JP5048824B2 - 車両用発電制御装置 - Google Patents
車両用発電制御装置 Download PDFInfo
- Publication number
- JP5048824B2 JP5048824B2 JP2010238536A JP2010238536A JP5048824B2 JP 5048824 B2 JP5048824 B2 JP 5048824B2 JP 2010238536 A JP2010238536 A JP 2010238536A JP 2010238536 A JP2010238536 A JP 2010238536A JP 5048824 B2 JP5048824 B2 JP 5048824B2
- Authority
- JP
- Japan
- Prior art keywords
- power generation
- vehicle
- regenerative
- generation control
- storage device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18109—Braking
- B60W30/18127—Regenerative braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2009—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed for braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/0023—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train
- B60L3/0046—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train relating to electric energy storage systems, e.g. batteries or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/16—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with provision for separate direct mechanical propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
- B60L58/13—Maintaining the SoC within a determined range
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
- B60L58/15—Preventing overcharging
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/24—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means
- B60W10/26—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means for electrical energy, e.g. batteries or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/30—Conjoint control of vehicle sub-units of different type or different function including control of auxiliary equipment, e.g. air-conditioning compressors or oil pumps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/11—Controlling the power contribution of each of the prime movers to meet required power demand using model predictive control [MPC] strategies, i.e. control methods based on models predicting performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/0097—Predicting future conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/12—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/26—Driver interactions by pedal actuation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2270/00—Problem solutions or means not otherwise provided for
- B60L2270/10—Emission reduction
- B60L2270/14—Emission reduction of noise
- B60L2270/145—Structure borne vibrations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/24—Energy storage means
- B60W2510/242—Energy storage means for electrical energy
- B60W2510/244—Charge state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
- B60W2520/105—Longitudinal acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/24—Energy storage means
- B60W2710/242—Energy storage means for electrical energy
- B60W2710/244—Charge state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/08—Predicting or avoiding probable or impending collision
- B60Y2300/095—Predicting travel path or likelihood of collision
- B60Y2300/0952—Predicting travel path or likelihood of collision the prediction being responsive to vehicle dynamic parameters
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Automation & Control Theory (AREA)
- Sustainable Development (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Energy (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Human Computer Interaction (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Eletrric Generators (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Description
ドライバビリティの悪化を防止することができる車両用発電制御装置を提供することを目的とする。
前記発電機が前記蓄電装置の充電時に必要とする発電トルクと、蓄電装置への充電を停止した時の発電トルクとの差が所定トルク差以内となるよう発電量を減少する方向に制限し
、通常発電制御手段は、回生発電制御手段が実行されているときは作動を停止するようにしたものである。
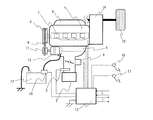
以下、この発明の実施の形態1による車両用発電制御装置について、図面を参照しながら説明する。図1は、この発明の実施の形態1の車両用発電制御装置における、電源系システム構成を示す構成図である。
なお、それぞれの点火コイル7は、対応する点火プラグと一体に構成されている。
吸気管5におけるエアクリーナ2の下流側に設けられた吸気量センサ3は、吸気管5を介して内燃機関1に吸入する吸気量を計測し、その計測値に対応する信号を出力する。
電動スロットル4は、スロットルバルブの開度を制御して内燃機関1への吸気量を調節する。
また、ブレーキスイッチ17は、ブレーキの操作を検出し、ブレーキの踏み込み有無を示す信号を出力する。
また、バッテリ12にはバッテリセンサ18が設けられ、バッテリ12の電圧および電流を検出する。これらの値に基づいてバッテリ12への充電有無や充電率を推定する。
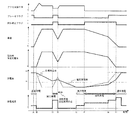
アクセル操作量は、アクセルセンサ16からの信号でありアクセル操作が無いときに操作量0となる。ブレーキフラグは、ブレーキスイッチ17からの信号でありブレーキの踏み込み時に1となる。燃料停止フラグは、内燃機関1への燃料供給が停止されている時に1となる。
また、停止直前では車両(駆動輪15)と内燃機関1が切り離され運動エネルギーの回収
は困難になるため、低車速時の回生時予測充電量は0に設定するのがよい。
時間Bで所定車速を超えると車速上昇に伴い回生時予測充電量は増加し目標充電率は低下するので、推定充電率が目標充電率より大きくなり、通常発電制御手段により発電機10の発電は停止する。その後は、推定充電率が目標充電率を下回るまでバッテリ12に蓄えられた電力を車両に供給するので、発電機は作動せず発電に掛かる燃料を削減できる。
ルク差以内となるよう、回生時の発電量を減少する方向に制限しておくのがよい。
この場合、エネルギー回収量は若干目減りすることとなるが、ドライバビリティを確保することが可能となる。さらに、バッテリ12の推定充電率が所定の充電率に近くになるにつれ発電量を徐々に低下させてもよく、発電停止時のショックをより低減することが可能となる。
バッテリ12が放電を続けた結果、時間Eで推定充電率と目標充電率が一致するので、その後は推定充電率が目標充電率を維持するよう、通常発電制御手段により発電制御が実行される。この場合、バッテリ12の充放電が行われないよう車両の使用する電力相当の発電を行えばよい。
また、運転者はアクセル操作量を0としただけで積極的な減速は望んでいないが、この状態で過大な回生発電によるトルクが掛かることで要求以上の減速感となれば、再度アクセルを踏み込むことになり、ドライバビリティが悪化するとともに、かえって燃費の悪化を招くこととなる。
よる発電時は、前述のように内燃機関1からエネルギーが供給されるため、発電トルクが車両の挙動へ影響を及ぼすことは少ない。また、停車後すぐに運転者により内燃機関1を停止されるとバッテリ12の充電率が低い状態で放置されることになり、バッテリ12の寿命低下や次回始動時の電力不足の懸念があるため、速やかに推定充電率が目標充電率となるよう発電する必要がある。
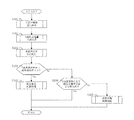
図3は、この発明の実施の形態1の車両用発電制御装置における、一定周期で実行される処理を示すフローチャートである。図3に示すフローチャートの処理は、0.01秒の一定周期で実行される。
F/B制御する際の目標値となる。
ブレーキ踏み込みがある場合(Yes)は、ステップS203で発電トルク制限値に10Nmを設定し、ブレーキ踏み込みがない場合(No)は、ステップS204で発電トルク制限値に5Nmを設定する。
なお、本実施の形態1では、発電トルク制限値に一定値を使用したが、回生発電時のトルクは車両の運動エネルギーから供給されるため、車速、変速比で変化させてもよい。
発電トルク制限値を適切に設定することで、ドライバビリティを確保しつつ、より多くの回生エネルギーの回収が可能となる。
発電F/B処理は、バッテリ12の推定充電率が発電F/B設定充電率になるよう、先のステップ203ないしステップ204で設定した発電トルク制限値に基づく範囲内で発電機10の発電電流をF/B制御するものである。また、バッテリ12が受け入れることのできる電流および電圧ならびに発電機10の最大発電電流で制限される範囲で発電制御されることは言うまでもない。
車両に供給している電力は、発電機10の発電電力とバッテリ12の充電に使用している電力の差から求められ、得られた電力と、あらかじめコントロールユニット13に格納している発電機10における発電電力と発電トルクの特性とを比較して、車両供給電力に対応する発電トルクが求められる。
なるトルクの差が所定トルク差以内となるよう、回生発電量を減少する方向に制限するので、回生発電時に効率よく蓄電装置を充電することができるとともに、回生発電時の発電トルク変化によるドライバビリティの悪化を防止することができる。
3 吸気量センサ 4 電動スロットル
5 吸気管 6 排気管
7 点火コイル 8、11 プーリ
9 ベルト 10 発電機
12 バッテリ 13 コントロールユニット
14 変速機 15 駆動輪
16 アクセルセンサ 17 ブレーキスイッチ
18 バッテリセンサ
Claims (3)
- 車両の駆動力を発生する内燃機関と、前記車両または前記内燃機関から供給される運動エネルギーを電気エネルギーに変換する発電機と、前記発電機で発電された電気エネルギーを蓄えるとともに前記車両で必要な電力を供給する蓄電装置と、前記蓄電装置の電圧および電流を検出する電圧・電流検出手段と、前記電圧・電流検出手段が検出した電圧および電流から前記蓄電装置の充電率を推定する推定充電率算出手段と、前記蓄電装置の目標充電率を算出する目標充電率算出手段と、前記蓄電装置の推定充電率が前記目標充電率算出手段で算出した目標充電率より低い場合には、前記蓄電装置の推定充電率が目標充電率となるよう前記発電機の発電制御を行う通常発電制御手段と、前記車両の減速中でかつ前記内燃機関の燃料供給を停止している期間に、前記蓄電装置の充電率が過充電とならない所定充電率以下で前記発電機の発電制御を行う回生発電制御手段と、前記車両の走行速度を検出する車速検出手段と、前記車速検出手段で検出した車速に応じて減速時の回生発電における充電量を予測する回生時充電量予測手段とを備え、前記目標充電率算出手段は、前記回生時充電量予測手段で求めた回生時予測充電量の増加に伴って前記蓄電装置の目標充電率を低下させるとともに、前記回生発電制御手段は、前記発電機が前記蓄電装置の充電時に必要とする発電トルクと、蓄電装置への充電を停止した時の発電トルクとの差が所定トルク差以内となるよう発電量を減少する方向に制限し、前記通常発電制御手段は、前記回生発電制御手段が実行されているときは作動を停止することを特徴とする車両用発電制御装置。
- 前記回生発電制御手段における前記所定トルク差は、ブレーキ操作が有りブレーキが踏み込まれているときに比べ、ブレーキ操作の無い時に、より小さい値とすることを特徴とする請求項1に記載の車両用発電制御装置。
- 前記回生発電制御手段による発電が、前記車両に対する加速要求により終了した場合は、前記通常発電制御手段の作動を所定期間停止させることを特徴とする請求項1または請求項2に記載の車両用発電制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010238536A JP5048824B2 (ja) | 2010-10-25 | 2010-10-25 | 車両用発電制御装置 |
| US13/079,406 US8570000B2 (en) | 2010-10-25 | 2011-04-04 | Vehicle power-generation control apparatus |
| FR1155107A FR2966412B1 (fr) | 2010-10-25 | 2011-06-10 | Appareil de commande de production d'energie de vehicule |
| CN201110186177.1A CN102452323B (zh) | 2010-10-25 | 2011-06-23 | 车辆用发电控制装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010238536A JP5048824B2 (ja) | 2010-10-25 | 2010-10-25 | 車両用発電制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012092673A JP2012092673A (ja) | 2012-05-17 |
| JP5048824B2 true JP5048824B2 (ja) | 2012-10-17 |
Family
ID=45935373
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010238536A Expired - Fee Related JP5048824B2 (ja) | 2010-10-25 | 2010-10-25 | 車両用発電制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8570000B2 (ja) |
| JP (1) | JP5048824B2 (ja) |
| CN (1) | CN102452323B (ja) |
| FR (1) | FR2966412B1 (ja) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5377538B2 (ja) * | 2011-02-14 | 2013-12-25 | 株式会社東芝 | 蓄電装置とその設置・運用方法 |
| US8720618B1 (en) * | 2011-03-28 | 2014-05-13 | Aura Systems Inc. | Retrofitting a vehicle to transfer mechanical power out of an engine compartment |
| JP5803849B2 (ja) * | 2012-08-27 | 2015-11-04 | トヨタ自動車株式会社 | 蓄電システム |
| JP6015910B2 (ja) * | 2012-09-03 | 2016-10-26 | スズキ株式会社 | 車両用充電装置 |
| DE112013004514B4 (de) * | 2012-10-10 | 2025-04-30 | Scania Cv Ab | Erkennung und Nutzung freier Energie |
| US9083202B2 (en) * | 2012-12-18 | 2015-07-14 | Fca Us Llc | Alternator control for battery charging |
| CN103112364B (zh) * | 2013-02-27 | 2015-07-08 | 浙江吉利汽车研究院有限公司杭州分公司 | 一种汽车电平衡实时控制方法及装置 |
| CN104118425B (zh) * | 2013-04-26 | 2018-06-26 | 比亚迪股份有限公司 | 汽车的控制方法及汽车的动力系统 |
| JP6319053B2 (ja) * | 2014-11-06 | 2018-05-09 | トヨタ自動車株式会社 | モーターによって駆動する車両、および、車両に搭載される二次電池の充放電の制御方法 |
| CN107000603B (zh) * | 2015-03-20 | 2019-06-11 | 三菱自动车工业株式会社 | 车辆的电力控制装置 |
| US10953756B2 (en) * | 2015-07-15 | 2021-03-23 | Ford Global Technologies, Llc | Adaptive regenerative braking method and system |
| JP6501069B2 (ja) * | 2015-07-24 | 2019-04-17 | 三菱自動車工業株式会社 | 車両の回生制御装置 |
| JP2017030509A (ja) * | 2015-07-31 | 2017-02-09 | トヨタ自動車株式会社 | 電源制御装置 |
| CN105667340B (zh) * | 2015-12-29 | 2018-05-08 | 湖南南车时代电动汽车股份有限公司 | 一种混合动力车辆的驱动电机制动防抖方法 |
| JP6536457B2 (ja) * | 2016-04-06 | 2019-07-03 | 株式会社デンソー | 発電制御装置 |
| JP7003639B2 (ja) * | 2017-12-26 | 2022-01-20 | トヨタ自動車株式会社 | 電気自動車 |
| JP7143880B2 (ja) * | 2018-03-27 | 2022-09-29 | 三菱自動車工業株式会社 | ハイブリッド車両の発電制御装置 |
| CN108944572B (zh) * | 2018-07-25 | 2021-01-15 | 北京新能源汽车股份有限公司 | 一种转矩限制方法、装置及电动汽车 |
| JP7172837B2 (ja) * | 2019-04-26 | 2022-11-16 | トヨタ自動車株式会社 | 制動力制御装置 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08163706A (ja) | 1994-12-06 | 1996-06-21 | Mitsubishi Motors Corp | 電気自動車の回生制動制御装置 |
| JP3387273B2 (ja) * | 1995-06-12 | 2003-03-17 | いすゞ自動車株式会社 | ハイブリッド電気自動車の発電機制御装置 |
| US5941328A (en) * | 1997-11-21 | 1999-08-24 | Lockheed Martin Corporation | Electric vehicle with variable efficiency regenerative braking depending upon battery charge state |
| JP3839199B2 (ja) * | 1999-10-06 | 2006-11-01 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP3377040B2 (ja) * | 1999-10-08 | 2003-02-17 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP2001157306A (ja) * | 1999-11-26 | 2001-06-08 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP2001268719A (ja) * | 2000-03-23 | 2001-09-28 | Toyota Motor Corp | ハイブリッド車両のバッテリ充電制御装置 |
| JP2002058111A (ja) * | 2000-08-10 | 2002-02-22 | Mitsubishi Electric Corp | ハイブリッド電気自動車用発電制御装置 |
| JP4224781B2 (ja) * | 2003-06-16 | 2009-02-18 | 株式会社デンソー | 車両用電力制御システム |
| JP4543714B2 (ja) * | 2004-03-23 | 2010-09-15 | 日産自動車株式会社 | 組電池の容量調整装置および容量調整方法 |
| JP2007244036A (ja) * | 2006-03-06 | 2007-09-20 | Nissan Motor Co Ltd | 車両制御装置 |
| JP4321569B2 (ja) * | 2006-09-05 | 2009-08-26 | 日産自動車株式会社 | 車両の制御装置及び制御方法 |
| JP4442646B2 (ja) * | 2007-06-20 | 2010-03-31 | 株式会社デンソー | 車両用発電制御装置及び制御システム |
| JP4228086B1 (ja) * | 2007-08-09 | 2009-02-25 | トヨタ自動車株式会社 | 車両 |
| JP4909863B2 (ja) * | 2007-10-04 | 2012-04-04 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| FR2926048B1 (fr) * | 2008-01-09 | 2010-04-30 | Peugeot Citroen Automobiles Sa | Procede de controle des accelerations d'un vehicule hybride. |
| JP2010125956A (ja) * | 2008-11-27 | 2010-06-10 | Nissan Motor Co Ltd | 電動車両の制御システム |
| JP2010170925A (ja) * | 2009-01-26 | 2010-08-05 | Aisin Seiki Co Ltd | 燃料電池システム |
-
2010
- 2010-10-25 JP JP2010238536A patent/JP5048824B2/ja not_active Expired - Fee Related
-
2011
- 2011-04-04 US US13/079,406 patent/US8570000B2/en not_active Expired - Fee Related
- 2011-06-10 FR FR1155107A patent/FR2966412B1/fr not_active Expired - Fee Related
- 2011-06-23 CN CN201110186177.1A patent/CN102452323B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| FR2966412B1 (fr) | 2014-08-08 |
| US8570000B2 (en) | 2013-10-29 |
| CN102452323A (zh) | 2012-05-16 |
| US20120098502A1 (en) | 2012-04-26 |
| FR2966412A1 (fr) | 2012-04-27 |
| CN102452323B (zh) | 2014-06-04 |
| JP2012092673A (ja) | 2012-05-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5048824B2 (ja) | 車両用発電制御装置 | |
| JP4394061B2 (ja) | ベルト型ハイブリッド車両の回生制動制御方法 | |
| RU2619067C2 (ru) | Устройство управления зарядкой, способ управления зарядкой, компьютерная программа и носитель записи | |
| US10539111B2 (en) | Control device for an internal combustion engine, vehicle including the same and method for the same | |
| US9156467B2 (en) | Vehicle power generating device and power generation control method | |
| US9678495B2 (en) | Control apparatus for plug-in hybrid vehicle, and control method for the same | |
| AU2013385112A1 (en) | Charge control device, vehicle control device, vehicle, charging control method, and vehicle control method | |
| EP4059759B1 (en) | Vehicle control device, vehicle control method, and program | |
| JPWO2013084357A1 (ja) | ハイブリッド車両の制御装置 | |
| JP3700974B2 (ja) | エンジン制御装置 | |
| JP5450238B2 (ja) | 電動車両 | |
| KR101637304B1 (ko) | 토크 지령 생성 방법 및 장치 | |
| JP7172836B2 (ja) | 制動力制御装置 | |
| JP4072913B2 (ja) | 車両のバッテリ管理装置 | |
| CN107054100B (zh) | 用于运行车辆的电驱动部的方法以及带有电驱动部的车辆 | |
| JP2013038977A (ja) | 電池の寿命評価方法 | |
| JP6044176B2 (ja) | 車両用発電制御装置 | |
| WO2013132531A1 (ja) | エンジン制御装置及びエンジン制御方法 | |
| JP6019985B2 (ja) | 車両用電源装置 | |
| JP5699841B2 (ja) | ハイブリッド自動車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120424 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120529 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120703 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120719 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150727 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5048824 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |