以下、図面を参照して本発明の実施形態を説明する。
(第1の実施形態)
図1乃至図12は本発明のスキャナ装置の第1の実施形態を示すもので、図1は本発明の第1の実施形態による車載用測距装置に用いられるスキャナ装置の斜視図、図2は一部部品を省略した状態の上記スキャナ装置の上面図、図3はスキャナ装置の側面図、図4はスキャナ装置の分解斜視図、図5はスキャナ装置の2軸アクチュエータの分解斜視図、図6は2軸アクチュエータのヨーク部組に取り付けられる基板の斜視図、図7乃至図9は2軸アクチュエータを形成する部組の分解斜視図、図10はリレーレンズ部組の分解斜視図、図11は本発明の第1の実施形態によるスキャナ装置を用いた車載用測距装置の使用例を示した図、図12は磁石による駆動原理を説明するための図である。
図4に示されるように、本実施形態のスキャナ装置は、その本体155に、2軸アクチュエータ125と、リレーレンズ部組130と、レンズ165及びホルダ167等が搭載されて構成されている。そして、上記2軸アクチュエータ125は、図5に示されるように、バネ部組73とヨーク部組78とを有して構成されている。更に、バネ部組73は、可動部10と固定部43より構成されている。
先ず、図5及び図7を参照して、この可動部10の構造について説明する。
可動部10は、大別して、ホルダ11と、複数のエレベーションコイル19a〜19d及びアジマスコイル20a、20bと基板25と、走査レンズ30と、カバー35とを有して構成される。
上記ホルダ11は、カーボン繊維入りの液晶ポリマ樹脂で製作されたもので、そのベース12の略中央部に開口13が形成されている。この開口13の内部には、更に段状部18が形成されており、光学素子である走査レンズ30が、Z方向に当て付けられて接着固定されている。また、ホルダ11のベース12の周囲でX軸方向の両端には、複数の凸部14a〜14fが形成されている。このうち、凸部14a、14b、14e、14fは、銅クラッドアルミ線で巻線された空芯コイルのエレベーションコイル19a、19b、19c、19dの内側の開口部21a、21b、21c、21dに嵌挿されて接着固定されている。同様に、上記凸部14c、14dには、銅クラッドアルミ線で巻線された空芯コイルのアジマスコイル20a、20bの内側の開口部22a、22bが嵌挿され、接着固定されている。
ホルダ11には、基板25も接着固定されている。ホルダ11のベース12には、円形断面を有する複数の柱部15a〜15dが設けられており、これらの柱部15a〜15dに上記基板25に形成された孔27a〜27dが挿入されることにより、位置決めされている。但し、柱部15a〜15dと孔27a〜27dの全て大きさ、間隔を一致させるのは公差があり困難である。そこで、孔27cは柱部15cより僅かに大きな直径を有し、孔27bは孔27c、27bを結ぶ方向に平行な直線部を有する長孔とし、直線部の距離は柱部15bより僅かに大きくされ、この2箇所でX軸、Y軸方向に、基板25がホルダ11に対して位置決めされている。
基板25に形成された孔27a、27dは、柱部15a、15dに対して十分大きな直径を有するものとされ、公差によって孔27a、27dと、柱部15a、15dが干渉し、取り付けできないということがないようにされている。尚、Z軸方向については、基板25がホルダ11に当て付けられて、位置決めされている。
尚、ホルダ11のベース12には、孔16a〜16h(但し、16d〜16hは、図7では影になっているため示されない)が形成され、これら孔16a〜16hに対応して基板25には孔28a〜28hが形成されている。これらの孔16a〜16h及び孔28a〜28hは、詳細を後述する可動部10と固定部43を接続するためのワイヤバネ70a〜70hを通すためのものである。
更に、上記基板25には、図7に於いて、開口26を挟んだY軸方向で、孔27aと孔27bの間と、孔27cと孔27dの間には、それぞれ開口29a、29bが設けられている。そして、これらの開口29a、29bと対応して、ホルダ11のベース12にも、柱部15aと柱部15bの間に開口17aが、柱部15cと柱部15dの間には開口17bが、それぞれ設けられている。
また、この可動部10のZ軸方向に於いて、ホルダ11に固定された基板25上には、カーボン繊維入りの液晶ポリマ樹脂で製作されたカバー35が接着固定されている。ホルダ11とカバー35の間に存在する走査レンズ30、エレベーションコイル19a〜19d、アジマスコイル20a、20b、基板25は、何れもホルダ11に接着固定されると共に、ホルダ11とカバー35に挟持されるように固定されており、万が一ホルダ11への接着が緩んでも脱落することはない。カバー35は、基板25と同様に、ホルダ11の柱部15a〜15dが、該カバー35に形成された複数の孔38a〜38dに嵌挿されることによって位置決めされている。孔38a〜38dの形状と柱部15a〜15dとの関係も、基板25の孔27a〜27dと同様である。
更に、Z軸方向については、カバー35がホルダ11及び走査レンズ30、エレベーションコイル19a〜19d、アジマスコイル20a、20b、基板25に当て付けられて、位置決めされている。このとき、公差を考慮して、ホルダ11以外は僅かに間隙ができるようにされている。この間隙は、接着剤が入り込むことによって埋まり、これにより、上述した走査レンズ30、エレベーションコイル19a〜19d、アジマスコイル20a、20b、基板25が挟持された状態でのガタつきはなくなる。
上記カバー35の略中央部には、開口36を有した凸部37が形成されており、走査レンズ30はこの凸部37に配置されている。ホルダ11の開口13、基板25の開口26、カバー35の開口36は、走査レンズ30の入射光及び射出光の光路となっている。
カバー35の開口36を挟んでY軸方向には、スリット40a、40bが設けられている。スリット40aはY軸方向に延出された長方形形状、スリット40bはX軸方向に延出された長方形形状となっている。上述したホルダ11の開口17a、17b及び基板252の開口29a、29bは、後述する発光ダイオード58a、58bからの光を、これらスリット40a、40bに導くために形成されたものである。また、上記スリット40a、40bを挟むようにして、後述するワイヤバネ70a〜70hを通すための開口39a〜39dが形成されている。
次に、図5及び図8を参照して、固定部43の構造について説明する。
固定部43に於いて、ガラス繊維入り液晶ポリマ樹脂で製作されたバネ受け45は、その略中央部に開口46が形成されており、この開口46の周辺に、ネジ穴49a〜49dを有した凸部48a〜48dが形成されている。また、上記開口46を挟んでY軸方向に、可動部10と固定部43を接続する、後述するワイヤバネ70a〜70hを通すための貫通孔47a〜47dが形成されている。更に、バネ受け45のY軸方向で図8に於いて上部には、後述するベース80bの位置決め用の凸部51a、51bと、該ベース80bをネジ止めするためのネジ穴52a、52bが設けられている。尚、バネ受け45の凸部48a〜48dが形成されている面と反対側には、凹部53が形成されている。
上記バネ受け45には、基板55が固定されている。上記基板55には、その中央部に形成された開口56の周囲に、ネジ止め用の孔59a〜59dが設けられている。これらの孔59a〜59d及びバネ受け45のネジ穴49a〜49dに対して、ネジ60a〜60dでネジ止めされることによって、基板55がバネ受け45に固定されている。
また、上記基板55には、Z軸方向で上記バネ受け45と反対側に、基板57a、57bが固定されている。基板57a、57bには、それぞれ発光ダイオード58a、58bが半田付けされている。基板57a、57bの基板55への固定は半田付けによる。基板57a、57bを用いているのは、レイアウト上、発光ダイオード58a、58bを基板55よりZ軸方向でバネ受け45側と反対側に大きく突出させたいためである。基板55には、図示されない電線が接続され、更に、この電線が図示されない制御基板に接続されており、発光ダイオード58a、58bは制御基板に接続されている。
一方、上記バネ受け45には、Z軸方向で基板55側と反対側に、基板63a、63bも固定されている。基板63a、63bは、その略中央に形成された孔64a、64bを用いて、ネジ68a、68bにより、バネ受け45に固定されている。尚、バネ受け45には、図8に於いては影になっているので図示されていないが、ネジ68a、68bをねじ込むためのネジ穴が用意されている。
また、基板63aは、位置決め用の孔65a、65bにより、バネ受け45に位置決めされる。バネ受け45には、図8に於いては影になっているので示されていないが、上記孔65a、65bに対応して、円形断面の凸部が2個設けられている。尚、孔65bは凸部より僅かに大きな直径の円形状を有するが、孔65aは、孔65a、65bを結ぶ方向に平行な直線部を有する長孔であり、直線部の距離は凸部より僅かに大きくされている。これにより、孔65a、65bの間隔と2個の凸部の間隔の公差によるずれを吸収している。更に、基板63aの孔65aと孔64aの間、孔64aと孔65bの間には、後述するワイヤバネ70a、70b、70c、70dを通すための孔66a、66bと孔66c、66dが設けられている。
同様に、基板63bは、位置決め用の孔65c、65dにより、バネ受け45に固定されている。そして、バネ受け45には、基板63aと同様に凸部が2個設けられ、片方の孔65dが長孔となっている。また、基板63bの孔65cと孔64bの間、孔64bと孔65dの間には、後述するワイヤバネ70e、70f、70g、70hを通すための孔67a、67bと孔67c、67dが設けられている。
上述したバネ受け45の開口46と基板55の開口56は、走査レンズ30への入射光の光路となっている。この光路は、基板63aと63bの間を通るので、基板63a、63bには光路用の開口等は設けられていない。
図2及び図5に示されるように、可動部10と固定部43は、弾性支持部材であるワイヤバネ70a〜70hによって接続されている。ワイヤバネ70a〜70hは、例えば、ベリリウム銅で製作された直径0.15mmのものである。該ワイヤバネ70a〜70hの一端は、図7のホルダ11の孔16a〜16h(但し、16d〜16hは影になっており図示されない)、基板25の孔28a〜28hを通って、基板25に設けられている図示されないランドに半田付けされて固定されている。
可動部10にあっては、基板25によりエレベーションコイル19a〜19dは直列接続されており、その両端は基板25を介して、それぞれワイヤバネ70a、70bと70c、70dに接続されている。アジマスコイル20a、20bに関しても、基板25により直列接続されており、その両端は基板25を介して、それぞれワイヤバネ70e、70fと70g、70hに接続されている。すなわち、ワイヤバネ70aと70b、70cと70d、70eと70f、70gと70hには、それぞれ同じ信号が流れ、並列接続されていることになる。
ワイヤバネ70a〜70hの他端は、図8のバネ受け45の貫通孔47a〜47dと基板63a、63bの孔66a〜66d、67a〜67hを通され、基板63a、63bに設けられた図示されないランドに半田付けされて固定されている。
このように、可動部10は、8本のワイヤバネ70a〜70hによって、固定部43に対して、X軸方向、Y軸方向に移動可能に支持されていることになる。
ワイヤバネ70a、70bはバネ受け45の貫通孔47aに通されるが、この貫通孔47aは、Z軸方向の凹部53が形成されている側で、図示されていないがワイヤバネ70a、70bより僅かに大きい径の2つの小さな孔となっており、その部分を、それぞれワイヤバネ70a、70bが通されている。貫通孔47aには、紫外線硬化形のシリコンゲルが2つの小さな孔以外の部分に充填されている。正確には、2つの小さな孔にもシリコンゲルが流れていくが、シリコンゲルは硬化前でも粘度が高く、狭い間隙には流れにくい。そこで、手早く作業を行い、紫外線により硬化させることで、2つの小さな孔へのシリコンゲルの流れこみを防ぐことができる。
ワイヤバネ70c〜70h、バネ受け45の貫通孔47b〜47dについても、同様の構成となっている。シリコンゲルにより、ワイヤバネ70a〜70hの振動のダンピングが取られている。
尚、基板63a、63bには、図示されない電線が接続され、更に、図示されない制御基板に接続されている。エレベーションコイル19a〜19dはワイヤバネ70a〜70dを介して、アジマスコイル20a、20bはワイヤバネ70e〜70hを介して、それぞれ制御基板に接続されていることになる。
次に、図5及び図9を参照して、ヨーク部組78の構造について説明する。
図5及び図9に示されるように、鉄製のベース80aと鉄製のヨーク90は、ヨーク90のネジ穴91a、91b(図9に於いては91bは影になっており示されない)、ベース80aの孔82a、82b、ネジ87a、87bによって、ネジ止めされている。このとき、ベース80aとヨーク90は、ベース80aの孔83a、83bとヨーク90のハーフパンチ92a、92b(図9に於いては92bは影で示されない)によって作られた凸部(図9で見えている側はハーフパンチによる凹部で、凸部は同図の下側)によって位置決めされている。
上記孔83bは凸部より僅かに大きな直径を有する円形状に形成されているが、孔83aは孔83a、83bを結ぶ方向に平行な直線部を有する長孔であり、直線部の距離は凸部より僅かに大きくされている。これにより、孔83a、83bの間隔と2個の凸部の間隔の公差によるずれを吸収し、組立不能になることを防いでいる。
図9に於いて、ヨーク90の下側の部分で、ベース80aが取り付けられている面と反対側には、液晶ポリマ製のストッパ100aが、ヨーク90のネジ穴93a、93b(図9に於いては93bは影になっており示されない)、ストッパ100aの孔101a、101b、ネジ102a、102bによって、ネジ止めされている。ストッパ100aは、Y軸方向の精度のみ必要で、Z−X平面内の取り付け精度を高くする必要がなく、この方向の位置決めは孔101a、101b、ネジ102a、102bのみで、ベース80aとヨーク90のように、位置決めのために別途凸部とネジ用の孔は設けられていない。
ヨーク90には、鉄製のストッパ105a〜105dが組み込まれる。そして、ヨーク90には、上記ストッパ105a〜105dが組み込まれる位置に凹部95a〜95d(図9に於いては95c、95dは影になっており示されない)が設けられており、該凹部95a〜95d内にネジ穴96a〜96hが設けられている。一方、ストッパ105a〜105dにも、それぞれネジ用の孔107a〜107hが設けられている。
そして、ストッパ105a〜105dは、ネジ108a〜108hによって、孔107a〜107h、孔96a〜96hを介して、ヨーク90にネジ止めされている。ここで、ストッパ105a〜105dは、X軸方向には折曲部106a〜106dがヨーク90に当て付けられるようにして固定されている。また、ストッパ105a〜105dは、Y軸方向には、ヨーク90に設けられた凹部95a〜95d(図9に於いては95c、95dは影になっており示されない)に嵌め込まれる形で位置決めされている。
磁石110a〜110dは、接着によりヨーク90に固定されている。Y軸方向には、ヨーク90に設けられた凸部94a〜94d(図9に於いて94bは影になっており示されない)に当て付けられて、位置決めされている。図2に示されるように、X軸方向については、ストッパ105a〜105dの折曲部106a〜106dに当て付けられ、位置決めされている。Z軸方向については、ヨーク90との間に磁力による引力が働き、密着した形となる。磁石110a〜110dの磁極については、後述する。
また、ベース80aには、ネジ止め用のネジ穴81a〜81dと、孔86a、86bと、位置決め用の孔84a、84bと85a、85bとが設けられている。これらの説明については後述する。
このように、ベース80a、ヨーク90、磁石110a〜110d等から構成される部組をヨーク部組78と称する。
次に、図3乃至図6を参照して、2軸アクチュエータ125の構造について説明する。
図3乃至図5に示されるように、バネ部組73は、バネ受け45に設けられたネジ穴(図3乃至図5に於いては影になっており示されない)、ベース80aの孔86a、86b、ネジ115a、115bによって、ヨーク部組78にネジ止めされて固定されている。更に、部組の剛性を高めるために、両者はベース80aとバネ受け45の間に接着剤が塗布され、接着によっても固定されている。
ベース80aとバネ受け45は、バネ受け45の凸部と、ベース80aの孔85a、85bによって位置決めされている。位置決めについては、後述するベース80bと同様であるので、そちらで詳細に説明する。
ヨーク部組78とバネ部組73のY軸方向の(図5に於いて)上側には、更に、ベース80bが固定されている。ベース80bは、ストッパ100bを固定した後で、バネ受け45、ヨーク90に固定される。
バネ受け45とベース80bは、バネ受け45のネジ穴52a、52b、ベース80bの孔86c、86d、ネジ115c、115dによって、ネジ止めされている。ヨーク90とベース80bは、ヨーク90の凹部98a〜98dがY軸方向でベース80bに接し、X軸方向で凹部98a〜98dの両端に形成された凸部99a99d、99e、99f、99g、99hが、ベース80bに形成された切り欠き部113a〜113d、113e、孔113f、113g、切り欠き部113hに嵌挿されている。これらの切り欠き部113a〜113d、113e、孔113f、113g、切り欠き部113hに接着剤が塗布されて、ヨーク90とベース80bは、接着固定されている。尚、部組の剛性を高めるために、ベース80bとバネ受け45の間には接着剤が塗布され、接着によっても固定されている。
ベース80bとバネ受け45は、ベース80bの孔85c、85dとバネ受け45の凸部51a、51bによって位置決めされている。上記孔85cは凸部51aより僅かに大きな直径を有する円形状であるが、孔85dは孔85c、85dを結ぶ方向に平行な直線部を有する長孔であり、直線部の距離は凸部51bより僅かに大きくされている。これにより、孔85c、85dの間隔と2個の凸部51a、51bの間隔の公差によるずれを吸収し、組立不能になることを防いでいる。
尚、ベース80bが存在しなくとも機能的には成立するが、ベース80bを付加することによって、部組の剛性を高めると共に、切り欠き部113a〜113d、113e、孔113f、113g、切り欠き部113hによってヨーク90の開放端を固定し、ヨーク90が磁石110a〜110dの吸引力によって、変形することを防いでいる。
ベース80bには、液晶ポリマ製のストッパ100bが、ベース80bのネジ穴114a、114b、ストッパ100bの孔101c、101d、ネジ102c、102dによって、ネジ止めされている。ストッパ100bの位置決めは、上述したストッパ100aと同様である。
尚、ベース80aとベース80bは、同じ部材を共通利用して、ベース80a、80bの製作の型を削減している。そのため、ネジ穴等は、両者で必要なものが設けられており、一方だけを見た場合に、必要ない形状がある。
ヨーク90には、基板120a、120bが、ネジ123a〜123dによって、ヨーク90のネジ穴97a〜97d、該基板120a、120bに形成されたネジ用の孔121a〜121dを介してネジ止めされている。上記基板120a、120bには、図2及び図6に示されるように、Z軸方向で可動部10側(図2参照)に、基板119a、119b(図2に於いて119aは影になっており示されない)が固定されている。そして、基板119a、119bには、それぞれポジションセンサ118a、118bが半田付けされている。
上記基板119a、119bの基板120a、120bへの固定は半田付けによるものであり、基板119a、119bを用いているのは、レイアウト上、ポジションセンサ118a、118bを基板120a、120bより大きくZ軸方向で可動部10側に突出させ、スリット40a、40bに近付けたいためである。また、基板120a、120bには、図示されないが、ポジションセンサ118a、118bの微小な電流を増幅するための増幅器が搭載されている。更に、これらの増幅器が、図示されない電線を介して、図示されない制御基板に接続されている。すなわち、ポジションセンサ118a、118bは上記制御基板に接続されている。
また、図2から明らかなように、ポジションセンサ118b、可動部10、発光ダイオード58bは、Z軸方向で直線上に並んで配置されている。スリット40bは、可動部10の移動によって移動するが、ほぼその直線上にあり、発光ダイオード58bからの光は、スリット40bを通ってポジションセンサ118bに至る。可動部10の移動によってスリット40bを通った光が動き、ポジションセンサ118bによって可動部10の位置が検出される。尚、ポジションセンサ118a、スリット40a、発光ダイオード58aの関係についても同様であるので、ここでは説明を省略する。
可動部10に搭載される走査レンズ30を移動させることにより、後述するレーザダイオード148からの光の照射位置を移動させるが、照射位置が走査レンズ30の光軸に対して傾き0度の位置になる等の所望の位置となった場合にポジションセンサ118a、118bの出力が上記0度の位置を示す出力となるように、基板120a、120bはX−Y平面内での位置調整がされ、固定されている。
以上のように構成されたベース80a上に組み立てられた可動部10を動かす機構を、2軸アクチュエータ125と称する。
次に、図4及び図10を参照して、リレーレンズ部組130について説明する。
真鍮製の鏡枠131内には、レンズ132が挿入されている。図ではわかりにくいが、上記鏡枠131内には段状部136が設けられており、上記レンズ132は当て付けられている。レンズ132のX軸方向で、図10に於いて左側には、ステンレス製のスペーサ137を挟んでレンズ133、ステンレス製のバネ138が挿入され、最後に押さえ環139が取り付けられている。図では示されていないが、押さえ環319と鏡枠131にはネジ溝か形成されており、互いをねじ込むことで螺合して固定されている。レンズ132、レンズ133は、バネ138の作用により、段状部136に押圧されるように固定されていることになる。
リレーレンズ部組130が挿入される開口の径は、鏡枠136の径より僅かに大きくされている。リレーレンズ部組130は、鏡枠131に設けられたネジ穴135、本体155に形成された長孔179、ネジ180によって、本体155にネジ止めされている。
鏡枠131をX軸方向に移動させ、レンズ132、レンズ133を移動させると、本装置より照射される光のスポットの大きさが変化する。そこで、鏡枠131をX軸方向に移動させ、スポットの大きさが所定の大きさとなるように調整される。調整の際には、鏡枠131に設けられた溝134にマイナスドライバ、或いは専用の調整ジグを引っ掛け、X軸方向に移動させる。
図2に示されるように、本体155には長孔178が形成されており、上述した鏡枠131の溝134に上記工具を引っ掛けられるようになっている。また、X軸方向に移動してもネジ180が締められるように、長孔178は正円形状ではなく長穴となっている。ネジ180は、調整作業を容易に行うことができるように、スプリングワッシャ及びワッシャ付きのものとなっている。
レーザ部組145は、図4に示されるように、ガラス入りのポリフェニレンサルファイト樹脂で製作されたホルダ147、レーザダイオード148、基板146より構成されている。上記レーザダイオード148は基板146に半田付けされ、該基板146、ホルダ147は、ネジ149a、149bによって、本体155の図示されないネジ穴に共締めされるような形で固定されている。また、基板146は図示されていないが、レーザドライバ基板に接続されている。
次に、図1乃至図4を参照して、本スキャナ装置の本体部について説明する。
図1、図3及び図4に示されるように、2軸アクチュエータ125は、アルミ製の本体155に、ベース80aのネジ用のネジ穴81a〜81d、本体155に形成された孔157a〜157d(図4に於いては157aは示されない)を介して、ネジ160a〜160dによってネジ止めされている。ベース80aは、Y軸方向に本体155に形成された凸形状の台座156a〜156d(図4に於いては156aは示されない)で接するようになっている。そして、本体155のY軸方向の精度を出す部分は、台座156a〜156dのみと狭い部分で済むようになっている。
ベース80aと本体155は、ベース80aの孔84a、84bと、本体155に形成された凸部159a、159bによって位置決めされている。上記孔84aは凸部159aより僅かに大きな直径を有する円形状であるが、孔84bは孔84a、84bを結ぶ方向に平行な直線部を有する長円形状であり、直線部の距離は凸部159bより僅かに大きくされている。これにより、孔84a、84bの間隔と2つの凸部159a、159bの間隔の公差によるずれを吸収し、組立不能になることを防いでいる。
2軸アクチュエータ125は、そのY軸方向に於いて、ベース80a側に、ネジ87a、87b、115a、115bの頭頂部が突出された状態となっている。これらのネジ頭頂部を避けるために、本体155の下部には、上記ネジ87a、87b、115a、115bと対応する位置に、凹部158a〜158d(図4に於いて158aは示されない)が形成されている。
2軸アクチュエータ125を本体155に取り付ける際には、図4に於いて本体155の右側(X軸方向)から、本体155に形成された凸部161と、2軸アクチュエータ125のバネ受け45の凹部53を組み合わせるようにして、2軸アクチュエータ125を本体155に挿入する。X軸方向にて2軸アクチュエータ125が本体155に嵌挿されたところで、図4に於いて下側(Y軸方向)に2軸アクチュエータ125が移動され、2軸アクチュエータ125が本体155に設置される。
すなわち、2軸アクチュエータ125は、図4に於いて矢印Aのように移動されて、本体155内の所定の位置に設置される。2軸アクチュエータ125を本体155に挿入する際には、ネジ87a、87b、115a、115bの頭頂部の厚さ以上、つまり、図3に示される本体155の凸部161と、2軸アクチュエータ125のバネ受け45の凹部53との間隙Bが確保され、組み立てに支障がないようになっている。
本体155の凸部161には、図1乃至図4に於いて右方向(Z軸方向)よりレンズ165が接着されたガラス入りのポリフェニレンサルファイト樹脂で製作されたホルダ167が固定されている。このホルダ167は、本体155の図示されないネジ穴、ホルダ167のネジ用の孔168a、168bを介して、ネジ170a、170bによってネジ止めされている。ここで、ホルダ167と本体155は、ホルダ167に形成された凸部169a、169bと本体155の図示されない2つの穴によって位置決めされている。
図1に示されるように、本体155でホルダ167が固定されている面には、孔163a〜163dが設けられている。これらは、2軸アクチュエータ125の基板63a、63bに半田付けされているワイヤバネ70a〜70hの半田付け部分での突出部分を避けるためである。
更に、図2及び図4に示されるように、本体155の固定部175に形成された溝176には、ミラー177が接着固定されている。また、図2に於いて本体155の上側(図4に於いて本体155の左側となるX軸方向)には、図示されない穴部が設けられており、リレーレンズ部組130が挿入されている。更に、このリレーレンズ部組103の後方から、本体155の上記穴部を塞ぐようにして、レーザ部組145が取り付けられている。
こうして、レーザダイオード148から発射されたレーザ光が、レンズ132、133を通り、ミラー177で光路を曲げられ、走査レンズ30に至り、更にレンズ165を通るように配置されている。
次に、このようにして構成された本実施形態のスキャナ装置を用いた車載用測距装置の動作について説明する。
図11は、本実施形態のスキャナ装置を用いた車載用測距装置を簡略的に示した図である。
レーザダイオード148より出射されたレーザ光は、レンズ132、133を介し、ワイヤバネ70(ここでは70a〜70hをまとめて70と記す)に支持されたホルダ11の走査レンズ30を通る。この走査レンズ30は、後述するように、図11には示されないがエレベーションコイル19a〜19d及びアジマスコイル20a、20bによって、図示矢印Cのように左右方向に移動されることにより、図示矢印Dのように左右に振られる。尚、図11では、ミラー177は説明の簡単化のために省略している。
更に、走査レンズ30を通ったレーザ光は、レンズ165によって振れ幅が図示矢印Eのように拡大され、スキャナ装置より外部に照射される。照射されたレーザ光186が障害物187に当たって反射した光188は、受光レンズ189を介してフォトディテクタ190に至り、図示されない電気回路により、本車載用測距装置から障害物187までの距離が計算される。
尚、実際には、走査レンズ30は左右方向だけでなく、上下方向にも振られるので、レーザ光も上下方向にも振られる。
ここで、走査レンズ30を上下左右方向に移動させる仕組みについて、更に詳細に説明する。
図2及び図3に示されるように、エレベーションコイル19b、19d及びアジマスコイル20bは、ヨーク90に固定された磁石110b、110dに挟まれている。この部分の磁気回路を構成する部品のみを取り出して、図12として示す。
図12(a)はエレベーションコイル19b、19d、アジマスコイル20bと、ヨーク90に固定された磁石110b、110dの極性を示した図、図12(b)は(a)のF−F′線に沿った断面図である。
磁石110bの極性は、図12(b)に示されるとおりである。図12(b)に於いては、エレベーションコイル19b、19d及びアジマスコイル20bに対向するZ軸方向の磁石110b側の面の磁極で、同じ磁極を同じ方向の斜線で表している。
図12(a)に示されるように、磁石110bのZ軸方向に対向する磁石110dの対向面の磁極は、磁石110bの対向面側の磁極と逆とされている。図12では、分かりやすいように磁石110b、110dの磁極の境界を実線で表している。実際の磁石で境界の部分は、幅0.2〜0.4mmの磁極のないニュートラル領域となる。同じ磁極が隣接する境界201a、201bについては、ニュートラル領域は設けなくてもよい。
エレベーションコイル19dの辺202、203には、図示矢印G方向、H方向の磁界が及ぶ。図示矢印Gのように、磁石110bの領域205から磁石110dの領域207に向かった磁束は、ヨーク90を通る。そして、磁石110dの領域208から磁石110bの領域206に向かった磁束は、図示矢印Hのように進み、ヨーク90を通って磁石110bの領域205に戻る。
エレベーションコイル19dの辺202、203に流れる電流の向きは逆であり、及ぶ磁界の向き(図示矢印G、H)も逆であるので、発生する力の向きは同じである。力の向きは、電流の向きと磁界の向きに垂直なY軸方向となる。
エレベーションコイル19dの残りの辺209、210には、X軸方向の力が発生するが、図示矢印Gと矢印Hの磁界から受ける力の向きが逆向きとなりキャンセルするので、X軸方向に動くことはない。
エレベーションコイル19a〜19cについても、同様にY軸方向の力が発生する。エレベーションコイル19a〜19dで発生するY軸方向の力は、4つのコイルで同じ向きになるように配線される。これにより、エレベーションコイル19a〜19dに電流を流すことで、ホルダ11及びそれに取り付けられた走査レンズ30をY軸方向に移動させることができる。
アジマスコイル20bの辺213、214には、図示矢印J方向(図12(b)にて紙面の表側から裏側への方向)、図示矢印K方向(図12(b)にて紙面の裏側から表側の方向)の磁界が及ぶ。磁石110bの2つの領域と磁石110dの2つの領域及びヨーク90で、磁束が磁石の元の領域に戻るのは、エレベーションコイル19dについて述べたのと同様であるので、ここでは説明を省略する。
アジマスコイル20bの辺213、214に流れる電流の向きは逆であり、及ぶ磁界の向き(図示矢印J、K)も逆であるので、発生する力の向きは同じである。力の向きは、電流の向きと磁界の向きに垂直なX軸方向となる。
アジマスコイル20bの残りの辺215、216にはY軸方向の力が発生するが、図示矢印Jと矢印Kの磁界から受ける力の向きが逆向きとなりキャンセルするので、Y軸方向に動くことはない。
アジマスコイル20aについても、同様にX軸方向の力が発生する。アジマスコイル20a、20bで発生するX軸方向の力は、2つのコイルで同じ向きになるように配線される。これにより、アジマスコイル20a、20bに電流を流すことで、ホルダ11及びそれに取り付けられた走査レンズ30をX軸方向に移動させることができる。
本実施形態では、可動部10と固定部43を8本のワイヤバネ70a〜70hで接続すると共に、ワイヤバネ70aと70b、70cと70d、70eと70f、70gと70hを並列接続とし、それぞれ同じ信号が流されている。
ワイヤバネの直径、長さを同じとしたとき、ワイヤバネが8本の方が4本で支持するのに比べ、支持系全体でのバネ定数は大きくなり、1次の共振周波数は高くなる。実際には、必要な1次の共振周波数は4本の場合と同じなので、逆に、ワイヤバネの直径、長さを小さくすることができる。
ワイヤバネに生じる応力が大きくなると、バネ限界を超えて塑性変形したり、金属疲労でバネの破壊につながる。ワイヤバネの直径を小さくすることにより、ワイヤバネに発生する応力が小さくなるので、ワイヤバネの長さを長くして応力を小さくする必要がなくなり、装置の小型化を図ることができる。ワイヤバネの長さを小さくできることについては、直接的に装置の小型化につながる。
一方、ワイヤバネ70aと70b、70cと70d、70eと70f、70gと70hを並列接続としたことにより、全てのワイヤバネの直径が同一の場合、ワイヤバネ部分の抵抗値は半分となる。上述したように、ワイヤバネの直径を小さくすることは、応力低下には効果的であるが、ワイヤバネの抵抗値は大きくなってしまう。しかしながら、ワイヤバネを並列接続とすることによって、抵抗値を小さくでき、本実施形態のように、ワイヤバネを介してコイルに給電する際に、ワイヤバネ部分での電圧降下を抑えることが可能な、高性能な装置とすることができる。特に、駆動力を高めるため、コイルの巻数を増やし、コイル部分の抵抗値が大きい場合、全体の抵抗値を抑えるために、コイル以外の抵抗値を小さくする必要があり、有効である。
本実施形態では、8本のワイヤバネを全て2本ずつ並列接続としたが、エレベーションコイル19a〜19dを、並列接続しないワイヤバネ70aと70dに接続し、アジマスコイル20a、20bについては、3本並列接続したワイヤバネ70b、70e、70fと70c、70g、70hに接続してもよい。
この場合も、可動部10と固定部43を8本のワイヤバネ70a〜70hで接続するという機械的な構成は変わっていないので、第1の実施形態と同様にワイヤバネの直径、長さを小さくすることができ、装置の小型化を図ることができる。ワイヤバネ部分の抵抗値については、アジマスコイル20a、20bは3本並列接続しているので、抵抗値を小さくすることができる。一方、エレベーションコイル19a〜19dは並列接続していないので、抵抗値は大きくなる。
本スキャナ装置を用いた車載用測距装置を、X軸方向を地面に水平な方向、Y軸方向を地面に垂直な方向に設置した場合、レーザ光はX軸方向に移動しての照射が主となる。X軸方向に一通りの照射が終わったならば、Y軸方向の位置を変えて、再びX軸方向に移動して照射を行うというような形式で測距を行うと、X軸方向は連続動作、Y軸方向は間欠動作となる。そのため、X軸方向については、高い性能が求められ、駆動力も大きくする必要があり、アジマスコイル20a、20bは大きさ、巻数も多く、抵抗値が大きくなっている。そこで、ワイヤバネ部分の抵抗値を小さくするべく3本並列とすることで、より、抵抗値を小さくすることができる。一方、Y軸方向はあまり高い性能が求められず、エレベーションコイル19a〜19dは小さく、巻数も少なく、抵抗値が小さくなっている。そのため、ワイヤバネ部分の抵抗値は、多少大きくても問題はない。
このように、必要に応じて、ワイヤバネ部分の接続を変えることにより、必要な部分の抵抗値を下げ、より高い効果を得ることができる。
尚、本実施形態では、可動部10の位置を検出するためのポジションセンサ118a、118b、発光ダイオード58a、58bは可動部10の外に配置されているが、その何れかを可動部10内に配置しても位置を検出することができる。その際、ポジションセンサ或いは発光ダイオードヘの配線を、ワイヤバネを並列接続して行ってもよい。ポジションセンサの場合は、センサからの微少な電流を減衰させることなく伝達することができる。発光ダイオードの場合は大電流が必要であり、電圧降下を抑えることができる。
(第2の実施形態)
以下、本発明の第2の実施形態について説明する。
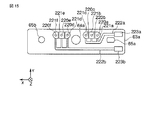
図13乃至図15は本発明の第2の実施形態を示すもので、図13は図5のスキャナ装置のバネ部組73部分に相当する分解斜視図、図14は図8の基板63aに相当する斜視図、図15は基板63aの平面図である。
尚、図13乃至図15に示される第2の実施形態に於いて、上述した図1乃至図12に示される第1の実施形態と同一の部分には同一の参照番号を付してその説明を省略する。
本第2の実施形態では、図13に示されるように、第1の実施形態と異なり、8本でなく、12本のワイヤバネ218a〜218lで、固定部45と可動部10が接続されている。第1の実施形態では、ワイヤバネは電気的に2本ずつ並列接続されていたが、本第2の実施形態では、ワイヤバネ218a〜218c、218d〜218f、218g〜218i、218j〜218lと、3本ずつが並列接続されている。
固定部43で12本のうち6本のワイヤバネ218a〜218fを半田付けする基板63aには、図14に示されるように、それに対応して、6つの孔220a〜220fが設けられている。この他の基板及びバネ受け43等でも、ワイヤバネの本数が増えたことにより、ネジ用の孔や形状が対応して変更されている。
図15に示されるように、上記基板63aに設けられた孔220a〜220fの周囲には、それぞれランド221a〜221fが設けられている。このうち、ランド221a〜221cはパターン222aを介してランド223aに接続され、ランド221d〜221fはパターン222bを介してランド223bに接続されている。それぞれのランド221a〜221f、223a及び223bの銅箔は半田メッキされ、パターン222a、222bの銅箔は絶縁樹脂でカバーされている。
また、ランド221a〜221cはそれぞれ独立しており、パターン222aによって接続されている。ランド221d〜221fについても、同様にパターン222bによって接続されている。他の詳細を図示していない基板についても、ワイヤバネ218a〜218lの半田付けをするランド部分は同様の構成となっている。
その他の構成、動作については、上述した第1の実施形態とほぼ同じであるので説明は省略する。
本第2の実施形態では、バネを12本としているので、系の1次の共振周波数を同じとすると、8本の場合より直径の小さいワイヤバネを用いることができ、ホルダの変位量が更に大きくても、ワイヤバネの応力を小さくすることができる。また、それぞれ3本ずつ並列接続としているので、ワイヤバネ部分の抵抗値を更に小さくすることもできる。
本実施形態では、ワイヤバネが3本ずつ4組に分かれて配置され、各組の中ではワイヤバネが接近している。その1組のワイヤバネ218a〜218cに注目すると、基板63aに於いて、ワイヤバネ218aはランド221aに、ワイヤバネ218bはランド221bに、ワイヤバネ218cはランド221cに独立して半田付けされる。ランドが共通の場合、ワイヤバネ218a〜218cを同時に半田付することができるが、3本のワイヤバネのうちの1本が、半田ごてで押してしまったり、半田の表面張力によってワイヤバネの長手方向に動いてしまったりして、正しく3本全てを半田付けできないことがある。本実施形態のようにワイヤバネ1本毎にランドを独立させることにより、ワイヤバネを1本、1本作業することができ、上記のような問題が生じず、作業性を向上させることができる。
以上、本発明の実施形態について説明したが、本発明は上述した実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で種々の変形実施が可能であるのは勿論である。
例えば、磁石とコイルの配置は種々のものが考えられる。上述した実施形態では、各コイルは2つの磁石で挟み込んでいたが、1つの磁石のみとしても異極着磁された磁石の表面から出て表面に戻る磁界により、同様の力を発生することができる。これにより、磁石の数を削減することができる。
また、上記実施形態では、ワイヤバネはベリリウム銅製としていたが、燐青銅製であってもよく、ステンレス製であってもよい。但し、銅合金では、ステンレスと異なり、発生応力によって繰り返し変位に対して寿命があることより、本発明の応力を小さくすることの効果を大きく得ることができる。また、ベリリウム銅であれば寿命の長い耐久性の高い装置に、燐青銅であれば安価な装置とすることができる。
光学系についても、今回の構成に限ったことではなく、種々の光学系に適用が可能である。レンズから出射されたレーザ光は、照射するレンズと異なる別のレンズで受光されるとしたが、再び同じレンズで受光し、受光した光を、例えば、光路分割素子で分離して検出するような光学系であってもよい。
更に、上述した実施形態では、2軸アクチュエータに於いて、ポジションセンサを2系統設けた例で説明したが、何れか1系統として分割して検出するようにしてもよい。
更に、上述した実施形態には種々の段階の発明が含まれており、開示される複数の構成要件の適当な組合せにより種々の発明が抽出され得る。例えば、実施形態に示される全構成要件から幾つかの構成要件が削除されても、発明が解決しようとする課題の欄で述べた課題が解決でき、発明の効果の欄で述べられている効果が得られる場合には、この構成要件が削除された構成も発明として抽出され得る。
10…可動部、11…ホルダ、19a〜19d…エレベーションコイル、20a、20b…アジマスコイル、25、55、57a、57b、63a、63b、120a、120b…基板、30…走査レンズ、35…カバー、40a、40b…スリット、43…固定部、45…バネ受け、47a〜47d…貫通孔、58a、58b…発光ダイオード、70a〜70h…ワイヤバネ、78…ヨーク部組、80a、80b…ベース、90…ヨーク、100a、100b、105a〜105d…ストッパ、110a〜110d…磁石、118a、118b…ポジションセンサ、125…2軸アクチュエータ、130…リレーレンズ部組、145…レーザ部組、148…レーザダイオード、155…本体、165…レンズ、177…ミラー。