JP4889794B2 - ウエハ搬送ロボット及びウエハの解放方法 - Google Patents
ウエハ搬送ロボット及びウエハの解放方法 Download PDFInfo
- Publication number
- JP4889794B2 JP4889794B2 JP2010019260A JP2010019260A JP4889794B2 JP 4889794 B2 JP4889794 B2 JP 4889794B2 JP 2010019260 A JP2010019260 A JP 2010019260A JP 2010019260 A JP2010019260 A JP 2010019260A JP 4889794 B2 JP4889794 B2 JP 4889794B2
- Authority
- JP
- Japan
- Prior art keywords
- wafer
- hand
- pressing
- moving
- transfer robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012546 transfer Methods 0.000 title claims description 31
- 238000000034 method Methods 0.000 title claims description 18
- 238000003825 pressing Methods 0.000 claims description 56
- 235000012431 wafers Nutrition 0.000 description 188
- 239000000758 substrate Substances 0.000 description 39
- 238000012545 processing Methods 0.000 description 29
- 239000004065 semiconductor Substances 0.000 description 14
- 239000011521 glass Substances 0.000 description 4
- 238000003860 storage Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 230000005489 elastic deformation Effects 0.000 description 2
- 230000003028 elevating effect Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- PNEYBMLMFCGWSK-UHFFFAOYSA-N aluminium oxide Inorganic materials [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 239000012636 effector Substances 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 239000012535 impurity Substances 0.000 description 1
- 238000001459 lithography Methods 0.000 description 1
- 229910052594 sapphire Inorganic materials 0.000 description 1
- 239000010980 sapphire Substances 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
Images






Landscapes
- Manipulator (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Description
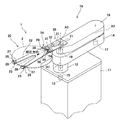
図1に示すウエハ搬送ロボット1は、半導体素子を製造する半導体処理設備内において、半導体素子の材料であるウエハ2を搬送するために利用される。ウエハ2には、半導体ウエハとガラスウエハとが含まれる。半導体ウエハには、例えばシリコンウエハ、その他の半導体単体のウエハ、及び化合物半導体のウエハが含まれる。ガラスウエハには、例えばFPD用ガラス基板、MEMS用ガラス基板、及びサファイア(単結晶アルミナ)ウエハが含まれる。半導体処理設備には、例えば熱処理、不純物導入処理、薄膜形成処理、リソグラフィー処理、洗浄処理、及び平坦化処理といった処理をウエハ2に施す複数の処理装置が設置されている。ウエハ搬送ロボット1は、これら処理装置間でウエハ2を搬送する。
ウエハ搬送ロボット1は、いわゆる水平多関節型の4軸ロボットのエンドエフェクタに、ウエハ2が載置されるハンド20を適用して成る。ウエハ搬送ロボット1は、半導体処理設備内で固定される基台11を有し、基台11には昇降軸12が設けられている。基台11が設備内で適正に設置されると、昇降軸12の軸線A1が鉛直に向けられる。以下の方向の概念は、このように基台11を設置した場合の方向に基づいている。
図2(a)に示すように、ハンド20は、平面視略矩形状の取付板21を有している。取付板21の一端部は第2アーム16の他端部に揺動可能に連結されている。取付板21は、第2アーム16の他端部から水平に延びている。
図2(a)に示すように、ウエハ搬送ロボット1は、ウエハ2を第1受け部23に押圧して第1受け部23と共にウエハ2を把持し、且つウエハ2の押圧を解除してウエハ2解放するための押圧装置30を有している。押圧装置30は、シリンダ31を有しており、シリンダ31は取付板21の上面側に配置されている。シリンダ31内にはプランジャ32が進退可能に挿入されている。シリンダ31及びプランジャ32の軸線は、平面視において対称軸線A4と重なるように設計されている。つまり、ハンド20の幅方向において一対の第1受け部23の中央に配置されている。プランジャ32の一端部には、ピストン33が設けられ、このピストン33によりシリンダ31の内部がプランジャ32側の第1空間34と、その反対側の第2空間35とに気密に区画されている。第1及び第2空間34,35は、エア供給装置36よりエアが供給され得るように構成されている。
図4はウエハ搬送ロボット1の制御系の構成を中心に示すブロック線図であり、図4中の実線は電気的接続を示し、二重線は機械的接続を示し、点線は空間的連通を示している。図4に示すように、ウエハ搬送ロボット1は、制御装置40を有している。制御装置40は、記憶部41及び演算部42を有している。記憶部41及び演算部42は、例えば、それぞれ、マイクロコンピュータのメモリ及びCPUから成る。演算部42には、オペレータにより操作される操作器45の出力と、プランジャ32のストロークを検出するストロークセンサ46の出力とが入力されている。操作器45では、例えばウエハ搬送ロボット1の起動及び停止といった指令を入力することができる。演算部42は、操作器45で起動の指令が入力されると、移動装置10及び押圧装置30にそれぞれ制御信号を出力してこれらの動作を制御するよう構成されている。
図6は、制御装置40の演算部42により実行される、ハンド20の移動、ウエハ2の把持及び解放の方法の手順を複合的に示したフローチャートである。図示するフローを繰り返すことにより、2つの処理装置3,4の間でウエハ2が繰り返し搬送されることとなる。ここでは、便宜的に、ハンド20が復路54に沿って載置位置Aへ戻っている状況下で当該フローが開始するものとしている。なお、この状況下では、プランジャ32及びプッシャ37は後退している。
2 ウエハ
10 移動装置
20 ハンド
23 第1受け部(受け部)
30 押圧装置
40 制御装置
50 移動経路
52 第2往路(第1移動経路)
53 第3往路(第2移動経路)
A 載置位置
C 点(第1移動経路の終点)
D 降ろし位置
Claims (4)
- ウエハが載置されるハンドと、
前記ハンドを、前記ウエハが載置される載置位置から載置された前記ウエハを前記ハンドから降ろす降ろし位置まで移動させるための移動装置と、
前記ハンドに載置された前記ウエハのエッジを支持するための受け部と、
前記ハンドに載置された前記ウエハを前記受け部に押圧して前記受け部と共に前記ウエハを把持し、且つ前記ウエハの押圧を解除して前記ウエハを解放するための押圧装置と、
前記移動装置の動作を制御して前記ハンドを前記載置位置から前記降ろし位置へ移動させ、且つ前記押圧装置の動作を制御して前記ウエハを把持及び解放させる制御装置と、を備えるウエハ搬送ロボットであって、
前記制御装置が、
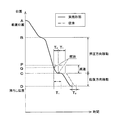
前記載置位置にて前記ウエハが載置されると前記押圧装置を制御して前記ウエハを把持し、前記移動装置を制御して前記ハンドを前記ウエハを押圧する方向に移動させながら減速して前記降ろし位置へと移動させ、且つ、前記ハンドが減速している間に、前記押圧装置を制御して前記ウエハを解放させる
ように構成されている、ウエハ搬送ロボット。 - 前記ハンドは、前記押圧装置により前記ウエハが押圧されると撓み、且つ前記ウエハの押圧が解除されるとスプリングバックを生じ、
前記ウエハが解放されてから減速が完了するまでの時間が前記ハンドの前記スプリングバックに要する時間よりも長い、請求項1に記載のウエハ搬送ロボット。 - 前記移動装置は、前記ハンドを、前記押圧装置により前記ウエハが押圧される方向に延びる第1移動経路と、前記第1移動経路の終点から前記降ろし位置へと鉛直方向に延びる第2移動経路とを含む所定の移動経路上を移動させるよう構成されており、
前記制御装置は、前記ハンドが前記第1移動経路の前記終点で減速を完了して方向転換するべく前記第1移動経路に沿って前記終点の手前で減速している間に、前記押圧装置を制御して前記ウエハを解放させるように構成されている、請求項1又は2に記載のウエハ搬送ロボット。 - ウエハが載置されるハンドと、
前記ハンドを、前記ウエハが載置される載置位置から載置された前記ウエハを前記ハンドから降ろす降ろし位置まで移動させるための移動装置と、
前記ハンドに載置された前記ウエハのエッジを支持するための受け部と、
前記ハンドに載置された前記ウエハを前記受け部に押圧して前記受け部と共に前記ウエハを把持し、且つ前記ウエハの押圧を解除して前記ウエハを解放するための押圧装置と、
を備えるウエハ搬送ロボットにおける、ウエハの解放方法であって、
前記載置位置にて前記ウエハが載置されると前記押圧装置を動作させて前記ウエハを把持し、
前記移動装置を動作させて前記ハンドを前記ウエハを押圧する方向に移動させながら減速して前記降ろし位置へと移動させ、
前記ハンドが減速している間に、前記押圧装置を動作させて前記ウエハを解放させる、
ウエハの解放方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010019260A JP4889794B2 (ja) | 2010-01-29 | 2010-01-29 | ウエハ搬送ロボット及びウエハの解放方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010019260A JP4889794B2 (ja) | 2010-01-29 | 2010-01-29 | ウエハ搬送ロボット及びウエハの解放方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011159738A JP2011159738A (ja) | 2011-08-18 |
| JP4889794B2 true JP4889794B2 (ja) | 2012-03-07 |
Family
ID=44591453
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010019260A Active JP4889794B2 (ja) | 2010-01-29 | 2010-01-29 | ウエハ搬送ロボット及びウエハの解放方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4889794B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101910804B1 (ko) * | 2016-09-12 | 2019-01-04 | 세메스 주식회사 | 이송 로봇 및 기판 픽업 방법 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5614417B2 (ja) * | 2012-01-05 | 2014-10-29 | 株式会社安川電機 | 搬送システム |
| JP5516612B2 (ja) * | 2012-01-24 | 2014-06-11 | 株式会社安川電機 | ロボットシステム |
| JP5756032B2 (ja) | 2012-01-24 | 2015-07-29 | 株式会社安川電機 | ロボットシステム |
| JP7316033B2 (ja) * | 2018-11-08 | 2023-07-27 | 株式会社Screenホールディングス | 基板搬送装置および基板搬送方法 |
| JP7364371B2 (ja) | 2019-06-28 | 2023-10-18 | 川崎重工業株式会社 | 基板搬送ロボット及び基板搬送ロボットの制御方法 |
| JP7536469B2 (ja) | 2020-02-28 | 2024-08-20 | 川崎重工業株式会社 | 基板保持ハンド及び基板移送ロボット |
| CN117878044B (zh) * | 2024-03-12 | 2024-06-04 | 四川富美达微电子股份有限公司 | 一种引线框架转移系统 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000006064A (ja) * | 1998-06-18 | 2000-01-11 | Mecs Corp | 基板搬送ロボット |
| JP2003037160A (ja) * | 2001-07-23 | 2003-02-07 | Kondo Seisakusho:Kk | ウエハ搬送用ハンド |
| JP4938560B2 (ja) * | 2007-06-22 | 2012-05-23 | 日本電産サンキョー株式会社 | 産業用ロボット |
| JP4959427B2 (ja) * | 2007-06-05 | 2012-06-20 | 日本電産サンキョー株式会社 | 産業用ロボット |
-
2010
- 2010-01-29 JP JP2010019260A patent/JP4889794B2/ja active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101910804B1 (ko) * | 2016-09-12 | 2019-01-04 | 세메스 주식회사 | 이송 로봇 및 기판 픽업 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011159738A (ja) | 2011-08-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4889794B2 (ja) | ウエハ搬送ロボット及びウエハの解放方法 | |
| KR101265830B1 (ko) | 엣지 그립 장치 및 이를 구비하는 로봇 | |
| KR102483237B1 (ko) | 기판 겹침 장치 및 기판 겹침 방법 | |
| JP6630591B2 (ja) | 基板把持ハンド及び基板搬送装置 | |
| CN102310410B (zh) | 夹持装置、输送装置、处理装置和电子设备的制造方法 | |
| JP4959427B2 (ja) | 産業用ロボット | |
| JP6368376B2 (ja) | ウエハ搬送方法及び装置 | |
| JP2000223549A (ja) | 基板搬送装置、基板搬送方法、基板搬送用ハンド機構、灰化処理装置及び灰化処理方法 | |
| JP2017183593A (ja) | ハンドユニットおよび移載方法 | |
| KR102233207B1 (ko) | 기판 파지 기구, 기판 반송 장치 및 기판 처리 시스템 | |
| JP2017175072A (ja) | 基板搬送ハンド及びロボット | |
| JP2014179508A (ja) | 基板処理装置及び基板処理方法 | |
| JP5612849B2 (ja) | エッジグリップ装置、それを備える搬送ロボット及び半導体プロセス用ウエハの解放方法 | |
| JP4511605B2 (ja) | 搬送ロボット | |
| KR102493184B1 (ko) | 기판 반송 장치 및 그 운전 방법 | |
| JP5157460B2 (ja) | エンドエフェクタ及びそれを備えた搬送装置 | |
| JP7382932B2 (ja) | 基板搬送ロボット及びその制御方法 | |
| JP5261030B2 (ja) | 半導体ウエハの搬送方法 | |
| KR100951932B1 (ko) | 진공 로봇의 웨이퍼 클램프 장치 | |
| CN113727813A (zh) | 基板搬运机器人及基板搬运机器人的控制方法 | |
| JP7478042B2 (ja) | ロボット | |
| JP2018120746A (ja) | チャック装置、及びチャック方法 | |
| CN117373994B (zh) | 用于传输晶圆的机械手以及半导体处理设备 | |
| JP2003168719A (ja) | アライメント処理方法およびアライメント処理装置 | |
| JP5447399B2 (ja) | 基板供給装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111213 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111215 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111213 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4889794 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141222 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |