JP4991069B2 - プラズマ処理システムで用いられる直線駆動システム - Google Patents
プラズマ処理システムで用いられる直線駆動システム Download PDFInfo
- Publication number
- JP4991069B2 JP4991069B2 JP2001550778A JP2001550778A JP4991069B2 JP 4991069 B2 JP4991069 B2 JP 4991069B2 JP 2001550778 A JP2001550778 A JP 2001550778A JP 2001550778 A JP2001550778 A JP 2001550778A JP 4991069 B2 JP4991069 B2 JP 4991069B2
- Authority
- JP
- Japan
- Prior art keywords
- gear
- gears
- processing system
- drive assembly
- plasma processing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000012545 processing Methods 0.000 title claims description 196
- 239000000758 substrate Substances 0.000 claims description 103
- 238000000034 method Methods 0.000 claims description 37
- 230000008569 process Effects 0.000 claims description 28
- 238000012546 transfer Methods 0.000 claims description 11
- 238000005530 etching Methods 0.000 claims description 10
- 239000000463 material Substances 0.000 claims description 7
- 230000005684 electric field Effects 0.000 claims description 4
- 238000003672 processing method Methods 0.000 claims 1
- 238000007740 vapor deposition Methods 0.000 claims 1
- 230000001965 increasing effect Effects 0.000 description 9
- 230000008901 benefit Effects 0.000 description 7
- 230000007423 decrease Effects 0.000 description 7
- 230000008878 coupling Effects 0.000 description 5
- 238000010168 coupling process Methods 0.000 description 5
- 238000005859 coupling reaction Methods 0.000 description 5
- 238000000151 deposition Methods 0.000 description 5
- 230000008021 deposition Effects 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 238000001020 plasma etching Methods 0.000 description 4
- 230000035945 sensitivity Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 239000011521 glass Substances 0.000 description 3
- 150000002500 ions Chemical class 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 230000007935 neutral effect Effects 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000005229 chemical vapour deposition Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 238000005240 physical vapour deposition Methods 0.000 description 2
- 238000000623 plasma-assisted chemical vapour deposition Methods 0.000 description 2
- 238000006467 substitution reaction Methods 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 229910052581 Si3N4 Inorganic materials 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 239000006227 byproduct Substances 0.000 description 1
- 238000005266 casting Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 238000005137 deposition process Methods 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 238000001312 dry etching Methods 0.000 description 1
- 238000001125 extrusion Methods 0.000 description 1
- 238000005242 forging Methods 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 238000009616 inductively coupled plasma Methods 0.000 description 1
- 238000001746 injection moulding Methods 0.000 description 1
- 239000000314 lubricant Substances 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 239000003921 oil Substances 0.000 description 1
- 238000005086 pumping Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 235000012239 silicon dioxide Nutrition 0.000 description 1
- 239000000377 silicon dioxide Substances 0.000 description 1
- HQVNEWCFYHHQES-UHFFFAOYSA-N silicon nitride Chemical compound N12[Si]34N5[Si]62N3[Si]51N64 HQVNEWCFYHHQES-UHFFFAOYSA-N 0.000 description 1
- 238000004544 sputter deposition Methods 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- -1 that is Substances 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
Images



Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32623—Mechanical discharge control means
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32532—Electrodes
- H01J37/32568—Relative arrangement or disposition of electrodes; moving means
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Plasma & Fusion (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Plasma Technology (AREA)
- Drying Of Semiconductors (AREA)
- Chemical Vapour Deposition (AREA)
Description
【発明の背景】
本発明は、ICの製造に使用される半導体基板またはフラットパネルディスプレイに使用されるパネル(例えば、ガラスやプラスチックなど)などの基板を処理するための装置および方法に関する。より詳しくは、本発明は、基板の処理に関連する部品を移動させるための改良された方法および装置に関する。
【0002】
プラズマ処理システムが出回るようになってしばらくに経つ。誘導結合プラズマソース、電子サイクロトロン共鳴(ECR)ソース、容量性ソースなどを利用するプラズマ処理システムは、半導体基板および表示パネルを処理するために、長年に渡って様々な度合いで導入され採用されている。代表的なプラズマ処理の適用例では、まず、処理チャンバ内に処理用のソースガス(エッチャントガスまたはデポジションソースガス)を導入する。次に、エネルギを供給し、処理用のソースガスからプラズマを発生させる。発生したプラズマは、追加のエネルギによって維持される。追加のエネルギは、例えば、静電結合や、誘導結合、マイクロ波を介した結合などの種々の周知の方法でプラズマに結合される。そして、プラズマは、例えば、基板上の薄膜の選択的なエッチングまたは堆積などの処理に利用される。
【0003】
デポジションでは、基板の表面(ガラスパネルまたはウエハなどの表面)上に材料を堆積させる。例えば、基板の表面上には、ケイ素、二酸化ケイ素、窒化ケイ素、金属などの堆積層が形成される。これに対して、エッチングは、基板の表面上の既定の領域から材料を選択的に除去するために採用される。例えば、基板の層に、バイアや、コンタクト、トレンチなどのエッチング形状が形成される。
【0004】
基板を処理する際に、エンジニアが改善に務める最も重要なパラメータの1つは、処理の均一性である。ここで、処理の均一性は、基板表面全体の均一性や、同じ処理チャンバ内で処理される異なる基板間の均一性、異なる処理チャンバ内で処理される異なる基板間の均一性を意味する。処理の均一性が高い場合には、例えば、基板上の異なる点での処理速度と共に、同じ生産工程を経る異なる基板間の処理速度も、ほぼ等しいことが期待される。いずれの場合であっても、同じ基板上で過度に処理される領域と処理が不十分な領域とが生じたり、基板毎に処理が異なったりする可能性は低い。処理の均一性は歩留まりの重要な決定要因であるため、処理の均一性が高レベルであれば、メーカで必要となるコストは低下する傾向にある。
【0005】
多くの適用例において、処理の均一性を維持することは困難である。これは、基板の処理に関連する種々のパラメータが変動するためである。例えば、ウエハ領域圧力(WAP:wafer area pressure)、すなわち、基板表面の周辺の圧力は、基板の近くで生じる温度変化が原因で、基板の処理中に変動し得る。当業者に周知なように、異なる基板間でWAPが高かったり低かったりする場合には、基板毎の処理パフォーマンスが非均一になる傾向がある。また、同じ基板であっても、異なる領域間でWAPが高かったり低かったりする場合には、基板表面の全体における処理パフォーマンスが非均一になる傾向がある。
【0006】
WAPを制御する技術の1つは、処理チャンバ内に閉じ込めリングを設けることである。閉じ込めリングは、一般に、処理対象の基板の上方に位置する活性領域において、基板を囲むように構成される。こうすれば、処理の範囲が限定されるため、WAPの均一性が高まる。この技術は、多くの適用例では上手く作用するが、他の多くの適用例では、1枚の基板を処理する場合や、1つの生産工程で複数の基板を処理する場合、異なるチャンバで処理する場合に生じるWAPの変動に適合させるために、順応的に変化可能な制御処理環境を提供することが望まれている。
【0007】
近年、排出コンダクタンスを調整可能な、それ故、WAPを調整可能な可動閉じ込めリングを提供する試みもなされた。この方法では、WAPが制御され、処理中に生じる変動が低減される。具体的なアプローチの1つでは、カムシステムを使用し、上部電極と下部電極との間で閉じ込めリングを上下に移動させる。このアプローチでは、表面に異なる高さを有する環状カムが、閉じ込めリングに接続されたプランジャ/バネ機構に垂直に係合する。カムが回転すると、カムの表面上の異なる高さに応じて、プランジャが上下に移動し、それに対応して閉じ込めリングも上下に移動する。カム機構は、閉じ込めリングと下部電極との間の間隙を制御することによって、排出ガスのコンダクタンスを調整でき、これによって基板の上方の活性領域のWAPを調整できるように、構成される。
【0008】
この技術は、概ね上手く作用するが、カムを使用する従来のアプローチでは、限られた範囲の圧力制御、低感度、低分解能(すなわち低精度)しか提供できないという問題がある。例えば、カムの表面に設けられる傾斜すなわち高さは、プランジャとカムとの境界によって制限される。これは、傾斜が大きすぎるとプランジャが引っ掛かるためである。結果として、プランジャが移動できる全体の距離は限られ、圧力制御の範囲も制限される。また、カムを使用する従来のアプローチでは、処理中に圧力を正確に変化させることができない。さらに、プランジャとカムとの境界が磨耗したり、バネが弾力性を失ったりして、システムの信頼度が低下する傾向がある。
【0009】
メーカの大きな関心事の1つは、処理ツールの所有コストである。所有コストには、例えば、システムを入手および維持するためのコストや、処理パフォーマンスを許容可能なレベルに維持するために必要なチャンバの洗浄頻度、システム部品の寿命などが含まれる。望ましい処理とは、所有コストとプロセスパラメータとの間でバランスを保ち、低コストで高品質の処理を達成できるような処理を、意味する場合が多い。さらに、基板上の特徴の小型化や、処理に対する要求の増大(例えば、微小寸法を小さくする、アスペクト比を高める、スループットを向上させるなど)に伴って、エンジニアは、低コストで高品質の処理を達成できる新しい方法および装置を常に模索している。
【0010】
以上から、基板の処理に関連する部品(すなわち閉じ込めリング)を移動させるための改良された方法および装置が必要とされていることが分かる。
【0011】
【発明の概要】
本発明の一実施形態は、基板を処理するためのプラズマ処理システムに関する。プラズマ処理システムは、基板の処理に関連する部品を備える。部品は、例えば、閉じ込めリングや電極である。プラズマ処理システムは、さらに、部品を直線方向に移動させるための歯車駆動アセンブリを備える。いくつかの実施形態では、歯車駆動アセンブリは、基板の上方の圧力を制御するために、閉じ込めリングを移動させるように構成されている。他の実施形態では、歯車駆動アセンブリは、複数の部品を移動させるように構成されている。好ましい一実施形態において、歯車駆動アセンブリは、第1の歯車と、第2の歯車と、位置決め部材と、を備える。第1の歯車は、第2の歯車を駆動するように構成されており、第2の歯車は、位置決め部材を直線方向に移動させるように構成されている。また、位置決め部材は、上記部品に取り付けられており、この結果、位置決め部材が直線方向に移動するときに、部品は移動する。
【0012】
本発明の別の実施形態は、基板を処理するためのプラズマ処理システムに関する。プラズマ処理システムは、処理チャンバ内に電場を発生させるための電極と、処理チャンバ内にプラズマを閉じ込めるための閉じ込めリングと、を備える。プラズマ処理システムは、さらに、閉じ込めリングまたは電極を移動させるための歯車駆動アセンブリを備える。歯車駆動アセンブリは、第1の歯車と、第2の歯車と、位置決め部材と、を少なくとも備える。第1の歯車は、第2の歯車を駆動するように構成されており、第2の歯車は、位置決め部材を所定の方向に移動させるように構成されている。位置決め部材は、閉じ込めリングまたは電極に取り付けられており、この結果、第1の位置決め部材が第2の歯車によって移動するときに、閉じ込めリングまたは電極は所定の方向に移動する。
【0013】
いくつかの実施形態では、閉じ込めリングの位置は、基板が処理のために処理チャンバ内に配置されたときに、閉じ込めリングと基板との間に、間隙を形成するように構成されている。この間隙は、排気ガスのコンダクタンスを制御するように構成されている。
【0014】
いくつかの実施形態では、第1の歯車と第2の歯車とは、処理チャンバによって回転可能に支持されている。また、第2の歯車は、第1の歯車に動作可能に係合している。さらに、第2の歯車は、軸と、軸に設けられた第1のねじ切り面と、を有する。また、位置決め部材は、直線方向の移動を提供するために、第2の歯車の第1のねじ切り面に移動可能に結合された第2のねじ切り面を有する。
【0015】
いくつかの実施形態では、歯車駆動アセンブリは、第1の歯車を回転させるための駆動装置を備える。駆動装置は、モータと、モータに回転可能に結合された駆動歯車と、を備える。駆動歯車は、第1の歯車に動作可能に係合している。モータが駆動歯車を回転させると、駆動歯車は第1の歯車を駆動して回転させ、第1の歯車は第2の歯車を駆動して回転させ、回転する第2の歯車は位置決め部材を直線方向に移動させる。
【0016】
他の実施形態では、歯車駆動アセンブリは、さらに、第3の歯車と、第2の位置決め部材と、を備える。第1の歯車は、第3の歯車を駆動するように構成されている。また、第3の歯車は、第2の位置決め部材を所定の方向に移動させるように構成されている。さらに、第2の位置決め部材は、閉じ込めリングまたは電極に取り付けられており、この結果、第2の位置決め部材が第3の歯車によって移動するときに、取り込めリングまたは電極は所定の方向に移動する。関連の実施形態では、歯車駆動アセンブリは、さらに、第2の歯車または第3の歯車を第1の歯車に対して係合させたり解放させたりするためのトランスファ歯車を備える。第2の歯車がトランスファ歯車に係合する場合には、第1の位置決め部材が所定の方向に移動し、第3の歯車がトランスファ歯車に係合する場合には、第2の位置決め部材が所定の方向に移動する。
【0017】
いくつかの実施形態では、第1の歯車と第2の歯車と第3の歯車とトランスファ歯車とは、処理チャンバによって回転可能に支持されている。トランスファ歯車は、第1の歯車に動作可能に係合している。第2の歯車は、軸と、軸に設けられた第1のねじ切り面と、を有する。第1の位置決め部材は、直線方向の移動を提供するために、第2の歯車の第1のねじ切り面に移動可能に結合された第2のねじ切り面を有する。第3の歯車は、軸と、軸に設けられた第1のねじ切り面と、を有し、第2の位置決め部材は、直線方向の移動を提供するために、第3の歯車の第1のねじ切り面に移動可能に結合された第2のねじ切り面を有する。
【0018】
本発明の別の実施形態は、基板の処理に関連する物体を移動させるための直線駆動アセンブリに関する。直線駆動アセンブリは、第1の歯車と、第1の歯車に動作可能に係合する第2の歯車と、を備える。また、直線駆動アセンブリは、第1の部分と第2の部分とを有する位置決め部材を備える。第1の部分は、第2の歯車に対して直線方向に移動可能に結合されており、第2の部分は、物体に取り付けられている。いくつかの実施形態では、位置決め部材は、一定のピッチを有する雄ねじ切り面を含み、第2の歯車は、雄ねじ切り面のピッチと同じピッチを有する雌ねじ切り面を含む。位置決め部材の雄ねじ切り面は、第2の歯車の雌ねじ切り面内に、回転可能に設けられている。他の実施形態では、位置決め部材は直線形の歯車(例えばラックピニオン装置)である。
【0019】
いくつかの実施形態では、直線駆動アセンブリは、第1の歯車を駆動するためのモータを備える。また、直線駆動アセンブリは、複数の第2の歯車と、複数の位置決め部材と、を備える。複数の第2の歯車と複数の位置決め部材とは、第1の歯車の周辺に対称的に間隔を空けた状態で設けられている。例えば、外歯車が用いられる場合には、第2の歯車は、対称的に間隔を空けた状態で第1の歯車の外周に設けられ、内歯車(例えばプラネタリ歯車)が用いられる場合には、第2の歯車は、対称的に間隔を空けた状態で第1の歯車の内周に設けられる。
【0020】
直線駆動アセンブリは、静電結合リアクタや、誘電結合リアクタ、ECRリアクタを含む種々のプラズマ処理システムにおいて使用可能である。関連の実施形態では、直線駆動アセンブリは、プラズマ処理システムの処理チャンバ内で閉じ込めリングを移動させるように構成可能である。また、直線駆動アセンブリは、プラズマ処理システムの処理チャンバ内または処理チャンバ外で電極を移動させるように構成可能である。
【0021】
【発明の実施の形態】
次に、添付図面に例示された幾つかの好ましい実施形態に関連して、本発明を詳細に説明する。以下の説明では、本発明が完全に理解されるように、多くの項目を特定している。しかしながら、当業者には明らかなように、本発明は、これらの項目の一部または全てを特定しなくても実施できる。また、本発明が不必要に不明瞭となるのを避けるため、周知の処理工程の詳細な説明は省略した。
【0022】
本発明は、基板の処理に関連する物体を、高度な移動制御を用いて移動させることができる直線駆動アセンブリを提供する。直線駆動アセンブリは、動作可能に互いに係合された複数の歯車を備える。直線駆動アセンブリは、また、所定の歯車セットに移動可能に結合され、かつ、可動物体に構造的に結合された複数の位置決め部材を備える。位置決め部材は、所定の歯車セットが回転するときに、物体を直線方向に移動させるように構成されている。具体的な一適用例では、位置決め部材は、所定の歯車セットの雌ねじと噛み合うように構成された雄ねじを有するシャフトである。所定の歯車セットが回転すると、この歯車の回転によって雌ねじが回転し、この結果、シャフトが直線方向に移動する。したがって、歯車およびねじの使用によって、物体の直線運動を高度に制御することができる。例えば、歯車/ねじ構成は、より高い分解能・感度・信頼度で、より正確な移動を可能にする。
【0023】
本発明の一実施形態は、処理の均一性を高度に制御することができるプラズマ処理システムに関する。プラズマ処理システムは、基板を処理するように構成されている。プラズマ処理システムは、処理用のプラズマの生成および維持の双方に利用される処理チャンバと、下部電極と、上部電極と、閉じ込めリングと、を備える。
【0024】
本発明の一態様に従えば、直線駆動アセンブリの直線運動は、処理中に、閉じ込めリングと下部電極との間の間隙を制御するように構成されている。具体的には、直線駆動アセンブリは、上部電極と下部電極との間で、閉じ込めリングを上下に移動させて、排出ガスのコンダクタンスを調整できるように設けられている。排出ガスのコンダクタンスを調整することによって、基板の上方の活性領域の圧力(すなわちWAP)が、処理に適した所望のレベルに維持される。したがって、処理中に、わずかな変化量で圧力が制御され、この結果、処理の均一性を高め、これによって基板のスループットを高め、デバイス故障を低減させ、処理対象の基板の全体的な生産性を向上させることができる。
【0025】
本発明の別の一態様に従えば、直線駆動アセンブリの直線運動は、処理中に、上部電極と基板との間の間隙を制御するように構成されている。具体的には、直線駆動アセンブリは、上部電極を上下に移動させて、基板の上方における活性領域の容積を調整するように設けられている。容積を調整することによって、プラズマ密度および圧力などのプラズマ処理に関連する種々のパレメータが、処理に適した所望のレベルに維持される。同様に、プラズマ密度および圧力は、処理中にわずかな変化量で制御され、この結果、処理の均一性を高め、これによって基板のスループットを高め、デバイス故障を低減させ、処理対象の基板の全体的な生産性を向上させることができる。
【0026】
本発明の別の一態様に従えば、直線駆動アセンブリの直線運動は、処理中に、閉じ込めリングと下部電極との間の間隙と、上部電極と基板との間の間隙とを、独立して制御するように構成されている。具体的な実施形態では、直線駆動アセンブリは、追加の歯車を備えるように再構成される。例えば、直線駆動アセンブリは、所定の歯車および位置決め部材からなる第2のセットを備える。所定の歯車および位置決め部材からなる第1のセットは、閉じ込めリングを移動させるように構成され、所定の歯車および位置決め部材からなる第2のセットは、上部電極を移動させるように構成される。また、所定の歯車を、第1の歯車に動作可能に係合させたり解放させたりするためのトランスファ歯車も備えられている。こうすれば、両方の間隙が制御され、プロセスエンジニアは、処理対象の基板周辺の処理条件をより良く制御することができる。
【0027】
好ましい一実施形態では、本発明は、カリフォルニア州フリーモント市のラムリサーチコーポレーションから市販されている静電結合型プラズマリアクタなどのプラズマリアクタにおいて実施される。以下では、静電結合型プラズマリアクタを図示して説明するが、本発明は、例えば、誘導結合型またはECRリアクタなどのプラズマを生成させるのに適した任意のプラズマリアクタにおいて実施可能である。
【0028】
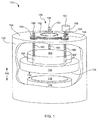
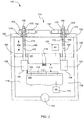
図1および図2は、本発明の一実施形態に従ってプラズマリアクタ100を示す概略図である。プラズマリアクタ100は、一般に、プラズマ処理チャンバ102を備える。チャンバ102内には、上部電極104および下部電極106が設けられている。上部電極104は、下部電極106の上方に設けられ、整合回路網(図面を簡略化するため図示せず)を介して、第1のRF(高周波)電源108に結合されている。第1のRF電源108は、上部電極104にRF(高周波)エネルギを供給するように構成されている。また、下部電極106は、第2のRF電源110に結合されており、第2のRF電源110は、下部電極106にRFエネルギを供給するように構成されている。
【0029】
上部電極104と下部電極106との間の間隙111は、一般に、処理中における活性領域の容積を決定する。したがって、間隙111の寸法は、圧力および/またはプラズマ密度などの種々のパラメータを制御できるように構成される。理論に縛られることは望ましくないが、プラズマ密度は、容積の減少に伴って増大し、容積の増大に伴って減少すると考えられる。当業者に周知のように、プラズマ密度は、例えば、エッチング速度などの処理速度に影響を及ぼし易い。したがって、間隙は、処理に適した所望の容積と所望のエッチング速度とのバランスが保たれるように、構成される。
【0030】
さらに、間隙111は、一般に、基板の上方の活性領域の圧力制御に重要であると考えられる。一般則として、圧力は容積に反比例するため、容積の減少は圧力の増大に対応し、容積の増大は圧力の減少に対応する。したがって、間隙111の寸法は、処理に適した所望の容積と所望の圧力とのバランスが保たれるように、構成されることが好ましい。
【0031】
また、プラズマリアクタ100は、下部電極106の上面に設けられたチャック112を備える。チャック112は、処理中に基板114を保持するように構成されている。チャック112は、例えば、基板114を静電力によって表面に固定するESC(静電)チャックであってもよい。また、基板114は、処理対象の加工物であり、例えば、エッチング、堆積、その他の処理が施される半導体基板や、フラットパネルディスプレイに処理されるガラスパネルであってもよい。
【0032】
プラズマチャンバ102内には、さらに、エッチャントソースガスなどのガス状のソース材料を上部電極と基板との間の活性領域中に放出するためのガスポート116が設けられている。図2に示すように、ガスポート116は、上部電極104内部に設けられる。また、処理チャンバの壁部と下部電極106の間には、一般に、処理中に形成された副産ガスを排出するための排気ポート118が設けられている。図2では、排気ポート118は、チャンバ102の底部に設けられたポンプ120に結合されている。ポンプ120は、一般に、チャンバ102内の圧力を適切に維持するように設けられている。一実装例では、ターボ分子ポンプが使用される。
【0033】
例えば、プラズマを生成するために、プロセスガスがガスポート116を介してチャンバに導入される。次に、電力が電極104,106に供給され、上部電極104と下部電極106との間に強い電場が形成される。この分野において周知のように、プロセスガスの中性ガス分子は、強い電場に曝されると電子を失い、正に帯電したイオンが残る。この結果、プラズマ中には、正電荷を帯びたイオンと、負電荷を帯びた電子と、中性ガスの分子とが、含まれる。また、基板の真上では、一般に、シース電圧が生成される。これは、基板に向かってイオンを加速させるため、中性の種と共に処理の反応を活性化させる。
【0034】
さらに詳しく説明するため、図4は、プラズマリアクタ(例えばプラズマリアクタ100)内での基板の処理に関係する関連動作の流れ図を示す。処理に先行して、まず、基板の出し入れを含む従来の前処理工程が実施される。代表的な処理は、通常、5つの工程を経る。第1の工程201は、処理チャンバを所望の圧力までポンピングすることを含む。第2の工程202は、プロセスガスを処理チャンバに流入させ、圧力を安定させることを含む。ガスが安定すると、第3の工程204において、プロセスガスからプラズマを発生させる。プラズマが発生すると、第4の工程206において、チャンバ内でプラズマを特定の圧力で安定させる。チャンバの圧力が安定すると、第5の工程208において、基板が処理される。
【0035】
図1および図2に戻って、プラズマ処理チャンバ100は、さらに、一般にプラズマを基板114の上方の領域に閉じ込めるように構成された閉じ込めリング130を備える。図2に示すように、閉じ込めリング130の第1の部分は、上部電極104の外周を囲むように配置され、第2の部分は、上部電極104と下部電極106の間の間隙111を囲むように配置されている。これによって、閉じ込めリング130は、基板114の上方の活性領域の少なくとも一部を囲む。閉じ込めリング130は、処理の均一性を高めるために、基板114の周辺において対称的に配置されている。
【0036】
図示するように、間隙132は、通常、閉じ込めリング130の下端134と下部電極106との間に形成される。間隙132は、一般に、上部電極104および閉じ込めリング130によって規定された容積中にプラズマを実質的に閉じ込めるとともに、排出ガスのコンダクタンスを制御するために、設けられる。閉じ込めリング130の下端は、下部電極106の上面に対して均一な間隔で(例えば平行に)設けられることが好ましい。こうすれば、基板114の表面におけるガスの分布を均一に維持することができる。
【0037】
間隙132の寸法は、一般に、処理中に活性領域から排出ガスが除去される速度を決定する。理論に縛られることは望ましくないが、間隙が小さすぎると、ガスの流れが妨げられるため、エッチング速度が不均一になり、基板の周囲に沿って微粒子汚染が生じると考えられる。また、間隙が大きすぎると、プラズマを適切な容積中に適切に閉じ込めることができず、エッチング速度が不均一になる(例えば不均一なプラズマ)と考えられる。さらに、一般に、間隙は、基板の上方の活性領域の圧力制御に重要であると考えられる。すなわち、圧力は排気速度に反比例するため、コンダクタンスの減少は圧力の増大に対応し、コンダクタンスの増大は圧力の減少に対応する。したがって、間隙の寸法は、所望のコンダクタンスと所望の圧力とのバランスを保つように、構成されることが好ましい。
【0038】
図1および図2には、上部電極104と下部電極106との間で、閉じ込めリング130を移動させるように構成された直線駆動アセンブリ150が、本発明の一実施形態に従って示されている。処理中に閉じ込めリング130を上下に移動させることによって、プラズマ処理チャンバ102から排出されるエッチャントソースガスのコンダクタンスが増減され、圧力が処理に適した所望の圧力範囲内に維持される。例えば、圧力を調整することによって、基板の処理中に生じる温度の変動に適合させ、この結果、基板間の均一性を維持することができる。さらに、直線駆動アセンブリ150は、基板114の出し入れのために閉じ込めリングを上下に移動させるように構成される。
【0039】
直線駆動アセンブリ150は、一般に、1つの第1の歯車152と、複数の第2の歯車154と、を備える。第1の歯車152と複数の第2の歯車154との双方は、処理チャンバ102のカバー156によって回転可能に支持されている。さらに、複数の第2の歯車154は、第1の歯車152に動作可能に係合している。また、直線駆動アセンブリ150は、第1の部分160と第2の部分162とをそれぞれ有する複数の位置決め部材158を備える。各位置決め部材158は、互いに平行である。第1の部分160は、それぞれ、第2の歯車154の1つに移動可能に結合しており、位置決め部材158を直線方向166に移動させることを可能にする。第2の部材162は、それぞれ、閉じ込めリング130に取り付けられている。図1に示すように、直線方向166は、基板114の上面によって形成される平面に垂直な方向である。また、位置決め部材158とカバー156との間には、一般に、シール175が設けられており、境界を塞ぎ、漏れを排除する。
【0040】
さらに、直線駆動アセンブリは、モータ161と、モータ161に取り付けられた駆動歯車163と、を備える。モータは、当業者に周知であり、簡略化のため説明を省略する。駆動歯車163は、第1の歯車152に動作可能に係合しており、モータが作動するときに第1の歯車152を駆動させるように構成されている。モータ161は駆動歯車163を駆動し、駆動歯車163は第1の歯車152を駆動し、第1の歯車152は複数の第2の歯車154を駆動し、複数の第2の歯車154は対応する位置決め部材158を直線方向166に移動させる。この結果、閉じ込めリング130は、上部電極104と下部電極106との間で直線方向166に移動する。
【0041】
直線状の経路に沿った位置決め部材158の移動方向は、一般に、第2の歯車154の回転方向によって決定される。例えば、直線駆動アセンブリ150は、第2の歯車154が時計回りに回転する場合には位置決め部材158を上方に移動させ、第2の歯車154が反時計回りに回転する場合には位置決め部材158を下方に移動させるように構成されている。
【0042】
図2を参照すると、複数の位置決め部材158は、複数の第2の歯車154にねじ込み可能に結合されている。すなわち、位置決め部材158と第2の歯車154とがねじで係合することによって、第2の歯車154が回転する場合に、位置決め部材158は直線方向に移動する。第2の歯車154は、一般に、雌ねじ切り面を有するナット部分170を備えており、位置決め部材158は、一般に、雄ねじ切り面を有するねじ山部分172を備えている。各位置決め部材158の雄ねじ切り面は、対応する第2の歯車154の雌ねじ切り面と噛み合うように構成されている。したがって、第2の歯車154が回転する場合には、位置決め部材158のねじ山部分172は、回転する第2の歯車154のナット部分170を通って移動する。ねじの利用による具体的な利点の1つは、ねじは常に係合しているため、非常に正確な移動が可能となることである。
【0043】
さらに、位置決め部材/第2の歯車構成は、一般に、ナット部分170が1回転する毎に、位置決め部材158がねじ山1つ分だけ移動するように構成されている。当業者に周知のように、ねじの長さ方向に沿って測定された隣接するねじ山の対応部分間の距離は、一般に、ピッチと呼ばれる。したがって、ナット部分170が1回転する毎に、位置決め部材158は1ピッチ分の距離だけ移動する。例えば、ねじ山が1インチあたり32個切られている場合には、第2の歯車(例えばナット部分170)が1回転する毎に、位置決め部材158は、1/32インチ移動する。なお、ねじ山の切り込みは、より高い分解能を備えるように構成されていてもよい。すなわち、1インチあたりに切り込むねじ山の数を増やせば、位置決め部材158をより細かな変位量で移動させることができ、この結果、圧力をより細かく調整することができる。例えば、1インチあたりの約10個から約40個のねじ山を有するねじが上手く作用する。なお、これは限定事項ではなく、1インチあたりのねじ山の数は、各処理チャンバの具体的な設計に従って変更可能である。
【0044】
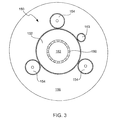
本発明の特徴をさらに説明するため、図3は、プラズマリアクタ100の直線駆動アセンブリ150の上面図を示す。前述したように、直線駆動アセンブリ150は、1つの第1の歯車152と、複数の第2の歯車154と、複数の位置決め部材158と、駆動歯車163と、を備える。複数の第2の歯車154と駆動歯車163とは、一般に、第1の歯車152の周辺に設けられる。第2の歯車154の動きは、互いに同期している。すなわち、移動方向(例えば時計回りまたは反時計回り)と移動量(例えば移動する歯の数)とは、同じである。
【0045】
ここでは、直線駆動アセンブリ150は、外平歯車(external spur gears)を使用するものとして、図示して説明している。しかしながら、異なるタイプの処理チャンバに適応したり、直線運動を可能にするために必要な他の外付けの要素に適合したりするために、他の歯車構造を採用してもよい。例えば、内歯車(例えばプラネタリ歯車)も上手く作用する。内歯車が用いられる場合には、複数の第2の歯車および駆動歯車は、第1の歯車の内周に設けられる。
【0046】
図3に示すように、直線駆動アセンブリ150は、3つの第2の歯車154と、3つの位置決め部材158と、を備えている。当業者に周知のように、平面は3点によって規定されるので、閉じ込めリングを移動させる位置決め部材は、3つ存在することが好ましい。3つの位置決め部材158は、閉じ込めリング130を、その重心に直交する方向に移動させるように構成されているため、閉じ込めリング130は、バランス良く水平な状態に維持される。図示するように、第2の歯車/位置決め部材構成は、それぞれ、第1の歯車152の周りに対称的に間隔を空けた状態で配置されており、各位置決め部材158は、対応する第2の歯車154の中心に軸配向されている。なお、本発明は、3つの位置決め部材に限定されず、バランスを保ちつつ閉じ込めリングを移動させるのに適した任意の数の位置決め部材を用いることが可能である。
【0047】
当業者に周知のように、全ての歯車を適切に噛み合わせるためには、すなわち、ズレを生じることなく回転させるためには、歯車は、ほぼ同じ寸法の類似の歯で構成される必要がある。さらに、噛み合った歯車同士が滑らかに、かつ、静かに移動するように、歯車と歯車との間には、通常、小さな隙間が設けられる。歯車アセンブリによる具体的な利点の1つは、歯車は常に噛み合わされているので、クリープすなわちズレが生じず、この結果、非常に正確な移動が可能となることである。
【0048】
直線駆動アセンブリの感度および分解能を決定する重要な要因の1つは、歯車の寸法(例えば歯)を適切に選択することにある。一般に、歯の数が多い程、分解能が高いと考えられている。すなわち、歯の数が多い程、位置決め部材によって移動される距離をより小さな変位量で変化させることができ、したがって、圧力をより細かく変化させることができる。本質的に、各歯車は、x歯数分解能を有する。より詳しくは、歯の数は、歯車を構成する個々のセグメントとして記述することができる。例えば、10個の歯を有する第2の歯車は、10個のセグメントに分割される。これらのセグメントは、第2の歯車の漸進的な動きに対応している。歯1個分だけ移動する場合には、第2の歯車も1セグメントだけ移動するため、第2の歯車の回転は1/10回転するのみである。第2の歯車と位置決め部材とは係合しているため、位置決め部材は、これに応じて1/10ピッチだけ移動する。ピッチが1/32インチである場合には、位置決め部材は、1/320インチ移動する。例えば、約10〜約48個の歯を有する第2の歯車は、上手く作用する。なお、これは限定事項ではなく、第2の歯車に設けられる歯の数は、各処理チャンバの具体的な設計に従って変更可能である。
【0049】
歯車は、金属やプラスチックなどの任意の適切な材料で形成可能であり、鋳造、鍛造、押出成形、射出成形などの任意の既知のプロセスを使用して製造可能である。しかしながら、歯車または処理チャンバのカバーが熱膨張を生じる場合(例えば温度が高い場合)には、熱膨張係数のほぼ等しい材料でこれらを形成する必要がある。こうすれば、歯車や処理チャンバのカバーは、ほぼ同じ速度で膨張する。これは、熱膨張が小さい場合には要因とならない。歯車間の隙間は、通常、熱膨張量よりも大きいためである。さらに、歯車間に潤滑剤すなわちオイルを用いることによって、熱膨張による影響を抑制し、噛み合っている歯車間の磨耗を低減させるようにしてもよい。
【0050】
前述のように、複数の歯車は、処理チャンバのカバーによって回転可能に支持されている。一実施形態では、歯車の自由な回転を可能にする軸受歯車が使用される。図3に示すように、第1の歯車152は、1組の軸受け180と連携した内周を有する同心環として構成されている。より具体的には、1組の軸受け180は、第1の歯車152の内周とカバー156の部分182との間に設けられている。したがって、カバー156の部分182は、ガスポート、センサ、マノメータなどの通路として使用可能である。軸受歯車は周知であり、簡略化のためこれ以上の説明は省略する。また、第2の歯車は、処理チャンバのカバーに固定されている。一実装例では、第2の歯車を処理チャンバのカバーに取り付けるために、スラスト軸受が使用される。
【0051】
直線駆動アセンブリ(例えば150)は、一般に、処理チャンバ内の圧力の変動を低減させるように構成された閉ループ制御システムの一部を構成している。例えば、プラズマ処理装置は、基板上方の活性領域の圧力を測定するための圧力センサと、測定された圧力をモニタするためのコントローラすなわちCPUと、を含むように構成されていてもよい。直線駆動アセンブリのモータと圧力センサとの双方は、コントローラに動作可能に結合されている。圧力センサは、測定された圧力に対応する電気圧力信号を生成するように構成されている。コントローラは、圧力センサから電気圧力信号を受信し、受信した信号に少なくとも部分的に基づく対応する電気制御信号をモータに送信するように構成されている。さらに、モータは、コントローラによって送信された電気制御信号を受信して、実行するように構成されている。電気制御信号は、一般に、モータの具体的な方向および漸進的な位置の変化に関係する。圧力センサとコントローラとモータとは、当該分野において周知であるため、詳細な説明は省略する。
【0052】
本発明の別の実施形態に従えば、直線駆動アセンブリの直線運動は、上部電極と基板との間の間隙を制御するように構成されている。この具体的な実施形態では、位置決め部材は、閉じ込めリングに代えて、上部電極に取り付けられる。このとき、直線駆動アセンブリは、上部電極を上下に移動させるように構成され、これによって、基板上方の活性領域の容積が調整される。容積を調整することによって、プラズマ密度や圧力などのプラズマ処理に関連した種々のパレメータが、処理に適した所望のレベルに維持される。
【0053】
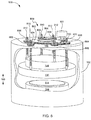
本発明のこの態様の説明を容易にするため、図5は、処理チャンバ102内で上部電極104を移動させるように構成された直線駆動アセンブリ700を備えるプラズマリアクタ100を示す。この図において、直線駆動アセンブリ700は、図1〜図4に関連して既述した発明の教示内容に従って作成されているため、簡単な説明とする。
【0054】
直線駆動アセンブリ700は、一般に、1つの第1の歯車702と、複数の第2の歯車704と、を備える。第1の歯車702と複数の第2の歯車704との双方は、処理チャンバ102のカバー156によって回転可能に支持されている。さらに、複数の第2の歯車704は、第1の歯車702に動作可能に係合している。また、直線駆動アセンブリ700は、第1の部分710と第2の部分712とをそれぞれ有する複数の位置決め部材706を備える。第1の部分710は、第2の歯車704に対して直線方向166に移動可能に結合しており、第2の部分712は、上部電極104に取り付けられている。図示するように、直線方向166は、基板114の上面によって形成される平面に垂直な方向である。さらに、位置決め部材706は、第2の歯車704にねじ込み可能に結合されている。前述したように、位置決め部材706と第2の歯車704とがねじで係合することによって、第1の歯車702が回転する場合に、位置決め部材706は直線方向166に移動する。
【0055】
また、直線駆動アセンブリ700は、モータ161と、モータ161に取り付けられた駆動歯車163と、を備える。駆動歯車163は、第1の歯車702に動作可能に係合しており、モータ161が作動するときに第1の歯車702を駆動させるように構成されている。モータ161は駆動歯車163を駆動し、駆動歯車163は第1の歯車702を駆動し、第1の歯車702は複数の第2の歯車704を駆動し、複数の第2の歯車704は対応する位置決め部材706を直線方向166に移動させる。この結果、上部電極104は、直線方向166に移動する。
【0056】
以上では、直線駆動アセンブリは、閉じ込めリングまたは上部電極を移動させるものとして図示され説明されているが、異なるプロセスに適応できるように、他の部品を移動させるようにしてもよい。例えば、直線駆動アセンブリは、下部電極を移動させるために用いられていてもよい。なお、本発明は、処理チャンバ内の部品を移動させることに限定されない。例えば、直線駆動アセンブリは、チャンバの外側に設けられたアンテナや電極を移動させるために用いられていてもよい。このタイプのシステムが使用される場合には、直線駆動アセンブリは、一般に、図示するような処理チャンバのカバーに代えて、プラズマリアクタのフレームに結合される。また、直線駆動アセンブリは、1つの部品を移動させることに限定されず、複数の部品を移動させるのに使用することも可能である。例えば、直線駆動アセンブリは、複数の閉じ込めリングを移動させるように、あるいは、閉じ込めリングおよび上部電極などの複数の部品の組み合わせを移動させるように、構成されていてもよい。
【0057】
本発明の別の実施形態に従えば、直線駆動アセンブリの直線運動は、閉じ込めリングと上部電極との双方を移動させるように構成されている。こうすれば、処理に関連する種々のパラメータをより良く制御することが可能になる。例えば、閉じ込めリングと上部電極との双方を移動させることによって、基板上方の活性領域内の圧力およびプラズマ密度を変化させることができる。したがって、これらの物体のいずれかを移動させることによって、基板間の均一性を維持してもよい。
【0058】
本発明のこの態様の説明を容易にするため、図6および図7は、処理チャンバ102内で複数の物体を移動させるように構成された直線駆動アセンブリ800を備えるプラズマリアクタ100を示す。この図では、直線駆動アセンブリ800は、図1〜図5に関連して既述した発明の教示内容に従って作成されている。そして、直線駆動アセンブリ800は、処理に関連する種々のパラメータを制御するために、上部電極104と下部電極106との間で閉じ込めリング130を移動させるように、かつ、処理チャンバ102内で上部電極104を移動させるように、構成されている(いずれも優れた移動制御が用いられる)。
【0059】
直線駆動アセンブリ800は、一般に、1つの第1の歯車802と、複数の第2の歯車804と、を備える。第1の歯車802と複数の第2の歯車804との双方は、処理チャンバ102のカバー156によって回転可能に支持されている。さらに、複数の第2の歯車804は、第1の歯車802に動作可能に係合している。また、直線駆動アセンブリ800は、複数の第3の歯車806と、複数の第4の歯車808と、を備えており、これらは、処理チャンバ102によって固定された状態で、かつ、回転可能に支持されている。第1の位置決め部材810のセットは、第3の歯車806のセットに移動可能に結合しており、第2の位置決め部材812のセットは、第4の歯車808のセットに移動可能に結合している。双方の位置決め部材810,812のセットは、直線方向166に回転可能に結合されている。図示するように、直線方向166は、基板114の上面によって形成される平面に垂直な方向である。さらに、第1の位置決め部材810のセットは、閉じ込めリング130に取り付けられており、第2の位置決め部材812のセットは、上部電極104に取り付けられている。
【0060】
さらに、第2の歯車804は、処理チャンバ102に移動可能に結合しており、第3の歯車806および第4の歯車808に対して係合したり離れたりするように構成されている。より具体的には、第2の歯車804は、処理チャンバ102のカバーの上に少なくとも2つの位置を有する。第1の位置(図示された位置)は、第2の歯車804を第3の歯車806に動作可能に係合させ、第2の位置は、第2の歯車804を第4の歯車808に動作可能に係合させる。一実施形態では、第2の歯車804は、カバー156に設けられた溝を通ってこれらの両位置間でスライドするように構成されている。この実施形態では、これらの両位置間で第2の歯車を移動させ、第3の歯車および第4の歯車に対して第2の歯車を接続したり非接続したりするために、クラッチが設けられている。一実装例では、クラッチは、第2の歯車804の係合および解放を自動的に実行する閉ループプロセスの一部として構成される。クラッチは、当該分野で周知であるため、詳細な説明は省略する。
【0061】
また、直線駆動アセンブリは、モータ161と、モータ161に取り付けられた駆動歯車163と、を備える。駆動歯車163は、第1の歯車802に動作可能に係合しており、モータ161が作動するときに第1の歯車802を駆動させるように構成されている。第2の歯車804が第3の歯車806と係合すると、モータ161は駆動歯車163を駆動し、駆動歯車163は第1の歯車802を駆動し、第1の歯車802は複数の第2の歯車804を駆動し、複数の第2の歯車804は複数の第3の歯車806を駆動し、第3の歯車は対応する位置決め部材810を直線方向166に移動させる。この結果、閉じ込めリング130は、上部電極104と下部電極106との間で直線方向166に移動する。第2の歯車804が第4の歯車808に係合すると、モータ161は駆動歯車163を駆動し、駆動歯車163は第1の歯車802を駆動し、第1の歯車802は複数の第2の歯車804を駆動し、複数の第2の歯車804は複数の第4の歯車808を駆動し、第4の歯車は対応する位置決め部材812を直線方向166に移動させる。この結果、上部電極102は、直線方向166に移動する。
【0062】
詳細には、第1の位置決め部材810のセットは、第3の歯車806にねじ入み可能に結合されており、第2の位置決め部材812は、第4の歯車808にねじ込み可能に結合されている。前述したように、位置決め部材と対応する歯車とがねじで係合することによって、対応する歯車が回転する場合に、位置決め部材は直線方向に移動する。
【0063】
さらに、複数の第2の歯車804と駆動歯車163とは、一般に、第1の歯車802の周辺に設けられる。したがって、第2の歯車の動きは、互いに同期している。すなわち、移動方向(例えば時計回りまたは反時計回り)と、移動量(例えば移動する歯の数)とは、同じである。さらに、第3の歯車806のセットは、一般に、第2の歯車804の近くに、かつ、閉じ込めリング130の上方に設けられており、第4の歯車808のセットは、一般に、第2の歯車804の近くに、かつ、上部電極102の上方に設けられている。図示するように、第3の歯車/位置決め部材構成および第4の歯車/位置決め部材構成は、それぞれ、第1の歯車の周りに対称的に間隔を空けた状態で配置され、各位置決め部材は、対応する歯車の中心に軸配向されている。
【0064】
図1〜図5で説明した直線駆動アセンブリと同様に、図6および図7で説明した直線駆動アセンブリは、歯車の歯の数および位置決め部材のピッチを調整することによって、高分解能に構成される。また、図6および図7の直線駆動アセンブリは、前述したように制御ループシステムの一部を構成していてもよい。
【0065】
以上から分かるように、本発明は、従来技術と比べて多くの利点を提供することができる。別の実施形態または実装例であっても、以下に挙げる1以上の利点を有する。
【0066】
本発明の利点の1つは、直線駆動アセンブリが高分解能、高感度、高信頼度の正確な移動を提供することである。この結果、閉じ込めリングや上部電極などの部品を、より広範囲の制御で移動させることができる。したがって、ウエハ領域圧力およびプラズマ密度などのパラメータを制御して、処理の均一性(すなわち基板表面全体の均一性および基板間の均一性)を高めることによって、基板のスループットを向上させ、デバイス故障を低減させ、処理対象の基板の全体的な生産性を高めることができる。
【0067】
本発明の他の利点は、コスト有効性である。例えば、本発明は、単一のモータのみを使用して、処理チャンバ内の複数の物体を移動させるように、構成される。本発明は、さらに、消耗部品(例えば磨耗)の量を減らすことができる。この結果、システムを取得および維持するコストが低減される。本発明の他の具体的な利点は、リアルタイムで制御が行われることである。つまり、1枚の基板の処理期間中に直線移動を実施することができる。
【0068】
以上では、本発明をいくつかの好ましい実施形態で説明したが、本発明の範囲内で、種々の代替、置き換え、および等価物が可能である。例えば、平歯車のみを図示して説明したが、ヘリカル歯車、山歯歯車、ウォーム歯車、傘歯車、扇形歯車、ベルト、および/または、チェーンなどの他の歯車構成を使用してもよい。また、位置決め部材/第2の歯車構成は、直線方向に移動するように構成されたラックピニオン歯車として構成されていてもよい。さらに、駆動歯車を有するモータのみを図示して説明したが、他の駆動機構を用いるようにしてもよい。例えば、モータは、第1の歯車に直接結合されていてもよいし、ベルトまたはチェーンを用いて間接的に結合されていてもよい。
【0069】
なお、本発明による方法および装置を実現する代替の方法が数多く存在する。例えば、直線駆動アセンブリは、閉じ込めリングおよび上部電極を移動させるように構成されたものとして説明されているが、下部電極などの他の物体を移動させるように構成されてもよい。さらに、物体を、基板に垂直な方向以外の直線方向に移動させてもよい。例えば、直線駆動アセンブリは、基板の表面に平行な方向に物体を移動させるために用いられてもよい。
【0070】
また、本発明は、エッチングまたはデポジションに適した任意のリアクタで使用可能である。例えば、本発明は、化学気相蒸着(CVD)やプラズマCVD(PECVD)、スパッタリングなどの物理蒸着(PVD)を含む適切で既知の任意のデポジションプロセスで使用可能である。さらに、本発明は、ドライエッチング、プラズマエッチング、反応性イオンエッチング(RIE)、磁気反応性イオンエッチング(MERIE)、電子サイクロトロン共鳴(ECR)などを含む適切で既知の任意のエッチングプロセスで使用可能である。
【0071】
したがって、添付した特許請求の範囲は、このような代替、置換、等価物の全てを本発明の真の趣旨および範囲内に含むものとして解釈される。
【図面の簡単な説明】
本発明は、同様の要素に同様の番号が与えられた添付図面において、限定的ではなく例示的に示される。
【図1】 本発明の一実施形態に従って、一部が除去された状態のプラズマリアクタを示す透視図である。
【図2】 図1のプラズマリアクタの側方断面図である。
【図3】 図1のプラズマリアクタの上方断面図である。
【図4】 本発明の一実施形態に従って、図1〜図3のプラズマリアクタ内での基板の処理に関係する関連工程を示す流れ図である。
【図5】 本発明の一実施形態に従って、一部が除去された状態のプラズマリアクタを示す透視図である。
【図6】 本発明の一実施形態に従って、一部が除去された状態のプラズマリアクタを示す透視図である。
【図7】 図6のプラズマリアクタの上方断面図である。
【符号の説明】
100…プラズマリアクタ
102…プラズマ処理チャンバ
104…上部電極
106…下部電極
108…第1のRF電源
110…第2のRF電源
111…間隙
112…チャック
114…基板
116…ガスポート
118…排気ポート
120…ポンプ
130…閉じ込めリング
132…間隙
134…閉じ込めリングの下端
150…直線駆動アセンブリ
152…第1の歯車
154…第2の歯車
156…処理チャンバのカバー
158…位置決め部材
160…位置決め部材の第1の部分
161…モータ
162…位置決め部材の第2の部分
163…駆動歯車
166…直線方向
170…第2の歯車のナット部分
172…位置決め部材のねじ山部分
175…シール
180…軸受け
182…カバーの部分
700…直線駆動アセンブリ
702…第1の歯車
704…第2の歯車
706…位置決め部材
710…位置決め部材の第1の部分
712…位置決め部材の第2の部分
800…直線駆動アセンブリ
802…第1の歯車
804…第2の歯車
806…第3の歯車
808…第4の歯車
810…第1の位置決め部材
812…第2の位置決め部材
Claims (30)
- 基板を処理するためのプラズマ処理システムであって、
処理チャンバ内にプラズマを閉じ込めるための部品である閉じ込めリングと、
前記閉じ込めリングを、前記基板の前記処理中に、直線方向に移動させるための歯車駆動アセンブリと、
を備え、
前記歯車駆動アセンブリは、
第1の歯車と、
複数の第2の歯車と、
複数の位置決め部材と、
を備え、
前記位置決め部材の各々は、別個の第2の歯車に関連し、
前記第1の歯車は、前記複数の第2の歯車を駆動するように構成されており、
前記第2の歯車の各々は、関連する前記位置決め部材を前記直線方向に移動させるように構成されており、
前記位置決め部材の各々は、前記閉じ込めリングに取り付けられており、この結果、前記位置決め部材が前記直線方向に移動するときに、前記閉じ込めリングは移動するプラズマ処理システム。 - 請求項1記載のプラズマ処理システムであって、
前記歯車駆動アセンブリは、前記基板の上方の圧力を制御するために、前記閉じ込めリングを移動させるように構成されているプラズマ処理システム。 - 請求項1記載のプラズマ処理システムであって、さらに、
処理チャンバ内に電場を発生させるための電極を備えるプラズマ処理システム。 - 請求項3記載のプラズマ処理システムであって、
前記電極は、前記処理チャンバ内に設けられているプラズマ処理システム。 - 請求項3記載のプラズマ処理システムであって、
前記歯車駆動アセンブリは、さらに、前記電極を前記直線方向に移動させるように構成されており、
前記歯車駆動アセンブリは、前記直線方向に前記閉じ込めリングと前記電極とを独立して移動させるよう構成されているプラズマ処理システム。 - 請求項1または請求項2記載のプラズマ処理システムであって、
前記閉じ込めリングの位置は、前記基板が処理のために前記処理チャンバ内に配置されたときに、前記閉じ込めリングと前記基板との間に、間隙を形成するように構成されており、
前記間隙の寸法は、そこを通るガスの流れを制御するために、処理中に、前記閉じ込めリングを前記直線方向に移動させることによって変更されるプラズマ処理システム。 - 請求項1記載のプラズマ処理システムであって、
前記プラズマ処理システムは、処理チャンバを備え、
前記第1の歯車と前記第2の歯車の各々とは、前記処理チャンバによって回転可能に支持されており、
前記複数の第2の歯車は、前記第1の歯車に動作可能に係合しており、
前記複数の第2の歯車は、それぞれ、軸と、前記軸に設けられた第1のねじ切り面と、を有し、
前記関連する位置決め部材の各々は、直線方向の移動を提供するために、前記第2の歯車の前記第1のねじ切り面に移動可能に結合された第2のねじ切り面を有するプラズマ処理システム。 - 請求項7記載のプラズマ処理システムであって、
前記歯車駆動アセンブリは、さらに、
前記第1の歯車を回転させるための駆動装置を含み、
前記駆動装置は、
モータと、
前記モータに回転可能に結合された駆動歯車と、
備え、
前記駆動歯車は、前記第1の歯車に動作可能に係合しており、
前記モータが前記駆動歯車を回転させると、前記駆動歯車は前記第1の歯車を駆動して回転させ、前記第1の歯車は前記複数の第2の歯車を駆動して回転させ、前記回転する第2の歯車は前記位置決め部材を前記直線方向に移動させるプラズマ処理システム。 - 請求項3記載のプラズマ処理システムであって、
前記位置決め部材は第1の位置決め部材であり、
前記歯車駆動アセンブリは、さらに、
複数の第3の歯車と、
複数の第2の位置決め部材と、
を備え、
前記第1の歯車は、前記複数の第3の歯車を駆動するように構成されており、
前記複数の第3の歯車は、前記複数の第2の位置決め部材を前記直線方向に移動させるように構成されており、
前記複数の第2の位置決め部材は、前記電極に取り付けられており、この結果、前記複数の第2の位置決め部材が前記複数の第3の歯車によって移動するときに、前記電極は前記直線方向に移動するプラズマ処理システム。 - 請求項9記載のプラズマ処理システムであって、
前記歯車駆動アセンブリは、さらに、
前記複数の第2の歯車または前記複数の第3の歯車を前記第1の歯車に対して係合させたり解放させたりするためのトランスファ歯車を備え、
前記複数の第2の歯車の内の特定の歯車が前記トランスファ歯車に係合する場合には、前記関連する第1の位置決め部材が前記直線方向に移動し、前記複数の第3の歯車の内の特定の歯車が前記トランスファ歯車に係合する場合には、前記第2の位置決め部材が前記直線方向に移動するプラズマ処理システム。 - 請求項10記載のプラズマ処理システムであって、
前記第1の歯車と前記複数の第2の歯車と前記複数の第3の歯車と前記トランスファ歯車とは、前記処理チャンバによって回転可能に支持されており、
前記トランスファ歯車は、前記第1の歯車に動作可能に係合しており、
前記複数の第2の歯車の各々は、第1のねじ切り部を有し、
前記第1の位置決め部材の各々は、直線方向の移動を提供するために、前記複数の第2の歯車の内の関連する歯車の前記第1のねじ切り部に移動可能に結合された第2のねじ切り部を有し、
前記複数の第3の歯車の各々は、第3のねじ切り部を有し、
前記第2の位置決め部材の各々は、直線方向の移動を提供するために、前記複数の第2の歯車の内の関連する歯車の前記第3のねじ切り部に移動可能に結合された第4のねじ切り部を有するプラズマ処理システム。 - 基板のプラズマ処理に関連する閉じ込めリングを、前記基板の処理中に移動させるための直線駆動アセンブリであって、
第1の歯車と、
前記第1の歯車に動作可能に係合して移動可能に接触する複数の第2の歯車と、
それぞれが第1の部分と第2の部分とを有する複数の位置決め部材であって、前記第1の部分は、前記複数の第2の歯車の内の1つの歯車に対して直線方向に移動可能に結合されており、前記第2の部分は、前記物体に取り付けられており、前記複数の第2の歯車と前記複数の位置決め部材とは、前記第1の歯車の周辺に対称的に間隔を空けた状態で設けられている、前記位置決め部材と、
を備え、
前記位置決め部材の各々は、前記閉じ込めリングに取り付けられている直線駆動アセンブリ。 - 請求項12に記載された直線駆動アセンブリであって、
前記位置決め部材の各々は、前記複数の第2の歯車の内の関連する歯車にねじ込み可能に結合されている、直線駆動アセンブリ。 - 請求項13記載の直線駆動アセンブリであって、
前記位置決め部材の各々は、一定のピッチを有する雄ねじ切り面を含み、
前記第2の歯車の各々は、前記雄ねじ切り面の前記ピッチと同じピッチを有する雌ねじ切り面を含み、
前記位置決め部材の各々の前記雄ねじ切り面は、前記第2の歯車の内の関連する歯車の前記雌ねじ切り面内に、回転可能に設けられている、直線駆動アセンブリ。 - 請求項12記載の直線駆動アセンブリであって、
前記位置決め部材の各々の前記第1の部分は、直線形の歯車である、直線駆動アセンブリ。 - 請求項12ないし請求項15のいずれか記載の直線駆動アセンブリであって、さらに、
前記第1の歯車を駆動するためのモータを備える、直線駆動アセンブリ。 - 請求項12記載の直線駆動アセンブリであって、
該直線駆動アセンブリは、基板を処理するためのプラズマ処理システムにおいて用いられる、直線駆動アセンブリ。 - 請求項1記載のプラズマ処理システムであって、
前記閉じ込めリングは、前記基板の上方の領域に前記プラズマを閉じ込めるプラズマ処理システム。 - 請求項1ないし請求項11のいずれか記載のプラズマ処理システムであって、
前記基板の表面上の所定の領域から材料を選択的に除去するために、前記処理においてエッチング動作が用いられる、または、前記基板の表面上の所定の領域に材料を選択的に蒸着するために、前記処理において蒸着動作が用いられるプラズマ処理システム。 - 請求項1記載のプラズマ処理システムであって、
前記歯車駆動アセンブリは、前記処理チャンバの第1の軸に沿って前記閉じ込めリングを移動させるように構成されており、
前記閉じ込めリングは、前記第1の軸に直交する平面内に配置されるプラズマ処理システム。 - 請求項2記載のプラズマ処理システムであって、
前記閉じ込めリングは、処理中に前記基板の表面における圧力を上げるために、第1の直線方向に移動され、
前記閉じ込めリングは、処理中に前記基板の表面における圧力を下げるために、前記第1の直線方向と逆向きの第2の直線方向に移動されるプラズマ処理システム。 - 請求項1記載のプラズマ処理システムであって、
前記第1の歯車は、前記処理チャンバに対して回転可能であり、
前記第2の歯車は、前記処理チャンバに対して移動可能であり、前記第1の歯車に移動可能に接触しており、
前記位置決め部材である位置決めシャフトは、前記第2の歯車に対して移動可能であり、前記第2の歯車に移動可能に接触しているプラズマ処理システム。 - 請求項22記載のプラズマ処理システムであって、
前記複数の第2の歯車と前記複数の位置決め部材とは、前記第1の歯車の周辺に対称的に間隔を空けた状態で設けられており、
前記第1の歯車が回転されて、前記複数の第2の歯車が前記第1の歯車に移動可能に接触したままである時に、前記複数の位置決めシャフトは、前記直線方向と平行に組織的に移動するプラズマ処理システム。 - 請求項12記載の直線駆動アセンブリであって、
前記位置決め部材の各々は、前記複数の第2の歯車の内の関連する歯車に対して移動可能である、直線駆動アセンブリ。 - 処理チャンバ内での処理中に、該処理チャンバの第1の軸に沿って閉じ込めリングを移動させるように構成された歯車構成であって、前記閉じ込めリングは、前記第1の軸に直交する平面内に配置されており、前記歯車構成は、
前記処理チャンバに対して回転可能である第1の歯車と、
前記処理チャンバに対して回転可能であり、前記第1の歯車に移動可能に接触する複数の第2の歯車と、
前記第1の軸と平行に配置された複数の位置決めシャフトであって、前記複数の位置決めシャフトの各々は、前記複数の第2の歯車の内の1つと前記閉じ込めリングとに結合されている、複数の位置決めシャフトと、
を備え、
前記第1の歯車が回転されて、前記複数の第2の歯車が前記第1の歯車に移動可能に接触したままである時に、前記複数の位置決めシャフトは、前記第1の軸と平行に組織的に移動する、歯車構成。 - 基板を処理するためのプラズマ処理システムであって、
前記処理のために内部でプラズマが発生および維持される処理チャンバと、
前記処理チャンバ内で前記プラズマに影響を与えるための処理部品である閉じ込めリングと、
前記プラズマによる前記基板の前記処理中に前記閉じ込めリングを直線方向に移動させるための歯車駆動アセンブリと、
を備え、
前記歯車駆動アセンブリは、
第1の歯車と、
複数の第2の歯車と、
複数の位置決め部材と、
を備え、
前記位置決め部材の各々は、別個の第2の歯車に関連し、
前記第1の歯車は、前記複数の第2の歯車を駆動するように構成されており、
前記第2の歯車の各々は、関連する前記位置決め部材を前記直線方向に移動させるように構成されており、
前記位置決め部材の各々は、前記閉じ込めリングに取り付けられており、この結果、前記位置決め部材が前記直線方向に移動するときに、前記閉じ込めリングは移動するプラズマ処理システム。 - プラズマ処理方法であって、
閉じ込めリングでプラズマを閉じ込める工程と、
前記プラズマによって基板を処理する工程と、
前記処理に影響を与えるために、前記処理中に、歯車アセンブリによって前記閉じ込めリングを直線方向に移動させる工程と
を備える方法。 - プラズマ処理チャンバ内で閉じ込めリングを移動させるための方法であって、
第1の歯車を回転させる工程と、
前記第1の歯車が第2の歯車に動作可能に係合した時に、前記回転する第1の歯車によって前記第2の歯車を回転させる工程と、
前記回転する第2の歯車によって直線状の経路に沿ってシャフトを移動させる工程であって、前記シャフトは、前記第1の歯車が時計回りに回転される時には第1の方向に移動し、前記第1の歯車が反時計回りに回転される時には第2の方向に移動する、工程と、
前記移動するシャフトにより前記直線状の経路に沿って前記閉じ込めリングを上下に移動させる工程と
を備える方法。 - 基板を処理するためのプラズマ処理システムであって、
プラズマを内部で発生し維持する処理チャンバと、
処理チャンバ内のプラズマに影響を与える処理部品としての閉じ込めリングと、
前記閉じ込めリングを、前記プラズマによる前記基板の処理中に、直線方向に移動させる歯車駆動アセンブリと
を備えるプラズマ処理システム。 - 請求項29記載のプラズマ処理システムであって、
前記歯車駆動アセンブリは、
第1の歯車と、
第2の歯車と、
位置決め部材と、
を備え、
前記第1の歯車は、前記第2の歯車を駆動するように構成されており、
前記第2の歯車は、前記位置決め部材を前記直線方向に移動させるように構成されており、
前記位置決め部材は、前記閉じ込めリングに取り付けられており、この結果、前記閉じ込めリングが前記直線方向に移動するよう前記位置決め部材が移動する
プラズマ処理システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/474,843 US6350317B1 (en) | 1999-12-30 | 1999-12-30 | Linear drive system for use in a plasma processing system |
| US09/474,843 | 1999-12-30 | ||
| PCT/US2001/000057 WO2001050498A1 (en) | 1999-12-30 | 2001-01-02 | Linear drive system for use in a plasma processing system |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2003519908A JP2003519908A (ja) | 2003-06-24 |
| JP2003519908A5 JP2003519908A5 (ja) | 2009-02-19 |
| JP4991069B2 true JP4991069B2 (ja) | 2012-08-01 |
Family
ID=23885169
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001550778A Expired - Lifetime JP4991069B2 (ja) | 1999-12-30 | 2001-01-02 | プラズマ処理システムで用いられる直線駆動システム |
Country Status (9)
| Country | Link |
|---|---|
| US (3) | US6350317B1 (ja) |
| EP (1) | EP1243017B1 (ja) |
| JP (1) | JP4991069B2 (ja) |
| KR (1) | KR100751748B1 (ja) |
| CN (1) | CN100392792C (ja) |
| AU (1) | AU2925701A (ja) |
| DE (1) | DE60127232T2 (ja) |
| IL (1) | IL150254A0 (ja) |
| WO (1) | WO2001050498A1 (ja) |
Families Citing this family (77)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0250853A (ja) * | 1988-08-12 | 1990-02-20 | Nec Corp | 画像形成装置 |
| US6350317B1 (en) * | 1999-12-30 | 2002-02-26 | Lam Research Corporation | Linear drive system for use in a plasma processing system |
| JP5165825B2 (ja) * | 2000-01-10 | 2013-03-21 | 東京エレクトロン株式会社 | 分割された電極集合体並びにプラズマ処理方法。 |
| GB0019848D0 (en) * | 2000-08-11 | 2000-09-27 | Rtc Systems Ltd | Apparatus and method for coating substrates |
| US6492774B1 (en) | 2000-10-04 | 2002-12-10 | Lam Research Corporation | Wafer area pressure control for plasma confinement |
| US6391787B1 (en) * | 2000-10-13 | 2002-05-21 | Lam Research Corporation | Stepped upper electrode for plasma processing uniformity |
| US20020142612A1 (en) * | 2001-03-30 | 2002-10-03 | Han-Ming Wu | Shielding plate in plasma for uniformity improvement |
| US20030024900A1 (en) * | 2001-07-24 | 2003-02-06 | Tokyo Electron Limited | Variable aspect ratio plasma source |
| US6806653B2 (en) * | 2002-01-31 | 2004-10-19 | Tokyo Electron Limited | Method and structure to segment RF coupling to silicon electrode |
| US6936135B2 (en) * | 2002-04-17 | 2005-08-30 | Lam Research Corporation | Twist-N-Lock wafer area pressure ring and assembly for reducing particulate contaminant in a plasma processing chamber |
| US6926803B2 (en) * | 2002-04-17 | 2005-08-09 | Lam Research Corporation | Confinement ring support assembly |
| KR101075046B1 (ko) | 2002-05-23 | 2011-10-19 | 램 리써치 코포레이션 | 반도체 공정용 플라즈마 반응기를 위한 다중부재 전극 및다중부재 전극의 일부를 교체하는 방법 |
| ITBO20020411A1 (it) * | 2002-06-27 | 2003-12-29 | Sir Meccanica S R L | Macchina alesatrice saldatrice portatile |
| KR100426816B1 (ko) * | 2002-07-31 | 2004-04-14 | 삼성전자주식회사 | 진공압조절장치가 개선된 플라즈마 처리장치 |
| JP2004119448A (ja) * | 2002-09-24 | 2004-04-15 | Nec Kyushu Ltd | プラズマエッチング装置およびプラズマエッチング方法 |
| US20040118344A1 (en) * | 2002-12-20 | 2004-06-24 | Lam Research Corporation | System and method for controlling plasma with an adjustable coupling to ground circuit |
| US20040261712A1 (en) * | 2003-04-25 | 2004-12-30 | Daisuke Hayashi | Plasma processing apparatus |
| US7296534B2 (en) * | 2003-04-30 | 2007-11-20 | Tokyo Electron Limited | Hybrid ball-lock attachment apparatus |
| US20070286965A1 (en) * | 2006-06-08 | 2007-12-13 | Martin Jay Seamons | Methods for the reduction and elimination of particulate contamination with cvd of amorphous carbon |
| US20060043067A1 (en) * | 2004-08-26 | 2006-03-02 | Lam Research Corporation | Yttria insulator ring for use inside a plasma chamber |
| US7343842B2 (en) * | 2004-10-28 | 2008-03-18 | Axon Llc | Apparatus for cutting film tubing |
| KR100790392B1 (ko) * | 2004-11-12 | 2008-01-02 | 삼성전자주식회사 | 반도체 제조장치 |
| KR100598988B1 (ko) * | 2005-05-18 | 2006-07-12 | 주식회사 하이닉스반도체 | 오버레이 버니어 및 이를 이용한 반도체소자의 제조방법 |
| US7897217B2 (en) * | 2005-11-18 | 2011-03-01 | Tokyo Electron Limited | Method and system for performing plasma enhanced atomic layer deposition |
| JP4865352B2 (ja) | 2006-02-17 | 2012-02-01 | 三菱重工業株式会社 | プラズマ処理装置及びプラズマ処理方法 |
| US7824519B2 (en) * | 2007-05-18 | 2010-11-02 | Lam Research Corporation | Variable volume plasma processing chamber and associated methods |
| US8349196B2 (en) * | 2007-12-06 | 2013-01-08 | Intevac, Inc. | System and method for commercial fabrication of patterned media |
| TWI516175B (zh) * | 2008-02-08 | 2016-01-01 | 蘭姆研究公司 | 在電漿處理腔室中穩定壓力的方法及其程式儲存媒體 |
| TWI475592B (zh) | 2008-07-07 | 2015-03-01 | Lam Res Corp | 用來偵測電漿處理腔室中之電漿不穩定性的被動電容耦合靜電探針裝置 |
| US8206506B2 (en) * | 2008-07-07 | 2012-06-26 | Lam Research Corporation | Showerhead electrode |
| US8161906B2 (en) * | 2008-07-07 | 2012-04-24 | Lam Research Corporation | Clamped showerhead electrode assembly |
| US8221582B2 (en) | 2008-07-07 | 2012-07-17 | Lam Research Corporation | Clamped monolithic showerhead electrode |
| WO2010005932A2 (en) * | 2008-07-07 | 2010-01-14 | Lam Research Corporation | Plasma-facing probe arrangement including vacuum gap for use in a plasma processing chamber |
| US8540844B2 (en) * | 2008-12-19 | 2013-09-24 | Lam Research Corporation | Plasma confinement structures in plasma processing systems |
| JP2012514703A (ja) * | 2008-12-31 | 2012-06-28 | エフ. ヒメネス、オマール | フレキシャ部材を組み入れた可撓性ジョイント構成 |
| US8628577B1 (en) | 2009-03-19 | 2014-01-14 | Ex Technology, Llc | Stable device for intervertebral distraction and fusion |
| US8402918B2 (en) * | 2009-04-07 | 2013-03-26 | Lam Research Corporation | Showerhead electrode with centering feature |
| US8272346B2 (en) | 2009-04-10 | 2012-09-25 | Lam Research Corporation | Gasket with positioning feature for clamped monolithic showerhead electrode |
| IN2012DN00952A (ja) | 2009-07-22 | 2015-04-10 | Spinex Tec Llc | |
| KR20170125419A (ko) * | 2009-08-31 | 2017-11-14 | 램 리써치 코포레이션 | 무선 주파수 (rf) 접지 복귀 장치들 |
| US8992722B2 (en) * | 2009-09-01 | 2015-03-31 | Lam Research Corporation | Direct drive arrangement to control confinement rings positioning and methods thereof |
| SG169960A1 (en) * | 2009-09-18 | 2011-04-29 | Lam Res Corp | Clamped monolithic showerhead electrode |
| WO2011038344A2 (en) * | 2009-09-28 | 2011-03-31 | Lam Research Corporation | Unitized confinement ring arrangements and methods thereof |
| JP3160877U (ja) * | 2009-10-13 | 2010-07-15 | ラム リサーチ コーポレーションLam Research Corporation | シャワーヘッド電極アセンブリの端部クランプ留めおよび機械固定される内側電極 |
| US8636746B2 (en) | 2009-12-31 | 2014-01-28 | Spinex Tec, Llc | Methods and apparatus for insertion of vertebral body distraction and fusion devices |
| US9184028B2 (en) * | 2010-08-04 | 2015-11-10 | Lam Research Corporation | Dual plasma volume processing apparatus for neutral/ion flux control |
| US20130059448A1 (en) * | 2011-09-07 | 2013-03-07 | Lam Research Corporation | Pulsed Plasma Chamber in Dual Chamber Configuration |
| US8573152B2 (en) | 2010-09-03 | 2013-11-05 | Lam Research Corporation | Showerhead electrode |
| CN102595764A (zh) * | 2012-03-13 | 2012-07-18 | 苏州爱因智能设备有限公司 | 用于电子直线加速器的自动频率控制驱动装置 |
| US8895452B2 (en) | 2012-05-31 | 2014-11-25 | Lam Research Corporation | Substrate support providing gap height and planarization adjustment in plasma processing chamber |
| JP5985338B2 (ja) * | 2012-09-28 | 2016-09-06 | 小島プレス工業株式会社 | プラズマcvd装置 |
| JP5992288B2 (ja) * | 2012-10-15 | 2016-09-14 | 東京エレクトロン株式会社 | ガス導入装置及び誘導結合プラズマ処理装置 |
| TWI627305B (zh) * | 2013-03-15 | 2018-06-21 | Applied Materials, Inc. | 用於轉盤處理室之具有剛性板的大氣蓋 |
| US8940049B1 (en) | 2014-04-01 | 2015-01-27 | Ex Technology, Llc | Expandable intervertebral cage |
| US9486328B2 (en) | 2014-04-01 | 2016-11-08 | Ex Technology, Llc | Expandable intervertebral cage |
| CN104900473B (zh) * | 2015-04-24 | 2017-04-05 | 北京精诚铂阳光电设备有限公司 | 平行度调节装置及cvd生长膜装置 |
| US10533251B2 (en) * | 2015-12-31 | 2020-01-14 | Lam Research Corporation | Actuator to dynamically adjust showerhead tilt in a semiconductor processing apparatus |
| KR101680850B1 (ko) * | 2016-06-28 | 2016-11-29 | 주식회사 기가레인 | 배기유로의 크기가 조절되는 플라즈마 처리 장치 |
| US9899193B1 (en) * | 2016-11-02 | 2018-02-20 | Varian Semiconductor Equipment Associates, Inc. | RF ion source with dynamic volume control |
| CN107339791A (zh) * | 2017-07-25 | 2017-11-10 | 广东美的制冷设备有限公司 | 百叶驱动装置、空调器的百叶组件和空调器 |
| US11670490B2 (en) * | 2017-09-29 | 2023-06-06 | Taiwan Semiconductor Manufacturing Co., Ltd. | Integrated circuit fabrication system with adjustable gas injector |
| CN111586957B (zh) * | 2019-02-19 | 2021-05-04 | 大连理工大学 | 一种容性耦合等离子体放电装置 |
| US11234835B2 (en) | 2019-03-05 | 2022-02-01 | Octagon Spine Llc | Transversely expandable minimally invasive intervertebral cage |
| US11497622B2 (en) | 2019-03-05 | 2022-11-15 | Ex Technology, Llc | Transversely expandable minimally invasive intervertebral cage and insertion and extraction device |
| CN111863578B (zh) * | 2019-04-28 | 2023-06-16 | 中微半导体设备(上海)股份有限公司 | 一种等离子体处理设备 |
| CN114008242B (zh) * | 2019-06-21 | 2024-12-13 | 朗姆研究公司 | 双向转位装置 |
| CN112309807B (zh) * | 2019-08-02 | 2022-12-30 | 中微半导体设备(上海)股份有限公司 | 等离子体刻蚀设备 |
| CN113035680B (zh) * | 2019-12-24 | 2024-06-14 | 中微半导体设备(上海)股份有限公司 | 用于真空设备的调平机构和等离子体处理装置 |
| KR20230088869A (ko) * | 2020-10-23 | 2023-06-20 | 램 리써치 코포레이션 | 플라즈마 에칭 반응기 내로 증기 증착 프로세스의 통합 |
| KR102593140B1 (ko) * | 2020-12-18 | 2023-10-25 | 세메스 주식회사 | 지지 유닛 및 기판 처리 장치 |
| WO2022164447A1 (en) * | 2021-01-29 | 2022-08-04 | Applied Materials, Inc. | Cathode drive unit, deposition system, method of operating a deposition system and method of manufacturing a coated substrate |
| US12097126B2 (en) | 2021-09-29 | 2024-09-24 | Ex Technology, Llc | Expandable intervertebral cage |
| US12119209B2 (en) * | 2021-10-11 | 2024-10-15 | Applied Materials, Inc. | Dynamic processing chamber baffle |
| US20230113063A1 (en) * | 2021-10-11 | 2023-04-13 | Applied Materials, Inc. | Dynamic processing chamber baffle |
| US12011365B2 (en) | 2022-07-18 | 2024-06-18 | Octagon Spine Llc | Transversely expandable minimally invasive inter vertebral cage |
| KR20250014860A (ko) * | 2023-07-21 | 2025-02-03 | 세메스 주식회사 | 샤워헤드 어셈블리를 포함하는 기판 처리 장치 |
| CN119650392B (zh) * | 2023-09-15 | 2026-04-17 | 北京北方华创微电子装备有限公司 | 上电极组件及半导体工艺设备 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62158342A (ja) * | 1986-01-06 | 1987-07-14 | Oki Electric Ind Co Ltd | 基板上下装置 |
| JPS63193527A (ja) * | 1987-02-06 | 1988-08-10 | Mitsubishi Electric Corp | エツチング装置 |
| JPH03203317A (ja) * | 1989-12-29 | 1991-09-05 | Matsushita Electric Ind Co Ltd | プラズマ処理装置 |
| JPH0786252A (ja) * | 1993-09-20 | 1995-03-31 | Fujitsu Ltd | ドライエッチング装置とドライエッチング方法 |
| JPH0927396A (ja) * | 1995-07-10 | 1997-01-28 | Lam Res Corp | プラズマ閉じ込めを使用するプラズマエッチング装置 |
| JPH11162957A (ja) * | 1997-11-28 | 1999-06-18 | Nec Corp | プラズマcvd装置とそのドライクリーニング方法 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5729577A (en) | 1980-07-30 | 1982-02-17 | Anelva Corp | Automatic continuous sputtering apparatus |
| US4478701A (en) * | 1983-12-30 | 1984-10-23 | Rca Corporation | Target support adjusting fixture |
| JPS61291032A (ja) | 1985-06-17 | 1986-12-20 | Fujitsu Ltd | 真空装置 |
| CN1008932B (zh) * | 1985-11-08 | 1990-07-25 | 冶金工业部北京钢铁设计研究总院 | 数字式脉冲阀系统 |
| US4851095A (en) * | 1988-02-08 | 1989-07-25 | Optical Coating Laboratory, Inc. | Magnetron sputtering apparatus and process |
| US4944860A (en) * | 1988-11-04 | 1990-07-31 | Eaton Corporation | Platen assembly for a vacuum processing system |
| JPH07110991B2 (ja) * | 1989-10-02 | 1995-11-29 | 株式会社日立製作所 | プラズマ処理装置およびプラズマ処理方法 |
| CN2068025U (zh) * | 1990-04-30 | 1990-12-26 | 彭建国 | 多功能汽车半轴套管拉压机 |
| US5284561A (en) * | 1991-11-13 | 1994-02-08 | Materials Research Corporation | Method and apparatus for sputter coating employing machine readable indicia carried by target assembly |
| US5178739A (en) * | 1990-10-31 | 1993-01-12 | International Business Machines Corporation | Apparatus for depositing material into high aspect ratio holes |
| WO1994021839A1 (fr) * | 1993-03-15 | 1994-09-29 | Kabushiki Kaisha Kobeseikosho | Appareil et systeme de placage ionique a l'arc |
| US5354413A (en) | 1993-03-18 | 1994-10-11 | Advanced Micro Devices, Inc. | Electrode position controller for a semiconductor etching device |
| US5552124A (en) | 1994-06-22 | 1996-09-03 | Applied Materials, Inc. | Stationary focus ring for plasma reactor |
| US5672882A (en) | 1995-12-29 | 1997-09-30 | Advanced Micro Devices, Inc. | Ion implantation device with a closed-loop process chamber pressure control system |
| US5961798A (en) * | 1996-02-13 | 1999-10-05 | Diamond Black Technologies, Inc. | System and method for vacuum coating of articles having precise and reproducible positioning of articles |
| US5889248A (en) * | 1997-09-08 | 1999-03-30 | Abb Power T&D Company Inc. | Operating mechanism for combined interrupter disconnect switch |
| US6019060A (en) | 1998-06-24 | 2000-02-01 | Lam Research Corporation | Cam-based arrangement for positioning confinement rings in a plasma processing chamber |
| US6350317B1 (en) * | 1999-12-30 | 2002-02-26 | Lam Research Corporation | Linear drive system for use in a plasma processing system |
-
1999
- 1999-12-30 US US09/474,843 patent/US6350317B1/en not_active Expired - Lifetime
-
2001
- 2001-01-02 CN CNB018058981A patent/CN100392792C/zh not_active Expired - Fee Related
- 2001-01-02 EP EP01939994A patent/EP1243017B1/en not_active Expired - Lifetime
- 2001-01-02 IL IL15025401A patent/IL150254A0/xx not_active IP Right Cessation
- 2001-01-02 KR KR1020027008132A patent/KR100751748B1/ko not_active Expired - Fee Related
- 2001-01-02 JP JP2001550778A patent/JP4991069B2/ja not_active Expired - Lifetime
- 2001-01-02 DE DE60127232T patent/DE60127232T2/de not_active Expired - Lifetime
- 2001-01-02 WO PCT/US2001/000057 patent/WO2001050498A1/en not_active Ceased
- 2001-01-02 AU AU29257/01A patent/AU2925701A/en not_active Abandoned
- 2001-11-05 US US10/012,265 patent/US6669811B2/en not_active Expired - Lifetime
-
2003
- 2003-11-05 US US10/702,682 patent/US6863784B2/en not_active Expired - Lifetime
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62158342A (ja) * | 1986-01-06 | 1987-07-14 | Oki Electric Ind Co Ltd | 基板上下装置 |
| JPS63193527A (ja) * | 1987-02-06 | 1988-08-10 | Mitsubishi Electric Corp | エツチング装置 |
| JPH03203317A (ja) * | 1989-12-29 | 1991-09-05 | Matsushita Electric Ind Co Ltd | プラズマ処理装置 |
| JPH0786252A (ja) * | 1993-09-20 | 1995-03-31 | Fujitsu Ltd | ドライエッチング装置とドライエッチング方法 |
| JPH0927396A (ja) * | 1995-07-10 | 1997-01-28 | Lam Res Corp | プラズマ閉じ込めを使用するプラズマエッチング装置 |
| JPH11162957A (ja) * | 1997-11-28 | 1999-06-18 | Nec Corp | プラズマcvd装置とそのドライクリーニング方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2925701A (en) | 2001-07-16 |
| CN100392792C (zh) | 2008-06-04 |
| DE60127232T2 (de) | 2007-11-15 |
| WO2001050498A1 (en) | 2001-07-12 |
| US6669811B2 (en) | 2003-12-30 |
| JP2003519908A (ja) | 2003-06-24 |
| EP1243017B1 (en) | 2007-03-14 |
| KR20020063599A (ko) | 2002-08-03 |
| US20040108301A1 (en) | 2004-06-10 |
| US20020100555A1 (en) | 2002-08-01 |
| US6350317B1 (en) | 2002-02-26 |
| IL150254A0 (en) | 2002-12-01 |
| US6863784B2 (en) | 2005-03-08 |
| CN1429398A (zh) | 2003-07-09 |
| KR100751748B1 (ko) | 2007-08-27 |
| WO2001050498A9 (en) | 2002-12-05 |
| DE60127232D1 (de) | 2007-04-26 |
| EP1243017A1 (en) | 2002-09-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4991069B2 (ja) | プラズマ処理システムで用いられる直線駆動システム | |
| US11804366B2 (en) | Plasma processing apparatus | |
| US8133360B2 (en) | Prediction and compensation of erosion in a magnetron sputtering target | |
| JP5138700B2 (ja) | 容量結合プラズマプロセスチャンバにおけるガスフローコンダクタンス制御のための装置および方法 | |
| US20040082251A1 (en) | Apparatus for adjustable gas distribution for semiconductor substrate processing | |
| WO2011143062A2 (en) | Confined process volume pecvd chamber | |
| KR20010082162A (ko) | 플라즈마 처리 장치 및 플라즈마 처리 방법 | |
| US11623253B2 (en) | In-situ DC plasma for cleaning pedestal heater | |
| TWI753223B (zh) | 具有電漿脈衝以防止電荷損傷的基板處理腔室及方法 | |
| KR20140057208A (ko) | 조합식 및 풀 기판 스퍼터 증착 도구 및 방법 | |
| US11719255B2 (en) | Pumping liner for improved flow uniformity | |
| US11823939B2 (en) | Apparatus and methods for processing chamber lid concentricity alignment | |
| JP2010536172A (ja) | 電子デバイス製造処理部品を現場外シーズニングするための方法及び装置 | |
| TW202607781A (zh) | 絕緣環、下部電極單元及基板處理設備 | |
| KR20000026750A (ko) | 스퍼터링 장치 | |
| KR20070008138A (ko) | 반도체 디바이스 제조를 위한 식각 장비의 갭 조절장치 및이를 이용한 갭 조절방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071211 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080815 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081201 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101207 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110304 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110311 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110607 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110906 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20111212 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120305 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120424 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120507 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4991069 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150511 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |