JP5022149B2 - 電動パワーステアリング装置 - Google Patents
電動パワーステアリング装置 Download PDFInfo
- Publication number
- JP5022149B2 JP5022149B2 JP2007227487A JP2007227487A JP5022149B2 JP 5022149 B2 JP5022149 B2 JP 5022149B2 JP 2007227487 A JP2007227487 A JP 2007227487A JP 2007227487 A JP2007227487 A JP 2007227487A JP 5022149 B2 JP5022149 B2 JP 5022149B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- reaction force
- correction
- control unit
- vehicle behavior
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Description
Ic=Iy+(Id+If)−Ir−Is
となる。
It=Ia−Ic=Ia−(Iy+Id+If)+(Ir+Is)
となる。
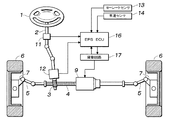
6 車輪
9 電動機
11 操舵角センサ
12 操舵トルクセンサ
13 ヨーレートセンサ
16 ステアリング制御装置
21 ベース制御部
22 アクティブ反力制御部
24 減算器
26 リレー
27 失陥検知部
41 ヨーレートフィードバック反力補正部(車両挙動反力補正部)
42 操舵速度反力補正部
43 操舵トルク反力補正部
44 ダンパ反力補正部
45 フリクション反力補正部
46 ラックロード反力補正部
47 アシスト反力補正部
51 加算器
52〜54 減算器
Claims (4)
- 補助操舵力を発生する電動機の基本制御量を操舵状態に応じて求めるベース制御部と、
このベース制御部とはリレーを介して接続され、補助操舵力に対する反力成分となる補正量を車両挙動に応じて求める車両挙動反力補正部と、
前記ベース制御部とはリレーを介して接続され、前記車両挙動反力補正部の補正量に付加される操舵トルクに応じた補正量を求める操舵トルク反力補正部とを有し、
前記車両挙動反力補正部の動作を中止する際に、前記リレーをオフとして、前記車両挙動反力補正部の補正量と共に前記操舵トルク反力補正部の補正量に基づく補正が行われないようにしたことを特徴とする電動パワーステアリング装置。 - 前記ベース制御部とはリレーを介して接続され、前記車両挙動反力補正部の補正量に付加される操舵速度に応じた補正量を求める操舵速度反力補正部をさらに有することを特徴とする請求項1に記載の電動パワーステアリング装置。
- 前記ベース制御部を有する第1の制御ユニットと、
前記車両挙動反力補正部を有する第2の制御ユニットとを備え、
前記第1の制御ユニットと前記第2の制御ユニットとは、互いに別体で構成されて通信媒体を介して通信可能としたことを特徴とする請求項1または請求項2に記載の電動パワーステアリング装置。 - 前記第1の制御ユニットは、前記リレーを有することを特徴とする請求項3に記載の電動パワーステアリング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007227487A JP5022149B2 (ja) | 2007-09-03 | 2007-09-03 | 電動パワーステアリング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007227487A JP5022149B2 (ja) | 2007-09-03 | 2007-09-03 | 電動パワーステアリング装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009056994A JP2009056994A (ja) | 2009-03-19 |
| JP5022149B2 true JP5022149B2 (ja) | 2012-09-12 |
Family
ID=40553126
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007227487A Expired - Fee Related JP5022149B2 (ja) | 2007-09-03 | 2007-09-03 | 電動パワーステアリング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5022149B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5591837B2 (ja) | 2012-01-25 | 2014-09-17 | 本田技研工業株式会社 | 車両及び操舵装置 |
| JP5900309B2 (ja) * | 2012-12-15 | 2016-04-06 | マツダ株式会社 | 車線維持支援装置 |
| KR102087144B1 (ko) * | 2013-11-26 | 2020-03-10 | 현대모비스 주식회사 | 전동식 조향장치의 구동 장치 및 방법 |
| KR102207573B1 (ko) * | 2014-11-28 | 2021-01-27 | 현대모비스 주식회사 | Mdps 시스템의 외란보상장치 |
| JP6844393B2 (ja) * | 2017-04-13 | 2021-03-17 | トヨタ自動車株式会社 | 運転支援制御システム |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3110891B2 (ja) * | 1992-09-16 | 2000-11-20 | 本田技研工業株式会社 | 車両用操舵装置 |
| JP3103052B2 (ja) * | 1997-11-18 | 2000-10-23 | 本田技研工業株式会社 | 車両用操舵装置 |
| JPH11208492A (ja) * | 1998-01-20 | 1999-08-03 | Honda Motor Co Ltd | 電動パワーステアリング装置の制御方法 |
| JP4226169B2 (ja) * | 1999-11-09 | 2009-02-18 | 本田技研工業株式会社 | 車両用操舵装置 |
-
2007
- 2007-09-03 JP JP2007227487A patent/JP5022149B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009056994A (ja) | 2009-03-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5320292B2 (ja) | 電動パワーステアリング装置 | |
| JP5971426B2 (ja) | 電動パワーステアリング装置 | |
| US7983816B2 (en) | Control apparatus for electric power steering apparatus | |
| JP5327331B2 (ja) | 車両の電動パワーステアリング装置 | |
| EP1803627B1 (en) | Electric power steering apparatus | |
| JP4293021B2 (ja) | 車両用操舵装置 | |
| CN107867286B (zh) | 车辆的控制装置及车辆的控制方法 | |
| JP5943018B2 (ja) | 操舵制御装置 | |
| JP4728406B2 (ja) | 電動パワーステアリング装置 | |
| JP5313729B2 (ja) | 電動パワーステアリング装置 | |
| JP5061768B2 (ja) | 車両用操舵装置 | |
| WO2018055805A1 (ja) | パワーステアリング装置の制御装置 | |
| US9701338B2 (en) | Electric power steering apparatus | |
| JP2007125944A (ja) | 電動パワーステアリング装置の制御装置 | |
| US9796411B2 (en) | Electric power steering apparatus | |
| JP5022149B2 (ja) | 電動パワーステアリング装置 | |
| JP4997478B2 (ja) | 車両用操舵装置 | |
| JP4517810B2 (ja) | 車両用操舵制御装置 | |
| JP4956782B2 (ja) | 車両用操舵制御装置 | |
| JP2005082119A (ja) | 電動パワーステアリング装置 | |
| JP5144093B2 (ja) | 電動パワーステアリング装置 | |
| JP2007269062A (ja) | 車両用操舵装置 | |
| JP4814905B2 (ja) | 車両用操舵制御装置 | |
| JP2006069497A (ja) | ステアリング装置 | |
| JP2006168481A (ja) | 車両用操舵制御装置およびその転舵角制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091127 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20110911 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111206 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120203 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120306 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120501 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120522 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120615 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5022149 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150622 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |