JP4987481B2 - 位置情報の決定 - Google Patents
位置情報の決定 Download PDFInfo
- Publication number
- JP4987481B2 JP4987481B2 JP2006538922A JP2006538922A JP4987481B2 JP 4987481 B2 JP4987481 B2 JP 4987481B2 JP 2006538922 A JP2006538922 A JP 2006538922A JP 2006538922 A JP2006538922 A JP 2006538922A JP 4987481 B2 JP4987481 B2 JP 4987481B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- receiving
- transmitter
- frequency
- pulse
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 claims description 146
- 238000001514 detection method Methods 0.000 claims description 130
- 238000012545 processing Methods 0.000 claims description 81
- 238000004891 communication Methods 0.000 claims description 55
- 230000004044 response Effects 0.000 claims description 49
- 239000000523 sample Substances 0.000 claims description 49
- 230000008569 process Effects 0.000 claims description 44
- 238000006073 displacement reaction Methods 0.000 claims description 22
- 239000000758 substrate Substances 0.000 claims description 15
- 238000000926 separation method Methods 0.000 claims description 7
- 230000001419 dependent effect Effects 0.000 claims 1
- 230000006870 function Effects 0.000 description 58
- 230000005540 biological transmission Effects 0.000 description 48
- 238000005070 sampling Methods 0.000 description 48
- 238000010586 diagram Methods 0.000 description 39
- 238000005259 measurement Methods 0.000 description 30
- 238000001208 nuclear magnetic resonance pulse sequence Methods 0.000 description 23
- 101001093748 Homo sapiens Phosphatidylinositol N-acetylglucosaminyltransferase subunit P Proteins 0.000 description 21
- 238000004422 calculation algorithm Methods 0.000 description 18
- 230000008859 change Effects 0.000 description 15
- 230000005855 radiation Effects 0.000 description 11
- 230000001360 synchronised effect Effects 0.000 description 11
- 238000001914 filtration Methods 0.000 description 10
- 230000000694 effects Effects 0.000 description 8
- 238000004364 calculation method Methods 0.000 description 7
- 238000004590 computer program Methods 0.000 description 7
- 230000033001 locomotion Effects 0.000 description 6
- 238000007726 management method Methods 0.000 description 6
- 230000007423 decrease Effects 0.000 description 5
- 230000001976 improved effect Effects 0.000 description 5
- 238000007781 pre-processing Methods 0.000 description 5
- 230000001960 triggered effect Effects 0.000 description 5
- 230000006399 behavior Effects 0.000 description 4
- 230000008901 benefit Effects 0.000 description 4
- 238000013461 design Methods 0.000 description 4
- 235000013305 food Nutrition 0.000 description 4
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 4
- 230000004807 localization Effects 0.000 description 4
- 101000987581 Homo sapiens Perforin-1 Proteins 0.000 description 3
- 102100028467 Perforin-1 Human genes 0.000 description 3
- 230000002159 abnormal effect Effects 0.000 description 3
- 230000002547 anomalous effect Effects 0.000 description 3
- 239000003795 chemical substances by application Substances 0.000 description 3
- 239000013078 crystal Substances 0.000 description 3
- 238000013480 data collection Methods 0.000 description 3
- 230000001934 delay Effects 0.000 description 3
- 230000003111 delayed effect Effects 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 238000001228 spectrum Methods 0.000 description 3
- 101100137546 Arabidopsis thaliana PRF2 gene Proteins 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 2
- 101100191501 Zea mays PRO2 gene Proteins 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 238000011835 investigation Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000010606 normalization Methods 0.000 description 2
- 230000035515 penetration Effects 0.000 description 2
- 230000010363 phase shift Effects 0.000 description 2
- 230000001902 propagating effect Effects 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 238000007493 shaping process Methods 0.000 description 2
- 230000003595 spectral effect Effects 0.000 description 2
- 239000000654 additive Substances 0.000 description 1
- 230000000996 additive effect Effects 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 230000033228 biological regulation Effects 0.000 description 1
- 230000036772 blood pressure Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000000593 degrading effect Effects 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000012805 post-processing Methods 0.000 description 1
- 230000000750 progressive effect Effects 0.000 description 1
- 238000012887 quadratic function Methods 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000010076 replication Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 238000011895 specific detection Methods 0.000 description 1
- 238000010408 sweeping Methods 0.000 description 1
- 230000007474 system interaction Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images


























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/04—Position of source determined by a plurality of spaced direction-finders
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/0209—Systems with very large relative bandwidth, i.e. larger than 10 %, e.g. baseband, pulse, carrier-free, ultrawideband
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/87—Combinations of radar systems, e.g. primary radar and secondary radar
- G01S13/878—Combination of several spaced transmitters or receivers of known location for determining the position of a transponder or a reflector
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/74—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems
- G01S13/76—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems wherein pulse-type signals are transmitted
- G01S13/765—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems wherein pulse-type signals are transmitted with exchange of information between interrogator and responder
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/887—Radar or analogous systems specially adapted for specific applications for detection of concealed objects, e.g. contraband or weapons
- G01S13/888—Radar or analogous systems specially adapted for specific applications for detection of concealed objects, e.g. contraband or weapons through wall detection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9329—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles cooperating with reflectors or transponders
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar Systems Or Details Thereof (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Description
「能動」送信機タグを追跡するための、知られている従来技術のシステムが、「Ultra−wideband precision asset location system」(IEEE Conference on Ultra Wideband Systems and Technologies、2002年5月)と題する論文で公開されている。このシステムでは、船内の貨物室の広く間隔の空いた隅部の場所に配置された複数の受信アンテナを使用して、貨物室内の貨物に取り付けられた送信機タグから放射される超広帯域信号を検出する。円弧近似技法では、受信アンテナの中央コンピュータとの同期を利用し、各アンテナにおける識別パルスの到着時間の知識を使用し、3次元での物体の位置を確定する。
組み込まれた送信機によって送信される信号パルスを受信するための手段であって、受信するための前記手段が、単一のハウジング内に、または共通の基板上に配置され、前記信号パルスが好ましくは超広帯域信号パルスである手段と、
受信手段に結合され、物体の角位置をそこから決定することができる出力を生成するための検出手段とを含み、
受信するための手段が複数の受信エレメントを含み、検出手段が、複数の受信エレメントで受信された信号パルスの相対タイミングを検出し、それによって角位置を決定することができるように適合される機器が提供される。
この機器は、UWBパルスを非同期的に(すなわち、同時送受信制御の下ではなく)送信することができる。到達距離は短いことがあり、一般に50メートル未満、通常、10メートル未満である。精度は、15cm未満とすることができる。好ましくは、複数のタグを同時に扱うことができる。別々の基地局を使用して、正確な位置を決定することができる。
複数の受信エレメントは、好ましくは、電磁アンテナアレイの形であり、好ましくは、非共線的に配置される3つ(以上)の受信エレメントを含む。例えば、受信エレメントは、直角三角形の軌跡の(すなわち、L形パターンにおける)ほぼ頂点に配置することができる。また、完全に共線的な配置も可能である。
好ましくは、この機器は、検出手段の出力を処理して、物体に関する位置情報を決定するための処理手段をさらに含む。さらに、処理手段は、検出手段の出力を追加の角位置と共に処理し、その結果、物体に関連する送信機の変位を決定するように適合させることができる。
好ましくは、区別手段は、組み込まれた送信機によって送信される信号の検出を駆動するように動作可能な検出クロックと、選択された信号周波数に応じて検出クロックを設定し、それによって、選択された信号周波数を有する信号が機器によって優先的に検出されるための手段とを含む。
あるいは、またはさらに、信号は、時分割多重化することができる。好ましくは、従来のTDMAのアルゴリズム、規格、およびチップセットが使用される。FDMAおよびCDMAの規格およびチップセットを使用することもできる。有利には、変調技法の使用と周波数偏移を組み合わせて、大きな範囲の一意で識別可能な物体の「シグニチャー」を作成することができる。
一実施形態においては、間隔を決定する手段は、少なくとも1対の受信エレメントで受信される信号を相互相関させ、相互相関結果に応じて間隔を決定するように動作する。好ましくは、相互相関方法は、打切り相互相関プロセスであり、それによって、例えば、受信エレメント間の最大信号遅延の知識を使用して、相互相関計算の範囲を制限する。打切り相互相関は、国際公開第01/59473号で教示されている。
好ましくは、処理手段によって適用されるプロセスは、信号の特性、または予想される特性に依存する。好ましくは、特性、または予想される特性は、周波数、位相、帯域幅、およびパルス幅のうちの少なくとも1つである。
好ましくは、処理手段の動作は、複数の受信エレメントによって受信された信号の間の間隔を検出するように整合フィルタを適用し、それによって物体の角位置を決定することを含む。
好ましくは、受信手段および検出手段は、その周波数の5%、10%、または20%よりも大きい帯域幅を有する信号を受信し検出するように適合される。
好ましくは、信号はパルス信号である。
好ましくは、各パルス信号は、2nsより長い、好ましくは5ns、10ns、20ns、および50nsのうちの少なくとも1つよりも長いパルス長を有する。
好ましくは、その物体または各物体は、送信機を組み込んだ物体を含むまたは備える。
好ましくは、信号は、物体と関連した送信機によって送信される信号である。
(少なくとも)いずれの整合フィルタ態様においても、好ましくは、受信手段および検出手段は、その周波数の5%、10%、20%、30%、または40%よりも大きい帯域幅を有する信号を受信し検出するように適合される。あるいは、受信手段および検出手段は、その周波数の5%未満の帯域幅を有する信号を受信し検出するように適合させることもできる。好ましくは、整合フィルタは、パルスの持続時間よりもかなり小さい、受信パルスの一部分に整合するように適合され、整合部分はほぼシヌソイドである。
この特徴は、物体に関する位置情報を決定するための機器であって、信号パルスを受信するための手段であって、前記信号パルスが好ましくは超広帯域信号パルスである手段と、受信手段に結合され、物体の角位置をそこから決定することができる出力を生成するための検出手段と、物体に向けてプローブ信号を送信するための手段とを含み、前記受信手段および前記送信手段が、単一のハウジング内に、または共通の基板上に配置され、前記信号パルスが、物体からのプローブ信号の反射および物体に関連した送信機によって送信される信号のうちの1つである機器の形で、独立に提供することもできる。
好ましくは、送信信号を生成するのに使用されない、検出手段と結合された受信機クロックをさらに含む。
本発明の他の態様においては、上記の機器を含む車両が提供される。
本発明の他の態様においては、物体に関する位置情報を決定する方法であって、信号を生成すること、物体から受信機器に信号を送信すること、受信機器で信号を検出すること、および受信機器に相対的な物体の角位置をそこから決定することができる出力を生成することを含む方法が提供される。
この方法は、好ましくは、受信パルス列をサンプリングすること、および特性パルス周波数に関する特性サンプリング周波数を有する出力を生成することをさらに含む。出力サンプリング周波数は、特性パルス周波数よりも低くすることができる。出力サンプリング周波数は、5kHz〜100kHz、好ましくは25kHz〜90kHz、およびより好ましくは60kHz〜85kHzでよい。
本発明の関係する一態様においては、物体に関する位置情報を決定する方法であって、物体に関連する送信機を含む複数の送信機によって送信される複数の信号を受信すること、識別情報に応じて物体において送信される信号と任意の追加の受信信号とを区別すること、および区別された信号に応じて物体の角位置を決定し、それによって物体に関する位置情報を決定することができることを含む方法が提供される。
本発明の関係する一態様においては、物体に関する位置情報を決定する方法であって、物体で送信された信号を受信機器で検出すること、受信信号を表す出力信号を生成すること、および受信機器を同じ機器で較正することを含む方法が提供される。この方法は、好ましくは、基準送信機から信号を受信すること、および受信基準信号を表す信号を出力することをさらに含む。この方法は、物体において送信される信号の到着時間と基準送信機において送信される信号の到着時間との間のタイミング差を表す信号を出力することをさらに含むことができる。
この方法は、区別入力に応じて生成信号の固有特性を変化させることをさらに含むことができる。固有特性は、上記のとおりとすることができる。この方法は、信号を時分割多重化することをさらに含むことができる。信号帯域は、上記のとおりとすることができる。
本発明の関係する一態様においては、特性パルス周波数を有するパルス列を含む信号であって、特性パルス周波数が、2MHz〜20MHz、好ましくは5MHz〜15MHz、およびより好ましくは10.5MHz〜13.5MHzであり、パルスが、0.5GHz〜24GHz、好ましくは2GHz〜12GHz、およびより好ましくは5.8GHz〜7.2GHzの特性周波数を有する信号が提供される。
本発明の他の態様によれば、物体に関する位置情報を決定するためのシステムにおいて使用するための機器であって、システムの受信機によって検出されるパルスシーケンスを送信するための送信機を含み、送信機が、パルスシーケンスの特性を変化させてデータを受信機に送信するように適合される機器が提供される。
好ましくは、パルスシーケンスの特性を変化させる速度は、パルス周波数よりも大幅に低い。このようにして、メッセージのデータ速度は、システム自体の無線周波数よりもはるかに低くすることができる。
データ送信は、好ましくは、PRF変調によって行われる。これは、例えば、複数の送信機を区別するために使用することができる。各送信機は、この方法により、送信機を識別する情報を含む情報を送信することができる。この機構は、一般に、送信機と受信機システムの間でデータを送信するために使用することができる。
好ましくは、データを含むパルスシーケンスは、位置情報を決定するためにも使用される。
この機器は、送信機と受信機の間で通信を行うための手段をさらに含むことができる。例えば、この機器は、追加の通信を行うために、例えば送信機システムまたは受信機システムにおいて、別個の無線送信機を含むことができる。
例えば、位置決定で使用される信号を伝送する場合と、伝達情報を伝送する場合とで伝送周波数が類似または同じである場合、ほぼ同じコンポーネントをどちらの伝送にも使用することができる。これには、システムのサイズと複雑さを大幅に低減させる潜在的な利点がある。
本発明によれば、物体に関する位置情報を決定するためのシステムで使用される機器であって、物体の位置を決定するのに使用される信号を受信するための受信機を含み、かつ送信機から伝達情報を受信するための受信機をさらに含み、信号を受信するための受信機のコンポーネントが、伝達情報を受信するための受信機と共通である機器が提供される。
好ましくは、信号は、好ましくは、場合によってはパルス繰返し周波数変調によって信号を符号化または変調した、好ましくは物体の、識別子を含む。好ましくは、識別子はMACアドレスである。
本明細書に記載の技法は、受信機と送信機装置を含めた物体の間の距離がそれほど大きくない場合に、特に有用である。好ましくは、距離は、50m未満、好ましくは20m未満である。
送信機および/または受信機は、車両に搭載することができる。
例えば、物体が車両であり、車両に送信機が搭載されている場合、送信機は、車両に関する情報、例えば駆動性能、または例えば急ブレーキをかけているとの情報を送信することができる。この情報を、例えばその情報を送信する車両に近い他の車両で使用して、駆動方針、例えばブレーキ方針または事故回避方針を決定することができる。
本発明の上記のありとあらゆる態様において、例えば位置情報を決定するための、識別子を伝送するための、および通信するための、いくつかまたはすべての伝送は、超広帯域でよい。
本発明のさらに他の態様においては、上記のコンピュータプログラム製品を有形に実施する信号が提供される。
本発明の1つの態様における任意の特徴は、任意の適切な組合せで、本発明の他の態様に適用することができる。具体的には、方法の態様は、機器の態様に適用することができ、その逆も同様である。
その後、システムコンポーネントの相対タイミングに関する情報、受信ユニットの較正、および送信信号のチャネル化を含めた、位置決めシステムの設計の根底となる原則について説明する。
位置決めシステムの構成
図1は、位置決めシステムの第1の実施形態の概要図である。図1を参照すると、位置決めシステム100は、位置決定すべき物体102、物体102と関連しまたはそれに含まれ、信号106を出力する送信機104、および1対の受信機器200、202、および制御ユニット300を含む。受信機器200、202は、データリンク302、304によって制御ユニット300に接続されている。より詳細に後で論じるように、このシステムの諸変形形態は受動モードで動作させることができ、その場合、送信機は物体から離れて配置され、受信機で受信される信号は、送信された信号の物体からの反射である。
再び図1を参照すると、受信ユニット200、202を制御ユニット300に接続するデータリンク302、304は、電線である。第1の実施形態の一変形形態においては、データリンク302、304は、受信ユニット200、202と制御ユニット300の間の無線リンクによって構成されるが、他の組合せも、もちろん可能である。
能動物体の説明
図6は、位置決めシステムにおける能動物体の概要図である。図6では、物体102は、信号発生ユニット120に結合された送信機ユニット104を含み、これらのユニットが一緒に信号106を生成する。
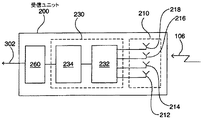
図8は、位置決めシステムにおける受信ユニットの概要図である。図8では、受信ユニット200は、送信信号106を受信するための受信機コンポーネント210、信号106を検出するための、受信機コンポーネントに結合された検出器コンポーネント230、および信号を処理し、処理結果をデータリンク302を介して制御ユニット300(図示せず)に出力するための受信機側処理ユニット260を含んでいる。
制御ユニットの説明
図11は、位置決めシステムにおける制御ユニットの略図である。図11では、入出力インターフェース320が、データリンク302、304を介して2つの受信ユニット(図示せず)に接続されている。入出力インターフェース320は、コンピュータ330に結合されている。
位置決めシステムの設計の根底をなす原理
このシステムは、能動物体(すなわち「タグ」)の最大検出距離が10mであるように設計されている。(30m以上など)より長い検出距離も可能であるが、より高い出力およびより複雑さが必要となり得るので、コストが増大し複雑化するという犠牲を伴う。
図12は、位置決めシステムにおける受信ユニットのための例示的なタイミングを示すタイミング図である。図12では、送信パルス400、対応する受信パルス410、および受信機PRFクロックパルス420が、時間に対して描画されている。送信パルス402、404、406は、PRP430だけ隔てられている。受信パルス412、414、416は、送信パルス402、404、406に対して、時間オフセット432で受信される。可能性のある到達距離のあいまいさ434も示されている。下方の描画は、受信機の走査を開始するのに使用される受信機PRFクロックの出力を示す。送信機PRFクロックと受信機PRFクロックの間が非同期の関係であるので、受信機PRFクロックは、送信機クロックに対して任意の時間オフセット436をもつ。PRFクロックパルス422、424、426が送信され、同じパルス412、414、416が受信される間に、時間オフセット438が経過する。
タグの周波数精度(すなわち、受信機クロックと送信機クロックの間の整合の近さ)により、とりわけ、良好な信号対雑音比(SN比)を得るために所与の帯域幅信号に必要とされる処理量が決まる。SN比が高いと、精度が高まり、システムの検出距離が増大する可能性があり、一方、SN比が低いと、システムに累進的な誤差を生じさせる可能性がある。
受信ユニットの較正
上記の距離エラーは、システムの複数の受信ユニットによって出力されるデータに現在存在する情報から、送信機および受信機のクロック位相差を決定し、次に、得られた位相差について訂正することによって、補償することができる。
次に、送信信号のチャネル化についてより詳細に説明する。
好ましい実施形態においては、タグ識別(すなわち、特定の物体に関連する送信機によって送信される信号の識別)は、各物体に互いに異なるパルス繰返し周波数(PRF)で信号を送信させることによって実現する。次に、受信ユニットを、制御ユニットの制御の下、タイムベース回路により、任意選択で共通クロック信号(上記参照)によって、該当するPRFに「同調」させる。
信号の処理
上記のように、各受信ユニット200ごとの受信機側処理ユニット260(または、上記の変形形態においては、制御ユニット300自体)は、その入力として、各受信機チャネルに対応する(受信機ユニットのセンサアレイにおいて1アンテナごとに1つの)、サンプリングされ、フィルタリングされ、時間伸張された複数の信号をとる。受信機側処理ユニット260への各信号入力は、所望のタグ信号に対応する狭帯域の周波数を含んでいる。次に、処理を完了できるようにするために、各受信ユニット200、202(等々)によって制御ユニット300に情報が渡される。
計算効率を高めるため、レーダデータは、同相(I)成分および直交(Q)成分に分割され、複素数の対にデインターリーブされる。これにより、到達距離掃引時間を低減することができる。
整合フィルタ
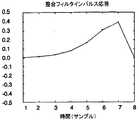
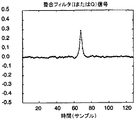
検出アルゴリズムの別の部分では、整合フィルタを使用して、パルス波形の検出を機能拡張する。所与の入力x[n]に対する整合フィルタの出力y[n]は以下で与えられる。

インパルス応答h[n]を、予想される信号波形(すなわち、通常なら整合フィルタ原型として知られる、送信機によって送信される個々のパルスの形)の反転として設定することにより、フィルタの出力が入力信号を予想される信号波形と相互相関させたものに等しいことを示すことができる。これにより、計算的に効率的な受信パルス波形の検出方法が得られ、これを前処理方法として用いると、処理される信号の信号対雑音比が向上する。
能動モードでは、互いに異なるタグ送信機が、異なる特性をもつパルスを送信する場合、互いに異なる整合フィルタ原型は、異なるタグに対応する。
例示の目的で、受信パルスがIチャネルおよびQチャネルに位相が一定(例えば、周波数オフセットがゼロ)で現れるように、IQ信号がまずベースバンド化されると仮定する。次に、整合フィルタリングがIおよびQに並列に適用される。
差動タイミングセンサアレイの構成
図16は、受信ユニットにおけるセンサアレイの平面図である。図16では、アレイ基板270は、基板上に形成された4つのアンテナ272、274、276、278を含んでいる。角位置を測定するとき、より非対称な構成であるほど、あいまいさが生じる可能性が減少することに留意して、アンテナ272、274、276、278は、アレイ基板270の平面において非長方形の四辺形の形で構成されているが、それとは異なる構成も可能である。
物体がアレイ270の軸(「ボアサイト」と呼ばれることもある)上に配置されている場合、4つのアンテナ272、274、276、278のいずれからも等距離であり、その結果、4つのアンテナ272、274、276、278のいずれからも同時に到着する。
Tr1=(2R5+(−D14sin(θ)+D12sin(φ))/2)/c
Tr2=(2R5+(−D23sin(θ)−D12sin(φ))/2)/c
Tr3=(2R5+(D23sin(θ)−D34sin(φ))/2)/c
Tr4=(2R5+(D14sin(θ)+D34sin(φ))/2)/c
ここで、Dxyは、互いに異なるセンサxおよびセンサyの間の距離であり、R5は、送信機(図示せず)とセンサアレイ270の間の距離であり、これらの計算式は、小さな角度に対する近似である。(送信機と受信ユニットの非同期性により容易に得ることのできないR5がわからなくても)上記の計算式を解いて、角度θおよびφを得ることができる。
システムは、能動および受動の2つのモードのうちの1つのモードで動作するように設計されている。能動モードでは、システムは能動物体(タグ)から送信される信号がないかどうか走査し、最低2つのセンサを使用してタグの位置を決定する。受動モードでは、これは能動モードと同時に動作可能であるが、システムは、異常な受動物体、すなわちそれらに関連した能動送信機を有さない未知の物体がないかどうか走査する。好ましい実施形態の諸変形形態においては、システムは受動モードでのみ動作する。
通常、デジタルベースバンド変換プロセスとそれに続く(デジタルローパスフィルタの形の)整合フィルタが、同相シーケンスおよび直交シーケンスに適用される。
予想される信号波形はもちろん送信信号の波形に依存し、送信信号は測定条件および検出すべき物体の特性に応じて変わることが、受動モードで動作する好ましい実施形態の特徴である。
通常、短いまたは長い送信パルスが選択され、次にそれに対応する短いまたは長い局部発振器パルスおよび互いに異なる整合フィルタインパルス応答が選択される。送信パルス、局部発振器パルス、および整合フィルタインパルス応答の選択は、用途に応じて、到達距離、分解能、および精度の点で最適な応答が得られるように行う。
様々な到達距離にある車両の存在を検出するための、システムの1つの具体的な用途で使用されるパルスのいくつかの例が、次の表1に示されている。
位置決めシステムの用途
上述の位置決めシステムは、高セキュリティ環境に特に適しており、その場合、指定された区域周辺のスタッフおよび物体を追跡できる必要があることがある。スタッフおよび物体の追跡に加えて、システムが侵入者を検出する必要もある。
このセクションの説明においては、いくつかの用語が他のセクションの説明とは異なる意味で使用される。位置情報が所望されるエレメントは、「物体」ではなく「タグ」と呼ばれる。位置を計算する装置は、「制御ユニット」と同様に「基地局」とも呼ばれ、「基地局」には他のセクションの説明の「受信ユニット」の機能が組み込まれている。
これを実現する1つの方法は、必要に応じてタグおよび受信ユニットまたは制御ユニットに、別個の無線送信機を適合させるようにすることである。この送信機は、位置情報を決定するのに使用されるUWB送信機とは無関係に動作することができる。用途に応じて、この送信機は、簡単なアナログ無線を含むことも、あるいは例えばBluetoothやZigBee技術を使用した、より複雑なデジタル無線システムを含むこともできる。この二次送信機を使用して、すべてのデータの流れ、ならびにタグと制御ユニットの間の通信を管理することができる。その間、(制御ユニットに接続された)UWB送信機および受信機は、タグの検出、タグの位置の決定、および/またはタグの追跡を続行することになる。
別個の無線送受信機を使用してタグとセンサ/制御ユニットの間の通信を実現するための好ましい一代替手法においては、UWB送信機および受信機は無線リンクとしても使用される。そのような手法では、UWB無線システムは、タグ位置決め機能とタグ追跡機能をどちらも提供し、タグと制御ユニットの間の通信を可能にする。この利点は、1つの無線標準だけが必要とされ、したがって、ハードウェアの複雑さ、タグのサイズ、コスト、および/または電力消費が低減されることである。通信が両方向である場合、タグには、UWB送信機に加えてUWB受信機が必要となる。
UWB無線システムを使用してタグと制御ユニットの間の通信を実現するには、送信機からのUWB放射が変調される。第1の例では、パルス繰返し周波数変調技法が使用されている。
UWB無線システムを使用してタグと制御ユニットの間の通信を実現する一代替方法においては、タグ(および/または制御ユニット)が、周期的に中断されるパルスシーケンスを送信する。上記と同様に、送信されたパルスシーケンスから位置情報を決定することができるが、送信されたパルスシーケンスから得られる方位情報に加えて、パルスシーケンス中の中断パターンを分析することによって他の情報も得ることができる。
その後、タグは、(パルス間の時間があらかじめ決まった)連続した2パルスが「1」を示し、連続した2つの欠落パルス(無パルス)が「0」を示すパルスシーケンスを送信する(すなわち、2パルスがオンを示し、2つがオフを示すように切り換える)。
こうした様々な方法により、タグと制御ユニットの間で情報を伝送することができる。
こうした方法の1つを使用してタグからその付近に存在し得る受信機への通信を可能にする情報の重要な一部分が、タグの識別に関するものである。したがって、タグは、その位置およびそのIDをどちらも決定できるようにするパルスシーケンスを送信するように、適合させることができる。
概要においては、符号化(例えば上述のPRF符号化)方法を使用して、送信装置の識別情報、例えばMACアドレスを受信装置に送信する。受信装置は、MACアドレスを含む送信を受信し、その後、その情報が復号化されて、送信装置のMACアドレスが決定される。
1)送信装置(タグ)の位置およびそのMACアドレスを決定することのできる、UWBローカリゼーションモード。
標準通信モードでは、(DSRCやIEEE 802.11Aなどの)標準通信プロトコルを使用することができる。プロトコルは、UWBローカリゼーションモードで使用される信号と同じスペクトルで使用される。そのようなプロトコルは、上記で提案されているPRF符号化とは異なる符号化を使用する。
一例においては、図28に車両用途として図示されているが、短距離レーダ700は、送信機702および多重チャネル受信機704を含んでおり、その視野内の物体によって散乱した信号を検出する。
(a)システムの相互作用を最小限に抑えるために、レーダのパルス繰返し速度を、正確に5MHzに調整する。これにより、あいまいでない到達距離が30メートルに制限される。
上述の方法は、受信機と送信装置を含む物体との間の距離が大きくない場合に、具体的には距離が数十メートルまでの場合に、特に効果的である。
1.タグを検出する
第1の車両のUWBレーダシステムは、第2の車両のタグ/送信機からの信号を受信する。
第1の車両のレーダシステムは次に、本明細書に記載の技法を使用して、第2の車両のタグの位置を決定する。
第2の車両のタグによって送信された信号は、タグのPRFに周波数変調されたメッセージングを含んでいる。第1の車両のシステムは、タグからの信号を分析して、第2の車両のタグのMACアドレスを決定する。
第1の車両のレーダシステムは次いで、第2の車両のタグに、タグが標準DSRCまたはIEEE 802.11Aモードに切り換わるよう求める要求を送信する。
第1の車両のレーダシステムの要求があり次第、第2の車両のタグは、第2の車両の挙動に関する標準情報を第1の車両のレーダシステムに送信する。この情報には、例えば、車両の速度、ブレーキ状態、車両の性能、およびその他の情報に関する情報が含まれ得る。受信機システムはしたがって、DSRCチャネルを介して受信される第2の車両に関する情報を、位置決定から得られる方位情報および位置情報と相関させることができる。したがって、第1の車両に関して、車両の挙動を調整することによるブレーキ方針および事故回避方針を開発する場合に、この情報を考慮することができる。
車両は、携帯電話、携帯情報端末、コンピュータなどに送信された情報を複製し、それにより、任意の関連したデータベースに保持されたデータを同期化することができる。例えば車両のタイヤがパンクした、あるいは車両がいじられたとの情報であった場合、適切な人員に警報することができる。
これは、第1の車両のレーダシステムからの要求によって開始する、あるいは、例えばDSRCモードにおける所定の時間後に、自動的に行わせることができる。
上記のシステムにおいては、情報の取得に関して時間の制約がある場合に、特に利点がある。本明細書に記載の方法は、一般に時間および位置がクリティカルな状況に対して適用可能である。いくつかの例においては、メッセージングモード(例えばDSRCモード)と場所決定モードを高速に切り換えることが可能であり、情報を送信エレメントと受信エレメントの間で、必要なら中断できる情報のパケットで送信することができるように、システムを構成することができる。
検出アルゴリズム
図29は、上述の位置決めシステムで使用するための検出アルゴリズム600を構成するコンポーネントの、階層リストである。検出アルゴリズムは、共通/中核機能602、検出アルゴリズム本体604、および較正機能606、を含んでおり、すべて「メインループ」機能608の下にグループ化されている。
機能608は、初期設定の、永続的に実行するタイプの、プログラムのメインループである。
機能610は、特定のレーダタイプを指定する1つの引数をとり、レーダに対する基本的なシステムパラメータをすべて含むレコードを返す。
上位の機能618は、機能616によって提供される生レーダ掃引を入力としてとり、検出アルゴリズムの結果全体を含む実装固有の結果を返す。この機能は、中核の検出アルゴリズム機能をカプセル化し、後述の特定の検出機能の多くを呼び出す。
合計2N+1の可能性のある遅延が返され、その場合、アークサイン(遅延)により、到着の方向がラジアンで得られる。遅延+1は、波面が受信機対、受信機Aおよび受信機Bの軸に沿って、例えばAからBに伝播することを表す。遅延0は、波面がこの軸に垂直に伝播することを表し、遅延−1は、波面がこの軸に沿ってBからAに伝播することを表す。「遅延領域」処理を使用して、角度計算を行う。
本明細書、ならびに(適切な場合には)特許請求の範囲および図面で開示された各特徴は、独立して、または任意の適切な組合せで、提供することができる。
Claims (25)
- 送信機を組み込んだ物体に関する位置情報を決定するための機器であって、
単一のハウジング内あるいは共通の基板上に有る複数の受信エレメントを含み、前記組み込まれた送信機によって送信された特性繰返し周波数を有する信号を受信するための手段と、
前記受信エレメントで受信された信号を検出するための検出手段と、
前記検出手段をトリガする手段であって、当該トリガ手段が前記送信された信号の生成と独立であるトリガ手段と、
トリガ制御信号を受信する手段であって、前記トリガ手段が前記特性繰返し周波数と異なるトリガ周波数F trig =(F cr /n)+F diff で前記検出手段をトリガするように適合され、ここでF cr は前記特性繰返し周波数であり、nは整数の分周比であり、F diff は走査速度であるものと、
前記受信エレメントごとに、その受信エレメントで受信される前記信号にプロセスを適用し、その結果、その受信エレメントで前記信号が受信されたそれぞれのタイミングを得るように動作可能な処理手段と、を含み、
前記処理手段はさらに、こうして得られた前記タイミングを比較し、その結果、前記物体に関する角位置情報を取得するように動作可能な機器。 - 前記処理手段によって適用される前記プロセスが、前記信号の周波数、位相、帯域幅、およびパルス幅のうちの少なくとも1つに依存する、請求項1に記載の機器。
- 前記処理手段によって適用される前記プロセスが、前記受信手段からの前記物体の距離、または予想される距離に依存する、前記請求項のいずれかに記載の機器。
- 複数の可能なプロセスから、前記処理手段によって適用される前記プロセスを選択するように適合された選択手段をさらに含む、前記請求項のいずれかに記載の機器。
- 前記プロセスが整合フィルタを含む、前記請求項のいずれかに記載の機器。
- 前記プロセスが、複数の異なる時間オフセットでフィルタを前記出力信号に適用すること、および前記フィルタからの前記出力に応じて時間オフセットを選択することを含む、請求項5に記載の機器。
- 前記処理手段の動作が、複数の前記受信エレメントによって受信された信号の間の間隔を検出するように整合フィルタを適用し、それによって前記物体の角位置を決定することを含む、前記請求項のいずれかに記載の機器。
- 前記信号がパルス信号である、前記請求項のいずれかに記載の機器。
- 前記物体に向けてプローブ信号を送信するための手段をさらに含む、前記請求項のいずれかに記載の機器。
- プローブ信号を送信するための前記手段が、前記物体と関連した送信機によって送信される信号と異なる信号を送信するように適合される、請求項9に記載の機器。
- 前記プローブ信号を符号化し、それによってそれを前記物体から受信された信号と区別することができる手段をさらに含む、請求項9または10に記載の機器。
- 前記物体と関連した前記送信機によって送信される前記信号が、超広帯域(UWB)信号である、前記請求項のいずれかに記載の機器。
- 前記送信された信号が特定のパルス繰返し周波数で送信され、前記機器が当該周波数のパルスを受信するための同調手段を含む、請求項1乃至11に記載の機器。
- 前記周波数が複数の周波数分離を有する多重周波数からなる、請求項13に記載の機器。
- nが1より大きい、請求項1乃至11、又は13乃至14に記載の機器。
- Fdiffが非ゼロである、請求項15に記載の機器。
- FdiffがFcrの振幅の5%未満である、請求項15又は16に記載の機器。
- 更に前記処理手段と通信するための通信インターフェースを含む、請求項1乃至11又は13乃至17に記載の機器。
- 前記通信インターフェースが前記機器で受信された信号を表わす複数の信号を出力するように適合される、請求項18に記載の機器。
- 前記通信手段が前記処理手段から制御信号を受信するように適合される、請求項18又は19に記載の機器。
- 前記処理手段が更なる角位置に関連して前記検出手段の出力を処理するように適合され、その結果、前記物体に関する送信機の変位を決定する、請求項1乃至11又は13乃至18に記載の機器。
- 前記処理手段が前記検出手段から受信された複数の信号間のタイミング差を計算し、前記複数の信号の少なくとも2つの間のタイミング差に従属する角位置を決定するように適合される、請求項21に記載の機器。
- 前記受信手段が特性パルス周波数を有するパルス列を受信するように適合され、前記検出手段が前記受信されたパルス列を表わす信号を出力するように適合される、請求項1乃至11又は13乃至22に記載の機器。
- 前記検出手段が前記受信されたパルス波形を表わす信号を出力するように適合される、請求項23に記載の機器。
- 送信機を組み込んだ物体に関する位置情報を決定する方法であって、
単一のハウジング内あるいは共通の基板上にある複数の受信エレメントを含む受信手段で、前記組み込まれた送信機によって送信された特性繰返し周波数を有する信号を受信するステップと、
検出手段で、前記受信エレメントで受信された信号を検出するステップと、
前記検出手段をトリガする手段で、前記送信された信号の生成と独立にトリガするステップと、
トリガ制御信号を受信し、前記特性繰返し周波数と異なるトリガ周波数F trig =(F cr /n)+F diff で前記検出手段をトリガするステップであって、ここでF cr は前記特性繰返し周波数であり、nは整数の分周比であり、F diff は走査速度であるものと、
前記受信エレメントごとに、その受信エレメントで受信される前記信号にプロセスを適用し、その結果、その受信エレメントで前記信号が受信されたそれぞれのタイミングを取得し、更にこうして得られた前記タイミングを比較し、その結果、前記物体に関する角位置情報を取得するステップと、を含む方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB0325622.9 | 2003-11-03 | ||
| GBGB0325622.9A GB0325622D0 (en) | 2003-11-03 | 2003-11-03 | System for determining positional information |
| PCT/GB2004/004648 WO2005045455A2 (en) | 2003-11-03 | 2004-11-03 | Determining positional information |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012000740A Division JP2012108141A (ja) | 2003-11-03 | 2012-01-05 | 位置情報の決定 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007518968A JP2007518968A (ja) | 2007-07-12 |
| JP2007518968A5 JP2007518968A5 (ja) | 2007-12-20 |
| JP4987481B2 true JP4987481B2 (ja) | 2012-07-25 |
Family
ID=29725847
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006538922A Active JP4987481B2 (ja) | 2003-11-03 | 2004-11-03 | 位置情報の決定 |
| JP2012000740A Pending JP2012108141A (ja) | 2003-11-03 | 2012-01-05 | 位置情報の決定 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012000740A Pending JP2012108141A (ja) | 2003-11-03 | 2012-01-05 | 位置情報の決定 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7750841B2 (ja) |
| EP (1) | EP1690108B1 (ja) |
| JP (2) | JP4987481B2 (ja) |
| GB (1) | GB0325622D0 (ja) |
| WO (1) | WO2005045455A2 (ja) |
Families Citing this family (227)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8190162B2 (en) * | 2003-09-15 | 2012-05-29 | Broadcom Corporation | Radar detection circuit for a WLAN transceiver |
| US8120521B2 (en) * | 2003-10-28 | 2012-02-21 | Preco Electronics, Inc. | Radar echolocater with audio output |
| GB0325622D0 (en) * | 2003-11-03 | 2003-12-10 | Cambridge Consultants | System for determining positional information |
| US7729407B2 (en) * | 2005-01-21 | 2010-06-01 | Renesas Technology Corp. | Single-pulse and multi-pulse transmitted reference impulse radio systems with energy detecting receivers |
| US7720598B2 (en) * | 2005-03-31 | 2010-05-18 | Deere & Company | System and method for determining a position of a vehicle with compensation for noise or measurement error |
| US7653483B2 (en) * | 2005-03-31 | 2010-01-26 | Deere & Company | System and method for determining a position of a vehicle |
| US7647177B2 (en) | 2005-03-31 | 2010-01-12 | Deere & Company | System and method for determining a position of a vehicle |
| US10133888B2 (en) * | 2005-10-06 | 2018-11-20 | Universal Entertainment Corporation | Data reader and positioning system |
| DE102005054128A1 (de) * | 2005-11-14 | 2007-05-16 | Bosch Gmbh Robert | Werkzeugmaschinenüberwachungsvorrichtung |
| US8451162B2 (en) * | 2005-12-20 | 2013-05-28 | Walleye Technologies, Inc. | Microwave datum tool |
| JP4801990B2 (ja) * | 2005-12-26 | 2011-10-26 | 株式会社東芝 | 電子機器および該電子機器にて実行されるデータ転送方法 |
| US8886125B2 (en) | 2006-04-14 | 2014-11-11 | Qualcomm Incorporated | Distance-based association |
| US20070249288A1 (en) * | 2006-04-14 | 2007-10-25 | Kamran Moallemi | Distance-based security |
| US9215581B2 (en) | 2006-04-14 | 2015-12-15 | Qualcomm Incorported | Distance-based presence management |
| US7606290B1 (en) * | 2006-05-03 | 2009-10-20 | Rockwell Collins, Inc. | Architecture for signal acquisition with cyclic range search |
| JP4829148B2 (ja) * | 2007-03-01 | 2011-12-07 | 富士通コンポーネント株式会社 | 送受信装置 |
| US8473209B2 (en) | 2007-03-13 | 2013-06-25 | Certusview Technologies, Llc | Marking apparatus and marking methods using marking dispenser with machine-readable ID mechanism |
| US8700325B2 (en) | 2007-03-13 | 2014-04-15 | Certusview Technologies, Llc | Marking apparatus and methods for creating an electronic record of marking operations |
| US7640105B2 (en) | 2007-03-13 | 2009-12-29 | Certus View Technologies, LLC | Marking system and method with location and/or time tracking |
| US8060304B2 (en) | 2007-04-04 | 2011-11-15 | Certusview Technologies, Llc | Marking system and method |
| US8837724B2 (en) | 2007-03-27 | 2014-09-16 | Qualcomm Incorporated | Synchronization test for device authentication |
| US8098150B2 (en) * | 2007-05-25 | 2012-01-17 | Palo Alto Research Center Incorporated | Method and system for locating devices with embedded location tags |
| US9141961B2 (en) | 2007-06-20 | 2015-09-22 | Qualcomm Incorporated | Management of dynamic mobile coupons |
| US9483769B2 (en) | 2007-06-20 | 2016-11-01 | Qualcomm Incorporated | Dynamic electronic coupon for a mobile environment |
| US9524502B2 (en) | 2007-06-20 | 2016-12-20 | Qualcomm Incorporated | Management of dynamic electronic coupons |
| US8868220B2 (en) * | 2007-07-16 | 2014-10-21 | Crucs Holdings, Llc | Systems and methods for automatically changing operational states of appliances |
| US9076331B2 (en) * | 2007-07-16 | 2015-07-07 | Crucs Holdings, Llc | System and method to monitor vehicles on a roadway and to control driving restrictions of vehicle drivers |
| US8532342B2 (en) | 2008-02-12 | 2013-09-10 | Certusview Technologies, Llc | Electronic manifest of underground facility locate marks |
| US8242888B2 (en) * | 2008-06-05 | 2012-08-14 | Keystone Technology Solutions, Llc | Systems and methods to determine motion parameters using RFID tags |
| EP2133711B1 (de) * | 2008-06-13 | 2013-02-27 | Siemens Aktiengesellschaft | Verfahren zur Abstandsmessung und Datenübertragung in einem Dauerstrich-Radarsystem |
| US8965700B2 (en) | 2008-10-02 | 2015-02-24 | Certusview Technologies, Llc | Methods and apparatus for generating an electronic record of environmental landmarks based on marking device actuations |
| US8280631B2 (en) | 2008-10-02 | 2012-10-02 | Certusview Technologies, Llc | Methods and apparatus for generating an electronic record of a marking operation based on marking device actuations |
| JP5178353B2 (ja) * | 2008-06-30 | 2013-04-10 | キヤノン株式会社 | 無線通信装置、無線通信装置の制御方法、およびプログラム |
| US8424486B2 (en) | 2008-07-10 | 2013-04-23 | Certusview Technologies, Llc | Marker detection mechanisms for use in marking devices and methods of using same |
| IT1391337B1 (it) * | 2008-08-07 | 2011-12-05 | Univ Roma | Sistema integrato di localizzazione radioelettrica basato su forma d'onda rumorose |
| DE102008050988A1 (de) * | 2008-09-01 | 2010-03-04 | Gerd Reime | Identifikationselement mit einem optischen Transponder |
| US8400357B2 (en) * | 2008-09-30 | 2013-03-19 | Panasonic Corporation | Radio arrival direction estimation device and radio arrival direction estimation method |
| US20100188407A1 (en) | 2008-10-02 | 2010-07-29 | Certusview Technologies, Llc | Methods and apparatus for displaying and processing facilities map information and/or other image information on a marking device |
| US8600526B2 (en) | 2008-10-02 | 2013-12-03 | Certusview Technologies, Llc | Marking device docking stations having mechanical docking and methods of using same |
| US8510141B2 (en) | 2008-10-02 | 2013-08-13 | Certusview Technologies, Llc | Methods and apparatus for generating alerts on a marking device, based on comparing electronic marking information to facilities map information and/or other image information |
| US8442766B2 (en) | 2008-10-02 | 2013-05-14 | Certusview Technologies, Llc | Marking apparatus having enhanced features for underground facility marking operations, and associated methods and systems |
| US20100198663A1 (en) | 2008-10-02 | 2010-08-05 | Certusview Technologies, Llc | Methods and apparatus for overlaying electronic marking information on facilities map information and/or other image information displayed on a marking device |
| WO2010064723A1 (ja) * | 2008-12-05 | 2010-06-10 | サクラテック株式会社 | アレイアンテナ |
| US8116350B1 (en) * | 2009-01-14 | 2012-02-14 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Ultrawideband asynchronous tracking system and method |
| DE102009018311A1 (de) * | 2009-04-22 | 2010-10-28 | Valeo Schalter Und Sensoren Gmbh | Verfahren und Vorrichtung zum Betrieb eines radargestützten Umfelderkennungssystems |
| CA2710269C (en) | 2009-08-11 | 2012-05-22 | Certusview Technologies, Llc | Locating equipment communicatively coupled to or equipped with a mobile/portable device |
| CA2710189C (en) | 2009-08-20 | 2012-05-08 | Certusview Technologies, Llc | Methods and apparatus for assessing marking operations based on acceleration information |
| CA2713282C (en) * | 2009-08-20 | 2013-03-19 | Certusview Technologies, Llc | Marking device with transmitter for triangulating location during marking operations |
| EP2467674A1 (en) | 2009-08-20 | 2012-06-27 | Certusview Technologies, LLC | Methods and marking devices with mechanisms for indicating and/or detecting marking material color |
| US8531288B1 (en) | 2009-11-09 | 2013-09-10 | Carnegie Mellon University | System and method for collaborative resource tracking |
| US7990317B2 (en) * | 2009-12-18 | 2011-08-02 | At&T Mobility Ii Llc | Signal path delay determination |
| US8457657B2 (en) | 2010-01-22 | 2013-06-04 | Qualcomm Incorporated | Method and apparatus for peer-assisted localization |
| US8600606B2 (en) * | 2010-02-11 | 2013-12-03 | GM Global Technology Operations LLC | Vehicle safety systems and methods |
| EP2367021A1 (fr) * | 2010-03-17 | 2011-09-21 | The Swatch Group Research and Development Ltd. | Procédé et système de localisation d'objets |
| US8749433B2 (en) * | 2010-04-02 | 2014-06-10 | Position Imaging, Inc. | Multiplexing receiver system |
| DE102010014108A1 (de) * | 2010-04-07 | 2011-10-13 | Rohde & Schwarz Gmbh & Co. Kg | Verfahren und System zur Ortbestimmung einer ein elektromagnetisches Signal aussendenden Vorichtung |
| IL206385A (en) * | 2010-06-15 | 2015-08-31 | Elbit Systems Ew And Sigint Elisra Ltd | A method and system for determining emitter location characteristics |
| JP5640583B2 (ja) * | 2010-09-06 | 2014-12-17 | 日本電気株式会社 | 目標物探知システム、探知方法、及び探知情報処理プログラム |
| US10416276B2 (en) | 2010-11-12 | 2019-09-17 | Position Imaging, Inc. | Position tracking system and method using radio signals and inertial sensing |
| US8957812B1 (en) | 2010-11-12 | 2015-02-17 | Position Imaging, Inc. | Position tracking system and method using radio signals and inertial sensing |
| US11175375B2 (en) | 2010-11-12 | 2021-11-16 | Position Imaging, Inc. | Position tracking system and method using radio signals and inertial sensing |
| US20120129545A1 (en) * | 2010-11-19 | 2012-05-24 | IIlume Software, Inc. | Systems and methods for selectively invoking positioning systems for mobile device control applications using multiple sensing modalities |
| JP5581190B2 (ja) * | 2010-11-30 | 2014-08-27 | 東芝テック株式会社 | Rfidタグ位置検出装置およびrfidタグの位置検出方法 |
| US10542372B2 (en) | 2011-03-15 | 2020-01-21 | Qualcomm Incorporated | User identification within a physical merchant location through the use of a wireless network |
| US8830792B2 (en) * | 2011-04-18 | 2014-09-09 | Microsoft Corporation | Mobile device localization using audio signals |
| KR101220794B1 (ko) * | 2011-05-16 | 2013-01-15 | 엘에스산전 주식회사 | 도착시간차를 이용한 실시간 위치추적 시스템 |
| EP3187893B1 (en) | 2011-05-18 | 2022-07-06 | Lambda: 4 Entwicklungen GmbH | Method to determine the location of a receiver |
| DE102011076885B4 (de) * | 2011-06-01 | 2013-08-29 | Siemens Aktiengesellschaft | Verfahren zur Steuerung eines medizinischen Gerätes, Einrichtung mit einem medizinischen Gerät und Datenträger |
| DE102011076880A1 (de) * | 2011-06-01 | 2012-12-06 | Siemens Aktiengesellschaft | Verfahren zur Steuerung eines medizinischen Gerätes, Einrichtung mit einem medizinischen Gerät und Datenträger |
| US9066311B1 (en) * | 2011-06-15 | 2015-06-23 | Bae Systems Information And Electronic Systems Integration Inc. | Networked navigation and ranging methods |
| US11835639B2 (en) | 2011-08-03 | 2023-12-05 | Qualcomm Technologies, Inc. | Partially synchronized multilateration or trilateration method and system for positional finding using RF |
| DE102011083496A1 (de) * | 2011-09-27 | 2013-03-28 | Siemens Aktiengesellschaft | Verfahren zum Lokalisieren von beweglichen Objekten und zugehöriges System |
| US8483899B2 (en) * | 2011-10-06 | 2013-07-09 | Ford Global Technologies, Llc | Vehicle guidance system |
| US9945940B2 (en) | 2011-11-10 | 2018-04-17 | Position Imaging, Inc. | Systems and methods of wireless position tracking |
| US9933509B2 (en) | 2011-11-10 | 2018-04-03 | Position Imaging, Inc. | System for tracking an object using pulsed frequency hopping |
| US9554286B2 (en) * | 2011-12-02 | 2017-01-24 | Lear Corporation | Apparatus and method for detecting a location of a wireless device |
| US10674709B2 (en) | 2011-12-05 | 2020-06-09 | Radio Systems Corporation | Piezoelectric detection coupling of a bark collar |
| US11470814B2 (en) | 2011-12-05 | 2022-10-18 | Radio Systems Corporation | Piezoelectric detection coupling of a bark collar |
| US11553692B2 (en) | 2011-12-05 | 2023-01-17 | Radio Systems Corporation | Piezoelectric detection coupling of a bark collar |
| WO2013084030A1 (en) * | 2011-12-08 | 2013-06-13 | Nokia Corporation | Method, apparatus, and computer program product for secure distance bounding based on direction measurement |
| WO2013126391A1 (en) * | 2012-02-22 | 2013-08-29 | Bar Code Specialties, Inc. (Dba Bcs Solutions) | Overhead antenna live inventory locating system |
| DE102012004308B4 (de) * | 2012-03-01 | 2018-09-20 | Atlas Elektronik Gmbh | Annäherungssensor und Verfahren zum Bestimmen der Annäherung an einen elektrisch leitfähigen Körper |
| CN102589416B (zh) * | 2012-03-15 | 2014-05-07 | 浙江大学 | 用于非球面测量的波长扫描干涉仪及方法 |
| US9552503B2 (en) * | 2012-05-01 | 2017-01-24 | 5D Robotics, Inc. | Distributed positioning and collaborative behavior determination |
| TWI478035B (zh) * | 2012-05-08 | 2015-03-21 | Egalax Empia Technology Inc | 抑制低頻雜訊干擾的感測方法與裝置 |
| US9702963B2 (en) | 2012-05-30 | 2017-07-11 | Nokia Technologies Oy | Method, apparatus, and computer program product for high accuracy location determination |
| US10269182B2 (en) | 2012-06-14 | 2019-04-23 | Position Imaging, Inc. | RF tracking with active sensory feedback |
| US9782669B1 (en) | 2012-06-14 | 2017-10-10 | Position Imaging, Inc. | RF tracking with active sensory feedback |
| US10863313B2 (en) | 2014-08-01 | 2020-12-08 | Polte Corporation | Network architecture and methods for location services |
| US10440512B2 (en) * | 2012-08-03 | 2019-10-08 | Polte Corporation | Angle of arrival (AOA) positioning method and system for positional finding and tracking objects using reduced attenuation RF technology |
| US9519344B1 (en) | 2012-08-14 | 2016-12-13 | Position Imaging, Inc. | User input system for immersive interaction |
| US10180490B1 (en) | 2012-08-24 | 2019-01-15 | Position Imaging, Inc. | Radio frequency communication system |
| EP2891372B1 (en) | 2012-08-31 | 2017-06-28 | Nokia Technologies OY | Positioning devices |
| NO336454B1 (no) * | 2012-08-31 | 2015-08-24 | Id Tag Technology Group As | Anordning, system og fremgangsmåte for identifisering av objekter i et digitalt bilde, samt transponderanordning |
| US8934884B2 (en) * | 2012-09-21 | 2015-01-13 | SenionLab AB | Method and device for indoor position resolution |
| KR101331833B1 (ko) | 2012-10-10 | 2013-11-22 | 국방과학연구소 | 도래시간차를 이용한 위치 탐지방법 |
| JP6149374B2 (ja) * | 2012-10-11 | 2017-06-21 | 中国電力株式会社 | 位置標定システム及び移動端末の位置を標定する方法 |
| EP2735994B1 (en) * | 2012-11-27 | 2015-02-18 | ST-Ericsson SA | Near field communication method of detection of a tag presence by a tag reader |
| US10707971B2 (en) * | 2012-12-10 | 2020-07-07 | Apple Inc. | Ultrasound ranging for mobile devices |
| US10234539B2 (en) | 2012-12-15 | 2019-03-19 | Position Imaging, Inc. | Cycling reference multiplexing receiver system |
| US9482741B1 (en) | 2013-01-18 | 2016-11-01 | Position Imaging, Inc. | System and method of locating a radio frequency (RF) tracking device using a calibration routine |
| US10856108B2 (en) | 2013-01-18 | 2020-12-01 | Position Imaging, Inc. | System and method of locating a radio frequency (RF) tracking device using a calibration routine |
| RU2526588C1 (ru) * | 2013-03-15 | 2014-08-27 | Открытое акционерное общество "Авангард" | Устройство обнаружения людей под завалами и поиска взрывчатых и наркотических веществ |
| US9107057B2 (en) * | 2013-03-15 | 2015-08-11 | Cornerturn Llc | Methods, apparatuses, systems and computer readable mediums for determining location of assets |
| US10036806B2 (en) * | 2013-06-04 | 2018-07-31 | Koninklijke Philips N.V. | Distance measurement using the time-of-flight of signals |
| US20140368321A1 (en) * | 2013-06-12 | 2014-12-18 | Qualcomm Incorporated | Ultra-wideband ranging waveform |
| CA2918895A1 (en) * | 2013-07-24 | 2015-01-29 | Beestar Bv | Locating a tag in an area |
| DE102013224540A1 (de) * | 2013-11-29 | 2015-06-03 | Bayerische Motoren Werke Aktiengesellschaft | Lokalisierungssystem |
| US10634761B2 (en) | 2013-12-13 | 2020-04-28 | Position Imaging, Inc. | Tracking system with mobile reader |
| US9755797B2 (en) * | 2013-12-26 | 2017-09-05 | Mediatek Singapore Pte. Ltd. | Localization-based beamforming scheme for systems with multiple antennas |
| US10103796B2 (en) * | 2013-12-27 | 2018-10-16 | Intel IP Corporation | Apparatus, system and method of selectively responding to wireless transmissions |
| TWI522639B (zh) * | 2014-01-14 | 2016-02-21 | 宏碁股份有限公司 | 位置辨識裝置、位置辨識系統以及位置辨識方法 |
| US9497728B2 (en) | 2014-01-17 | 2016-11-15 | Position Imaging, Inc. | Wireless relay station for radio frequency-based tracking system |
| US10200819B2 (en) | 2014-02-06 | 2019-02-05 | Position Imaging, Inc. | Virtual reality and augmented reality functionality for mobile devices |
| JP6251087B2 (ja) * | 2014-03-12 | 2017-12-20 | 株式会社東芝 | 目標検出装置、及び目標検出方法 |
| FR3020699A1 (fr) * | 2014-04-30 | 2015-11-06 | Centre Nat Rech Scient | Procede de suivi de forme dans une scene observee par un capteur asynchrone de lumiere |
| US9179285B1 (en) | 2014-05-19 | 2015-11-03 | Disney Enterprises, Inc. | Reflection-based location detection |
| DE102014212650B4 (de) | 2014-06-30 | 2018-02-15 | Trumpf Medizin Systeme Gmbh + Co. Kg | Medizingerätesystem und Verfahren zur Ortung von Medizingeräten und mobilen Steuerungseinheiten des Medizingerätesystems |
| US11169988B2 (en) | 2014-08-22 | 2021-11-09 | Google Llc | Radar recognition-aided search |
| US9778749B2 (en) | 2014-08-22 | 2017-10-03 | Google Inc. | Occluded gesture recognition |
| WO2016070931A1 (en) * | 2014-11-07 | 2016-05-12 | Sony Corporation | Determining the geographic location of a portable electronic device with a synthetic antenna array |
| CN107113768B (zh) * | 2015-01-20 | 2020-11-27 | 红点定位公司 | 用于确定并提供无线设备的位置信息的方法、系统和装置 |
| US9720121B2 (en) * | 2015-01-28 | 2017-08-01 | Baker Hughes Incorporated | Devices and methods for downhole acoustic imaging |
| US9936352B2 (en) * | 2015-02-02 | 2018-04-03 | Qualcomm, Incorporated | Techniques for estimating distance between wireless communication devices |
| GB201501995D0 (en) * | 2015-02-06 | 2015-03-25 | Langford Joshua | Safety system for use with watercraft |
| US11132004B2 (en) | 2015-02-13 | 2021-09-28 | Position Imaging, Inc. | Spatial diveristy for relative position tracking |
| US10642560B2 (en) | 2015-02-13 | 2020-05-05 | Position Imaging, Inc. | Accurate geographic tracking of mobile devices |
| US10324474B2 (en) | 2015-02-13 | 2019-06-18 | Position Imaging, Inc. | Spatial diversity for relative position tracking |
| US11416805B1 (en) | 2015-04-06 | 2022-08-16 | Position Imaging, Inc. | Light-based guidance for package tracking systems |
| US10853757B1 (en) | 2015-04-06 | 2020-12-01 | Position Imaging, Inc. | Video for real-time confirmation in package tracking systems |
| US10148918B1 (en) | 2015-04-06 | 2018-12-04 | Position Imaging, Inc. | Modular shelving systems for package tracking |
| US11501244B1 (en) | 2015-04-06 | 2022-11-15 | Position Imaging, Inc. | Package tracking systems and methods |
| US9947196B2 (en) * | 2015-04-29 | 2018-04-17 | Senaya, Inc. | Wireless asset tracking systems with heterogeneous communication |
| CN111522434A (zh) | 2015-04-30 | 2020-08-11 | 谷歌有限责任公司 | 用于手势跟踪和识别的基于rf的微运动跟踪 |
| WO2016178381A1 (ja) * | 2015-05-07 | 2016-11-10 | 株式会社村田製作所 | 位置検知システムおよび位置検知方法 |
| EP3294629B1 (en) * | 2015-05-11 | 2019-07-10 | BAE Systems PLC | Aircraft coupling method and system |
| US10627499B2 (en) * | 2015-05-22 | 2020-04-21 | Witricity Corporation | Methods and apparatus utilizing digital signal processing of ultra wide band radar signals for living object detection in wireless power transfer applications |
| US10645908B2 (en) | 2015-06-16 | 2020-05-12 | Radio Systems Corporation | Systems and methods for providing a sound masking environment |
| DE102015214826A1 (de) * | 2015-08-04 | 2017-02-09 | Robert Bosch Gmbh | Verfahren und System zum Lokalisieren eines sich innerhalb eines Parkplatzes befindenden Fahrzeugs |
| GB201514249D0 (en) * | 2015-08-12 | 2015-09-23 | Trw Ltd | Processing received radiation reflected from a target |
| US10817065B1 (en) * | 2015-10-06 | 2020-10-27 | Google Llc | Gesture recognition using multiple antenna |
| CN108351400A (zh) * | 2015-11-10 | 2018-07-31 | Xco技术有限公司 | 用于超宽带位置定位的系统和方法 |
| CN106851550B (zh) | 2015-12-04 | 2020-02-14 | 华为技术有限公司 | 一种定位终端的方法以及基带单元 |
| US20170168134A1 (en) * | 2015-12-10 | 2017-06-15 | Qualcomm Incorporated | Object Detection |
| KR101708199B1 (ko) * | 2015-12-24 | 2017-02-20 | 한국항공우주연구원 | 전파원 위치 추정 시스템 |
| DE102017100909B4 (de) | 2016-01-22 | 2024-01-25 | GM Global Technology Operations LLC | Schätzung eines Einfallswinkels |
| US10539645B2 (en) * | 2016-01-22 | 2020-01-21 | GM Global Technology Operations LLC | Angle of arrival estimation |
| CH712188A1 (de) * | 2016-03-01 | 2017-09-15 | Peter Weisz Wm Fahne 2006 Gmbh | System und Methode zur Ortung eines Gegenstandes. |
| US10444323B2 (en) | 2016-03-08 | 2019-10-15 | Position Imaging, Inc. | Expandable, decentralized position tracking systems and methods |
| US10705179B2 (en) * | 2016-04-22 | 2020-07-07 | Tandemlaunch | Device-free subject localization methods and systems using wireless signals |
| US10564116B2 (en) | 2016-04-28 | 2020-02-18 | Fluke Corporation | Optical image capture with position registration and RF in-wall composite image |
| US10254398B2 (en) | 2016-04-28 | 2019-04-09 | Fluke Corporation | Manipulation of 3-D RF imagery and on-wall marking of detected structure |
| US10209357B2 (en) * | 2016-04-28 | 2019-02-19 | Fluke Corporation | RF in-wall image registration using position indicating markers |
| US10585203B2 (en) | 2016-04-28 | 2020-03-10 | Fluke Corporation | RF in-wall image visualization |
| US10571591B2 (en) | 2016-04-28 | 2020-02-25 | Fluke Corporation | RF in-wall image registration using optically-sensed markers |
| EP3465255A1 (en) * | 2016-06-01 | 2019-04-10 | Sony Mobile Communications Inc. | Radar probing employing pilot signals |
| US10268220B2 (en) | 2016-07-14 | 2019-04-23 | Radio Systems Corporation | Apparatus, systems and methods for generating voltage excitation waveforms |
| US10302793B2 (en) | 2016-08-04 | 2019-05-28 | Fluke Corporation | Blending and display of RF in wall imagery with data from other sensors |
| CN106896356B (zh) | 2016-08-17 | 2019-11-19 | 阿里巴巴集团控股有限公司 | 确定距离变化的方法、位置提示方法及其装置和系统 |
| US11436553B2 (en) | 2016-09-08 | 2022-09-06 | Position Imaging, Inc. | System and method of object tracking using weight confirmation |
| US11047702B1 (en) * | 2016-09-16 | 2021-06-29 | Apple Inc. | Tracking systems for electronic devices |
| US20180083661A1 (en) * | 2016-09-22 | 2018-03-22 | Qualcomm Incorporated | Wideband Residual Sideband Calibration |
| JP6649865B2 (ja) * | 2016-10-27 | 2020-02-19 | 株式会社Soken | 物体検知装置 |
| WO2018085766A1 (en) * | 2016-11-04 | 2018-05-11 | Trustees Of Tufts College | Mobile network localization |
| US10634503B2 (en) | 2016-12-12 | 2020-04-28 | Position Imaging, Inc. | System and method of personalized navigation inside a business enterprise |
| US10455364B2 (en) | 2016-12-12 | 2019-10-22 | Position Imaging, Inc. | System and method of personalized navigation inside a business enterprise |
| US10634506B2 (en) | 2016-12-12 | 2020-04-28 | Position Imaging, Inc. | System and method of personalized navigation inside a business enterprise |
| WO2018112224A1 (en) | 2016-12-14 | 2018-06-21 | Denso International America, Inc. | Method and system for establishing microlocation zones |
| US10444344B2 (en) | 2016-12-19 | 2019-10-15 | Fluke Corporation | Optical sensor-based position sensing of a radio frequency imaging device |
| US11120392B2 (en) | 2017-01-06 | 2021-09-14 | Position Imaging, Inc. | System and method of calibrating a directional light source relative to a camera's field of view |
| US10928496B2 (en) | 2017-01-06 | 2021-02-23 | Panasonic Intellectual Property Management Co., Ltd. | Sensor and method for estimating position of living body |
| RU2656370C1 (ru) * | 2017-01-10 | 2018-06-05 | Акционерное общество "ЗАСЛОН" | Способ отождествления пеленгов источников радиоизлучений по их радиотехническим характеристикам двухпозиционными пассивными радиоэлектронными средствами |
| AU2018224313B2 (en) | 2017-02-27 | 2023-10-12 | Radio Systems Corporation | Threshold barrier system |
| US10914834B2 (en) | 2017-05-10 | 2021-02-09 | Google Llc | Low-power radar |
| US10432244B2 (en) * | 2017-05-22 | 2019-10-01 | Peloton Technology, Inc. | Transceiver antenna system for platooning |
| EP3407082B1 (en) * | 2017-05-24 | 2021-06-23 | Apple Inc. | Apparatus and method for determining a distance to an object |
| ES2919023T3 (es) * | 2017-05-31 | 2022-07-21 | Fraunhofer Ges Forschung | Aparato, sistema de medición para probar un aparato y métodos para operar el mismo |
| US10782390B2 (en) | 2017-05-31 | 2020-09-22 | Google Llc | Full-duplex operation for radar sensing using wireless communication chipset |
| US10795009B2 (en) * | 2017-05-31 | 2020-10-06 | Google Llc | Digital beamforming for radar sensing using wireless communication chipset |
| US10754005B2 (en) | 2017-05-31 | 2020-08-25 | Google Llc | Radar modulation for radar sensing using a wireless communication chipset |
| IT201700062080A1 (it) * | 2017-06-07 | 2018-12-07 | Mecoil Diagnosi Mecc S R L | Sistema e metodo di tracciamento individuale |
| US20190066504A1 (en) * | 2017-06-18 | 2019-02-28 | George Zaloom | System for automatically determining the position and velocity of objects |
| US10171129B1 (en) * | 2017-07-03 | 2019-01-01 | Apple Inc. | Pulse shaping interoperability protocol for ultra wideband systems |
| US10690743B2 (en) * | 2017-08-17 | 2020-06-23 | GM Global Technology Operations LLC | Doppler measurements to resolve angle of arrival ambiguity of wide aperture radar |
| JP2019060607A (ja) * | 2017-09-22 | 2019-04-18 | 株式会社オートネットワーク技術研究所 | 受信装置、通信システム、距離判定方法及びコンピュータプログラム |
| US11394196B2 (en) | 2017-11-10 | 2022-07-19 | Radio Systems Corporation | Interactive application to protect pet containment systems from external surge damage |
| EP4227703A1 (en) * | 2017-11-13 | 2023-08-16 | Telefonaktiebolaget LM Ericsson (publ) | Technique for ultra-wide band positioning |
| RU2684440C1 (ru) * | 2017-12-07 | 2019-04-09 | Акционерное Общество "Концерн "Океанприбор" | Способ отождествления объектов, обнаруженных несколькими системами |
| US10842128B2 (en) | 2017-12-12 | 2020-11-24 | Radio Systems Corporation | Method and apparatus for applying, monitoring, and adjusting a stimulus to a pet |
| US10986813B2 (en) | 2017-12-12 | 2021-04-27 | Radio Systems Corporation | Method and apparatus for applying, monitoring, and adjusting a stimulus to a pet |
| US10514439B2 (en) | 2017-12-15 | 2019-12-24 | Radio Systems Corporation | Location based wireless pet containment system using single base unit |
| US11372077B2 (en) | 2017-12-15 | 2022-06-28 | Radio Systems Corporation | Location based wireless pet containment system using single base unit |
| DE102018200395A1 (de) * | 2018-01-11 | 2019-07-11 | Robert Bosch Gmbh | Radarsystem mit in einer zentralen Steuereinheit integriertem Taktgeber |
| US11802936B2 (en) * | 2018-01-15 | 2023-10-31 | Sony Network Communications Europe B.V. | Determining a position of a device with respect to another device |
| US10401472B2 (en) * | 2018-01-18 | 2019-09-03 | Ciholas, Inc. | System and method for range and angle determination to an array of radio receivers |
| US11237249B2 (en) | 2018-01-22 | 2022-02-01 | Mediatek Inc. | Apparatus and method for applying frequency calibration to local oscillator signal derived from reference clock output of active oscillator that has no electromechanical resonator |
| US10659941B2 (en) * | 2018-03-13 | 2020-05-19 | Cypress Semiconductor Corporation | Communicating packets in a mesh network |
| US11255945B2 (en) | 2018-03-27 | 2022-02-22 | Polte Corporation | Multi-path mitigation in tracking objects using compressed RF data |
| EP3572829B1 (en) * | 2018-05-25 | 2024-01-17 | Airbus Defence and Space GmbH | Synchronized radar networks |
| FR3085491B1 (fr) * | 2018-08-31 | 2021-02-12 | Uwinloc | Procede de localisation de donnees, systeme de controle, dispositif emetteur |
| CA3111595A1 (en) | 2018-09-21 | 2020-03-26 | Position Imaging, Inc. | Machine-learning-assisted self-improving object-identification system and method |
| WO2020146861A1 (en) | 2019-01-11 | 2020-07-16 | Position Imaging, Inc. | Computer-vision-based object tracking and guidance module |
| US11137472B2 (en) * | 2019-01-24 | 2021-10-05 | Bae Systems Information And Electronic Systems Integration Inc. | Amplitude based centroiding for angle of arrival estimation |
| JP7407200B2 (ja) | 2019-05-20 | 2023-12-28 | グーグル エルエルシー | マルチモードインターフェイスを提供するためのモバイルデバイスベースのレーダーシステム、およびそのための方法 |
| EP3928181A1 (en) | 2019-06-17 | 2021-12-29 | Google LLC | Mobile device-based radar system for applying different power modes to a multi-mode interface |
| KR102285581B1 (ko) * | 2019-07-05 | 2021-08-03 | 주식회사 에스원 | 인공지능 클라이언트 장치 및 이의 동작 방법 |
| US11238889B2 (en) | 2019-07-25 | 2022-02-01 | Radio Systems Corporation | Systems and methods for remote multi-directional bark deterrence |
| RU2730103C1 (ru) * | 2019-08-16 | 2020-08-17 | Акционерное Общество "Концерн "Океанприбор" | Способ отождествления объектов, обнаруженных пространственно-разнесенными системами |
| JP2021038991A (ja) * | 2019-09-03 | 2021-03-11 | 株式会社フューチャースタンダード | センサモジュール |
| US11824711B2 (en) * | 2019-09-25 | 2023-11-21 | Qualcomm Incorporated | Techniques for configuring a time gap for a probing pulse signal |
| AU2020356248B2 (en) | 2019-09-26 | 2023-03-16 | Assa Abloy Ab | Ultra-wide band antenna configuration for physical access control system |
| US10728378B1 (en) * | 2019-10-01 | 2020-07-28 | GM Global Technology Operations LLC | Crash detection using smartphone sensor data |
| US10926738B1 (en) | 2019-12-17 | 2021-02-23 | Robert Bosch Gmbh | Method and system for self-learning radio node positions within a vehicle structure |
| US11719786B2 (en) * | 2020-02-25 | 2023-08-08 | The United States Of America As Represented By The Secretary Of The Army | Asynchronous, coherent, radar transmitter-receiver system |
| JP2021135271A (ja) * | 2020-02-28 | 2021-09-13 | ダイキン工業株式会社 | 配置特定システム |
| RU2752863C1 (ru) * | 2020-06-03 | 2021-08-11 | Акционерное общество "Концерн "Созвездие" | Способ стробового отождествления сигналов с источниками радиоизлучения в многоцелевой обстановке |
| US11490597B2 (en) | 2020-07-04 | 2022-11-08 | Radio Systems Corporation | Systems, methods, and apparatus for establishing keep out zones within wireless containment regions |
| WO2022025602A1 (en) * | 2020-07-28 | 2022-02-03 | Samsung Electronics Co., Ltd. | Method and system for user intent detection in ultra wide band systems |
| WO2022032059A1 (en) * | 2020-08-07 | 2022-02-10 | Analog Devices, Inc. | Secure passive wireless sensor and related methods |
| US11092462B1 (en) * | 2021-01-22 | 2021-08-17 | Eric HASELTINE | Systems and methods for through wall locating |
| US20220276074A1 (en) * | 2021-01-22 | 2022-09-01 | Eric HASELTINE | Systems and methods for through wall locating |
| US20220268908A1 (en) * | 2021-02-23 | 2022-08-25 | Cobalt Solutions, Inc. | Systems and Methods for Detecting Physical Objects Using Passive Radar Receivers |
| EP4047383A1 (en) * | 2021-02-23 | 2022-08-24 | Nxp B.V. | Communication device and operating method |
| US11733372B1 (en) * | 2022-03-28 | 2023-08-22 | Bluehalo, Llc | System and method for dynamic two-way ranging using unmanned aerial vehicles |
| US11693432B1 (en) | 2022-05-24 | 2023-07-04 | Bluehalo, Llc | System and method for autonomously controlling a set of unmanned aerial vehicles |
| CN115119195B (zh) * | 2022-06-07 | 2024-03-22 | 三星电子(中国)研发中心 | 获取设备mac地址的方法和装置 |
| CN117420538B (zh) * | 2023-12-18 | 2024-03-08 | 深圳捷扬微电子有限公司 | 一种超宽带系统的测距方法 |
Family Cites Families (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4236159A (en) * | 1975-02-03 | 1980-11-25 | The United States Of America As Represented By The Secretary Of The Navy | Passive direction finding system |
| GB1493732A (en) * | 1975-07-24 | 1977-11-30 | Standard Telephones Cables Ltd | Radio direction finding equipment |
| US4128759A (en) * | 1977-11-21 | 1978-12-05 | The United States Of America As Represented By The Secretary Of The Navy | Fiber optic delay line filter |
| DE2843253A1 (de) | 1978-10-04 | 1980-04-17 | Standard Elektrik Lorenz Ag | Navigationssystem zur richtungs- und entfernungsmessung |
| JPS61139770A (ja) | 1984-12-12 | 1986-06-27 | Koden Electronics Co Ltd | 簡易形方向探知装置 |
| GB2326299B (en) | 1985-08-17 | 1999-03-31 | British Aerospace | Target detection |
| US4910526A (en) * | 1987-05-18 | 1990-03-20 | Avion Systems, Inc. | Airborne surveillance method and system |
| US5075694A (en) * | 1987-05-18 | 1991-12-24 | Avion Systems, Inc. | Airborne surveillance method and system |
| JPH0359481A (ja) * | 1989-07-28 | 1991-03-14 | Nec Corp | 方位測定装置 |
| GB2261788A (en) | 1991-09-26 | 1993-05-26 | Ist Lab Ltd | A location system |
| US5361072A (en) * | 1992-02-28 | 1994-11-01 | Codar Ocean Sensors, Ltd. | Gated FMCW DF radar and signal processing for range/doppler/angle determination |
| JP2818077B2 (ja) * | 1992-06-02 | 1998-10-30 | キャメリク ヘラー アラン | 目標標定システムおよび標定方法 |
| US5444451A (en) * | 1992-06-29 | 1995-08-22 | Southwest Research Institute | Passive means for single site radio location |
| US5327144A (en) * | 1993-05-07 | 1994-07-05 | Associated Rt, Inc. | Cellular telephone location system |
| US5963677A (en) * | 1994-10-25 | 1999-10-05 | Raytheon Ti Systems, Inc. | Pulse repetition interval correlator utilizing zero mean matched filtering and difference minimization correlation |
| EP0778953B1 (de) * | 1995-07-01 | 2002-10-23 | Robert Bosch GmbH | Monostatischer fmcw-radarsensor |
| AUPN733395A0 (en) * | 1995-12-22 | 1996-01-25 | University Of Technology, Sydney | Location and tracking system |
| US5742252A (en) * | 1996-08-26 | 1998-04-21 | Raytheon Company | Ambiguity resolving algorithm for interferometers of arbitray topologies |
| US5859613A (en) | 1996-08-30 | 1999-01-12 | Harris Corporation | System and method for geolocating plural remote transmitters |
| US5945948A (en) | 1996-09-03 | 1999-08-31 | Motorola, Inc. | Method and apparatus for location finding in a communication system |
| JP2918853B2 (ja) * | 1996-10-01 | 1999-07-12 | レイセオン・カンパニー | 乗り物位置トラッキング方法及びシステム |
| US6040800A (en) * | 1997-04-22 | 2000-03-21 | Ericsson Inc. | Systems and methods for locating remote terminals in radiocommunication systems |
| JPH1114739A (ja) * | 1997-06-24 | 1999-01-22 | Matsuo Sekine | 信号処理装置、レーダ信号処理装置およびレーダ信号処理方法 |
| US6133876A (en) * | 1998-03-23 | 2000-10-17 | Time Domain Corporation | System and method for position determination by impulse radio |
| US6111536A (en) * | 1998-05-26 | 2000-08-29 | Time Domain Corporation | System and method for distance measurement by inphase and quadrature signals in a radio system |
| GB2346753A (en) | 1998-10-21 | 2000-08-16 | Rnli | Direction finding aerials |
| FR2785394A1 (fr) | 1998-11-03 | 2000-05-05 | Thomson Csf | Radar maritime |
| SE9902400L (sv) * | 1998-11-09 | 2000-07-20 | Micro Positioning Ab | Anordning för positionsbestämning |
| US6184829B1 (en) * | 1999-01-08 | 2001-02-06 | Trueposition, Inc. | Calibration for wireless location system |
| US7260369B2 (en) * | 2005-08-03 | 2007-08-21 | Kamilo Feher | Location finder, tracker, communication and remote control system |
| US6497656B1 (en) * | 2000-02-08 | 2002-12-24 | General Electric Company | Integrated wireless broadband communications network |
| US6556942B1 (en) * | 2000-09-29 | 2003-04-29 | Ut-Battelle, Llc | Short range spread-spectrum radiolocation system and method |
| US6421010B1 (en) * | 2001-02-16 | 2002-07-16 | The United States Of America As Represented By The Secretary Of Commerce | Atmospheric sondes and method for tracking |
| US7212563B2 (en) * | 2001-05-04 | 2007-05-01 | Wherenet Corp | Real-time locating system and method using timing signal |
| AUPR558501A0 (en) | 2001-06-12 | 2001-07-12 | Citech Sports Corporation Pty Ltd | System and method for monitoring and displaying athlete char acteristics |
| US6760387B2 (en) * | 2001-09-21 | 2004-07-06 | Time Domain Corp. | Impulse radio receiver and method for finding angular offset of an impulse radio transmitter |
| US7269427B2 (en) * | 2001-10-09 | 2007-09-11 | General Electric Company | Transmitter location for ultra-wideband, transmitted-reference CDMA communication system |
| JP2003121537A (ja) * | 2001-10-18 | 2003-04-23 | Sony Corp | 監視方法およびそのシステムと受信装置 |
| GB2383708A (en) | 2001-12-31 | 2003-07-02 | Systems Engineering & Assessme | Position determination |
| US7191385B2 (en) * | 2003-04-24 | 2007-03-13 | Locus Location Systems, Llc | Error correction in a locating method and system |
| GB0325622D0 (en) * | 2003-11-03 | 2003-12-10 | Cambridge Consultants | System for determining positional information |
-
2003
- 2003-11-03 GB GBGB0325622.9A patent/GB0325622D0/en not_active Ceased
-
2004
- 2004-11-03 US US10/577,941 patent/US7750841B2/en active Active
- 2004-11-03 EP EP04798377.0A patent/EP1690108B1/en active Active
- 2004-11-03 JP JP2006538922A patent/JP4987481B2/ja active Active
- 2004-11-03 WO PCT/GB2004/004648 patent/WO2005045455A2/en active Application Filing
-
2012
- 2012-01-05 JP JP2012000740A patent/JP2012108141A/ja active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| EP1690108A2 (en) | 2006-08-16 |
| GB0325622D0 (en) | 2003-12-10 |
| JP2012108141A (ja) | 2012-06-07 |
| WO2005045455A3 (en) | 2005-08-04 |
| WO2005045455A2 (en) | 2005-05-19 |
| EP1690108B1 (en) | 2013-10-16 |
| US20080204322A1 (en) | 2008-08-28 |
| JP2007518968A (ja) | 2007-07-12 |
| US7750841B2 (en) | 2010-07-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4987481B2 (ja) | 位置情報の決定 | |
| Miesen et al. | Where is the tag? | |
| EP3186655B1 (en) | Indoor position location using delayed scanned directional reflectors | |
| US6466125B1 (en) | System and method using impulse radio technology to track and monitor people needing health care | |
| US6759948B2 (en) | Railroad collision avoidance system and method for preventing train accidents | |
| US6614384B2 (en) | System and method for detecting an intruder using impulse radio technology | |
| US7230980B2 (en) | Method and apparatus for impulse radio transceiver calibration | |
| US6552677B2 (en) | Method of envelope detection and image generation | |
| US6492906B1 (en) | System and method using impulse radio technology to track and monitor people under house arrest | |
| US6760387B2 (en) | Impulse radio receiver and method for finding angular offset of an impulse radio transmitter | |
| US6763282B2 (en) | Method and system for controlling a robot | |
| US6501393B1 (en) | System and method for using impulse radio technology to track and monitor vehicles | |
| US6489893B1 (en) | System and method for tracking and monitoring prisoners using impulse radio technology | |
| US20050270228A1 (en) | Radar system for local positioning | |
| CN109375167B (zh) | 井下无源动目标定位方法 | |
| US20070182618A1 (en) | System and method for intrusion detection using a time domain radar array | |
| EP1373924A1 (en) | Method of envelope detection and image generation | |
| US20030030583A1 (en) | System and method of emergency apparatus pre-deployment using impulse radio radar | |
| EP2815249B1 (en) | Method and apparatus for estimating a distance and a location through near-field multi-frequency radio transmissions | |
| Hassan et al. | Ranging estimation using dual-frequency doppler technique |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071101 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071101 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101101 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101109 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110209 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110217 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110308 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110315 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110408 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110415 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110509 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20110906 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110908 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120105 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20120228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120327 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120425 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4987481 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150511 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |