基準性能は、その推定モデルで決まる。例えば、推定モデルが、新品の状態を想定して設定されている場合には、その状態から外れた場合に性能が変化した状態にあると判定されることになる。
それに対して、判定しきい値を正の大きな値(0より大きい第2設定値以上の値)とすれば、推定値を取得するために想定された状態から大きく外れた場合に性能が変化した状態にあると判定される。例えば、推定モデルが新品の状態を想定して設けられた場合には、交換、修理を要する状態となった場合、あるいは、使用不要な状態となった場合に、性能が変化した状態にあると判定されることになる。
推定モデル、判定しきい値は、以上の事情を考慮して設定される。
また、複数の推定モデルや判定しきい値が設けられれば、性能低下のレベル(程度)を複数段階で取得することが可能となる。例えば、運転者に性能低下のレベルを報知することが可能となり、運転者は性能低下のレベルについて詳細な情報を得ることができる。また、電磁サスペンションユニットの設計段階において、性能変化過程を評価することも可能である。
さらに、推定モデル、判定しきい値を選択可能とすることができる。性能変化が報知される場合には、性能変化のレベルが運転者が意図する所望のレベルに達した場合に報知されるようにすることができる。
(4)前記比較型性能変化検出部が、前記アブソーバ伸縮関連量の推定値と実際値との比の絶対値の予め定められた設定時間内の平均的な値に関連する値が予め定められた範囲からはずれた場合に、前記電磁サスペンションユニットの性能が変化した状態にあると検出する性能変化有無検出部を含む(2)項または(3)項に記載の電磁サスペンションシステム。
実際値と推定値との比の絶対値の設定時間内の平均的な値に関連する値(平均関連比)が予められた範囲から外れた場合に、性能が変化したと検出することができる。例えば、実際値と推定値との平均関連比には、実際値を推定値で割った値(実際値/推定値)の平均関連比<|A*/A′|>が、設定範囲の上限値より大きい場合、設定範囲の下限値より小さい場合に、性能が変化したと検出されるのである。
以下の各項において、いちいち記載しないが、差に基づく判定は、比に基づく判定に代えて採用することができる。
また、実際値と推定値との差の絶対値の平均的な値を、実際値の絶対値の平均的な値と推定値の絶対値の平均的な値との差の絶対値に代えて採用したり、実際値と推定値との比の絶対値の平均的な値を、実際値の絶対値の平均的な値と推定値の絶対値の平均的な値との比に代えて採用したりすることができる。
例えば、(i)実際値A*と推定値A′との差の平均関連差(例えば、Σ|A*−A′|)を判定しきい値と比較することを、(ii)実際値の絶対値の設定時間内の平均的な値を表す値(以下、平均関連実際値と称する)Σ|A*|と、推定値の絶対値の設定時間内の平均的な値を表す値(以下、平均関連推定値と称する)Σ|A′|との差の絶対値|Σ|A*|−Σ|A′||を判定しきい値と比較することに代えたり、(a)実際値と推定値との平均関連比(<|A*/A′|>、<|A′/A*|>)を、(b)平均関連実際値と平均関連推定値との比(<|A*|>/<|A′|>、<|A′|>/<|A*|>)に代えたりすることもできるのである。
(5)前記比較型性能変化検出部が、前記アブソーバ伸縮関連量の実際値の絶対値の予め定められた設定時間内の平均的な値に関連する平均関連実際値が、前記アブソーバ伸縮関連量の推定値の絶対値の前記設定時間内の平均的な値に関連する平均関連推定値に対して大きい場合に、(i)前記ショックアブソーバの性能が抵抗が不足する側に変化した状態と、(ii)前記電動アクチュエータの性能が抵抗が大きくなる側に変化した状態との少なくとも一方を含むと検出する手段を含む(2)項ないし(4)項のいずれか1つに記載の電磁サスペンションシステム。
アブソーバ伸縮関連量の平均関連実際値(実際値等に含まれる)が平均関連推定値(推定値等に含まれる)より大きい場合には、基準性能よりショックアブソーバにおける抵抗が不足する(小さくなる)場合と、電動アクチュエータにおいて抵抗が大きくなる場合とがある。電動アクチュエータにおいて抵抗が大きくなると、電動アクチュエータが伸縮し難くなるため、その分、ショックアブソーバが伸縮させられることになる。
(6)前記比較型性能変化検出部が、前記アブソーバ伸縮関連量の実際値の絶対値の予め定められた設定時間内の平均的な値に関連する平均関連実際値が、前記アブソーバ伸縮関連量の推定値の絶対値の前記設定時間内の平均的な値に関連する平均関連推定値で決まる伸縮抵抗不足判定しきい値より大きい場合に、前記ショックアブソーバの性能が伸縮抵抗不足側に変化した状態にあると検出する伸縮抵抗不足検出部を含む(2)項ないし(5)項のいずれか1つに記載の電磁サスペンションシステム。
ショックアブソーバの伸縮関連量の平均関連実際値が平均関連推定値で決まる伸縮抵抗不足判定しきい値より大きい場合には、ショックアブソーバにおいて抵抗が不足する側に性能が変化した状態にあると判定される。伸縮抵抗不足判定しきい値は、平均関連推定値に0以上の設定値を加えた値としたり、平均関連推定値に1以上の値を掛けた値としたりすることができる。
この判定は、電動アクチュエータの性能変化が検出されない場合(抵抗が大きくなる側に変化していない場合)に行われることが望ましい。
ショックアブソーバにおける伸縮抵抗は、ショックアブソーバにおいて発生させられる減衰力、ピストンとシリンダ本体との間の摩擦、ショックアブソーバと並列にスプリングが設けられる場合において、そのスプリングのばね力によって加えられる。そのため、抵抗が小さくなるのは、減衰力が小さくなった場合、シール部材の摩耗等によりピストンとシリンダ本体との間の摩擦が小さくなった場合、スプリングのばね係数が小さくなった場合等が考えられる。また、減衰力が不足する(伸縮速度が同じ場合に発生する減衰力が基準状態における場合より小さくなること)のは、液漏れ、ガス抜け、作動液(オイル)の劣化等に起因すると考えられる。
それに対して、ショックアブソーバにおいて発生させられる抵抗を全体として減衰力と称する場合には、伸縮抵抗が不足する側の性能変化を減衰力が不足する側の性能変化と称することができる。
(7)前記比較型性能変化検出部が、前記アブソーバ伸縮関連量の実際値の絶対値の予め定められた設定時間内の平均的な値に関連する平均関連実際値が、前記アブソーバ伸縮関連量の推定値の絶対値の前記設定時間内の平均的な値に関連する平均関連推定値に対して小さい場合に、(i)前記ショックアブソーバの性能が抵抗が大きくなる側に変化した状態と、(ii)前記電動アクチュエータの性能が抵抗が小さくなる側に変化した状態との少なくとも一方を含むと検出する手段を含む(2)項ないし(6)項のいずれか1つに記載の電磁サスペンションシステム。
平均関連実際値が平均関連推定値に対して小さくなったのは、ショックアブソーバにおいて伸縮抵抗が大きくなった場合、電動アクチュエータにおいて抵抗が小さくなった場合がある。電動アクチュエータにおいて抵抗が小さくなると、電動アクチュエータの方が伸縮し易くなるからである。
(8)前記比較型性能変化検出部が、前記アブソーバ伸縮関連量の実際値の絶対値の予め定められた設定時間内の平均的な値に関連する平均関連実際値が、前記アブソーバ伸縮関連量の推定値の絶対値の前記設定時間内の平均的な値に関連する平均関連推定値で決まるフリー側変化判定しきい値より小さい場合に、前記電動アクチュエータの性能がフリー側に変化した状態にあると検出するフリー側性能変化検出部を含む(2)項ないし(7)項のいずれか1つに記載の電磁サスペンションシステム。
平均関連実際値が平均関連推定値より小さい場合には、電動アクチュエータの性能がフリー側に変化したと検出される。
この判定は、ショックアブソーバが正常である場合(ショックアブソーバの性能が抵抗が大きくなる側に変化したと検出されない場合)において行われることが望ましい。
一方、電磁サスペンションユニットが、低周波数の振動が加えられた場合に、主として電動アクチュエータが伸縮させられるように設計されている場合において、アブソーバ伸縮関連量の低周波数の実際値等が推定値等より小さい場合には、電動アクチュエータの性能がフリー側に変化したと考えるのが妥当である。例えば、低周波数の振動が加えられた場合のアブソーバ伸縮関連量の実際値等、推定値等を使用したり、あるいは、アブソーバ伸縮関連量の実際値の低周波成分(フィルタ処理、フーリエ変換等により抽出された成分)の実際値等、推定値等を使用したりして検出することができる。後述する高周波数の実際値等についても同じである。
例えば、電動アクチュエータが電動モータと運動変換機構とを含む場合には、断線等により電動モータがフリーな状態になったことが該当する。
(9)前記比較型性能変化検出部が、前記アブソーバ伸縮関連量の実際値の絶対値の予め定められた設定時間内の平均的な値に関連する平均関連実際値が、前記アブソーバ伸縮関連量の推定値の絶対値の予め定められた設定時間内の平均的な値に関連する平均関連推定値で決まる抵抗増加判定しきい値より小さい場合に、前記ショックアブソーバの性能が伸縮抵抗が大きくなる側に変化した状態にあると検出する伸縮抵抗増加検出部を含む(2)項ないし(8)項のいずれか1つに記載の電磁サスペンションシステム。
アブソーバ伸縮関連量の平均関連実際値が、平均関連推定値で決まる抵抗大判定しきい値より小さい場合には、ショックアブソーバにおいて、伸縮抵抗が大きくなる側に性能が変化した状態にあると判定される。この判定は、電動アクチュエータが正常である場合(電動アクチュエータの性能が抵抗が小さくなる側に変化したと検出されない場合)において行われることが望ましい。
伸縮抵抗が大きくなったのは、減衰力が大きくなったこと、ピストンとシリンダ本体との間の摩擦が大きくなったこと等が考えられる。例えば、減衰力発生機構の連通路に異物が混入して一部あるいは全ての連通路が塞がれた場合、ピストンやシリンダ本体の錆び等により摩擦が大きくなった場合、異物等によりピストン自体が移動し難くなった場合等が考えられる。
一方、ショックアブソーバは高周波数の振動により伸縮させられ易いように設計されることが多い。そのため、アブソーバ伸縮関連量の平均関連実際値と平均関連推定値とを比較する場合に、高周波数の実際値等、推定値等を使用することが望ましい。
(10)前記性能変化検出装置が、前記電磁サスペンションユニットにおいて性能が変化したと検出された場合に、前記電動アクチュエータの作動量と作動速度との少なくとも一方を含む電動作動関連量の実際値と、前記車両のばね上部の上下方向の移動量と移動速度との少なくとも一方を含むばね上部移動関連量の実際値と、前記車体側部と前記車輪側部との間の上下方向の距離の変化量と変化速度との少なくとも一方を含むばね上ばね下間距離関連量の実際値とのうちの1つ以上に基づいて、性能変化部を特定する性能変化部特定部を含む(1)項ないし(9)項のいずれか1つに記載の電磁サスペンションシステム。
電動作動関連量、ばね上部移動関連量、ばね上ばね下間距離関連量の1つ以上の実際値等に基づけば性能変化部を特定することができる。また、これら実際値等と推定値等とをそれぞれ比較して特定することもできる。
性能変化が生じた部位を特定できれば、例えば、その部品のみを交換すればよく、電磁サスペンションユニット全体を交換する必要がなくなる。そのため、交換コストを低減することができる。また、性能変化が生じた部位を特定できれば、修理を行う際にも便利である。
電動アクチュエータの作動量は、基準位置(電動モータがフリーで静止している状態における位置)からの作動量をいう。したがって、電動アクチュエータの長さと作動量とは1対1に対応する値であるため、電動アクチュエータの長さも電動作動関連量に含まれる。電動アクチュエータの長さは、例えば、アクチュエータ本体と出力部材の本体からの突出量との和とすることができる。
また、電動作動関連量は、電動伸縮関連量と称することもできる。電動アクチュエータが、電動モータと運動変換機構とを含む場合に、電力を供給しなくても、運動変換機構が作動させられ、上下方向の長さが変化するからである。
また、ばね上部の移動量は、基準位置からの移動量、すなわち、変位である。移動速度は、変位の時間の微分値(絶対速度)であり、基準位置とは関係なく取得することができる。
ばね上ばね下間距離の変化量も同様であり、基準位置におけるばね上ばね下間の距離からの変化量をいう。したがって、ばね上ばね下間距離もばね上ばね下間距離関連量に含まれる。
(11)前記性能変化部特定部が、前記電動作動関連量の実際値の絶対値の予め定められた設定時間内の平均的な値に関連する平均関連実際値が、第1ロック側変化判定しきい値より小さい場合に、前記電動アクチュエータの性能がロック側に変化した状態にあると検出する第1ロック側変化検出部を含む(10)項に記載の電磁サスペンションシステム。
電動アクチュエータの電動作動関連量の実際値が第1ロック側変化判定しきい値より小さい場合には、電動アクチュエータの性能が抵抗が大きくなる側に変化したと検出される。
例えば、電動アクチュエータが電動モータと運動変換機構とを含む場合において、電動モータがロックした状態(運動変換機構においてねじ軸とナット部との相対回転不能となった状態)、運動変換機構においてねじ軸とナット部との摩擦が大きくなった状態等が考えられる。なお、第1ロック側変化判定しきい値は、予め定められた固定値(絶対的ロック側変化判定しきい値)であっても、前記電動作動関連量の推定値の絶対値の前記設定時間内の平均的な値に関連する平均関連値で決まる値(相対的ロック側変化判定しきい値)であってもよい。
この判定は、電動アクチュエータが予め定められた規則に従って制御されている状態で行っても、制御されていない状態で行ってもよい。電動アクチュエータが電動モータを含む場合において、電動アクチュエータが制御されていない場合には、電動モータにおいて減衰力が発生させられる。
(12)前記性能変化検出装置が、前記比較型性能変化検出部によって前記電磁サスペンションユニットにおいて性能が変化したと検出された場合に、(x)前記車体側部と前記車輪側部との間の距離の変化量と変化速度との少なくとも一方を含むばね上ばね下間距離関連量の実際値と推定値との差の絶対値の予め定められた設定時間内の平均的な値に関連する平均関連値が予め定められた特定しきい値より大きい場合に、前記電動アクチュエータの性能がフリー側に変化した状態にあると検出する手段と、(y)前記ばね上ばね下間距離関連量の実際値と推定値との差の前記平均関連値が前記特定しきい値以下である場合に、前記ショックアブソーバの性能が伸縮抵抗が大きくなる側に変化した状態にあると検出する手段とのうちの少なくとも一方を含む(2)項ないし(11)項のいずれか1つに記載の電磁サスペンションシステム。
前述のように、電動アクチュエータの性能がフリー側に変化した場合にも、ショックアブソーバの性能が抵抗が大きくなる側に変化した場合にも、アブソーバ伸縮関連量の平均関連実際値が平均関連推定値より小さくなり、これらの差が大きくなって性能変化が検出される。
それに対して、ショックアブソーバと電動アクチュエータとが直列に設けられている場合であって、ショックアブソーバの伸縮関連量が電動アクチュエータの電動作動量に対して小さくなるように設計されている場合には、ショックアブソーバの性能が抵抗が大きくなる側に変化しても、ばね上ばね下間距離関連量の実際値等と推定値等との差はそれほど大きくならないが、電動アクチュエータの性能がフリー側へ変化すると、ばね上ばね下間距離関連量の実際値等と推定値等との差が大きくなる。
以上のことから、ばね上ばね下間距離関連量の実際値と推定値との差の平均関連値が小さい場合にはショックアブソーバの性能が抵抗が大きくなった側に変化したと判定し、実際値と推定値との差の平均関連値が大きい場合には、電動アクチュエータの性能がフリー側に変化したと判定することができる。
なお、ばね上ばね下間距離関連量の実際値と推定値との差の平均関連値が大きい場合には、電動アクチュエータの性能がフリー側に変化し、かつ、ショックアブソーバの性能も抵抗が大きくなる側に変化した可能性がある。しかし、性能変化が同時に2箇所で起きる可能性は非常に低いと考え、この場合には、電動アクチュエータの性能が変化したと検出されるようにすることもできる。それに対して、別の方法で、ショックアブソーバの性能が変化したか否かを検出することも可能である。例えば、アブソーバ伸縮関連量の高周波数の平均関連実際値が平均関連推定値で決まる抵抗大しきい値より小さい場合に、ショックアブソーバの性能も変化したと検出することができる。
(13)前記液圧式のショックアブソーバと前記電動アクチュエータとが、前記車体側部と前記車輪側部との間に互いに直列に設けられた(1)項ないし(12)項のいずれか1つに記載の電磁サスペンションシステム。
ショックアブソーバは、シリンダ本体と、そのシリンダ本体に摺動可能に嵌合されたピストンとを含むものであり、シリンダ本体とピストンのピストンロッドとのいずれか一方が車体側部と車輪側部とのいずれか一方に原則として上下方向に相対移動不能に連結され、シリンダ本体とピストンロッドとの他方が電動アクチュエータの出力軸に連結されている。電動アクチュエータの本体は、車体側部と車輪側部との他方に原則として上下方向に相対移動不能に連結されている。
なお、車体側部と車輪側部との間には、サスペンションスプリングが、互いに直列に連結されたショックアブソーバおよび電動アクチュエータに並列に設けられることが多い。
また、ショックアブソーバと電動アクチュエータとの間には、連結部材(中間部材)が設けられることもある。
(14)前記電動アクチュエータが、電動モータと運動変換機構とを含み、前記電動モータの固定部が前記車体側部に取り付けられ、回転部が前記運動変換機構を介して前記ショックアブソーバに連結された(1)項ないし(13)項のいずれか1つに記載の電磁サスペンションシステム。
運動変換機構は、ねじロッドと、ナット部と、これらの間に設けられたボールとを含むボールねじ機構とすることが望ましい。ボールねじ機構により、電動アクチュエータの伸縮抵抗を小さくすることができる。
(15)前記性能変化検出装置が、前記中間部材の上下方向の移動量と移動速度との少なくとも一方を含む中間部材移動関連量と、前記車両のばね上部の上下方向の移動量と移動速度との少なくとも一方を含むばね上部移動関連量との少なくとも一方を推定する推定部を含む(1)項ないし(14)項のいずれか1つに記載の電磁サスペンションシステム。
中間部材の移動量、ばね上部の移動量とは、それぞれ、前述のように、基準位置からの移動量(変位)である。移動関連量が推定される車両のばね上部は、電磁サスペンションユニットが取り付けられる車体側部と同じ部材であっても異なる部材であってもよい。
(16)前記推定部が、前記電磁サスペンションユニットについて作成された予め定められたモデルに基づき、(i)前記車両のばね下部の上下方向の移動量の実際値および移動速度の実際値と、(ii)前記電動アクチュエータによって付与される上下方向力の実際値とから、(x)前記中間部材移動関連量と(y)前記ばね上部移動関連量との少なくとも一方を推定するオブザーバを含む(15)項に記載の電磁サスペンションシステム。
ショックアブソーバと電動アクチュエータとが、中間部材を介して車輪側部と車体側部との間に直列に設けられる場合、モデルを用いて、ばね下部の移動量、移動速度、電動アクチュエータの出力等を入力して、中間部材の移動量(変位)、移動速度(絶対速度)やばね上部の移動量(変位)、移動速度(絶対速度)がオブザーバにより推定される。
推定された中間部材の移動量、移動速度に基づけば、ショックアブソーバの伸縮量や伸縮速度を推定することができ、推定されたばね上部の移動量、移動速度に基づけば、ばね上ばね下間距離の変化量や変化速度を推定することができる。また、中間部材の移動量、移動速度と、ばね上部の移動量、移動速度との両方に基づけば、電動アクチュエータの作動量や作動速度を推定したりすることができる。
なお、車両のばね下部は電磁サスペンションユニットが取り付けられる車輪側部と同じ部材であっても異なる部材であってもよい。
(17)前記性能変化検出装置が、(a)前記中間部材移動関連量の実際値を前記アブソーバ伸縮関連量の実際値と前記車両のばね下部の上下方向の移動量と移動速度との少なくとも一方を含むばね下移動関連量の実際値とから取得する中間部材移動関連量取得部と、(b)それら中間部材移動関連量の実際値と前記推定部によって推定された中間部材移動関連量の推定値との差の絶対値の予め定められた設定時間内の平均的な値に関連する平均関連値が予め定められた中間部材対応判定しきい値より大きい場合に、前記電磁サスペンションユニットの性能が変化した状態にあると検出する中間部材対応性能変化検出部とを含む(15)項または(16)項に記載の電磁サスペンションシステム。
中間部材の移動関連量の実際値等と推定値等との差の絶対値が大きい場合には、電磁サスペンションユニットの性能が変化したとすることができる。
中間部材は、例えば、ショックアブソーバのシリンダ本体とピストンロッドとのいずれか一方に連結されるとともに電動アクチュエータの出力部材に連結されたものを含むものとすることができる。
(18)前記アブソーバ伸縮関連量推定部が、前記推定部によって推定された前記中間部材移動関連量の推定値と前記車両のばね下部の上下方向の移動量と移動速度との少なくとも一方を含むばね下移動関連量の実際値とから、前記アブソーバ伸縮関連量の推定値を取得する中間部材依拠伸縮関連量推定部を含む(15)項ないし(17)項のいずれか1つに記載の電磁サスペンションシステム。
推定された中間部材の移動量、移動速度からばね下部の移動量、移動速度を引けば、ショックアブソーバ伸縮関連量を推定することができる。
(19)前記性能変化検出装置が、(a)前記推定部によって推定された前記ばね上部移動関連量の推定値から前記中間部材移動関連量の推定値を引いて前記電動アクチュエータの作動量と作動速度との少なくとも一方を含む電動作動関連量の推定値を取得する電動作動関連量推定値取得部と、(b)前記電動アクチュエータの電動作動関連量の実際値の絶対値の予め定められた設定時間内の平均的な値に関連する平均関連実際値が、前記電動作動関連量推定値取得部によって取得された推定値の絶対値の前記設定時間内の平均的な値に関連する平均関連推定値で決まる第2ロック側変化判定しきい値より小さい場合に、前記電動アクチュエータの性能がロック側に変化した状態にあると検出する第2ロック側変化検出手段とを含む(15)項ないし(18)項のいずれか1つに記載の電磁サスペンションシステム。
ばね上部移動関連量と中間部材移動関連量とに基づけば、電動アクチュエータの電動作動関連量を取得することができる。
(20)前記実アブソーバ伸縮関連量取得部が、前記車体側部と前記車輪側部との間の距離の変化量と変化速度との少なくとも一方を含むばね上ばね下間距離関連量の実際値と、前記電動アクチュエータの作動量と作動速度との少なくとも一方を含む電動作動関連量の実際値とから前記アブソーバ伸縮関連量の実際値を取得する実伸縮関連量算出部を含む(1)ないし(19)項のいずれか1つに記載の電磁サスペンションシステム。
ショックアブソーバと電動アクチュエータとが、車輪側部と車体側部との間に直列に設けられる場合、ショックアブソーバの伸縮量を検出するには、ピストンのシリンダ本体に対する相対移動量を検出しなければならない。しかし、ピストンのシリンダ本体に対する相対移動量を検出するセンサは設けられていないのが普通である。一方、車高センサでは、ショックアブソーバの伸縮を検出することはできない。そこで、本項に記載の電磁サスペンションシステムにおいては、2つの以上のセンサによる検出値を用いてショックアブソーバの伸縮が検出されるのである。
例えば、車高センサによる検出値からばね上ばね下間距離関連量の実際値が取得され、電動アクチュエータの作動量を検出するセンサの検出値から電動作動関連量の実際値が取得され、ばね上ばね下間距離関連量の実際値から電動作動関連量の実際値を引くことによりショックアブソーバの伸縮関連量の実際値が取得される。
また、ばね上ばね下間距離関連量の実際値は、ばね上部移動関連量の実際値とばね下部移動関連量の実際値とから取得することもできる。ばね上ばね下間距離関連量、ばね上部移動関連量、ばね下部移動関連量の間には、予め定められた関係が成立するため、これらのうちの2つを取得できれば、残りの1つを算出することが可能である。以下、本明細書に記載の「実際値」は、1つのセンサにより直接検出される場合、1つのセンサによる検出値から算出される場合(微分、積分等)、複数のセンサによる検出値から算出される場合等がある。
(21)前記性能変化検出装置が、前記電磁サスペンションユニットにおける性能変化の程度を段階的に検出する性能変化レベル検出部を含む(1)項ないし(20)項のいずれか1つに記載の電磁サスペンションシステム。
性能変化のレベルを段階的に検出できれば、交換の時期、修理の時期がわかり、便利である。また、経時的な性能変化を評価する上で有効である。
(22)当該電磁サスペンションシステムが、前記性能変化検出装置によって検出された前記電磁サスペンションユニットにおける性能変化の検出結果を報知する報知部を含む(1)項ないし(21)項のいずれか1つに記載の電磁サスペンションシステム。
(23)前記電磁サスペンションユニットが、前記車両の前後左右の各輪に対応して設けられたものであり、前記性能変化検出装置が、前記前後左右の各輪毎の電磁サスペンションユニットの各々について前記実アブソーバ伸縮関連量取得部によって取得された前記アブソーバ伸縮関連量の実際値の絶対値の予め定められた設定時間内の平均的な値に関連する平均関連実際値同士を比較して、前後左右の各輪の前記ショックアブソーバの各々の性能変化を検出する各輪比較型性能変化検出部を含む(1)項ないし(22)項のいずれか1つに記載の電磁サスペンションシステム。
(24)前記各輪比較型性能変化検出部が、(a)前記前後左右の各輪のうちの検査対象車輪についてのアブソーバ伸縮関連量の平均関連実際値が、前後左右の各輪のアブソーバ伸縮関連量の平均関連実際値の平均的な値で決まる設定範囲の下限値より小さい場合に、前記検査対象車輪の前記ショックアブソーバの性能が伸縮抵抗が大きくなる側に変化した状態にあると検出する手段と、(b)検査対象車輪についての前記アブソーバ伸縮関連量の平均関連実際値が、前記設定範囲の上限値より大きい場合に、前記検査対象車輪の前記ショックアブソーバの性能が伸縮抵抗が小さくなる側に変化した状態にあると検出する手段との少なくとも一方を含む(23)項に記載の電磁サスペンションシステム。
4輪の各々の電磁サスペンションユニットのショックアブソーバの伸縮関連量の実際値等同士を比較すれば、4輪各々におけるショックアブソーバの性能変化を、それぞれ、検出することができる。
この検出は、電動アクチュエータの性能が変化していないことが前提である。
(25)前記電磁サスペンションユニットが、前記車両の前後左右の各輪に対応して設けられたものであり、前記性能変化検出装置が、前記電動アクチュエータの作動量と作動速度との少なくとも一方を含む電動作動関連量の実際値を取得する電動作動関連量取得部と、前記前後左右の各輪毎の電磁サスペンションユニットの各々について、前記電動作動関連量取得部によって取得された電動作動関連量の実際値同士を比較することにより、各輪毎にそれぞれ前記電動アクチュエータの性能変化を検出する電動アクチュエータ性能変化検出部とを含む(1)項ないし(23)項のいずれか1つに記載の電磁サスペンションシステム。
前後左右に各輪毎で、電動アクチュエータの電動作動関連量の実際値等同士を比較すれば、電動アクチュエータの性能変化を検出することができる。
(26)前記電動アクチュエータ性能変化検出部が、(a)前記前後左右の各輪のうちの検査対象車輪についての前記電動作動関連量の予め定められた設定時間内の平均的な値に関連する平均関連実際値が、前後左右の各輪の電動作動関連量の前記平均関連値の平均的な値できまる設定範囲の下限値より小さい場合に、前記検査対象車輪の前記電動アクチュエータの性能がロック側に変化した状態にあると検出する手段と、(b)検査対象車輪についての前記電動作動関連量の平均関連実際値が、前記設定範囲の上限値より大きい場合に、前記検査対象車輪の前記電動アクチュエータの性能がフリー側に変化した状態にあると検出する手段との少なくとも一方を含む(25)項に記載の電磁サスペンションシステム。
(27)前記電動アクチュエータと前記液圧式のショックアブソーバとが、前記車体側部と前記車輪側部との間に、互いに並列に設けられ、前記性能変化検出装置が、(a)少なくとも前記電動アクチュエータによって付与される上下方向力に基づいて前記アブソーバ伸縮関連量を推定する並列型アブソーバ伸縮関連量推定部と、(b)その並列型アブソーバ伸縮関連量推定部によって推定された前記アブソーバ伸縮関連量の推定値と、前記実アブソーバ伸縮関連量取得部によって取得された前記アブソーバ伸縮関連量の実際値とを比較して、前記電磁サスペンションユニットの性能変化を検出する並列型性能変化検出部を含む(1)項ないし(9)項、(20)項ないし(26)項のいずれか1つに記載の電磁サスペンションシステム。
ショックアブソーバにおいて伸縮抵抗が大きくなると、実際値等が推定値等より小さくなり、伸縮抵抗が小さくなる(液漏れ等による減衰不足が生じる)と実際値等が推定値等より大きくなる。
また、電動アクチュエータの性能がロック側に変化すると、ショックアブソーバの伸縮関連量の実際値等が推定値等より小さくなり、フリー側に変化すると、実際値等が推定値等より大きくなる。
以上のことから、電磁サスペンションユニットにおいて、ショックアブソーバの性能変化や電動アクチュエータの性能変化を検出することができる。
なお、車体側部と車輪側部との間には、さらに、サスペンションスプリングが、電動アクチュエータ、ショックアブソーバと並列に設けられるのが普通である。
(28)車両の車輪に対応して、車体側部と車輪側部との間に、互いに直列に、中間部材を介して連結された(a)液圧式のショックアブソーバと、(b)前記車体側部と前記車輪側部との間に上下方向力を付与する電動アクチュエータとを備えた電磁サスペンションユニットと、
前記電磁サスペンションユニットに上下方向の振動が加えられている状態において、(a)前記電磁サスペンションユニットについて作成された予め定められたモデルに基づき、前記車両のばね下部の上下方向の移動量の実際値および移動速度の実際値と、前記電動アクチュエータによって付与される上下方向力の実際値とから、前記中間部材の上下方向の移動量と移動速度との少なくとも一方を含む中間部材移動関連量と、前記車両のばね上部の上下方向の移動量と移動速度との少なくとも一方を含むばね上部移動関連量との少なくとも一方を推定する推定装置と
を含むことを特徴とする電磁サスペンションシステム。
中間部材移動関連量、ばね上部移動関連量が推定されるため、推定された値を利用すれば、アブソーバ伸縮関連量の推定値、電動作動関連量の推定値、ばね上ばね下間距離関連量の推定値を取得することができ、それらの推定値等を使用すれば、電磁サスペンションユニットの性能変化の有無の検出、性能変化の部位の特定が可能となる。
また、電動アクチュエータによって付与される上下方向力の実際値は、制御指令値から取得された値であっても、電動アクチュエータに流れる実際の電流値に基づいて取得された値であってもよい。
本項に記載の電磁サスペンションシステムには、(1)項ないし(27)項のいずれか1つに記載の技術的特徴を採用することができる。具体的な性能変化の有無の検出、性能変化部の特定等について、上述の各項の関連する記載を抜き出して採用することができる。
電磁サスペンションシステムにおいて、車両の前後左右の各車輪2FL,FR,RL,RRに対応して、それぞれ、電磁サスペンションユニット4FL,FR,RL,RRが、車輪側部12(図2参照)と車体側部14(図2参照)との間に設けられる。以下、符号は、車輪位置を特定する必要がない場合には、車輪位置FL,FR,RL,RRを付することなく使用する。他の構成要素についても同様とする。
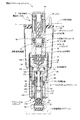
電磁サスペンションユニット4は、図2に示すように、車輪2を保持するサスペンションロアアーム(車輪側部)12と、車体の、その車輪12に対応する部分14(電磁サスペンションユニット4が取り付けられた部分。車体側部)との間に取り付けられるものであって、上下方向力を付与する電動アクチュエータ16と、液圧式のショックアブソーバ18と、サスペンションスプリングとしてのエアスプリング20とを含む。電動アクチュエータ16と液圧式ショックアブソーバ18とが、車輪側部12と車体側部14との間に直列に設けられ、これらとエアスプリング20とが並列に設けられる。
チャンバシェル30は、車体側部14に、マウント部(弾性部材を含む)35を介して、原則的に、上下方向に相対移動不能に連結され、チャンバシェル30の内側には、電動アクチュエータ16のハウジング(以下、モータハウジングと称する)38が固定されている。
エアピストン筒32は、液圧式ショックアブソーバ18のハウジング(以下、アブソーバハウジングと称する)40に固定され、アブソーバハウジング40が、ロアアーム12に、原則的に、上下方向に相対移動不能に連結されている。また、エアピストン筒32は、モータハウジング38に対して、相対移動可能とされている。
ダイヤフラム34は、一端部がチャンバシェル30に固定され、他端部がエアピストン筒32に固定されており、それらチャンバシェル30、ダイヤフラム34、エアピストン筒32,モータハウジング38によってエアチャンバ(エア室)42が形成される。
なお、エアチャンバ42には、流体としての圧縮エアが封入されており、圧縮エアによって、車体が弾性的に支持される。また、エアチャンバ42に収容される圧縮エアの量を調整することによって、車体側部14と車輪側部12との間の距離である車高(定常的な距離)を調整することができる。
電動モータ50は、複数のコイル60を含むステータと、コイル60の内周側に設けられたロータとしてのモータ出力軸62とを含む。モータ出力軸62は、複数の磁石部を備えたものであり、軸受64,66を介してモータハウジング38に相対回転可能に保持されている。モータ出力軸62は中空状の筒状とされており、内周側にナット部材52が相対回転不能に保持されている。なお、モータ出力軸62において、磁石部は、モータ出力軸62の外周面に設けても、埋め込んでもよい。
ナット部材52の内周側には雌ねじ部が形成されており、多数のベアリングボールが保持されている。ねじ軸54は、ナット部材52の内周側を貫通して設けられるが、ねじ軸54の外周面には、ナット部材52の雌ねじ部と、ベアリングボールを介して螺合するねじ溝が形成されるとともに、軸方向に延びた複数の凹部72が形成されている。ねじ軸54は、中間部においてナット部材52および回り止め部材56を貫通し、下端部において液圧式ショックアブソーバ18のピストンロッド74に固定されるとともに力伝達装置76を介してアブソーバハウジング40に連結される。
回り止め部材56は、モータハウジング38に相対回転不能に保持される。また、内周面には、ねじ軸54に形成された凹部72と同じ位相で軸方向に延びた突部が形成され、ねじ軸54が、それの凹部72が突部に係合する相対位相で、回り止め部材56の内周側に配設される。回り止め部材56により、ねじ軸54のモータハウジング38に対する相対回転が阻止されつつ、軸方向の相対移動が許容される。回り止め部材56は、ねじ軸54の横方向の移動を阻止する機能も有する。
本実施例においては、ねじ軸54、ナット部52,回り止め部材56等により回転を直線運動に変換する運動変換機構77が構成される。運動変換機構77はボールねじ機構を有するものであり、力伝達機構でもある。
力伝達装置76は、伝達部材82,圧縮コイルスプリング84,86等を含む。伝達部材82は、概して、円筒状を成したものであり、底部においてねじ軸54に固定され、筒部の開口部に設けられたフランジが中間リテーナ88とされ、シリンダ本体78に固定された下部リテーナ90および上部リテーナ92の中間に位置する。これら上部リテーナ92と中間リテーナ88との間に圧縮コイルスプリング86が設けられ、中間リテーナ88と下部リテーナ90との間に圧縮コイルスプリング84が設けられる。本実施例においては、上部リテーナ92がスプリング84,86を外周部から覆う形状とされている。上部リテーナ92、シリンダ本体78、下部リテーナ90等によりアブソーバハウジング40が構成され、シリンダ本体78においてロアアーム12に、マウント部98を介して、原則として、上下方向に相対移動不能に連結される。
また、シリンダ本体78は、外筒110と内筒112とを含み、それらの間がリザーバ室114とされている。ピストン80は、内筒112の内周側に摺動可能に嵌合されているのであり、下室104とリザーバ室114との間に設けられたベースバルブ体116を介して、下室104とリザーバ室114との間の作動液の流れが許容される。
液圧式のショックアブソーバ18においては、ピストン80に設けられた液通路、ベースバルブ体116に設けられた液通路を作動液が流れる場合に、それの流速に応じた抵抗力である減衰力が加えられる。
また、モータハウジング38の下部に設けられたゴム等の弾性部材130と、上部リテーナ92の上面132とによってサスバウンド側ストッパが構成され、上部リテーナ92の下面136とモータハウジング38に連結された連結部材の内側突部に設けられたの弾性部材138とによってサスリバウンド側ストッパが構成される。
サスペンションECU156は、実行部、記憶部、入出力部等を備えたコンピュータを主体とするものであり、記憶部には、サスペンション制御プログラム、性能検査プログラム等が記憶されている。サスペンションECU156には、報知部168が接続される。報知部168は、音声出力部、ディスプレイ、LED等の1つ以上を含むものであり、電磁サスペンションユニット4の性能変化を報知する。
図5のフローチャートで表されるサスペンション制御プログラムが予め定められた設定時間毎に実行される。
ステップ1(以下、S1と略称する。他のステップについても同様とする)において、ばね上加速度、ばね下加速度、車高等のデータが読み込まれ、S2において、それらデータ値に基づいて電動モータ50の目標出力が求められ、予め定められた規則に従って供給電流値である制御指令値が決定される。そして、制御指令値が各輪の駆動回路160に出力される。
なお、その他、電動モータ50は、車両の走行状態に基づいて制御されるようにすることもでき、その場合には、ヨーレイト、ステアリングホイールの操舵角、制動状態、駆動状態等に基づいて制御されることになる。
電磁サスペンションユニット4の伸縮は、電動アクチュエータ16における伸縮(中間マス140とばね上部144との間の相対移動)と、液圧式ショックアブソーバ18における伸縮(シリンダ本体78とピストン80との間の相対移動であり、中間マス140とばね下部142との相対移動であると考えることもできる)とを含む。
この電磁サスペンションユニット4は、図3のシミュレーションモデル200で表すことができる。シミュレーションモデル200において、路面とばね下部142との間に車輪2のタイヤ201が介在し、ばね下部142とばね上部144との間にエアスプリング20が介在し、モータハウジング38等と車体側部14との間にマウント部35が介在する。マウント部35は、互いに並列に配設されたスプリングおよびダンパと等価な部材として表される(VoigtModel)。
また、ばね上部144と中間マス140との間には、電動モータ50、運動変換機構77が介在する。ばね上部144と中間マス140との間には、電動モータ50の駆動力と慣性力とが作用するのである。
さらに、中間マス140とばね下部142との間には、液圧式ショックアブソーバ18と圧縮コイルスプリング84,86とが設けられる。ダンパとスプリングとが並列に設けられることになる。
このシミュレーションモデル200に基づいて、路面変化に起因する、ばね下部142,中間マス140,ばね上部144の上下方向の振動がシミュレートとされる。
液圧式ショックアブソーバ18の伸縮速度VSの実際値(実測値)VS*と推定値VS′とが比較される。実際値VS*は、車高センサ154による検出値Hの微分値と回転角センサ162(本実施例において、基準位置からの回転角θ*を検出する)の検出値θ*にねじ軸54のリードLを掛けた値の微分値とから算出される。このように、液圧式ショックアブソーバ18における伸縮を直接検出するセンサが設けられていないため、複数のセンサの検出値を用いて液圧式ショックアブソーバ18の伸縮速度VS*が算出されることになる。このことから、実際値VS*は算出値と称することができる。
VS*=dH*/dt−L・dθ*/dt・・・(1)
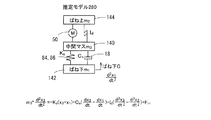
推定モデル210において、エアスプリング20のばね係数をKcとし、ばね上部144と中間マス140との間の慣性係数をIdとし、中間マス140とばね下部142との間の圧縮コイルスプリング84,86全体のばね定数をKsとし、液圧式ショックアブソーバ18における減衰係数をCsとした。また、ばね上部144,ばね下部142,中間マス140のそれぞれの質量を、それぞれ、m2,m1,m3とし、これらの上下方向の基準位置からの変位を、それぞれ、x2,x1,x3とする。上下方向の基準位置は、電動モータ50のフリーの状態で、静止している位置をいう。
慣性係数Id、ばね定数Kc、Ks、減衰係数Csは、設計者によって適宜設定できる値であるが、例えば、正常範囲内の大きさとしたり、新品の状態の大きさとしたりすること等ができる。
そして、この推定モデル210において、ばね上部144,中間マス140の各々について、図4(b)の式(4b1) 、(4b2)が示すように運動方程式が成立する。
ばね上部144においては、ばね下部142との間にエアスプリング20による弾性力{Kc・(x2−x1)}が加えられ、中間マス140との間に、慣性力[Id{(d2x2/dt2)−(d2x3/dt2)}]と電動モータ50による上下方向力Fmとが加えられる。そのため、ばね上部144の質量m2に加速度(d2x2/dt2)を掛けた値{m2・(d2x2/dt2)}が、加えられる力と等しくなり、式(4b1)が成立する。慣性力と電動モータ50による上下方向力Fmとは逆向きに加えられるのであり、電動モータ50により抵抗力が加えられることになる。
中間マス140においては、ばね上部144との間には、慣性力と電動モータ50による上下方向力Fmとが加えられ、ばね下部142との間には、圧縮コイルスプリング84,86による弾性力{Ks・(x3−x1)}と、液圧式ショックアブソーバ18における減衰力[Cs{(dx3/dt)−(dx1/dt)}]とが加えられるのであり、式(4b2)が成立する。
推定された中間マス140の絶対速度(dx3/dt)′に基づいて、液圧式ショックアブソーバ18の伸縮速度VS′が求められる。
VS′=(dx3/dt)′−(dx1/dt)* ・・・(2)
S11において、各データ(ばね下加速度、車高、モータ回転角等)が読み込まれ、S12において、ショックアブソーバ18の伸縮速度(以下、アブソーバ伸縮速度と称する)の実際値VS*が(1)式に従って取得され、S13において、オブザーバを利用して推定された中間マス140の絶対速度(dx3/dt)′等が読み込まれ、S14において、アブソーバ伸縮速度の推定値VS′が(2)式に従って取得される。S15において、実際値VS*と推定値VS′との差の絶対値|VS*−VS′|の予め定められた設定時間内の積算値ΣVSが取得され、S16において、判定しきい値Sthより大きいか否かが判定される。
Σ|VS*−VS′|=ΣVS
VS>Sth
本実施例において、アブソーバ伸縮速度の実際値、推定値は、S12、14において取得されるのであり、サイクルタイム毎に取得される離散値である。積算値は、離散値である各データの絶対値の、予め定められた設定時間内の総和である。積算値ΣVSは、設定時間内の平均的な値に関連する値の一例である。
積算値ΣVSが判定しきい値Sth以下である場合には、S17において、電磁サスペンションユニット4において、「性能変化していない」と判定されるが、積算値ΣVSが判定しきい値Sthより大きい場合には、電磁サスペンションユニット4において、「性能変化した状態にある」と判定される。
以下、S18以降において、性能変化した部位が特定される。
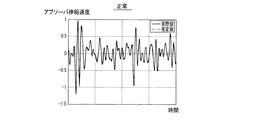
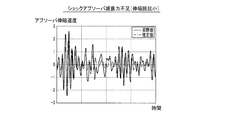
図8〜11には、同じパターンの路面入力が行われた場合の、実際値(実線)と推定値(一点鎖線)とを示す。推定値は、前述のように推定モデル210に基づいて推定された値であり、実際値は、図4のシミュレーションモデル200を用いて(それぞれ、性能が変化していない部位については推定モデル210における場合と同じ性能とし、性能が変化した部位については変化させる)、取得した結果である。
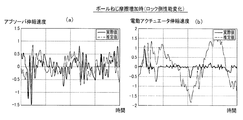
図8,図9(a),図10、図11(a)、(c)、(e)には、アブソーバ伸縮速度の実際値VS*と推定値VS′とを示す。図8には、電磁サスペンションユニット4において性能変化が生じていない場合の実際値VS*と推定値VS′とを示す。図8から、推定値VS′と実際値VS*とがよく一致していることが明らかである。
また、図9(a),図10,図11(a)、(c)、(e)には、電磁サスペンションユニット4のいずれかの部位において性能が変化している状態の実際値VS*と推定値VS′とを示す。いずれの図からも、推定値VS′と実際値VS*とが一致しないことが明らかであり、これらの差の絶対値の設定時間の間の積算値ΣVSが判定しきい値Sthより大きくなる。
Vb*=L・dθ*/dt
また、推定値Vb′は、ばね上部144の絶対速度の推定値(dx2/dt)′から中間マス140の絶対速度の推定値(dx3/dt)′を引いた値として取得される。ばね上部144の絶対速度の推定値(dx2/dt)′,中間マス140の絶対速度の推定値(dx3/dt)′は、それぞれ、オブザーバにより取得される。
Vb′=(dx2/dt)′−(dx3/dt)′
さらに、電動アクチュエータ伸縮速度の実際値、推定値の各々について、それの絶対値の設定時間内の積算値(平均関連実際値、平均関連推定値の一態様であり、以下、実際値の積算値、推定値の積算値と称する)Σ|Vb*|、Σ|Vb′|が、それぞれ、取得される。
そして、S19において、実際値の積算値Σ|Vb*|がロック側変化判定しきい値SRth(推定値の積算値Σ|Vb′|から設定値Δbを引いた値)より小さいか否かが判定される。
SRth=Σ|Vb′|−Δb
Σ|Vb*|<SRth
実際値の積算値Σ|Vb*|がロック側変化判定しきい値SRthより小さい場合には、S20において、電動アクチュエータ16において、性能がロック側に変化したと検出され、そのことが報知部168を介して報知される。例えば、ボールねじ機構77(ねじ軸54とナット部52との間)の摩擦が大きい状態、ねじ軸54とナット部52との間の噛み込み等によりねじ軸54が移動できなくなった状態、電動モータ50がロックした状態が該当する。
電動モータ50が予め定められた規則に従って制御されている場合には、電動アクチュエータ16の作動量は、ある程度大きな値となるはずである。また、電動モータ50が制御されていなくても、運動変換機構77がボールねじ機構を含むため、摩擦が小さい。伸縮速度に応じた減衰力が発生する程度である。そのため、路面入力に起因する電動アクチュエータ16における伸縮速度はある程度大きな値となるはずである。
それに対して、実際値の積算値Σ|Vb*|がロック側しきい値SRthより小さい場合には、電動アクチュエータ16において抵抗が大きくなったと検出することができる。
図9(b)には、ねじ軸54とナット部52との間の摩擦が非常に大きい場合(ロックに近い状態)の電動アクチュエータ伸縮速度の推定値Vb′、実際値Vb*を示す。図9(b)から、実際値Vb*が推定値Vb′に対して非常に小さくなることが明らかである。
なお、ロック側変化判定しきい値SRthは、推定値の積算値Σ|Vb′|に0より大きく1以下の係数γを掛けた値とすることもできる。
SAth=Σ|VS′|+Δs
Σ|VS*|>SAth
実際値の積算値Σ|VS*|が伸縮抵抗不足側判定しきい値SAthより大きい場合には、S22の判定がYESとなり、S23において、液圧式ショックアブソーバ18の性能が伸縮抵抗が不足する側に変化したと検出され、そのことが報知される。伸縮抵抗(摺動抵抗)が不足しているために、実際の伸縮速度の絶対値が推定値の絶対値より大きくなるのである。例えば、液漏れ、オイルの劣化に起因して減衰力が不足している状態、ピストン80とシリンダ本体78との間のシール部の劣化により摩擦が小さくなった状態、圧縮コイルスプリング84,86におけるばね力が不足している状態等が考えられる。
なお、ショックアブソーバ18全体に生じる抵抗力を減衰力を称する場合には、「伸縮抵抗が小さくなる側の性能変化」を、「減衰力不足側の性能変化」と称することもできる。
電動アクチュエータ16の性能がロック側に変化した場合、ショックアブソーバ18の性能が伸縮抵抗が小さくなる側に変化した場合のいずれの場合にもアブソーバ伸縮関連量の実際値等が推定値等より大きくなる。それに対して、本実施例においては、S18、19において、電動アクチュエータ16の伸縮速度の実際値Vb*と推定値Vb′とが比較されて、電動アクチュエータ16が正常である(性能がロック側に変化していない)と判定された場合に、S21、22が実行されるようにされている。したがって、S22により、アブソーバ伸縮速度の実際値VS*等が推定値VS′等より大きい場合には、ショックアブソーバ18の性能が伸縮抵抗が小さくなる側に変化したと検出することができるのである。
また、伸縮抵抗不足判定しきい値SAthは、推定値の積算値Σ|VS′|に1以上の係数αを掛けた値とすることもできる。
VH*=dH*/dt
また、ばね上ばね下間距離の変化速度の推定値VH′が、ばね上部144の絶対速度の推定値(dx2/dt)′からばね下部142の絶対速度の実際値(dx1/dt) *を引いた値として取得される。ばね下部142の絶対速度の実際値(dx1/dt)*は、ばね下加速度センサ152の検出値を積分して得られる。
VH′=(dx2/dt)′−(dx1/dt)*
そして、S25において、推定値VH′と実際値VH*との差の絶対値|VH*−VH′|の積載値ΣVHが取得され、S26において、特定しきい値Hthより小さいか否かが判定される。
ΣVH=Σ|VH*−VH′|
ΣVH<Hth
特定しきい値Hthより小さい場合には、S27において、液圧式ショックアブソーバ18において、伸縮抵抗が大きい側に性能が変化したと判定され、積載値ΣVHが、特定しきい値Hth以上である場合には、S28において、電動アクチュエータ16においてフリー側に性能が変化したと判定される。いずれにしても、性能が変化したこと、および、その部位が報知される。
また、本電磁サスペンションユニット4において、ショックアブソーバ18における伸縮が電動アクチュエータ16における伸縮に対して小さくなるように設計されているされている。そのため、ばね上ばね下間距離関連量の実際値等と推定値等との差が小さい場合には、液圧式ショックアブソーバ18に原因があると考えることができ、逆に、実際値等と推定値等との差が大きい場合には、電動アクチュエータ16に原因があると考えることができる。
以上のことから、ばね上ばね下間距離関連量の実際値等と推定値等との差が小さい場合には、ショックアブソーバ18の抵抗が大きくなったと判定され、差が大きい場合には、電動アクチュエータ16の性能がフリー側に変化したと判定されるのである。
図11(d)には、液圧式ショックアブソーバ18における伸縮抵抗が、推定モデル210で決まる状態よりわずかに大きい場合{図11(c)}のばね上ばね下間距離の変化速度の推定値VH′と実際値VH*とを示す。
図11(b)、(d)に示すように、いずれにしても、推定値VH′と実際値VH*との差は小さいことが明らかである。
また、図11(f)には、電動モータ50がフリーになった場合のばね上ばね下間距離の変化速度の推定値VH′と実際値VH*とを示す。図11(f)と、図11(b)、(d)とを比較すると、推定値VH′と実際値VH*との差が図11(f)に示す場合の方が大きいことが明らかである。
特定しきい値Hthは、これらを区別し得る大きさに設定されるのであり、例えば、図11(b)に示す場合の差の積載値Σ|VH*−VH′|より設定値だけ大きい値とすることができる。
また、性能変化が生じた箇所を特定して報知することができるため、仮に、交換する場合であっても、電磁サスペンションユニット4全体を交換する必要がなくなるという利点がある。
本実施例においては、ばね上加速度センサ150,ばね下加速度センサ152,車高センサ154,回転角センサ162,サスペンションECU156の図6のフローチャートで表される性能検査プログラムを記憶する部分、実行する部分等により性能変化検出装置が構成される。そのうちの、車高センサ154,回転角センサ152,サスペンションECU156のS12を記憶する部分、実行する部分等により実アブソーバ伸縮関連量取得部が構成され、ばね下加速度センサ152,電流計164、S13、14を記憶する部分、実行する部分等によりアブソーバ伸縮関連量推定部が構成され、S15〜18,22,23を記憶する部分、実行する部分等により比較型性能変化検出部が構成される。比較型性能変化検出部のうち、S15〜17を記憶する部分、実行する部分等により性能変化有無検出部が構成され、S22,23を記憶する部分、実行する部分等により伸縮抵抗不足検出部が構成される。実アブソーバ伸縮関連量取得部は実伸縮関連量算出部でもあり、アブソーバ伸縮関連量推定部はオブザーバ依拠伸縮関連量推定部でもある。
また、S18〜20,25〜28を記憶する部分、実行する部分等により性能変化部特定部が構成される。そのうちのS19,20を記憶する部分、実行する部分等によりロック側変化検出手段が構成される。
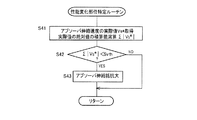
S41において、高周波数のショックアブソーバ18における伸縮速度の実際値VS*が取得されて、実際値VS*の絶対値の設定時間内の積載値である実際値の積算値Σ|VS*|が取得される。例えば、S12において取得された実際値VS*から高周波成分が抽出され、その抽出された高周波成分の実際値VS*から実際値の積算値Σ|VS*|を取得することができる。そして、S42において、実際値の積算値Σ|VS*|が予め定められた抵抗増加判定しきい値SVthより小さいか否かが判定される。
Σ|VS*|<SVth
抵抗増加判定しきい値より小さい場合には、判定がYESとなり、液圧式ショックアブソーバ18の性能が伸縮抵抗が大きい状態に変化したと判定される。
なお、S41〜43は、電磁サスペンションユニット4について高周波数の振動が加振装置等の外部装置から加えられる状態で実行されるようにすることができる。その場合には、所望の周波数の振動で振動させることが可能となる。
なお、上記実施例において、アブソーバ伸縮速度の推定値VS′の絶対値の積算値Σ|VS′|が予め定められた設定値(0より大きい値)以上である場合に、S41〜43が実行されるようにすることができる。伸縮速度の実際値VS*に高周波成分が含まれない場合もあり、それにも係わらず、S42の判定がYESとなって、伸縮抵抗が大きいと判定されるのを防止するためである。
Σ|Vb*|<Sbtha
なお、図6のフローチャートのS19の実行に使用されたロック側変化判定しきい値Sbthを相対的ロック側変化判定しきい値と称し、本実施例のロック側変化判定しきい値Sbthaを絶対的ロック側変化判定しきい値と称することもできる。
一方、中間マス140の変位、絶対速度の実際値x3*、(dx3/dt)*は、アブソーバ長さ、伸縮速度の実際値(H*−L・θ*)、VS*{=(dH/dt)*−(L・dθ/dt)*}とばね下部142の変位、絶対速度の実際値x1*、(dx1/dt)*とに基づいて取得することができる。
x3*=(H*−L・θ*)+x1* ・・・(3)
(dx3/dt)*=(dH/dt)*−L・(dθ/dt)*+(dx1/dt)* =VS*+(dx1/dt)* ・・・(4)
そして、中間マス移動関連量の実際値等と推定値等との差の絶対値が大きい場合には、電磁サスペンションユニット4の性能変化が検出される。
S11〜13において、上記実施例における場合と同様に、アブソーバ伸縮速度の実際値VS*が検出されて、中間マス140の絶対速度の推定値Vm′{(dx3/dt)′}が取得される。S14′において、中間マス140の絶対速度の実際値Vm*{(dx3/dt)*}が(4)式から算出され、S15′において、推定値Vm′と実際値Vm*との差の絶対値の積算値Σ|Vm′−Vm*|(=Σ|(dx3/dt)′−(dx3/dt)*|)が取得されて、S16′において、中間部材対応判定しきい値Smthと比較されて、性能変化の有無が検出される。
Σ|Vm′−Vm*|>Smth
差の絶対値の積載値Σ|Vm′−Vm*|が予め定められた中間部材対応判定しきい値Smth以下である場合には、電磁サスペンションユニット4において性能が変化していないと判定され、中間部材対応判定しきい値Smthより大きい場合には、性能変化した状態にあると判定される。以下、S18以降が同様に実行されれば、性能変化の部位を特定することが可能となる。
本実施例においては、ばね下加速度センサ152,電流計162,サスペンションECU156のS13を記憶する部分、実行する部分等により中間部材移動関連量推定部が構成され、S14′を記憶する部分、実行する部分等により中間部材移動関連量取得部が構成され、S16′を記憶する部分、実行する部分等により中間部材対応性能変化検出部が構成される。
ばね上ばね下間の距離の変化速度VHについても同様に、ばね上ばね下間距離の実際値H*と推定値H′とが比較されるようにすることができ、電動アクチュエータ伸縮速度につても、伸縮量あるいは長さ(本実際例においては、伝達部材82の底面と車体側部14との間の長さ)の実際値Lb*と推定値Lb′とが比較されるようにすることもできる。
さらに、性能変化の判定においては複数回連続して同じ検出結果が得られた場合に、検出結果が確定されるようにすることができる。
また、検出結果に、ヒステリシスを設けることができる。すなわち、性能変化が検出された場合には、性能変化判定条件とは異なる条件(しきい値を小さくする等、正常に近いとされる条件)が満たされた場合に、性能変化でないと判定されるようにすることができる。それにより、性能変化であるか否かの判定結果が頻繁に変わる(判定結果のハンチングが生じること)ことを回避することができる。
その場合の一例を図13に示す。図13のフローチャートは、性能検査プログラムの一部であり、S11〜21,24〜28の実行は、上記実施例における場合と同様に実行される。
本実施例においては、アブソーバ伸縮速度の実際値VS*の実際値の積算値Σ|VS*|が、伸縮抵抗不足判定しきい値SAth{Σ|VS′|+Δs}より大きいか否かが判定される場合において、設定値Δsが2段階で設定され、伸縮抵抗不足判定しきい値SAthも2段階で設定される。
第1伸縮抵抗不足判定しきい値SAth1=Σ|VS′|+Δs1
第2伸縮抵抗不足判定しきい値SAth2=Σ|VS′|+Δs2
Δs1>Δs2
S22aにおいて、アブソーバ伸縮速度の実際値の積算値Σ|VS*|が第1伸縮抵抗不足判定しきい値SAth1(Σ|VS′|+Δs1)より大きいか否かが判定され、S22bにおいて、第2伸縮抵抗不足判定しきい値SAth2より大きいか否かが判定される。第1伸縮抵抗不足判定しきい値SAth1より大きい場合には、S23aにおいて、ショックアブソーバ18の伸縮抵抗の不足の程度が大(伸縮抵抗が非常に小さい)とされ、第1伸縮抵抗不足判定しきい値SAth1以下で第2伸縮抵抗不足判定しきい値SAth2より大きい場合には、伸縮抵抗の不足の程度が小であるとされ、そのことが報知される。
このように、性能変化の程度が複数段階で検出され、報知されるようにすれば、運転者は、電磁サスペンションユニット4の性能の変化状態を詳細に知ることができる。
また、電磁サスペンションユニット4の性能変化を評価する段階で、本発明を適用すれば、詳細に性能変化の状態を取得することが可能となる。
本実施例においては、サスペンションECU156のS22a、b、23a、bを記憶する部分、実行する部分等により性能変化レベル検出部が構成される。
その場合の性能検査プログラムの一例を図14に示す。本性能検査プログラムも、車両の走行中において実行される。本実施例においては、さらに、各輪毎の電動モータ50の回転角度(電動作動関連量の一例であり、電動アクチュエータ伸縮量である)の実際値θ*が比較され、それに基づいて、性能変化が検出される。
S51において、前後左右の車輪の電磁サスペンションユニット4FL、FR、RL、RR(以下、車輪位置を一般的にijで表す。i=F,R、j=R,L)の各々について、ショックアブソーバ18の伸縮速度の実際値VSij*が(1)式に従って取得され、S52において、それぞれの絶対値の積算値Σ|VSij*|が取得され、S53において、前後左右各輪2の電磁サスペンションユニット4の各々について取得された積算値の平均値[Σ|VSij*|]が取得される。
そして、S54において、前後左右の各電磁サスペンションユニット4ijの各々について、順番に、検査対象車輪について伸縮速度の実際値の積算値Σ|VSij*|が積算値の平均値[Σ|VSij*|]より設定値ΔV1以上大きいか否かが判定される。
検査対象車輪についての実際値の積算値Σ|VSij*|が、平均値より設定値ΔV1以上大きい場合には、S55において、減衰力不足であると判定され、そうでない場合には、S56において、否性能変化判定カウンタNijが1増加させられる。
S57において、検査対象車輪についての値Σ|VSij*|が平均値より設定値ΔV2以上小さいか否かが、各輪毎に順番に判定される。検査対象車輪についての値が平均値より設定値ΔV2以上小さい場合には、S58において、減衰力が大きいと判定され、そうでない場合には、S59において、否性能変化判定カウンタNijが1増加させられる。
S54,57の両方の判定がYESとなることはないため、液圧式ショックアブソーバ18ijにおいて性能変化が検出された場合には、いずれか一方の判定がNOとなり、否性能変化判定カウンタNijのカウント値は1となる。液圧室ショックアブソーバ18ijにおいて性能変化が検出されなかった場合には、否性能変化判定カウンタNijのカウント値は2となる。
次に、S65において、検査対象輪の累積回転角度θij*が平均値より設定値Δθ2以上小さいか否かが、順番に判定される。検査対象車輪についての累積回転角度θij*が平均値[θij*]より設定値Δθ2以上小さい場合には、S66において、ロック側の性能変化であると判定される。そうでない場合には、S67において、カウント値が1増加させられる。
S68において、否性能変化判定カウンタNijのカウント値が4であるか否かが判定される。4である場合には、ショックアブソーバ18,電動モータ50においては性能変化は生じていないと考えられる(S69)。その後S70において、否性能変化判定カウンタのカウント値が0とされる。
なお、設定値ΔV1,ΔV2、設定値Δθ1,Δθ2は、予め定められた固定値であっても、平均値[Σ|VSij*|]、[θij*]で決まる値であってもよい。平均値[Σ|Vsij*|]と設定値ΔV1,ΔV2とによってアブソーバ伸縮関連量についての設定範囲が決定され、平均値[θij*]と設定値Δθ1,Δθ2とによってモータ回転数についての設定範囲が決定される。
本実施例において、車高センサ154,回転角センサ162、サスペンションECU156のS51〜59を記憶する部分、実行する部分等により各輪比較型性能変化検出部が構成され、回転角センサ164,S60〜67を記憶する部分、実行する部分等により各輪比較型電動アクチュエータ性能変化検出部が構成され、そのうちのS60を記憶する部分、実行する部分、回転角センサ164等により電動作動関連量取得部が構成される。
本実施例においては、図16のフローチャートで表される性能検査プログラムが実行される。本性能検査プログラムは、上記実施例において実行されるプログラムとほぼ同じであるが、S24〜28の実行が異なる。推定モデル280においては、サスペンションスプリング20が考慮されていないため、ばね上ばね下間の距離(車高)の変化速度VHに基づくより、低周波数のアブソーバ伸縮速度の推定値VS′と実際値VS*とが比較される方が望ましい。
そこで、S81において、アブソーバ伸縮速度の実際値VS*、推定値VS′がそれぞれローパスフィルタで処理され、S82において、処理された値に基づき、実際値、推定値の絶対値の積算値Σ|VS*|、Σ|VS′|がそれぞれ取得される。S83において、実際値の積算値Σ|VS*|が特定しきい値Hsth(推定値の積算値Σ|VS′|から設定値Δm引いた値)より小さいか否かが判定される。
Hsth=Σ|VS′|−Δm
Hsth>Σ|VS*|
実際値の積算値Σ|VS*|が特定しきい値Hsthより小さい場合には、S84において、電動アクチュエータ16の性能がフリー側に変化したと判定される。
このように、簡略したモデルを使用することもできるのであり、その分、推定のための演算を容易にすることができる。
図17に示す電磁サスペンションユニット300において、車輪側部12と車体側部14との間に、サスペンションスプリング308と、電動アクチュエータ310と、液圧式ショックアブソーバ312とが互いに並列に設けられる。
液圧式ショックアブソーバ312は、シリンダ本体314と、シリンダ本体314に摺動可能に嵌合されたピストン316とを含み、シリンダ本体314が車輪側部12に連結され、ピストン316のピストンロッド318がねじ軸320の内周側を貫通して、車体側部14に連結されている。ピストン316には、上室と下室とを連通させる連通路が設けられ、連通路の流路面積が電磁バルブ322によって調整可能とされている。
シリンダ本体314と車体側部14との間には、外筒330,内筒332とが互いに摺動可能に嵌合されている。外筒330が、シリンダ本体314に上下方向に相対移動不能に取り付けられ、内筒332が車体側部14に原則として上下方向に相対移動不能に取り付けられている。外筒330と内筒332とは、一対のガイド溝と、キーとの係合により、上下方向に相対移動可能かつ相対回転不能に嵌合されている。
サスペンションスプリング308は、車体側部14と外筒330(シリンダ本体314)との間に設けられる。
電動アクチュエータ310は、電動モータ340と、電動モータ340の駆動力を外筒330に伝達する力伝達機構342とを含む。力伝達機構342は、電動モータ340の出力軸に相対回転不能に取り付けられたねじ軸320と、ねじ軸320に螺合するナット部材344と、ナット部材344に固定されるとともに外筒330に固定された長手部材346とを含む。
車輪側部12と車体側部14との間に上下方向の力が加えられると、それに伴って、サスペンションスプリング308が伸縮させられ、ショックアブソーバ312が伸縮させられる。
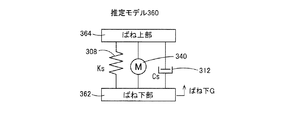
一方、ばね上ばね下間距離の推定値は、図18の推定モデル360に基づいて取得される。推定モデル360において、ロアアーム12,シリンダ本体314、外筒330等によってばね下部362が構成され、内筒332,車体側部14、ピストン316およびピストンロッド318等によりばね上部364が構成される。サスペンションスプリング308のばね定数がKsとされ、ショックアブソーバ312の減衰係数がCs(可変)とされる。上記実施例における場合と同様に、ばね下部362の変位、絶対速度と電動モータ340の出力Fmとから、ばね上部364の変位、絶対速度が推定され、それによって、ショックアブソーバ312の伸縮量、伸縮速度の推定値を取得することができる。
そして、実際値等が推定値等に対して大きい場合には、電動モータ340の性能がフリー側に変化した場合、液圧式ショックアブソーバ312の性能が伸縮抵抗が不足する側に変化した場合の少なくとも一方であると検出される。
また、実際値等が推定値等に対して大きい場合には、液圧式ショックアブソーバ312において伸縮抵抗が大きくなる側に性能が変化した場合、電動モータ340の性能がロック側に変化した場合の少なくとも一方であると検出される。
このように、電磁サスペンションユニットの構造は、問わないのであり、種々な構造の電磁サスペンションユニットにおいて本発明を適用し、性能変化を検出することができる。
また、走行中に性能変化が検出されるようにされていたが、そのようにすることは不可欠ではなく、停止中に車両を加振させることにより性能変化を検出することもできる。例えば、設定時間の間、電動アクチュエータを強制的に作動させて、振動させた後に、電動モータへの供給電流を停止させる。その後のショックアブソーバの伸縮の状態に基づけば、性能変化を取得することができるのである。
その他、本発明は、前記(発明の開示)の項に記載の態様の他、当業者の知識に基づいて種々の変更、改良を施した態様で実施することができる。
Claims (11)
- 車両の車輪に対応して、車体側部と車輪側部との間に設けられた(a)液圧式のショックアブソーバと、(b)前記車体側部と前記車輪側部との間に上下方向力を付与する電動アクチュエータとを備えた電磁サスペンションユニットと、
前記電磁サスペンションユニットに上下方向の振動が加えられている状態において、前記ショックアブソーバにおける上下方向の伸縮量と伸縮速度との少なくとも一方を含むアブソーバ伸縮関連量の実際値を取得する実アブソーバ伸縮関連量取得部を含み、その実アブソーバ伸縮関連量取得部によって取得された前記アブソーバ伸縮関連量の実際値に基づいて前記電磁サスペンションユニットにおける性能変化を検出する性能変化検出装置と
を含む電磁サスペンションシステムにおいて、
前記ショックアブソーバと前記電動アクチュエータとが、前記車体側部と前記車輪側部との間に互いに直列に設けられ、前記実アブソーバ伸縮関連量取得部が、前記車体側部と前記車輪側部との間の距離の変化量と変化速度との少なくとも一方を含むばね上ばね下間距離関連量の実際値と、前記電動アクチュエータの作動量と作動速度との少なくとも一方を含む電動作動関連量の実際値とから前記アブソーバ伸縮関連量の実際値を取得する実伸縮関連量算出部を含むことを特徴とする電磁サスペンションシステム。 - 前記性能変化検出装置が、(a)前記アブソーバ伸縮関連量を推定するアブソーバ伸縮関連量推定部と、(b)そのアブソーバ伸縮関連量推定部によって推定された前記アブソーバ伸縮関連量の推定値と前記実アブソーバ伸縮関連量取得部によって取得された前記アブソーバ伸縮関連量の実際値とを比較して、前記電磁サスペンションユニットにおける性能変化を検出する比較型性能変化検出部とを含む請求項1に記載の電磁サスペンションシステム。
- 前記比較型性能変化検出部が、前記アブソーバ伸縮関連量の推定値と実際値との差の絶対値の予め定められた設定時間内の平均的な値に関連する値が予め定められた判定しきい値より大きい場合に、前記電磁サスペンションユニットの性能が変化した状態にあると検出する性能変化有無検出部を含む請求項2に記載の電磁サスペンションシステム。
- 前記比較型性能変化検出部が、前記アブソーバ伸縮関連量の実際値の絶対値の予め定められた設定時間内の平均的な値に関連する値である平均関連実際値が、前記アブソーバ伸縮関連量の推定値の絶対値の前記設定時間内の平均的な値に関連する平均関連推定値で決まる伸縮抵抗不足判定しきい値より大きい場合に、前記ショックアブソーバの性能が伸縮抵抗不足側に変化した状態にあると検出する伸縮抵抗不足検出部を含む請求項2または3に記載の電磁サスペンションシステム。
- 前記性能変化検出装置が、前記比較型性能変化検出部によって前記電磁サスペンションユニットにおいて性能が変化したと検出された場合に、(x)前記車体側部と前記車輪側部との間の距離の変化量と変化速度との少なくとも一方を含むばね上ばね下間距離関連量の実際値と推定値との差の絶対値の予め定められた設定時間内の平均的な値に関連する平均関連値が予め定められた特定しきい値より大きい場合に、前記電動アクチュエータの性能がフリー側に変化した状態にあると検出する手段と、(y)前記ばね上ばね下間距離関連量の実際値と推定値との差の前記平均関連値が前記特定しきい値以下である場合に、前記ショックアブソーバの性能が伸縮抵抗が大きくなる側に変化した状態にあると検出する手段とのうちの少なくとも一方を含む請求項2ないし4のいずれか1つに記載の電磁サスペンションシステム。
- 前記ショックアブソーバと前記電動アクチュエータとが、前記車輪側部と前記車体側部との間に、中間部材を介して互いに直列に連結され、
前記アブソーバ伸縮関連量推定部が、(a)前記電磁サスペンションユニットに上下方向の振動が加えられている状態において、前記中間部材の上下方向の移動量と移動速度との少なくとも一方を含む中間部材移動関連量を推定する中間部材移動関連量推定部と、(b)その中間部材移動関連量推定部によって推定された前記中間部材移動関連量の推定値と前記車両のばね下部の上下方向の移動量と移動速度との少なくとも一方を含むばね下部移動関連量の実際値とから、前記アブソーバ伸縮関連量の推定値を取得する中間部材依拠伸縮関連量推定部とを含む請求項2ないし5のいずれか1つに記載の電磁サスペンションシステム。 - 前記ショックアブソーバと前記電動アクチュエータとが、前記車体側部と前記車輪側部との間に、中間部材を介して互いに直列に連結され、
前記性能変化検出装置が、(a)前記電磁サスペンションユニットに上下方向の振動が加えられている状態において、前記中間部材の上下方向の移動量と移動速度との少なくとも一方を含む中間部材移動関連量を推定する中間部材移動関連量推定部と、(b)前記中間部材移動関連量の実際値を前記アブソーバ伸縮関連量の実際値と前記車両のばね下部の上下方向の移動量と移動速度との少なくとも一方を含むばね下部移動関連量の実際値とから取得する中間部材移動関連量取得部と、(c)それら中間部材移動関連量の実際値と推定値との差の絶対値の予め定められた設定時間内の平均的な値に関連する平均関連値が予め定められた中間部材対応判定しきい値より大きい場合に、前記電磁サスペンションユニットの性能が変化した状態にあると検出する中間部材対応性能変化検出部とを含む請求項1ないし6のいずれか1つに記載の電磁サスペンションシステム。 - 前記ショックアブソーバと前記電動アクチュエータとが、前記車輪側部と前記車体側部との間に、中間部材を介して互いに直列に連結され、
前記性能変化検出装置が、(a)前記電磁サスペンションユニットについて作成された予め定められたモデルに基づき、前記車両のばね下部の上下方向の移動量の実際値および移動速度の実際値と、前記電動アクチュエータによって付与される上下方向力の実際値とから、前記車両のばね上部の上下方向の移動量と移動速度との少なくとも一方を含むばね上部移動関連量と、前記中間部材の上下方向の移動量と移動速度との少なくとも一方を含む中間部材移動関連量とを推定するオブザーバと、(b)そのオブザーバによって推定された前記ばね上部移動関連量の推定値から前記中間部材移動関連量の推定値を引いて前記電動アクチュエータの作動量と作動速度との少なくとも一方を含む電動作動関連量の推定値を取得する電動作動関連量推定値取得部と、(c)前記電動アクチュエータの電動作動関連量の実際値の絶対値の予め定められた設定時間内の平均的な値に関連する平均関連実際値が、前記電動作動関連量推定値取得部によって取得された推定値の絶対値の前記設定時間内の平均的な値に関連する平均関連推定値で決まるロック側変化判定しきい値より小さい場合に、前記電動アクチュエータの性能がロック側に変化した状態にあると検出するロック側変化検出手段とを含む請求項1ないし7のいずれか1つに記載の電磁サスペンションシステム。 - 前記性能変化検出装置が、前記電磁サスペンションユニットにおける性能変化の程度を段階的に検出する性能変化レベル検出部を含む請求項1ないし8のいずれか1つに記載の電磁サスペンションシステム。
- 前記電磁サスペンションユニットが、前記車両の前後左右の各輪に対応して設けられたものであり、前記性能変化検出装置が、前記前後左右の各輪毎の電磁サスペンションユニットの各々について前記実アブソーバ伸縮関連量取得部によって取得された前記アブソーバ伸縮関連量の実際値の絶対値の予め定められた設定時間内の平均的な値に関連する平均関連実際値同士を比較して、前後左右の各輪の前記ショックアブソーバの各々の性能変化を検出する各輪比較型性能変化検出部を含み、かつ、その各輪比較型性能変化検出部が、(a)前記前後左右の各輪のうちの検査対象車輪についてのアブソーバ伸縮関連量の平均関連実際値が、前後左右の各輪のアブソーバ伸縮関連量の平均関連実際値の平均的な値で決まる設定範囲の下限値より小さい場合に、前記検査対象車輪の前記ショックアブソーバの性能が伸縮抵抗が大きくなる側に変化した状態にあると検出する手段と、(b)検査対象車輪についての前記アブソーバ伸縮関連量の平均関連実際値が、前記設定範囲の上限値より大きい場合に、前記検査対象車輪の前記ショックアブソーバの性能が伸縮抵抗が小さくなる側に変化した状態にあると検出する手段との少なくとも一方を含む請求項1ないし9のいずれか1つに記載の電磁サスペンションシステム。
- 前記電磁サスペンションユニットが、前記車両の前後左右の各輪に対応して設けられたものであり、前記性能変化検出装置が、前記電動アクチュエータの作動量と作動速度との少なくとも一方を含む電動作動関連量の実際値を取得する電動作動関連量取得部と、前記前後左右の各輪毎の電磁サスペンションユニットの各々について、前記電動作動関連量取得部によって取得された電動作動関連量の実際値同士を比較することにより、前記前後左右の各輪毎の前記電動アクチュエータの各々の性能変化を検出する電動アクチュエータ性能変化検出部とを含む請求項1ないし10のいずれか1つに記載の電磁サスペンションシステム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2008/071804 WO2010064291A1 (ja) | 2008-12-01 | 2008-12-01 | 電磁サスペンションシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2010064291A1 JPWO2010064291A1 (ja) | 2012-04-26 |
| JP5115624B2 true JP5115624B2 (ja) | 2013-01-09 |
Family
ID=42232956
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010509614A Expired - Fee Related JP5115624B2 (ja) | 2008-12-01 | 2008-12-01 | 電磁サスペンションシステム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8793052B2 (ja) |
| EP (1) | EP2364866B1 (ja) |
| JP (1) | JP5115624B2 (ja) |
| CN (1) | CN101821119B (ja) |
| WO (1) | WO2010064291A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9987899B2 (en) | 2016-03-30 | 2018-06-05 | Hyundai Motor Company | Apparatus and method for determining mounting state of electronic control unit of electronically controlled suspension system |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8465025B2 (en) * | 2010-08-31 | 2013-06-18 | Oshkosh Corporation | Gas spring assembly for a vehicle suspension |
| US8262100B2 (en) * | 2010-09-28 | 2012-09-11 | Georges Thomas | Vehicle height adjustment suspension device |
| DE102010042673A1 (de) * | 2010-10-20 | 2012-04-26 | Deere & Company | Stabilisierungsvorrichtung für ein Kraftfahrzeug |
| FI20125132L (fi) * | 2012-02-07 | 2013-08-08 | Waertsilae Finland Oy | Vaimenninelementin virheellisen toiminnan havainnointi |
| FR2991237A1 (fr) * | 2012-05-29 | 2013-12-06 | Alexandre Forestier | Systeme de generation d'energie electrique pour vehicule automobile |
| DE112013003296T5 (de) * | 2012-06-29 | 2015-03-26 | Hitachi Automotive Systems, Ltd. | Krafterzeugungsmechanismus |
| US10564071B2 (en) | 2014-05-28 | 2020-02-18 | Showa Corporation | Method and system for inspecting damping force variable mechanism, and method for inspecting pressure damping device |
| FR3032686B1 (fr) * | 2015-02-18 | 2017-03-10 | Messier Bugatti Dowty | Atterrisseur d'aeronef comprenant une tige lineaire telescopique |
| CN110997362B (zh) * | 2017-05-08 | 2023-07-28 | 苹果公司 | 主动悬架系统 |
| JP6480983B2 (ja) * | 2017-06-16 | 2019-03-13 | 本田技研工業株式会社 | 電磁サスペンション装置 |
| US10899340B1 (en) | 2017-06-21 | 2021-01-26 | Apple Inc. | Vehicle with automated subsystems |
| US11124035B1 (en) | 2017-09-25 | 2021-09-21 | Apple Inc. | Multi-stage active suspension actuator |
| JP6989445B2 (ja) * | 2018-06-01 | 2022-01-05 | 本田技研工業株式会社 | 電磁サスペンション装置 |
| IL260472B (en) | 2018-07-08 | 2020-03-31 | Israel Aerospace Ind Ltd | Load limiter with energy absorting element |
| CN109080399B (zh) * | 2018-07-30 | 2021-10-12 | 江苏大学 | 一种可实现自供能的混合电磁悬架及其控制方法 |
| US11634167B1 (en) | 2018-09-14 | 2023-04-25 | Apple Inc. | Transmitting axial and rotational movement to a hub |
| CN111137090B (zh) * | 2018-11-05 | 2021-09-07 | 宝沃汽车(中国)有限公司 | 主动悬架系统以及车辆 |
| KR102589031B1 (ko) * | 2018-12-06 | 2023-10-17 | 현대자동차주식회사 | 액티브 서스펜션 제어유닛 및 액티브 서스펜션 제어방법 |
| US11511587B2 (en) * | 2018-12-27 | 2022-11-29 | Continental Automotive Systems, Inc. | Integrated crosslink valve |
| US11084349B2 (en) * | 2019-01-31 | 2021-08-10 | Tenneco Automotive Operating Company Inc. | Leaf spring and actuator control systems and methods |
| JP6840184B2 (ja) * | 2019-04-12 | 2021-03-10 | 本田技研工業株式会社 | 電動サスペンション装置 |
| JP6923591B2 (ja) * | 2019-04-12 | 2021-08-18 | 本田技研工業株式会社 | 電動サスペンション装置 |
| US11345209B1 (en) | 2019-06-03 | 2022-05-31 | Apple Inc. | Suspension systems |
| JP7367652B2 (ja) * | 2020-10-07 | 2023-10-24 | トヨタ自動車株式会社 | 車両用プレビュー制振制御装置及び方法 |
| CN112549892B (zh) * | 2020-12-04 | 2022-02-15 | 江苏大学 | 附加刚度阻尼可调的二级减振液电式主动悬架及工作方法 |
| CN113983981A (zh) * | 2021-10-22 | 2022-01-28 | 重庆长安汽车股份有限公司 | 阻尼连续可调减振器的簧上和簧下位移的获取方法 |
| CN117465180B (zh) * | 2023-10-31 | 2024-05-17 | 西南交通大学 | 面向驾乘体验提升的可调负刚度空簧总成及系统控制方法 |
| CN117719554B (zh) * | 2024-02-18 | 2024-04-26 | 成都磁速科技有限公司 | 高温超导磁悬浮轨道巡检预警系统 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6079030U (ja) * | 1983-11-05 | 1985-06-01 | 日産自動車株式会社 | シヨツクアブソ−バの異常検出装置 |
| JPH06344745A (ja) * | 1993-06-14 | 1994-12-20 | Aisin Seiki Co Ltd | サスペンション制御系の脱調検出装置 |
| JPH07444B2 (ja) * | 1985-08-16 | 1995-01-11 | マツダ株式会社 | 車高調整装置 |
| JP2005035486A (ja) * | 2003-07-18 | 2005-02-10 | Toyota Motor Corp | 車両懸架装置 |
| JP3629137B2 (ja) * | 1997-03-03 | 2005-03-16 | トヨタ自動車株式会社 | 車両用サスペンション装置のための電気制御装置 |
| JP2005162021A (ja) * | 2003-12-03 | 2005-06-23 | Toyota Motor Corp | 車両安定化制御装置 |
| JP2006143146A (ja) * | 2004-11-24 | 2006-06-08 | Toyota Motor Corp | 車両用サスペンション装置 |
| JP2006168400A (ja) * | 2004-12-13 | 2006-06-29 | Kayaba Ind Co Ltd | 異常検出装置 |
| JP2008296802A (ja) * | 2007-06-01 | 2008-12-11 | Toyota Motor Corp | 車両用サスペンションシステム |
| JP2009023624A (ja) * | 2007-07-24 | 2009-02-05 | Toyota Motor Corp | 車両用サスペンションシステム |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6079030A (ja) | 1983-10-04 | 1985-05-04 | Sumitomo Chem Co Ltd | 硬化促進効果を有するエポキシ樹脂組成物 |
| JP2834194B2 (ja) | 1989-07-14 | 1998-12-09 | 株式会社日立製作所 | ハードウエアモニタ |
| US5028073A (en) * | 1990-01-08 | 1991-07-02 | General Electric Company | Dynamic vehicle suspension system including electronically commutated motor |
| JP3046040B2 (ja) * | 1990-06-30 | 2000-05-29 | マツダ株式会社 | 車両のサスペンション装置 |
| US5681579A (en) | 1993-03-22 | 1997-10-28 | E.R. Squibb & Sons, Inc. | Polymeric support wound dressing |
| JP4275551B2 (ja) | 2004-03-11 | 2009-06-10 | カヤバ工業株式会社 | アクティブサスペンションの自己診断装置 |
-
2008
- 2008-12-01 EP EP08876946.8A patent/EP2364866B1/en not_active Not-in-force
- 2008-12-01 WO PCT/JP2008/071804 patent/WO2010064291A1/ja active Application Filing
- 2008-12-01 US US12/678,945 patent/US8793052B2/en active Active
- 2008-12-01 JP JP2010509614A patent/JP5115624B2/ja not_active Expired - Fee Related
- 2008-12-01 CN CN2008801085300A patent/CN101821119B/zh not_active Expired - Fee Related
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6079030U (ja) * | 1983-11-05 | 1985-06-01 | 日産自動車株式会社 | シヨツクアブソ−バの異常検出装置 |
| JPH07444B2 (ja) * | 1985-08-16 | 1995-01-11 | マツダ株式会社 | 車高調整装置 |
| JPH06344745A (ja) * | 1993-06-14 | 1994-12-20 | Aisin Seiki Co Ltd | サスペンション制御系の脱調検出装置 |
| JP3629137B2 (ja) * | 1997-03-03 | 2005-03-16 | トヨタ自動車株式会社 | 車両用サスペンション装置のための電気制御装置 |
| JP2005035486A (ja) * | 2003-07-18 | 2005-02-10 | Toyota Motor Corp | 車両懸架装置 |
| JP2005162021A (ja) * | 2003-12-03 | 2005-06-23 | Toyota Motor Corp | 車両安定化制御装置 |
| JP2006143146A (ja) * | 2004-11-24 | 2006-06-08 | Toyota Motor Corp | 車両用サスペンション装置 |
| JP2006168400A (ja) * | 2004-12-13 | 2006-06-29 | Kayaba Ind Co Ltd | 異常検出装置 |
| JP2008296802A (ja) * | 2007-06-01 | 2008-12-11 | Toyota Motor Corp | 車両用サスペンションシステム |
| JP2009023624A (ja) * | 2007-07-24 | 2009-02-05 | Toyota Motor Corp | 車両用サスペンションシステム |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9987899B2 (en) | 2016-03-30 | 2018-06-05 | Hyundai Motor Company | Apparatus and method for determining mounting state of electronic control unit of electronically controlled suspension system |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2364866A4 (en) | 2012-10-17 |
| EP2364866B1 (en) | 2013-08-28 |
| JPWO2010064291A1 (ja) | 2012-04-26 |
| US20110218707A1 (en) | 2011-09-08 |
| EP2364866A1 (en) | 2011-09-14 |
| US8793052B2 (en) | 2014-07-29 |
| CN101821119A (zh) | 2010-09-01 |
| WO2010064291A1 (ja) | 2010-06-10 |
| CN101821119B (zh) | 2012-03-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5115624B2 (ja) | 電磁サスペンションシステム | |
| RU2448000C2 (ru) | Система подвески для транспортного средства, содержащая электромагнитный привод | |
| Yagiz et al. | Backstepping control of a vehicle with active suspensions | |
| JP5224039B2 (ja) | サスペンション制御装置 | |
| KR101563448B1 (ko) | 차량 | |
| US20150061244A1 (en) | Method for tuning the suspension of a motor vehicle, and suspension strut | |
| JP4894545B2 (ja) | 車両用サスペンションシステム | |
| CN104487269A (zh) | 悬架控制系统和控制悬架装置的方法 | |
| Hudha et al. | Effects of control techniques and damper constraint on the performance of a semi-active magnetorheological damper | |
| Dong et al. | Neural network compensation of semi-active control for magneto-rheological suspension with time delay uncertainty | |
| Warczek et al. | The method for identification of damping coefficient of the trucks suspension | |
| Carratù et al. | Semi-active suspension system for motorcycles: From the idea to the industrial product | |
| Kaldas et al. | Development of a semi-active suspension controller using adaptive-fuzzy with kalman filter | |
| van Casteren et al. | Non-linear full-car modeling and sky-hook control for a direct-drive active suspension system | |
| Koch et al. | Design and modeling of a quarter-vehicle test rig for active suspension control | |
| JP4788675B2 (ja) | 車両用サスペンションシステム | |
| BR112018002795B1 (pt) | Dispositivo, uso de um dispositivo, e, método para influenciar um acoplamento mecânico | |
| JP2009023624A (ja) | 車両用サスペンションシステム | |
| Hanafi et al. | Speed effect to a quarter car ARX model based on system identification | |
| Kamalakkannan et al. | Input advanced control of semi active half car heave model | |
| Isermann et al. | Suspension Control Systems | |
| KR102413570B1 (ko) | 차량용 댐퍼의 수명 예지 방법 | |
| CN117465180B (zh) | 面向驾乘体验提升的可调负刚度空簧总成及系统控制方法 | |
| WO2014033519A1 (en) | Suspension control system and method of controlling suspension device | |
| Bagus et al. | Vibration control of FSAE quarter car suspension test rig using magnetorheological damper |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120918 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121001 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5115624 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151026 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |