JP5030392B2 - 医療装置の位置検出システムおよび医療装置誘導システム - Google Patents
医療装置の位置検出システムおよび医療装置誘導システム Download PDFInfo
- Publication number
- JP5030392B2 JP5030392B2 JP2005113082A JP2005113082A JP5030392B2 JP 5030392 B2 JP5030392 B2 JP 5030392B2 JP 2005113082 A JP2005113082 A JP 2005113082A JP 2005113082 A JP2005113082 A JP 2005113082A JP 5030392 B2 JP5030392 B2 JP 5030392B2
- Authority
- JP
- Japan
- Prior art keywords
- medical device
- magnetic
- coil
- magnetic field
- magnetic sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- XDTMQSROBMDMFD-UHFFFAOYSA-N C1CCCCC1 Chemical compound C1CCCCC1 XDTMQSROBMDMFD-UHFFFAOYSA-N 0.000 description 1
Images

















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00158—Holding or positioning arrangements using magnetic field
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/041—Capsule endoscopes for imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/73—Manipulators for magnetic surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/061—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body
- A61B5/062—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body using magnetic field
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/73—Manipulators for magnetic surgery
- A61B2034/731—Arrangement of the coils or magnets
- A61B2034/732—Arrangement of the coils or magnets arranged around the patient, e.g. in a gantry
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7232—Signal processing specially adapted for physiological signals or for diagnostic purposes involving compression of the physiological signal, e.g. to extend the signal recording period
Description
そのため、目視にて位置を確認できない所(体腔管路内など)へ誘導されたカプセル型内視鏡などの位置を検出する技術が提案されている(例えば、特許文献1から3参照。)。
しかしながら、上述の位置検出技術においては、位置検出を行うために、医用カプセルの電力を消費してしまうという問題があった。また、医用カプセル内に3軸の検知手段が必要になってしまい、医用カプセルを小型化できないという問題があった。
また、上述の位置検出技術においては、カプセル型内視鏡の位置は検出できるのだが、その方向までは検出できないという問題があった。
上述の技術においては、ロボット本体(カプセル型内視鏡)の方向を制御するとともにロボット本体を誘導していた。しかしながら、ロボット本体の実際の方向が、ロボット本体の位置および方向を制御する磁場に追従しているとは限らないため、ロボット本体の誘導精度が低下する恐れがあった。
しかしながら、上記作動範囲の外部には、駆動コイルや磁気センサの他にカプセル型内視鏡を誘導する電磁石なども配置されているため、駆動コイルや磁気センサを多く配置する空間が確保できず、駆動コイルや磁気センサや電磁石が干渉してしまうという問題があった。また、駆動コイルおよび磁気センサの数を干渉しないように制限すると、カプセル型内視鏡の位置によっては、その位置を検出しにくくなるという問題があった。
また、多くの磁場センサを使用する場合、カプセル内視鏡の位置または方向を検出する計算量が多くなってしまうという問題があった。
請求項1に係る発明は、被検体の体内に投入される医療装置の位置検出システムであって、前記医療装置に搭載した磁気誘導コイルと、前記医療装置の作動範囲の外部に配置され、前記磁気誘導コイルに誘導磁気を発生させる駆動コイルと、前記医療装置の作動範囲の外部に配置され、前記磁気誘導コイルにより発生された誘導磁気を検出するとともに、該誘導磁気により交流電圧を発生させる複数の磁気センサと、を備え、前記駆動コイルが、前記医療装置の作動範囲の各位置に前記医療装置が配置されたときに、前記磁気誘導コイルに対して異なる3方向以上の方向から磁気を作用させるとともに、前記3方向以上の磁気を作用させる方向のうち、少なくとも1つの方向が、他の2方向から形成される面に対して交差する方向となるように配置され、前記複数の磁気センサが、前記医療装置の作動範囲に対向して複数方向に向けて配置され、前記駆動コイルが、前記磁気誘導コイルを含む共振回路の共振周波数近傍の周波数帯域にわたって、前記磁気誘導コイルに誘導磁気を発生させ、前記複数の磁気センサから得られた前記交流電圧の振幅値の極大値および極小値の振幅差に基づいて前記医療装置の位置と方向とを計算する医療装置の位置検出システムを提供する。
その結果、医療装置の方向にかかわらず、常に磁気誘導コイルに誘導磁気を発生させることができるため、磁気センサにより誘導磁気を常に検知することができる。
より望ましくは、誘導磁気を一度に6個以上の磁気センサにより検出するように構成することが好ましい。このような構成をとることにより、空間位置、向き、回転などの医療装置の位置および姿勢に係る6つの情報を得ることができる。
磁気センサに働く誘導磁気の強度は、医療装置と磁気センサとの距離および医療装置と駆動コイルとの距離に影響される。そのため、医療装置の配置位置が、一の方向に配置された磁気センサに働く誘導磁気が弱くなる配置位置であっても、他の方向に配置された磁気センサにおいては、そこに働く誘導磁気が弱くならない配置位置となる。
その結果、医療装置の配置位置にかかわらず、常に磁気センサが誘導磁気を検知することができる。
医療装置について得られる情報としては、例えば、医療装置のX、Y、Z座標および磁気誘導コイルの中心軸に対して直交するとともに互いに直交する2つの軸回りの回転位相φ、θ、誘導磁気の強度の合計6つの情報を挙げることができる。そのため、6つ以上の磁場情報が得られれば、上述の6つの位置情報を求めることができ、医療装置の位置、方向および誘導磁気の強度を求めることができる。
また、交流磁界の周波数は共振周波数近傍の周波数帯域にわたって変動するため、例えば、環境条件(例えば温度条件)の変化によって共振回路の共振周波数が変化したり、共振回路の個体差による共振周波数のばらつきが存在したりしても、共振回路に共振を起こさせることができる。
また、例えば、磁気センサ選択手段が、磁気誘導コイルが発生した磁場に係る出力をする磁気センサを選択することにより、上記計算における計算量を減らすととともに、医療装置の位置および方向の検出精度を維持することができる。
そのため、上記次の計算時において測定に用いられる磁気センサ数を減らすことができ、測定プロセスを簡略化することができるとともに、医療装置の位置および方向の算出を早くすることができる。また、位置検出システムのハードウエアにかかる負荷を少なくでき、安価にすることができる。
なお、上記所定個数としては6個以上10個以下であることが望ましい。少なくとも磁気センサの数を6個とすることで、6自由度を有する医療装置の位置および方向を決定することができ、6個より多くすることで、磁気センサの出力に含まれるノイズの影響を排除することができる。また、磁気センサの数を10個以下とすることで位置計算装置における計算量が増えすぎることを防止することができる。
そのため、上記次の計算時において測定に用いられる磁気センサ数を減らすことができ、測定プロセスを簡略化することができるとともに、医療装置の位置および方向の算出を早くすることができる。また、各磁気センサの位置において形成される磁界の大きさ及び方向を推定するため、各磁気センサの出力を推定する方法と比較して、計算プロセスを省略することができ、位置計算装置における計算量を減らすことができる。
また、各磁気センサの位置において形成される磁界の大きさ及び方向を推定するため、各磁気センサの出力を推定する方法と比較して、計算プロセスを省略することができ、位置計算装置における計算量を減らすことができる。
また、各磁気センサと磁気誘導コイルとの距離を推定するため、各磁気センサの出力を推定する方法と比較して、計算プロセスを省略することができ、位置計算装置における計算量を減らすことができる。
なお、例えば、カプセル内視鏡が略円筒状の場合においては、カプセル内視鏡の長手軸線方向が挿入方向となる。
上記発明においては、複数の駆動コイルを選択的に使用する駆動コイル選択手段を有することが望ましい。
本発明によれば、駆動コイル選択手段が、駆動コイルにより発生する磁力線の方向と、磁気誘導コイルの中心軸線の方向とが略直行するような駆動コイルを除いて交流磁界を発生させる選択制御を行うことにより、演算処理にかかる負荷および時間を低減することができる。
上記発明においては、複数の駆動コイルが、互いに直交するように配置されていることが望ましい。
本発明によれば、駆動コイル選択手段による駆動コイルの選択制御の処理およびアルゴリズムを簡易にすることができる。
また同時に、医療装置の位置を検出することができるので、医療装置を所定の位置に誘導することができる。
また、電磁石の内側の空間は、被検体を配置可能な空間であって、その空間の周囲に、駆動コイルおよび磁気センサが配置されているので、医療装置を被検体の体内の所定位置に誘導することができる。
例えば、表示手段に表示された画像をオペレータが目視しながら医療装置を誘導する場合、上記表示される画像が医療装置の回転とともに回転する画像である場合と比較すると、上述のように、上記表示される画像が所定の回転位相の画像に変換されているほうが、医療装置を所定位置に誘導させやすい。
なお、例えば、カプセル内視鏡が略円筒状の場合においては、カプセル内視鏡の長手軸線方向が挿入方向となる。
また、本発明の医療装置誘導システムによれば、上記本発明の医療装置の位置検出システムにより検出された医療装置の位置に基づき、医療装置を正確に誘導することができるという効果を奏する。
〔第1の実施の形態〕
以下、本発明におけるカプセル型内視鏡誘導システムの第1の実施形態について図1から図13を参照して説明する。
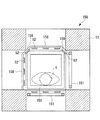
図1は、本実施形態におけるカプセル型内視鏡誘導システムの概略を示す図である。図2は、カプセル型内視鏡誘導システムの斜視図である。
カプセル型内視鏡誘導システム(医療装置誘導システム)10は、図1および図2に示すように、被検者(被検体)1の口部または肛門から体腔内に投入され、体腔内管路の内壁面を光学的に撮像し画像信号を無線で送信するカプセル型内視鏡(医療装置)20と、カプセル型内視鏡20の位置を検出する位置検出装置(位置計算装置、変化量検出手段)50と、検出されたカプセル型内視鏡20の位置および施術者の指示に基づきカプセル型内視鏡20を誘導する磁気誘導装置70と、カプセル型内視鏡20から送信された画像信号を表示する画像表示装置80と、から概略構成されている。
また、ヘルムホルツコイル71X、71Y、71Zは、その内部に直方体状の空間を形成するように配置されている。直方体状の空間は、図1に示すように、カプセル型内視鏡20の作動空間になるとともに、図2に示すように、被検者1が配置される空間にもなっている。
また、本実施の形態では、ヘルムホルツコイルと表記したが、図1および図2に示されるように、方形のコイルで構成されていてもよく、厳密にヘルムホルツコイル条件を満たさなければいけないというものではない。
回転磁界制御回路73には、位置検出装置50からカプセル型内視鏡20の現在向いている方向(カプセル型内視鏡20の回転軸(長手軸)Rの方向)データが入力されるとともに、施術者が入力装置74から入力したカプセル型内視鏡20の進行方向指示が入力されるようになっている。そして、回転磁界制御回路73からは、ヘルムホルツコイルドライバ72X、72Y、72Zを制御する信号が出力されるとともに、画像表示装置80にカプセル型内視鏡20の回転位相データが出力されるようになっている。
また、入力装置74としては、ジョイスティックを倒すことによりカプセル型内視鏡20の進行方向を指示する入力装置を用いている。
なお、入力装置74は、上述のようにジョイスティック方式のものを用いてもよいし、進行方向のボタンを押すことにより進行方向を指示する入力装置など、他の方式の入力装置を用いてもよい。
センスコイル52から位置検出装置50までの間には、位置検出装置50からの出力に基づきセンスコイル52からのカプセル型内視鏡20の位置情報などを含んだ交流電流を選択するセンスコイルセレクタ(磁気センサ選択手段)56と、センスコイルセレクタ56を通過した上記交流電流から振幅値を抽出し位置検出装置50へ出力するセンスコイル受信回路57とが配置されている。
ここで、ドライブコイル51は、図1および図3に示すように、ヘルムホルツコイル71X、71Y、71Zにより形成される略直方体形状の作動空間の上方(Z軸の正方向側)の四隅に斜めに配置されている。またドライブコイル51は、矩形形状のヘルムホルツコイル71X、71Y、71Zの角部を結ぶ略三角形状のコイルとして形成されている。このように、ドライブコイル51を上方に配置することにより、ドライブコイル51と被検者1との干渉を防止することができる。
なお、ドライブコイル51は、上述のように略三角形状のコイルであってもよいし、円形状など、さまざまな形状のコイルを用いることができる。
センスコイル受信回路57は、図4に示すように、入力されたカプセル型内視鏡20の位置情報を含む交流電圧の低周波成分を取り除くハイパスフィルタ(HPF)59と、上記交流電圧を増幅するプリアンプ60と、増幅された上記交流電圧に含まれる高周波を取り除くバンドパスフィルタ(BPF)61と、高周波を取り除いた上記交流電圧を増幅するアンプ(AMP)62と、上記交流電圧の振幅を検出して振幅値を抽出して出力する実効値検出回路(True RMS コンバータ)63と、振幅値をデジタル信号に変換するA/D変換器64と、デジタル化された振幅値を一時的に格納するメモリ65とから構成されている。
なお、上述のように、上記交流電圧の振幅値を抽出するのに実効値検出回路63を用いてもよいし、整流回路を用いて磁気情報を平滑化して電圧を検出することで振幅値を検出してもよいし、上記交流電圧のピークを検出するピーク検出回路を用いて振幅値を検出してもよい。
また、検出される交流電圧の波形は、磁気誘導コイル42の有無、位置により、ドライブコイル51に付加される波形に対する位相が変化する。この位相変化をロックインアンプなどで検出してもかまわない。
カプセル型内視鏡20は、図5に示すように、その内部に各種の機器を収納する外装21と、被検者の体腔内管路の内壁面を撮像する撮像部(撮像手段)30と、撮像部30を駆動する電池39と、前述したドライブコイル51により誘導磁気を発生させる誘導磁気発生部40と、カプセル型内視鏡20を駆動する駆動用磁石(磁石)45と、から概略構成されている。
また、外装21の本体の外周面には、回転軸Rを中心として断面円形の線材を螺旋状に巻いた螺旋部(螺旋機構)25が備えられている。
また、LED33は基板36Aより先端部23側に配置された支持部材38に、回転軸Rを中心として周方向に間隔をあけて複数配置されている。
駆動用磁石45の後端部24側には、基板36B上に配置されたスイッチ部46が備えられている。スイッチ部46は赤外線センサ47を有し、基板36Bおよびフレキシブル基板37Aを介して信号処理部34と電気的に接続されているとともに、基板36B、36C、36Dおよびフレキシブル基板37B、37Cを介して電池39と電気的に接続されている。
また、スイッチ部46は回転軸Rを中心として周方向に等間隔に複数配置されるとともに、赤外線センサ47が直径方向外側に面するように配置されている。本実施形態においては、スイッチ部46が4つ配置されている例を説明するが、スイッチ部46の数は4つに限られることなく、その個数がいくつであってもよい。
基板36Dの後端部24側の面には無線素子35が配置されている。無線素子35は、基板36A、36B、36C、36Dおよびフレキシブル基板37A、37B、37Cを介して信号処理部34と電気的に接続されている。
まず、カプセル型内視鏡誘導システム10の作用の概要について説明する。
カプセル型内視鏡20は、図1および図2に示すように、位置検出装置50および磁気誘導装置70内に横臥した被検者1の口部または肛門から体腔に投入される。投入されたカプセル型内視鏡20は、位置検出装置50によりその位置が検出されるとともに、磁気誘導装置70により被検者1の体腔内管路内を患部近傍まで誘導される。カプセル型内視鏡20は、患部までの誘導中および患部近傍において体腔内管路の内壁面を撮像する。そして、撮像した体腔内管路の内壁面のデータおよび患部近傍のデータを画像表示装置80に送信する。画像表示装置80は送信されてきた画像を表示部82に表示する。
位置検出装置50においては、図1に示すように、まず、正弦波発生回路53が位置検出装置50からの出力に基づき交流電流を発生し、交流電流はドライブコイルドライバ54へ出力される。発生される交流電流の周波数は数kHzから100kHzまでの範囲内の周波数であり、後述する共振周波数を含むように、時間に応じて周波数が上述の範囲内で変化(スイープ)している。なお、スイープする範囲は上述する範囲に限られることなく、より狭い範囲であってもよいし、より広い範囲であってもよく、特に限定されるものではない。
また、誘導磁気コイル42はコンデンサとともに共振回路43を形成しているので、交流磁場の周期が共振回路43の共振周波数と一致すると、共振回路43(誘導磁気コイル42)に流れる誘導電流は大きくなり、形成される誘導磁気も強くなる。さらに、誘導磁気コイル42の中心には、誘電性のフェライトからなる芯部材41が配置されているので、誘導磁場が芯部材41に集められ易く、形成される誘導磁気はさらに強くなる。
センスコイル受信回路57に入力された上記交流電圧は、図4に示すように、まずハイパスフィルタ59により、交流電圧に含まれる低周波成分が取り除かれ、プリアンプ60により増幅される。その後、バンドバスフィルタ61により高周波が取り除かれ、アンプ62により増幅される。このようにして不要な成分が取り除かれた交流電圧は、実効値検出回路63により交流電圧の振幅値が抽出される。抽出された振幅値はA/D変換器64によりデジタル信号化され、メモリ65に格納される。
メモリ65は、例えば正弦波発生回路53で発生される正弦波信号を共振回路43の共振周波数付近でスイープさせた1周期分に対応する振幅値を格納し、1周期分の振幅値をまとめて位置検出装置50へ出力している。
なお、測定条件により共振周波数よりも低い周波数で極小値をとり、共振周波数よりも高い周波数で極大値をとり、共振周波数で位相が最も進む場合もある。
このように、上記振幅差をセンスコイル52の出力とすることにより、環境条件(例えば温度)などによる磁場強度の変化に起因する上記振幅の変化をキャンセルすることができ、環境条件に影響されることなく、安定した精度でカプセル型内視鏡20の位置を求めることができる。
これら6つの情報を演算により推定するためには、少なくとも6つのセンスコイル52からの出力が必要であるが、カプセル型内視鏡20の位置の推定には、少なくとも1つの面に配置された9つのセンスコイル52からの出力が用いられているので、上記6つの情報を演算により求めることができる。
また、位置検出装置50は、磁界を形成するドライブコイル51を選定し、ドライブコイルセレクタ55に対して選定したドライブコイル51に交流電流を供給するように指示を出力する。このドライブコイル51の選定方法は、図7に示すように、ドライブコイル51から誘導磁気コイル42を結ぶ直線(ドライブコイル51の向き)と誘導磁気コイル42の中心軸線(カプセル型内視鏡20の回転軸R)とが略直交するドライブコイル51を除外する方法で行われるとともに、誘導磁気コイル42において作用する磁界の方向が一次独立となるよう、図8に示すように、3つのドライブコイル51に交流電流を供給するように選定されている。
より好ましい方法としては、ドライブコイル51が形成する磁力線の方向と、誘導磁気コイル42の中心軸線とが略直交するドライブコイル51を除外する方法が有効である。
なお、上述のように、ドライブコイル51を3つ選択して交流磁界を形成してもよいし、図9に示すように、全てのドライブコイル51により交流磁界を発生させてもよい。
ここで、説明を容易にするためセンスコイル52に識別子をつける。上述のようにセンスコイル52は27個あるので、各センスコイル52にs1からs27までの識別子をつける。
ここで、センスコイル52の空間での位置および方向は、識別子s1がつけられたセンスコイル52の場合、位置を(X(s1),Y(s1),Z(s1))、方向をベクトルNV(s1)で表記する。また、すでに求められているカプセル内視鏡20の位置を(X(c),Y(c),Z(c))、および方向をベクトルNV(c)と表記する。

磁気誘導装置70においては、図1に示すように、まず、施術者が入力装置74を介して回転磁界制御回路73へカプセル型内視鏡20に誘導方向を入力する。回転磁界制御回路73では、入力された誘導方向および位置検出装置50から入力されるカプセル型内視鏡20の方向(回転軸方向)に基づいて、カプセル型内視鏡20にかける平行磁界の方向および回転方向を決定する。
そして、上記平行磁界の方向を形成するために必要な各ヘルムホルツコイル71X、71Y、71Zの発生磁界強さを算出し、これら磁界を発生させるのに必要な電流値を算出する。
電流が供給されたヘルムホルツコイル71X、71Y、71Zは、それぞれ電流値に応じた磁界を発生し、これら磁界が合成されることにより、回転磁界制御回路73が決定した磁界方向を有する平行磁界が形成される。
カプセル型内視鏡20は、図5に示すように、まず、スイッチ部46の赤外線センサ47に赤外線が照射され、スイッチ部46は信号処理部34に対して信号を出力する。信号処理部34は、スイッチ部46からの信号を受け取ると、カプセル型内視鏡20に搭載されているイメージセンサ31、LED33、無線素子35および信号処理部34自身に電池39から電流を供給し、オン状態とする。
画像表示装置80においては、図1に示すように、まず、画像受信回路81がカプセル型内視鏡20から送信された圧縮画像信号を受信し、画像信号は表示部82へ出力されている。圧縮画像信号は、画像受信回路81または表示部82において復元され、表示部82により表示される。
また、表示部82は、回転磁界制御回路73から入力されるカプセル型内視鏡20の回転位相データに基づき、カプセル型内視鏡20の回転方向と逆方向に上記画像信号を回転処理してから表示している。
その結果、カプセル型内視鏡20の方向(回転軸Rの軸線方向)にかかわらず、常に誘導磁気コイル42に誘導磁気を発生させることができるため、センスコイル52により誘導磁気を常に検知することができ、常にその位置を正確に検出することができるという効果を奏する。
さらに、上記1方向に配置されたセンスコイル52の数が9つであるので、カプセル型内視鏡20のX、Y、Z座標およびカプセル型内視鏡20の回転軸Rに対して直交するとともに互いに直交する2つの軸回りの回転位相φ、θ、誘導磁気の強度の合計6つの情報を演算により求めるのに十分な入力を得ることができる。
また、交流磁気の周波数は共振周波数近傍の周波数帯域にわたってスイープされるため、例えば、環境条件(例えば温度条件)の変化によって共振回路43の共振周波数が変化したり、共振回路43の個体差による共振周波数のばらつきが存在したりしても、変化した共振周波数やばらついた共振周波数が上記周波数帯域内に含まれていれば、共振回路43に共振を起こさせることができる。
また、ヘルムホルツコイル71X、71Y、71Zの内側の空間は、被検者1を配置可能な空間であって、その空間の周囲に、ドライブコイル51およびセンスコイル52が配置されているので、カプセル型内視鏡20を被検者1の体内の所定位置に誘導することができる。
そのため、表示部82に表示された画像を施術者が目視しながらカプセル型内視鏡20を誘導する場合、表示される画像がカプセル型内視鏡20の回転とともに回転する画像である場合と比較すると、上述のように表示される画像が所定の回転位相の画像として表示されているほうが、施術者に見易く、カプセル型内視鏡20を所定位置に誘導させやすい。
図11において説明するカプセル型内視鏡20Aは、誘導磁気発生部の構成が異なるのと、その他の機器の配置が異なるため、この両者について説明し、その他の説明は省略する。
誘導磁気発生部43Aは、外装21と電池39などとの間に配置されるとともに、LED33の支持部材38から電池39までを覆うように配置されている。
パーマロイ膜41Bは、図12に示すように、磁性体材料をシート状の膜に形成したものである。また、パーマロイ膜41Bを芯部材41Aに巻回したときに、隙間tが形成されるようになっている。
このように、芯部材41Aと誘導磁気コイル42との間にパーマロイ膜41Bを配置することにより、誘導磁気発生部43Aにおいて発生する誘導磁気の強度を向上させることができる。
図13において説明するカプセル型内視鏡20Bは、誘導磁気発生部の構成が異なるのと、その他の機器の配置が異なるため、この両者について説明し、その他の説明は省略する。
誘導磁気発生部43Cは、外装21と電池39などとの間に配置されるとともに、LED33の支持部材38から電池39までを覆うように配置されている。
誘導磁気発生部43Cは、図12および図13に示すように、中心軸が回転軸Rと略一致する円筒形状に形成された芯部材41Aと、芯部材41Aの外周部に配置された誘導磁気コイル42Cと、芯部材41Aおよび誘導磁気コイル42Cの間に配置されたパーマロイ膜41Bと、誘導磁気コイル42Cと電気的に接続され、共振回路43を形成するコンデンサ(図示せず)とから形成されている。
誘導磁気コイル42Cは、駆動用磁石45が配置されている領域は疎に巻かれているとともに、先端部23側および後端部24側は密に巻かれている。
このようにすることで、信頼性のあるセンス52コイルの出力のみを抽出できるため、より精度の高い位置計算を実施できる。
次に、本発明の第1の実施形態の第1変形例について説明する。
本実施形態の変形例におけるカプセル型内視鏡誘導システムの基本構成は、第1の実施形態と同様であるが、第1の実施形態とは、カプセル型内視鏡の位置検出方法が異なっている。よって、本変形例においては、カプセル型内視鏡の位置検出方法のみを説明し、磁気誘導装置等の説明を省略する。
本変形例においては、センスコイル52の位置それぞれについて、カプセル内視鏡20に内蔵された磁気誘導コイル42が作り出す磁界の強さを以下の方法で計算し、求められた磁界の強さに基づいてセンスコイル52を選択している。
なお、磁気誘導コイル42の位置検出は、第1の実施形態と同様であるのでその説明を省略する。
具体的には、ビオザバールの法則の式より、ドライブコイル51に流れる電流の経路積分を行なうことで求めている。この演算により、ドライブコイル51が予め求められているカプセル内視鏡20(磁気誘導コイル42)の位置に作り出す磁場を求めることができ、この求められた磁場をベクトルBdV(c)と表記する。
つまり、位置検出装置50が、上記の式(2)および式(3)の演算を行なうことにより、各センスコイル52の位置における磁気誘導コイル42が形成する磁界の大きさ(磁界強度)Bが算出される。
なお、選択されるセンスコイル52の所定個数としては、上述のように6個以上10個以下とすることが望ましい。
このようにセンスコイル52を選択することで、全てのセンスコイル52の出力を測定しなくても、磁気誘導コイル42の位置および方向の計算に用いるのに適したセンスコイル52を選択でき、また、出力特性のよいセンスコイル52の出力のみを用いることができるため、位置および方向の計算効率を更に向上できる。
次に、本発明の第1の実施形態の第2変形例について説明する。
本実施形態の変形例におけるカプセル型内視鏡誘導システムの基本構成は、第1の実施形態と同様であるが、第1の実施形態とは、カプセル型内視鏡の位置検出方法が異なっている。よって、本変形例においては、カプセル型内視鏡の位置検出方法のみを説明し、磁気誘導装置等の説明を省略する。
本変形例においては、上述の第2変形例で求められた、誘導磁気コイル42により各センスコイル52の位置に形成された磁界に基づいて、各センスコイル52の出力を計算し、求められた出力に基づいてセンスコイル52を選択している。
具体的には、例えば、識別子s1がつけられたセンスコイル52の出力をV(s1)とすると、V(s1)は、下記の式(4)で表される。
ここで、A2はセンスコイルの特性で決まる比例定数である。
そして、次の計算時において位置検出装置50は、上記選択されたセンスコイル52の出力に基づいて、カプセル内視鏡20(磁気誘導コイル42)の位置及び方向を計算する。
なお、選択されるセンスコイル52の所定個数としては、上述のように6個以上10個以下とすることが望ましい。
このようにセンスコイル52を選択することで、全てのセンスコイル52の出力Vを測定しなくても、磁気誘導コイル42の位置および方向の計算に用いるのに適したセンスコイル52を選択でき、また、出力特性のよいセンスコイル52の出力Vのみを用いることができるので、位置および方向の計算効率を更に向上できる。
次に、本発明の第2の実施形態について図14および図15を参照して説明する。
本実施の形態のカプセル型内視鏡誘導システムの基本構成は、第1の実施の形態と同様であるが、第1の実施の形態とは、位置検出装置の構成が異なっている。よって、本実施の形態においては、図14および図15を用いて位置検出装置周辺のみを説明し、磁気誘導装置等の説明を省略する。
図14は、位置検出装置のドライブコイルおよびセンスコイルの配置を示す概略図である。
なお、位置検出装置のドライブコイルおよびセンスコイル以外の構成要素は第1の実施の形態と同じであるため、その説明を省略する。
ドライブコイル151としては、図に示すように、矩形形状のコイルを用いてもよいし、ヘルムホルツコイルを用いてもよい。
また、ドライブコイル151が互いに略直交して配置されることになるので、ドライブコイルセレクタ55によるドライブコイルの選択が容易になる。
このような配置とすることにより、被検者1と干渉することなくセンスコイル52を配置することができる。
次に、本発明の第3の実施形態について図16を参照して説明する。
本実施の形態のカプセル型内視鏡誘導システムの基本構成は、第1の実施の形態と同様であるが、第1の実施の形態とは、位置検出装置の構成が異なっている。よって、本実施の形態においては、図16を用いて位置検出装置周辺のみを説明し、磁気誘導装置等の説明を省略する。
図16は、位置検出装置のドライブコイルおよびセンスコイルの配置を示す概略図である。
なお、位置検出装置のドライブコイルおよびセンスコイル以外の構成要素は第1の実施の形態と同じであるため、その説明を省略する。
ドライブコイル251は、形成する交流磁場の方向が図中の矢印で示すように、互いに一次独立となるように配置されている。
次に、本発明の第3の実施形態の変形例について図17を参照して説明する。
本変形例のカプセル型内視鏡誘導システムの基本構成は、第3の実施の形態と同様であるが、第3の実施の形態とは、位置検出装置の構成が異なっている。よって、本実施の形態においては、図17を用いて位置検出装置周辺のみを説明し、磁気誘導装置等の説明を省略する。
図17は、位置検出装置のドライブコイルおよびセンスコイルの配置を示す概略図である。
なお、位置検出装置のドライブコイルおよびセンスコイル以外の構成要素は第3の実施の形態と同じであるため、その説明を省略する。
コイル支持部358は、カプセル型内視鏡20の作動範囲に対して外側へ凸なる曲面形状であり、センスコイル52は、上記曲面形状に沿うように配置されている。
なお、コイル支持部52の形状は、上述のように上記動範囲に対して外側へ凸なる曲面形状であってもよいし、その他の曲面形状であってもよく、特に限定するものではない。
以下、本発明におけるカプセル型内視鏡の位置検出システムについて図18を参照して説明する。
図18は、本発明におけるカプセル型内視鏡の位置検出システムの概略を示す図である。
なお、本発明におけるカプセル型内視鏡の位置検出システム410は、上述したカプセル型内視鏡誘導システム10の位置検出装置50のみから構成されているものである。そのため、カプセル型内視鏡の位置検出システム410の構成要素、作用および効果はカプセル型内視鏡誘導システム10と同様なので、図18を示してその説明を省略する。
例えば、上記の実施の形態においては、医療装置として被験者体腔内の像を撮像するカプセル型内視鏡を用いるもの適用して説明したが、このカプセル型内視鏡を用いるものに限られることなく、被験者体腔内に薬剤を放出する医療装置や、体腔内のデータを取得するセンサを備えた医療装置や、体腔内に所定期間留置される医療装置や、外部と情報等をやり取りする配線が接続された医療装置など、その他各種の医療装置に適用することができるものである。
(付記項1)
複数の駆動コイルを選択的に使用する駆動コイル選択手段を有するカプセル型内視鏡の位置検出システム。
本発明によれば、駆動コイル選択手段が、駆動コイルにより発生する磁力線の方向と、磁気誘導コイルの中心軸線の方向とが略直行するような駆動コイルを除いて交流磁界を発生させる選択制御を行うことにより、演算処理にかかる負荷および時間を低減することができる。
複数の駆動コイルが、互いに直交するように配置されているカプセル型内視鏡の位置検出システム。
本発明によれば、駆動コイル選択手段による駆動コイルの選択制御の処理およびアルゴリズムを簡易にすることができる。
駆動コイルまたは磁気センサの一方が、被検者を配置可能な空間の上部に配置されているカプセル型内視鏡誘導システム。
本発明によれば、被検者は、被験者を配置可能な空間の下部に位置するため、被験者を配置可能な空間の上部に配置された駆動コイルまたは磁気センサが、被検者と干渉することを防止することができる。
10 カプセル型内視鏡誘導システム(医療装置誘導システム)
20 カプセル型内視鏡(医療装置)
25 螺旋部(螺旋機構)
30 撮像部(撮像手段)
43 共振回路
42、42C 磁気誘導コイル
45 駆動用磁石(磁石)
50 位置検出装置(位置計算装置、変化量検出手段)
51、151、251 ドライブコイル(駆動コイル)
52 センスコイル(磁気センサ)
56 センスコイルセレクタ(磁気センサ選択手段)
71 3軸ヘルムホルツコイルユニット(磁界発生手段、電磁石)
73 回転磁界制御回路(磁界方向制御手段)
82 表示部(表示手段、画像制御手段)
410 カプセル型内視鏡の位置検出システム
R 回転軸(長手軸)
Claims (19)
- 被検体の体内に投入される医療装置の位置検出システムであって、
前記医療装置に搭載した磁気誘導コイルと、
前記医療装置の作動範囲の外部に配置され、前記磁気誘導コイルに誘導磁気を発生させる駆動コイルと、
前記医療装置の作動範囲の外部に配置され、前記磁気誘導コイルにより発生された誘導磁気を検出するとともに、該誘導磁気により交流電圧を発生させる複数の磁気センサと、を備え、
前記駆動コイルが、前記医療装置の作動範囲の各位置に前記医療装置が配置されたときに、前記磁気誘導コイルに対して異なる3方向以上の方向から磁気を作用させるとともに、前記3方向以上の磁気を作用させる方向のうち、少なくとも1つの方向が、他の2方向から形成される面に対して交差する方向となるように配置され、
前記複数の磁気センサが、前記医療装置の作動範囲に対向して複数方向に向けて配置され、
前記駆動コイルが、前記磁気誘導コイルを含む共振回路の共振周波数近傍の周波数帯域にわたって、前記磁気誘導コイルに誘導磁気を発生させ、
前記複数の磁気センサから得られた前記交流電圧の振幅値の極大値および極小値の振幅差に基づいて前記医療装置の位置と方向とを計算する医療装置の位置検出システム。 - 前記駆動コイルと前記磁気センサとが、前記医療装置の作動範囲を挟んで対向する位置に配置されている請求項1に記載の医療装置の位置検出システム。
- 前記磁気センサが、前記誘導磁気コイルから発生した磁場を繰り返し検出し、
前記磁気センサの出力に基づいて、前記医療装置の位置と方向とを繰り返し計算して求める位置計算装置と、
該位置計算装置における計算において、前記医療装置の位置及び方向を求める際に用いる前記磁気センサを前記複数の磁気センサから選択する磁気センサ選択手段と、を有する請求項1または請求項2に記載の医療装置の位置検出システム。 - 前記磁気センサが磁界を受けたときに発生する前記交流電圧の前記振幅値を記憶する記憶手段と、
前記磁気センサが発生した前記交流電圧の前記振幅値から前記記憶手段に記憶された前記交流電圧の振幅値を引くことにより、前記磁気センサが発生した前記交流電圧の振幅値の変化量を求める変化量検出手段と、を有し、
前記駆動コイルが、交流磁界を発生させ、
前記誘導磁気コイルが、前記駆動コイルの発生した交流磁界を受けることにより前記誘導磁気としての誘導磁界を発生させ、
前記記憶手段には、前記磁気センサが前記交流磁界のみを受けたときの前記交流電圧の振幅値が記憶され、
前記変化量検出手段が、前記磁気センサが前記交流磁界および前記誘導磁界を受けたときの前記交流電圧の振幅値から前記記憶手段に記憶された前記交流電圧の振幅値を引くことにより、前記磁気誘導コイルが発生した誘導磁界を求める請求項1から請求項3のいずれかに記載の医療装置の位置検出システム。 - 前記位置計算装置が、前記計算により求めた医療装置の位置および方向に基づいて、前記磁気誘導コイルが各前記磁気センサの位置に生成する前記誘導磁界を計算し、算出された誘導磁界から各前記磁気センサの出力を計算し、
前記磁気センサ選択手段が、算出された複数の前記磁気センサの出力の大きさに基づいて、前記次の計算時において前記医療装置の位置および方向を求める際に用いる前記磁気センサを決定する請求項3に記載の医療装置の位置検出システム。 - 前記磁気センサ選択手段が、前記磁気センサを、前記算出された複数の磁気センサの出力が大きい順に所定個数選択する請求項5に記載の医療装置の位置検出システム。
- 前記磁気センサ選択手段が、前記算出された複数の磁気センサの出力が所定の値より大きな磁気センサを選択する請求項5に記載の医療装置の位置検出システム。
- 前記位置計算装置が、前記計算により求めた医療装置の位置および方向に基づいて、前記磁気誘導コイルが各磁気センサの位置において形成する磁界の大きさ及び方向を推定し、
前記磁気センサ選択手段が、前記推定した各磁気センサの出力に基づいて、次の計算時において前記医療装置の位置および方向を求める際に用いる前記磁気センサを決定する請求項3に記載の医療装置の位置検出システム。 - 前記磁気センサ選択手段が、前記磁気センサを前記磁気誘導コイルが前記複数の磁気センサの位置において形成する磁界の強度が大きい順に所定個数選択する請求項8に記載の医療装置の位置検出システム。
- 前記位置計算装置が、前記計算により求めた医療装置の位置および方向に基づいて、各磁気センサと前記磁気誘導コイルとの距離を推定し、
前記磁気センサ選択手段が、前記推定した各磁気センサと磁気誘導コイルとの距離に基づいて、次の計算時において前記医療装置の位置および方向を求める際に用いる前記磁気センサを決定する請求項3に記載の医療装置の位置検出システム。 - 前記磁気センサ選択手段が、前記推定された前記磁気センサと前記磁気誘導コイルとの距離が所定の値より短い磁気センサを選択する請求項10に記載の医療装置の位置検出システム。
- 前記医療装置がカプセル内視鏡であり、前記カプセル内視鏡の被検体への挿入方向と、前記磁気誘導コイルの中心軸線の方向とが略同一になっている請求項1から請求項11のいずれかに記載の医療装置の位置検出システム。
- 複数の駆動コイルを選択的に使用する駆動コイル選択手段を有する請求項1から請求項12のいずれかに記載の医療装置の位置検出システム。
- 複数の駆動コイルが、互いに直交するように配置されている請求項1から請求項13のいずれかに記載の医療装置の位置検出システム。
- 請求項1から請求項14のいずれかに記載の位置検出システムと、
前記医療装置に搭載された磁石と、
該医療装置の作動範囲の外部に配置され、前記磁石に対して作用させる磁界を発生する磁界発生手段と、
該磁界発生手段により前記磁石に作用させる磁界の方向を制御する磁界方向制御手段と、を備える医療装置誘導システム。 - 前記磁界発生手段が、相互に直交する方向に対向配置される3対の枠体状の電磁石を備え、
該電磁石の内側に被検体を配置可能な空間が設けられるとともに、
該被検体を配置可能な空間の周囲に、前記駆動コイルおよび前記磁気センサが配置されている請求項15に記載の医療装置誘導システム。 - 前記磁界発生手段が、前記医療装置の周囲に回転磁界を発生させ、
前記医療装置の外面に、該医療装置の長手軸回りの回転力を長手軸方向の推進力に変換する螺旋機構が備えられている請求項15または請求項16に記載の医療装置誘導システム。 - 前記医療装置に、該医療装置の長手軸に沿う光軸を有する撮像手段を備えるとともに、該撮像手段により撮像された画像を表示する表示手段を備え、
前記磁界方向制御手段による医療装置の長手軸回りの回転情報に基づいて、前記撮像手段により撮像された画像を、逆方向に回転させて前記表示手段に表示させる画像制御手段を備える請求項17に記載の医療装置誘導システム。 - 前記医療装置がカプセル内視鏡であり、前記カプセル内視鏡の被検体への挿入方向と、前記磁気誘導コイルの中心軸線の方向とが略同一になっている請求項15から請求項18のいずれかに記載の医療装置誘導システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005113082A JP5030392B2 (ja) | 2004-06-14 | 2005-04-11 | 医療装置の位置検出システムおよび医療装置誘導システム |
| PCT/JP2005/011179 WO2005120345A2 (en) | 2004-06-14 | 2005-06-13 | Position detection system for a medical device and medical-device guidance system |
| EP05751276.6A EP1755449B1 (en) | 2004-06-14 | 2005-06-13 | Position detection system for a medical device and medical-device guidance system |
| US11/629,344 US20080139883A1 (en) | 2004-06-14 | 2005-06-13 | Position Detection System for a Medical Device and Medical-Device Guidance System |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004175519 | 2004-06-14 | ||
| JP2004175519 | 2004-06-14 | ||
| JP2005113082A JP5030392B2 (ja) | 2004-06-14 | 2005-04-11 | 医療装置の位置検出システムおよび医療装置誘導システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006026391A JP2006026391A (ja) | 2006-02-02 |
| JP2006026391A5 JP2006026391A5 (ja) | 2009-03-05 |
| JP5030392B2 true JP5030392B2 (ja) | 2012-09-19 |
Family
ID=34971522
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005113082A Expired - Fee Related JP5030392B2 (ja) | 2004-06-14 | 2005-04-11 | 医療装置の位置検出システムおよび医療装置誘導システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20080139883A1 (ja) |
| EP (1) | EP1755449B1 (ja) |
| JP (1) | JP5030392B2 (ja) |
| WO (1) | WO2005120345A2 (ja) |
Families Citing this family (49)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070244388A1 (en) * | 2004-12-17 | 2007-10-18 | Ryoji Sato | Position Detection System, Guidance System, Position Detection Method, Medical Device, and Medical Magnetic-Induction and Position-Detection System |
| JP4679200B2 (ja) * | 2005-03-28 | 2011-04-27 | オリンパス株式会社 | カプセル型医療装置の位置検出システム、カプセル型医療装置誘導システムおよびカプセル型医療装置の位置検出方法 |
| KR100990287B1 (ko) * | 2005-10-06 | 2010-10-26 | 올림푸스 가부시키가이샤 | 위치 검출 시스템 |
| CN101351143B (zh) * | 2005-12-27 | 2012-07-04 | 奥林巴斯株式会社 | 胶囊型医疗装置引导系统 |
| JP4757021B2 (ja) * | 2005-12-28 | 2011-08-24 | オリンパス株式会社 | 位置検出システム |
| DE102006014045B4 (de) * | 2006-03-27 | 2012-04-05 | Siemens Ag | Verfahren und Einrichtung zur drahtlosen Fernsteuerung der Kapselfunktionen einer Ortungsspulen aufweisenden Arbeitskapsel |
| DE102006014040B4 (de) * | 2006-03-27 | 2012-04-05 | Siemens Ag | Verfahren und Einrichtung zur drahtlosen Fernsteuerung der Kapselfunktionen einer Arbeitskapsel eines Magnetspulensystems |
| CN101426423B (zh) | 2006-04-21 | 2011-05-11 | 奥林巴斯医疗株式会社 | 医疗装置引导系统 |
| DE102006019989A1 (de) * | 2006-04-26 | 2007-10-31 | Siemens Ag | Endoskopiekapsel |
| DE102006019987A1 (de) * | 2006-04-26 | 2007-10-31 | Siemens Ag | Endoskopiekapsel |
| EP2298151B1 (en) | 2006-06-29 | 2012-06-06 | Olympus Medical Systems Corporation | Capsule medical device and capsule medical device system |
| US20080125630A1 (en) * | 2006-09-11 | 2008-05-29 | Caylor Edward J | System and method for determining a location of an orthopaedic medical device |
| US10016148B2 (en) * | 2006-09-27 | 2018-07-10 | General Electric Company | Method and apparatus for correction of multiple EM sensor positions |
| JP5121201B2 (ja) * | 2006-09-28 | 2013-01-16 | オリンパスメディカルシステムズ株式会社 | 検知体位置検出システム |
| US7769422B2 (en) * | 2006-09-29 | 2010-08-03 | Depuy Products, Inc. | Apparatus and method for monitoring the position of an orthopaedic prosthesis |
| CN100450729C (zh) * | 2006-10-17 | 2009-01-14 | 华南理工大学 | 外磁场控制微机器人运动及位姿系统及其控制方法与应用 |
| JP4869040B2 (ja) | 2006-11-27 | 2012-02-01 | オリンパス株式会社 | 位置検出システムおよび医療装置誘導システム |
| JP5096034B2 (ja) * | 2007-04-27 | 2012-12-12 | オリンパスメディカルシステムズ株式会社 | 位置検出装置および医療装置誘導システム |
| DE102007023059A1 (de) | 2007-05-16 | 2008-12-04 | Siemens Ag | Miniaturisiertes Gerät |
| JP5269348B2 (ja) * | 2007-05-21 | 2013-08-21 | オリンパス株式会社 | 位置検出システム及び位置検出システムの作動方法 |
| JP5243750B2 (ja) * | 2007-08-09 | 2013-07-24 | オリンパスメディカルシステムズ株式会社 | 医療装置誘導システム、作動方法および医療装置誘導システムで用いるルックアップテーブルの作成方法 |
| DE102007037846A1 (de) | 2007-08-10 | 2009-02-19 | Siemens Ag | Vorrichtung und Verfahren zum Bestimmen einer Position einer medizinischen Einrichtung im Körper eines Lebewesens |
| DE102007041346A1 (de) | 2007-08-31 | 2009-03-05 | Siemens Ag | Positionsmess- und Führungseinrichtung |
| CN101795615B (zh) * | 2007-09-07 | 2012-05-09 | 奥林巴斯医疗株式会社 | 位置检测装置、医疗装置引导系统、位置检测方法 |
| DE102007051861B4 (de) * | 2007-10-30 | 2020-03-12 | Olympus Corporation | Verfahren zur Führung eines Kapsel-Endoskops und Endoskopsystem |
| DE102007051862A1 (de) | 2007-10-30 | 2009-05-14 | Siemens Ag | Endoskopkapsel, Kapselendoskop, Betriebsverfahren und Kapselendoskopsystem |
| DE102007051860A1 (de) | 2007-10-30 | 2009-07-09 | Siemens Ag | MCGE-Gerät und Betriebsverfahren |
| DE102008003005A1 (de) | 2008-01-02 | 2009-07-16 | Siemens Ag | Positionskontrolle medizinischer Geräte im menschlichen Körper mittels Phasendifferenzmessung |
| JP4990194B2 (ja) * | 2008-03-07 | 2012-08-01 | 株式会社神戸製鋼所 | 磁石位置測定方法 |
| US8968210B2 (en) | 2008-10-01 | 2015-03-03 | Covidien LLP | Device for needle biopsy with integrated needle protection |
| US11298113B2 (en) | 2008-10-01 | 2022-04-12 | Covidien Lp | Device for needle biopsy with integrated needle protection |
| US9782565B2 (en) | 2008-10-01 | 2017-10-10 | Covidien Lp | Endoscopic ultrasound-guided biliary access system |
| US9186128B2 (en) | 2008-10-01 | 2015-11-17 | Covidien Lp | Needle biopsy device |
| DE102009009616A1 (de) | 2009-02-19 | 2010-08-26 | Siemens Aktiengesellschaft | Endoskopiekapsel mit Vorrichtung zur Unterstützung der Beförderung bei bewegungshemmender Randreibung |
| EP2407081A4 (en) * | 2009-03-10 | 2013-03-13 | Olympus Medical Systems Corp | POSITION DETECTING SYSTEM AND POSITION DETECTING METHOD |
| JP4791599B2 (ja) * | 2009-03-16 | 2011-10-12 | オリンパスメディカルシステムズ株式会社 | 位置検出システムおよび位置検出方法 |
| CN101836862B (zh) * | 2009-03-16 | 2014-03-26 | 上海微创医疗器械(集团)有限公司 | 人体腔室内壁三维标测方法及其设备和系统 |
| US20110218448A1 (en) * | 2010-03-03 | 2011-09-08 | Buntic Rudolf F | Perfusion detection devices and methods of using the same |
| DE102010037195A1 (de) * | 2010-08-27 | 2012-03-01 | Benedikt Hieronimi | System zur Erfassung von Hochfrequenz-Transceivern und dessen Verwendungen |
| CN102743175A (zh) * | 2012-06-30 | 2012-10-24 | 安翰光电技术(武汉)有限公司 | 基于不少于四磁场传感器阵列平面远程定位方法及系统 |
| WO2014014062A1 (ja) | 2012-07-20 | 2014-01-23 | 国立大学法人 九州工業大学 | 移動可能なカプセル装置及びその制御方法 |
| US10736492B2 (en) | 2013-06-27 | 2020-08-11 | Given Imaging Ltd. | Method and system for moving an in-vivo device in the gastrointestinal tract |
| JP5792403B2 (ja) * | 2013-06-27 | 2015-10-14 | オリンパス株式会社 | カプセル型医療システム |
| US9828871B2 (en) * | 2014-11-18 | 2017-11-28 | Hamilton Sundstrand Corporation | Magnetic control of guide vanes |
| KR102024427B1 (ko) * | 2017-06-05 | 2019-09-23 | 경희대학교 산학협력단 | Mems 센서 기반 자가 호흡 훈련 시스템 |
| US11129518B2 (en) * | 2018-05-05 | 2021-09-28 | Ankon Medical Technologies (Shanghai) Co., Ltd. | Portable system and method for position and orientation of remote objects |
| CN110151323A (zh) * | 2019-06-05 | 2019-08-23 | 北京理工大学 | 一种胶囊内镜操作平台的隔离装置 |
| CN117770737A (zh) * | 2019-11-27 | 2024-03-29 | 深圳硅基智控科技有限公司 | 胶囊内窥镜的磁定位方法以及磁定位系统 |
| CN113229770A (zh) * | 2021-03-25 | 2021-08-10 | 北京善行医疗科技有限公司 | 医疗装置引导和控制系统及方法 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4225968A1 (de) * | 1992-08-06 | 1994-02-10 | Micro Epsilon Messtechnik | Berührungslos arbeitendes Wegmeßsystem und Verfahren zur berührungslosen Wegmessung |
| CA2142338C (en) * | 1992-08-14 | 1999-11-30 | John Stuart Bladen | Position location system |
| JPH0764698A (ja) * | 1993-08-25 | 1995-03-10 | Seiko Instr Inc | 位置入力装置 |
| US5729129A (en) * | 1995-06-07 | 1998-03-17 | Biosense, Inc. | Magnetic location system with feedback adjustment of magnetic field generator |
| US5592939A (en) * | 1995-06-14 | 1997-01-14 | Martinelli; Michael A. | Method and system for navigating a catheter probe |
| JPH09122098A (ja) * | 1995-10-31 | 1997-05-13 | Toshiba Corp | 内視鏡プローブ先端部の動き情報検出装置 |
| IL125758A (en) * | 1996-02-15 | 2003-07-06 | Biosense Inc | Medical probes with field transducers |
| AU709081B2 (en) * | 1996-02-15 | 1999-08-19 | Biosense, Inc. | Medical procedures and apparatus using intrabody probes |
| SE516843C2 (sv) * | 2000-07-12 | 2002-03-12 | Bo Galle | Metod för mätning av gasformiga emissioner och/eller flux |
| IL143260A (en) * | 2001-05-20 | 2006-09-05 | Given Imaging Ltd | Array and method for locating an intra-body signal source |
| US20020193685A1 (en) * | 2001-06-08 | 2002-12-19 | Calypso Medical, Inc. | Guided Radiation Therapy System |
| US6625563B2 (en) * | 2001-06-26 | 2003-09-23 | Northern Digital Inc. | Gain factor and position determination system |
| CN100354889C (zh) * | 2001-09-05 | 2007-12-12 | 吉温成象有限公司 | 用于体腔的三维显示的系统和方法 |
| JP3917885B2 (ja) * | 2002-04-08 | 2007-05-23 | オリンパス株式会社 | カプセル内視鏡システム |
| US20040143182A1 (en) * | 2002-08-08 | 2004-07-22 | Pavel Kucera | System and method for monitoring and stimulating gastro-intestinal motility |
| JP4746876B2 (ja) * | 2002-10-15 | 2011-08-10 | ギブン イメージング リミテッド | 移動装置に信号を転送するための装置、システムおよび方法 |
| US7289839B2 (en) * | 2002-12-30 | 2007-10-30 | Calypso Medical Technologies, Inc. | Implantable marker with a leadless signal transmitter compatible for use in magnetic resonance devices |
-
2005
- 2005-04-11 JP JP2005113082A patent/JP5030392B2/ja not_active Expired - Fee Related
- 2005-06-13 US US11/629,344 patent/US20080139883A1/en not_active Abandoned
- 2005-06-13 WO PCT/JP2005/011179 patent/WO2005120345A2/en active Application Filing
- 2005-06-13 EP EP05751276.6A patent/EP1755449B1/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| EP1755449B1 (en) | 2015-04-15 |
| WO2005120345A3 (en) | 2006-03-09 |
| US20080139883A1 (en) | 2008-06-12 |
| WO2005120345A2 (en) | 2005-12-22 |
| EP1755449A2 (en) | 2007-02-28 |
| JP2006026391A (ja) | 2006-02-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5030392B2 (ja) | 医療装置の位置検出システムおよび医療装置誘導システム | |
| JP4694571B2 (ja) | 位置検出システム | |
| EP1955644B1 (en) | Medical device position detecting system, medical device guiding system, and position detecting method for medical device | |
| KR100972253B1 (ko) | 자기 유도를 이용한 의료용 위치 검출 시스템 | |
| JP4679200B2 (ja) | カプセル型医療装置の位置検出システム、カプセル型医療装置誘導システムおよびカプセル型医療装置の位置検出方法 | |
| JP4868808B2 (ja) | 医療装置および医療装置システム | |
| JP4198045B2 (ja) | 被検体内位置検出システム | |
| CN100469310C (zh) | 用于医疗器件的位置检测系统和医疗器件引导系统 | |
| JP4709594B2 (ja) | 磁気誘導医療システム | |
| JP4422476B2 (ja) | 被検体内位置検出システム | |
| JP2007054246A (ja) | 位置検出装置および医療装置位置検出システム | |
| JPH0928662A (ja) | 内視鏡形状検出装置 | |
| JP2005192632A (ja) | 被検体内移動状態検出システム | |
| Islam et al. | A novel and compatible sensing coil for a capsule in wireless capsule endoscopy for real time localization | |
| JP4547181B2 (ja) | 被検体内位置検出システム | |
| JP5415717B2 (ja) | 検査装置およびこれを用いた磁気誘導システム | |
| JP4523322B2 (ja) | 位置検出装置、被検体内位置検出システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080411 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110412 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110609 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120327 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120525 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120612 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120626 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150706 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |