JP5027751B2 - 作業機用モジュール - Google Patents
作業機用モジュール Download PDFInfo
- Publication number
- JP5027751B2 JP5027751B2 JP2008192670A JP2008192670A JP5027751B2 JP 5027751 B2 JP5027751 B2 JP 5027751B2 JP 2008192670 A JP2008192670 A JP 2008192670A JP 2008192670 A JP2008192670 A JP 2008192670A JP 5027751 B2 JP5027751 B2 JP 5027751B2
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- sensor circuit
- pattern area
- communication circuit
- ground pattern
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Landscapes
- Structure Of Printed Boards (AREA)
Description
特許文献1に記載されたものでは、基板2又は12の一面に電源パターン1が形成され、他面にグランド面(グランドパターン)3又は13が形成されている。グランド面3又は13は、基板2又は12の他面の全体にわたっている。(各符号1,2,3,12,13は、公報に記載されたものである。)
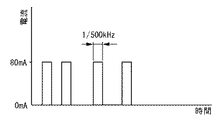
つまり、CAN通信では、通信速度が高速であり、かつ電流がオンしたときとオフしたときの電流値差が大きく、このように高速でかつ変化の激しい電流のオン、オフは、グランドパターンに電位変化を発生させてセンサ回路における電源電圧の変動をもたらす。すると、たとえばセンサ回路に入力されるセンサ情報がアナログセンサによる情報である場合、センサ情報に変化があったと判断されて制御を実行されることがある。
前記基板におけるグランドパターンには、前記センサ回路に対応するセンサ回路用グランドパターン域と、前記CAN通信回路に対応するCAN通信回路用グランドパターン域と、前記センサ回路用グランドパターン域と前記CAN通信回路用グランドパターン域とを分離させる無パターン域とを前記基板における同一の面上に備えてあり、
前記センサ回路用グランドパターン域と前記CAN通信回路用グランドパターン域とが、前記基板における電源の単一のマイナス端子部に接続してあり、
前記無パターン域は、前記基板の平面視において、前記基板の外側から前記センサ回路用グランドパターン域と前記CAN通信回路用グランドパターン域との間を通り、前記マイナス端子部の付近に至る部位まで延びるように備えてある。
前記センサ回路のための前記基板における電源と、前記CAN通信回路のための前記基板における電源とを別々に設けてある。
本第1発明の更なる特徴構成は、前記無パターン域は、前記基板の平面視において、前記CAN通信回路のための前記基板における電源の配置部位、及び、その電源の配置部位と前記CAN通信回路においてその電源から電力供給を受ける電子部品の配置部位との間の領域を、前記センサ回路から分離させるように備えてある。
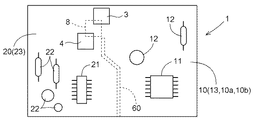
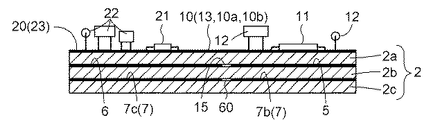
図1は、本発明の実施例に係る作業機用モジュール1の平面図である。図2は、本発明の実施例に係る作業機用モジュール1の断面図である。これらの図に示すように、本発明の実施例に係る作業機用モジュール1は、基板2と、この基板2の表面側に設けた制御マイクロプロセッサ11を有したセンサ回路10と、前記基板2の表面側に設けたCANドライバIC21を有したCAN(Controller Area Network)通信回路20と、前記基板2の表面側に設けた一対の電源3,4とを備えている。
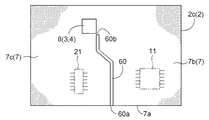
つまり、CAN.GNDパターン域7cにCAN通信に起因して電位変化が発生し、この電位変化がセンサGNDパターン域7bに影響すると、この影響がセンサ回路10での操作位置検出センサ51や揺動角検出センサ52による検出情報の電圧値への変換に及び、連結された作業装置が突然上下にずれ動くなどの事態が発生する。無パターン域60は、CAN.GNDパターン域7cにおける電位変化のセンサGNDパターン域7bへの影響を抑制することにより、作業装置のずれ動きを発生させないとか、発生したとしてもぴくっと動く程度のものに留め、仕上がり精度の高い作業や作業者にとって快適な作業を実現する。
これにより、センサGNDパターン域7bとCAN.GNDパターン域7cとは、無パターン域60によって分離されているにもかかわらず、センサGNDパターン域7bおよびCAN.GNDパターン域7cの前記マイナス端子部8との接続面積を大に確保した状態で前記マイナス端子部8に接続している。
上記した実施例に替え、燃料噴射量の変更によるエンジンの回転数制御を行なうCAN通信回路など、各種のCAN通信回路の構成を採用して実施してもよい。また、走行用の静油圧式無段変速装置を操作するアクチュエータと、変速レバーの操作位置を検出するセンサとを連係させて変速レバーによる静油圧式無段変速装置の変速操作を可能にするセンサ回路など、各種のサンサ回路の構成を採用して実施してもよい。これらの場合でも本発明の目的を達成することができる。
3,4,8 電源
7 グラントパターン
7b センサ回路用グランドパターン域
7c CAN通信回路用グランドパターン域
10 センサ回路
20 CAN通信回路
60 無パターン域
Claims (3)
- センサ回路とCAN通信回路とを同一の基板に設けた作業機用モジュールであって、
前記基板におけるグランドパターンには、前記センサ回路に対応するセンサ回路用グランドパターン域と、前記CAN通信回路に対応するCAN通信回路用グランドパターン域と、前記センサ回路用グランドパターン域と前記CAN通信回路用グランドパターン域とを分離させる無パターン域とを前記基板における同一の面上に備えてあり、
前記センサ回路用グランドパターン域と前記CAN通信回路用グランドパターン域とが、前記基板における電源の単一のマイナス端子部に接続してあり、
前記無パターン域は、前記基板の平面視において、前記基板の外側から前記センサ回路用グランドパターン域と前記CAN通信回路用グランドパターン域との間を通り、前記マイナス端子部の付近に至る部位まで延びるように備えてある作業機用モジュール。 - 前記センサ回路は、アナログセンサ回路部を備えてあり、
前記センサ回路のための前記基板における電源と、前記CAN通信回路のための前記基板における電源とを別々に設けてある請求項1に記載の作業機用モジュール。 - 前記無パターン域は、前記基板の平面視において、前記CAN通信回路のための前記基板における電源の配置部位、及び、その電源の配置部位と前記CAN通信回路においてその電源から電力供給を受ける電子部品の配置部位との間の領域を、前記センサ回路から分離させるように備えてある請求項2に記載の作業機用モジュール。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008192670A JP5027751B2 (ja) | 2008-07-25 | 2008-07-25 | 作業機用モジュール |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008192670A JP5027751B2 (ja) | 2008-07-25 | 2008-07-25 | 作業機用モジュール |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010034159A JP2010034159A (ja) | 2010-02-12 |
| JP5027751B2 true JP5027751B2 (ja) | 2012-09-19 |
Family
ID=41738320
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008192670A Active JP5027751B2 (ja) | 2008-07-25 | 2008-07-25 | 作業機用モジュール |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5027751B2 (ja) |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08321685A (ja) * | 1995-05-26 | 1996-12-03 | Hitachi Commun Syst Inc | 多層プリント板 |
| JP5032803B2 (ja) * | 2006-07-10 | 2012-09-26 | 新光電気工業株式会社 | 電子部品 |
| JP4787710B2 (ja) * | 2006-09-28 | 2011-10-05 | 株式会社クボタ | コンバインのエンジン制御装置 |
-
2008
- 2008-07-25 JP JP2008192670A patent/JP5027751B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010034159A (ja) | 2010-02-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10427705B2 (en) | Steering wheel with fixed eccentric center hub | |
| US20200167114A1 (en) | Driving assistance apparatus and vehicle | |
| WO2013176165A1 (ja) | 車両用インナーミラーシステム及びこの車両用インナーミラーシステムを備えた車両 | |
| CN110884559B (zh) | 转向控制器和转向控制的方法 | |
| US20200081608A1 (en) | Display control device | |
| JP2019028920A (ja) | 表示制御装置 | |
| JP2015191608A (ja) | 作業情報管理システム | |
| CN110881123B (zh) | 照相机校准装置 | |
| JP5027751B2 (ja) | 作業機用モジュール | |
| US11491874B2 (en) | Vehicle body structure | |
| US20190344667A1 (en) | Outboard motor | |
| JP5736144B2 (ja) | トラクタにおける運転操作装置 | |
| JP2015160450A (ja) | サイドミラー装置 | |
| JP4521317B2 (ja) | トラクタの負荷制御装置 | |
| JP2015042140A (ja) | 作業車両 | |
| US20080258896A1 (en) | System for improving back end visibility and machine using same | |
| JP2020079057A (ja) | 作業車両 | |
| JP2010268755A (ja) | 作業車輌の傾斜制御装置 | |
| JP5138392B2 (ja) | 農作業機 | |
| JP2019083422A (ja) | 車両周辺視認装置 | |
| JP2018188047A (ja) | 車載表示装置及び車載表示システム | |
| CN106809273A (zh) | 电动助力转向系统、控制方法及车辆 | |
| JP2010137602A (ja) | スイッチ装置 | |
| US20190233007A1 (en) | Method for operating steering systems of machines | |
| JP2014192732A (ja) | 車両用後方確認システム、撮像条件設定装置、電動パワーステアリング装置およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100927 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120224 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120308 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120501 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120524 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120622 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150629 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5027751 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |