JP5040407B2 - アキシャルギャップ型モータ及び圧縮機 - Google Patents
アキシャルギャップ型モータ及び圧縮機 Download PDFInfo
- Publication number
- JP5040407B2 JP5040407B2 JP2007103774A JP2007103774A JP5040407B2 JP 5040407 B2 JP5040407 B2 JP 5040407B2 JP 2007103774 A JP2007103774 A JP 2007103774A JP 2007103774 A JP2007103774 A JP 2007103774A JP 5040407 B2 JP5040407 B2 JP 5040407B2
- Authority
- JP
- Japan
- Prior art keywords
- yoke
- type motor
- axial gap
- gap type
- axial
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Landscapes
- Permanent Magnet Type Synchronous Machine (AREA)
- Compressor (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
Description
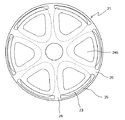
図1はこの発明の第1実施形態のアキシャルギャップ型モータの要部を軸方向に分解した斜視図を示している。
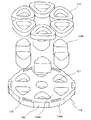
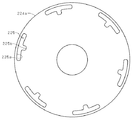
図3はこの発明の第2実施形態のアキシャルギャップ型モータのステータを軸方向に分解した斜視図を示している。この第2実施形態のアキシャルギャップ型モータは、バックヨーク124aの外周にコアカット部126を有する。以下の実施形態において、既述の実施形態と同様の構成については同一符号を付してその説明を省略する。
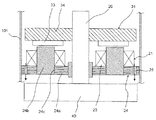
図5はこの発明の第3実施形態のアキシャルギャップ型モータの要部の断面図を示している。この第3実施形態のアキシャルギャップ型モータでは、軸流ファン40により発生する風の通り道が応力緩和孔25を経由する。
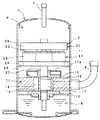
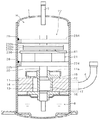
図6はこの発明の第4実施形態のアキシャルギャップ型モータを用いた圧縮機の縦断面図を示している。この圧縮機は、図6に示すように、ケーシングの一例としての密閉容器1と、上記密閉容器1内に配置されたアキシャルギャップ型モータ2と、密閉容器1内かつアキシャルギャップ型モータ2の下側に配置され、アキシャルギャップ型モータ2により駆動される圧縮機構部11とを備えている。ここで、上方向とは、上記密閉容器1の中心軸が水平面に対して傾斜しているか否かに関わらず、密閉容器1の中心軸に沿った上方向をいう。
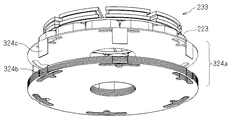
図7はこの発明の第5実施形態のアキシャルギャップ型モータの要部を軸方向に分解した斜視図を示している。
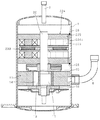
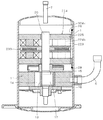
図10はこの発明の第6実施形態のアキシャルギャップ型モータが有する回転電機を搭載した圧縮機の縦断面図である。この第6実施形態のアキシャルギャップ型モータは、ロータの両側にステータを有する。ステータ及びロータの構造は上記第5実施形態と同じであるので説明を省略する。この圧縮機では、ステータが2つあり、何れのステータもバックヨークの外周端部においてケーシングの内側に溶接されている。
2,22 アキシャルギャップ型モータ
20 シャフト
21,121,221,231,234 ステータ
23,123,223 コイル
24,124,224 ステータコア
24a,124a,224a,324a バックヨーク
24b,124b,224b ティース
25,125,225 応力緩和孔
26 連結部
31,231 ロータ
33,233a 永久磁石
34 バックヨーク
40 軸流ファン
101 ケーシング
124c 固定部
126 コアカット部
127 貫通孔
Claims (23)
- 所定の回転軸に対して略直交する略環状の磁性体からなるヨーク(24a,124a,224a)と、上記ヨーク(24a,124a,224a)の少なくとも一方の端面側に軸方向に起立するように、周方向に設けられた磁性体からなるティース(24b,124b)と、上記ティース(24b,124b)に巻回されたコイル(23,123)とを有するステータ(21,121)と、
上記ステータ(21,121)の上記ティース(24b,124b)の先端に所定のエアギャップを隔てて対向すると共に、上記所定の回転軸を中心に回転するロータ(31)と、
上記ステータ(21,121)と上記ロータ(31)とを収納するケーシング(1)と
を備え、
上記ステータ(21,121)の上記ヨーク(24a,124a,224a)の外周が、上記ケーシング(1)の内周に固定され、
上記ヨーク(24a,124a,224a)の外周側かつ少なくとも上記ティース(24b,124b)よりも半径方向外側で上記ヨーク(24a,124a,224a)を軸方向に貫通する複数の孔(25,125,225)を設け、
前記孔と前記コイルの一部とが前記軸方向で互いに対向することを特徴とするアキシャルギャップ型モータ。 - 請求項1に記載のアキシャルギャップ型モータにおいて、
上記複数の孔(25,125,225)は、3以上であって、周方向にかつ略等間隔に配置されていることを特徴とするアキシャルギャップ型モータ。 - 請求項1または2に記載のアキシャルギャップ型モータにおいて、
互いに隣接する上記孔(25,125,225)間の連結部が、上記ティース(24b,124b)間の領域の半径方向外側にあることを特徴とするアキシャルギャップ型モータ。 - 請求項1に記載のアキシャルギャップ型モータにおいて、
上記ヨーク(124a)の外周部に、上記ケーシングの内周に接触しないコアカット部(126)が設けられ、
上記複数の孔(215)は、上記コアカット部(126)および上記コアカット部(125)近傍を除く領域に設けられていることを特徴とするアキシャルギャップ型モータ。 - 所定の回転軸に対して略直交する略環状の磁性体からなるヨーク(24a,124a,224a)と、上記ヨーク(24a,124a,224a)の少なくとも一方の端面側に軸方向に起立するように、周方向に設けられた磁性体からなるティース(24b,124b)と、上記ティース(24b,124b)に巻回されたコイル(23,123)とを有するステータ(21,121)と、
上記ステータ(21,121)の上記ティース(24b,124b)の先端に所定のエアギャップを隔てて対向すると共に、上記所定の回転軸を中心に回転するロータ(31)と、
上記ステータ(21,121)と上記ロータ(31)とを収納するケーシング(1)と
を備え、
上記ステータ(21,121)の上記ヨーク(24a,124a,224a)の外周が、上記ケーシング(1)の内周に固定され、
上記ヨーク(24a,124a,224a)の外周側かつ少なくとも上記ティース(24b,124b)よりも半径方向外側で上記ヨーク(24a,124a,224a)を軸方向に貫通する複数の孔(25,125,225)を設け、
互いに隣接する上記孔(25,125,225)間の最小間隔は、上記孔(25,125,225)が設けられた部分の上記ヨーク(24a,124a,224a)の厚さよりも小さいことを特徴とするアキシャルギャップ型モータ。 - 請求項4に記載のアキシャルギャップ型モータにおいて、
上記複数の孔(125)と上記コアカット部(126)との間の最小間隔は、上記孔(125)が設けられた部分の上記ヨーク(124a)の厚さよりも小さいことを特徴とするアキシャルギャップ型モータ。 - 所定の回転軸に対して略直交する略環状の磁性体からなるヨーク(24a,124a,224a)と、上記ヨーク(24a,124a,224a)の少なくとも一方の端面側に軸方向に起立するように、周方向に設けられた磁性体からなるティース(24b,124b)と、上記ティース(24b,124b)に巻回されたコイル(23,123)とを有するステータ(21,121)と、
上記ステータ(21,121)の上記ティース(24b,124b)の先端に所定のエアギャップを隔てて対向すると共に、上記所定の回転軸を中心に回転するロータ(31)と、
上記ステータ(21,121)と上記ロータ(31)とを収納するケーシング(1)と
を備え、
上記ステータ(21,121)の上記ヨーク(24a,124a,224a)の外周が、上記ケーシング(1)の内周に固定され、
上記ヨーク(24a,124a,224a)の外周側かつ少なくとも上記ティース(24b,124b)よりも半径方向外側で上記ヨーク(24a,124a,224a)を軸方向に貫通する複数の孔(25,125,225)を設け、
上記複数の孔(25,125,225)の領域を軸方向に投影した部分には、少なくとも上記コイル(23,123)の一部が重なることを特徴とするアキシャルギャップ型モータ。 - 請求項7に記載のアキシャルギャップ型モータにおいて、
軸流ファン(40)を駆動するアキシャルギャップ型モータであって、
上記軸流ファン(40)の風通路に、上記複数の孔(25)を配置したことを特徴とするアキシャルギャップ型モータ。 - 請求項7に記載のアキシャルギャップ型モータにおいて、
上記ケーシング(1)に設けられた吸入口から冷媒を吸入して、上記ケーシング(1)に設けられた吐出口から上記冷媒を吐出する圧縮機構部(11)を駆動するアキシャルギャップ型モータであって、
上記ステータ(21,121)は、上記吸入口から上記吐出口までの間に配置されていることを特徴とするアキシャルギャップ型モータ。 - 請求項1乃至9のいずれか1つに記載のアキシャルギャップ型モータにおいて、
上記ヨーク(24a,124a,224a)のうち、少なくとも上記ケーシング(1)の内周に焼きばめまたは圧入される部分と上記複数の孔(25,125,225)の周辺部分は、薄板が軸方向に積層された積層鋼板により一体に形成されていることを特徴とするアキシャルギャップ型モータ。 - 請求項10に記載のアキシャルギャップ型モータにおいて、
上記ティース(24b,124b)は、圧粉磁心からなり、上記ヨーク(24a,124a,224a)内に軸方向に所定の深さ埋め込まれているか、または、上記ヨーク(24a,124a,224a)内に軸方向に貫通するように埋め込まれていることを特徴とするアキシャルギャップ型モータ。 - 請求項1または請求項2に記載のアキシャルギャップ型モータにおいて、
上記ステータ(221)の上記ヨーク(24a,124a,224a)の外周のうち、上記複数の孔(25,125,225)が周方向に延在する範囲内で、上記ケーシング(1)の内周に溶接により固定された、アキシャルギャップ型モータ。 - 請求項12に記載のアキシャルギャップ型モータにおいて、
上記孔(25,225)は、少なくとも上記ティース(24b,224b)の間の径方向外側に延長した部分に設けられている、アキシャルギャップ型モータ。 - 請求項12または請求項13に記載のアキシャルギャップ型モータにおいて、
上記孔(25,125,225)は、上記コイル(23,123,223)を避けて貫通する部分を有する、アキシャルギャップ型モータ。 - 請求項14に記載のアキシャルギャップ型モータにおいて、
上記孔(225)は、周方向に隣接する上記コイル(223)の間でも上記ヨーク(224a)を軸方向に貫通する、アキシャルギャップ型モータ。 - 所定の回転軸に対して略直交する略環状の磁性体からなるヨーク(24a,124a,224a)と、上記ヨーク(24a,124a,224a)の少なくとも一方の端面側に軸方向に起立するように、周方向に設けられた磁性体からなるティース(24b,124b)と、上記ティース(24b,124b)に巻回されたコイル(23,123)とを有するステータ(21,121)と、
上記ステータ(21,121)の上記ティース(24b,124b)の先端に所定のエアギャップを隔てて対向すると共に、上記所定の回転軸を中心に回転するロータ(31)と、
上記ステータ(21,121)と上記ロータ(31)とを収納するケーシング(1)と
を備え、
上記ステータ(21,121)の上記ヨーク(24a,124a,224a)の外周が、上記ケーシング(1)の内周に固定され、
上記ヨーク(24a,124a,224a)の外周側かつ少なくとも上記ティース(24b,124b)よりも半径方向外側で上記ヨーク(24a,124a,224a)を軸方向に貫通する複数の孔(25,125,225)を設け、
上記ステータ(221)の上記ヨーク(24a,124a,224a)の外周のうち、上記複数の孔(25,125,225)が周方向に延在する範囲内で、上記ケーシング(1)の内周に溶接により固定され、
上記ヨーク(24a,124a,224a)は、上記溶接が施された箇所と上記孔(25,125,225)との間において、軸方向厚みに比べ、径方向厚みが小さい、アキシャルギャップ型モータ。 - 請求項12乃至請求項16の何れかに記載のアキシャルギャップ型モータにおいて、
上記孔(225)の外周側で、上記ヨーク(224a)の外周端部から軸方向に突出した溶接部(324c)を有し、
上記溶接部(324c)において上記ヨーク(224a)と上記ケーシング(1)とが溶接される、アキシャルギャップ型モータ。 - 請求項12乃至請求項17の何れかに記載のアキシャルギャップ型モータにおいて、
上記ヨーク(24a,124a,224a)は、軸方向に積層された鋼板からなる、アキシャルギャップ型モータ。 - 請求項12乃至請求項18の何れかに記載のアキシャルギャップ型モータにおいて、
上記ヨーク(24a,124a,224a)は、圧粉鉄心からなる、アキシャルギャップ型モータ。 - 請求項12乃至請求項19の何れか記載のアキシャルギャップ型モータにおいて、
上記ヨーク(24a,124a,224a)は、上記ケーシング(1)に圧入または焼きばめもされている、アキシャルギャップ型モータ。 - 請求項20に記載のアキシャルギャップ型モータにおいて、
上記溶接が施された箇所を除く、上記ヨーク(24a,124a,224a)の外周端部が上記ケーシング(1)と圧入または焼きばめされている、アキシャルギャップ型モータ。 - 請求項12乃至請求項19の何れかに記載のアキシャルギャップ型モータを搭載した圧縮機。
- 請求項22記載の圧縮機において、
冷媒がCO2である、圧縮機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007103774A JP5040407B2 (ja) | 2006-05-12 | 2007-04-11 | アキシャルギャップ型モータ及び圧縮機 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006133214 | 2006-05-12 | ||
| JP2006133214 | 2006-05-12 | ||
| JP2007103774A JP5040407B2 (ja) | 2006-05-12 | 2007-04-11 | アキシャルギャップ型モータ及び圧縮機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007330092A JP2007330092A (ja) | 2007-12-20 |
| JP5040407B2 true JP5040407B2 (ja) | 2012-10-03 |
Family
ID=38930163
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007103774A Expired - Fee Related JP5040407B2 (ja) | 2006-05-12 | 2007-04-11 | アキシャルギャップ型モータ及び圧縮機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5040407B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021145136A1 (ja) | 2020-01-14 | 2021-07-22 | ヤマハ発動機株式会社 | アキシャルギャップ型モータ |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4858565B2 (ja) * | 2009-03-31 | 2012-01-18 | ダイキン工業株式会社 | 圧縮機 |
| JP4858564B2 (ja) * | 2009-03-31 | 2012-01-18 | ダイキン工業株式会社 | 圧縮機 |
| JP5510079B2 (ja) * | 2010-06-02 | 2014-06-04 | 富士電機株式会社 | アキシャルギャップモータ |
| CN102893498A (zh) * | 2010-06-02 | 2013-01-23 | 爱信精机株式会社 | 旋转电机 |
| KR101113397B1 (ko) * | 2010-10-28 | 2012-02-28 | 대성전기공업 주식회사 | 회전형 액츄에이터 |
| JP6806210B1 (ja) * | 2019-09-26 | 2021-01-06 | 株式会社富士通ゼネラル | 圧縮機 |
| JP7525504B2 (ja) * | 2019-10-17 | 2024-07-30 | 住友電気工業株式会社 | 回転電機 |
| JP7426280B2 (ja) * | 2020-04-01 | 2024-02-01 | 三菱重工サーマルシステムズ株式会社 | 圧縮機 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001136721A (ja) * | 1999-08-26 | 2001-05-18 | Toyota Motor Corp | 軸方向間隙型永久磁石同期機 |
| JP4848665B2 (ja) * | 2005-04-28 | 2011-12-28 | ダイキン工業株式会社 | 圧縮機 |
| JP4618050B2 (ja) * | 2005-08-29 | 2011-01-26 | ダイキン工業株式会社 | 圧縮機 |
-
2007
- 2007-04-11 JP JP2007103774A patent/JP5040407B2/ja not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021145136A1 (ja) | 2020-01-14 | 2021-07-22 | ヤマハ発動機株式会社 | アキシャルギャップ型モータ |
| US12074489B2 (en) | 2020-01-14 | 2024-08-27 | Yamaha Hatsudoki Kabushiki Kaisha | Axial gap motor |
| US12081088B2 (en) | 2020-01-14 | 2024-09-03 | Yamaha Hatsudoki Kabushiki Kaisha | Axial-gap-dynamoelectric machine |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007330092A (ja) | 2007-12-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5040407B2 (ja) | アキシャルギャップ型モータ及び圧縮機 | |
| KR101025366B1 (ko) | 모터 및 압축기 | |
| CN101652914B (zh) | 旋转电机和压缩机 | |
| JP2008245504A (ja) | 電機子コアの製造方法及び電機子コア | |
| US20100259125A1 (en) | Armature core, armature, rotary electric machine and compressor | |
| JP4529500B2 (ja) | アキシャルギャップ回転電機 | |
| JP6999506B2 (ja) | ブラシレスモータ及びそのステータ | |
| JPWO2007114079A1 (ja) | モータおよびモータの製造方法および圧縮機 | |
| JP5359112B2 (ja) | アキシャルギャップ型回転電機及びそれを用いた圧縮機 | |
| JP2008228363A (ja) | 電機子用磁芯、電機子、回転電機、圧縮機 | |
| JP2003274579A (ja) | 密閉型圧縮機用電動機の固定子 | |
| JP4715832B2 (ja) | モータおよびモータの製造方法および圧縮機 | |
| JP2009077491A (ja) | ステータコア積層体およびモータ | |
| JP5446482B2 (ja) | 内転形電動機用固定子 | |
| JP5375534B2 (ja) | 圧縮機およびその製造方法 | |
| JP4253574B2 (ja) | 永久磁石式回転電機及びそれを用いた圧縮機 | |
| JP2007024035A (ja) | ポンプ | |
| TWI790636B (zh) | 電動機 | |
| JP2011102543A (ja) | 圧縮機 | |
| JP2021127759A (ja) | 圧縮機 | |
| JP2008220128A (ja) | アキシャルギャップ型回転電機及び圧縮機 | |
| JP2008172918A (ja) | アキシャルギャップ型モータおよび圧縮機 | |
| JP5120126B2 (ja) | 圧縮機 | |
| JP2013126267A (ja) | 回転電気機械および圧縮機 | |
| JP2007244175A (ja) | アウターロータ型モータおよび圧縮機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20091105 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091217 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120321 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120327 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120525 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120612 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120625 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150720 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |