JP4938560B2 - 産業用ロボット - Google Patents
産業用ロボット Download PDFInfo
- Publication number
- JP4938560B2 JP4938560B2 JP2007164948A JP2007164948A JP4938560B2 JP 4938560 B2 JP4938560 B2 JP 4938560B2 JP 2007164948 A JP2007164948 A JP 2007164948A JP 2007164948 A JP2007164948 A JP 2007164948A JP 4938560 B2 JP4938560 B2 JP 4938560B2
- Authority
- JP
- Japan
- Prior art keywords
- wafer
- gripping
- hand
- contact
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000008602 contraction Effects 0.000 claims description 28
- 230000001105 regulatory effect Effects 0.000 claims description 8
- 235000012431 wafers Nutrition 0.000 description 130
- 239000004065 semiconductor Substances 0.000 description 25
- 230000032258 transport Effects 0.000 description 14
- 230000001133 acceleration Effects 0.000 description 12
- 230000007246 mechanism Effects 0.000 description 12
- 239000007787 solid Substances 0.000 description 12
- 238000004519 manufacturing process Methods 0.000 description 7
- 230000006835 compression Effects 0.000 description 4
- 238000007906 compression Methods 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- 241000255777 Lepidoptera Species 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
Images









Landscapes
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Manipulator (AREA)
Description
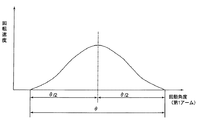
図1は、本発明の実施の形態にかかる産業用ロボット1を示す側面図である。図2は、図1に示す産業用ロボット1を示す平面図であり、(A)は多関節アーム部4が伸びている状態を示し、(B)は多関節アーム部4が縮んでいる状態を示す。図3は、図1に示す産業用ロボット1が組み込まれた半導体製造システム9の概略構成を示す平面図である。図4は、図1に示す多関節アーム部4およびハンド3内の動力の伝達機構を説明するための概略断面図である。図5は、図1に示す多関節アーム部4の伸縮状態とハンド3の向きとの関係を説明するための図である。図6は、図1に示すロボット1でウエハ2の搬出、搬入を行う際の中空回転軸16の駆動モータの速度と第1アーム7の回動角度との関係を示す図である。なお、図4では、図2(A)のE−E方向から見たときの多関節アーム部4等の概略断面を示している。
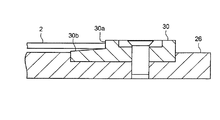
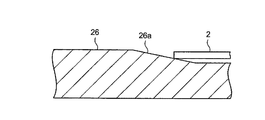
図7は、図1に示すハンド3の要部を示す平面図であり、(A)は把持部28がウエハ2から退避している状態を示し、(B)は把持部28がウエハ2を把持している状態を示す。図8は、図7に示すハンド3の要部の側面図である。図9は、図2(A)のF部の構成を側面から説明するための断面図である。図10は、図2(A)のG部の構成を側面から説明するための断面図である。なお、以下の説明では、便宜上、図7の上下方向を左右方向とし、図7の左右方向を前後方向とする。
以上説明したように、本形態では、ハンド3が、ウエハ2に当接してウエハ2を把持するための把持部28と、ウエハ2から退避させる方向へ把持部28を付勢する引張りコイルバネ29とを備えている。また、把持部28は、ウエハ2に当接してウエハ2を把持するローラ34と、多関節アーム部4の伸縮動作に伴う慣性力で、ローラ34がウエハ2に当接する方向へローラ34を移動させる重量部材35とを備えている。そのため、ローラ34と重量部材35とによる簡易な構成で、ウエハ2を把持し、また、引張りコイルバネ29による簡易な構成で、ウエハ2を解放することができる。
上述した形態は、本発明の好適な形態の一例ではあるが、これに限定されるものではなく本発明の要旨を変更しない範囲において種々変形実施が可能である。
2 ウエハ(搬送対象物)
3 ハンド
4 多関節アーム部
5 本体部
6 第2アーム(ハンド保持アーム)
10 受渡しチャンバー(収納部)
11 処理チャンバー(収納部)
28、58 把持部
29、49 引張りコイルバネ(付勢部材)
30 当接部材(当接部)
31 規制部材
34 ローラ(把持部材)
35、45 重量部材
36 レバー部材
39 圧縮コイルバネ(付勢部材)
Claims (4)
- 搬送対象物が収納される収納部からの前記搬送対象物の搬出および前記収納部への前記搬送対象物の搬入を行う産業用ロボットにおいて、
前記搬送対象物を搭載するハンドと、前記ハンドを先端側で回動可能に保持するハンド保持アームを含む2本以上のアームを有し前記収納部に対する前記搬送対象物の出し入れの際に伸縮する多関節アーム部と、前記多関節アーム部を回動可能に保持する本体部とを備え、
前記ハンドは、前記搬送対象物に当接して前記搬送対象物を把持するための把持部と、前記搬送対象物から退避させる方向へ前記把持部を付勢する付勢部材と、先端側に設けられ前記搬送対象物の端部が当接する当接部とを備え、
前記把持部は、前記搬送対象物に当接可能な把持部材と、前記多関節アーム部の伸縮動作に伴う慣性力で、前記把持部材が前記搬送対象物に当接する方向へ前記把持部材を移動させる重量部材とを備えるとともに、前記ハンド保持アーム側となる前記ハンドの基端側に配置され、
前記重量部材は、前記収納部から前記搬送対象物を搬出する際の前記多関節アーム部の伸縮動作の減速時に、前記当接部から離れようとする前記搬送対象物を前記当接部に接した状態に維持させるため、前記当接部に向かう方向でかつ前記搬送対象物に当接する方向へ前記把持部材を移動させ、前記把持部材と前記当接部とで前記搬送対象物を保持し、さらに、前記収納部へ前記搬送対象物を搬入する際の前記多関節アーム部の伸縮動作の加速時に、前記当接部から離れようとする前記搬送対象物を前記当接部に接した状態に維持させるため、前記当接部に向かう方向でかつ前記搬送対象物に当接する方向へ前記把持部材を移動させ、前記把持部材と前記当接部とで前記搬送対象物を保持する、
ことを特徴とする産業用ロボット。 - 前記ハンドは、前記付勢部材による前記把持部の付勢方向における前記把持部の動きを規制する規制部材を備えることを特徴とする請求項1に記載の産業用ロボット。
- 前記把持部は、前記把持部材と前記重量部材とを連結するとともに回動可能な略L形状のレバー部材を備え、前記把持部材は、前記レバー部材の一端側に取り付けられ、前記重量部材は、前記レバー部材の他端側に取り付けられていることを特徴とする請求項1または2に記載の産業用ロボット。
- 前記把持部材は、回動可能なローラであることを特徴とする請求項1から3のいずれか1項に記載の産業用ロボット。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007164948A JP4938560B2 (ja) | 2007-06-22 | 2007-06-22 | 産業用ロボット |
| TW097118569A TWI441719B (zh) | 2007-06-05 | 2008-05-20 | Industrial robotic arm |
| KR1020080051598A KR101423776B1 (ko) | 2007-06-05 | 2008-06-02 | 산업용 로보트 |
| CN201510639459.0A CN105269552B (zh) | 2007-06-05 | 2008-06-04 | 工业用机器人 |
| EP08010223.9A EP2033745B1 (en) | 2007-06-05 | 2008-06-04 | Industrial robot |
| US12/133,684 US8043042B2 (en) | 2007-06-05 | 2008-06-05 | Industrial robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007164948A JP4938560B2 (ja) | 2007-06-22 | 2007-06-22 | 産業用ロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009000785A JP2009000785A (ja) | 2009-01-08 |
| JP4938560B2 true JP4938560B2 (ja) | 2012-05-23 |
Family
ID=40317732
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007164948A Expired - Fee Related JP4938560B2 (ja) | 2007-06-05 | 2007-06-22 | 産業用ロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4938560B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4889794B2 (ja) * | 2010-01-29 | 2012-03-07 | 川崎重工業株式会社 | ウエハ搬送ロボット及びウエハの解放方法 |
| KR102172915B1 (ko) * | 2019-02-13 | 2020-11-02 | 주식회사 피에스디이 | 기판 이송 방법. 기판 이송 유닛 및 엔드 이펙터 |
| JP2024148634A (ja) * | 2023-04-06 | 2024-10-18 | 株式会社Screenホールディングス | 基板搬送装置の監視方法、および、基板処理装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2814167B2 (ja) * | 1992-07-17 | 1998-10-22 | 東京エレクトロン株式会社 | 処理装置 |
| JP2909362B2 (ja) * | 1993-08-31 | 1999-06-23 | 大日本スクリーン製造株式会社 | 基板保持装置 |
| US6322312B1 (en) * | 1999-03-18 | 2001-11-27 | Applied Materials, Inc. | Mechanical gripper for wafer handling robots |
-
2007
- 2007-06-22 JP JP2007164948A patent/JP4938560B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009000785A (ja) | 2009-01-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4959427B2 (ja) | 産業用ロボット | |
| TWI441719B (zh) | Industrial robotic arm | |
| JP4979530B2 (ja) | 産業用ロボット | |
| TWI398335B (zh) | Workpiece conveying system | |
| EP1037264B1 (en) | Mechanical gripper for wafer handling robots | |
| US8882430B2 (en) | Industrial robot | |
| CN104271474B (zh) | 输送设备 | |
| US9401296B2 (en) | Vacuum robot adapted to grip and transport a substrate and method thereof with passive bias | |
| US9561586B2 (en) | Articulated robot, and conveying device | |
| KR20080036072A (ko) | 불균등 링크 스카라 아암 | |
| WO2012036189A1 (ja) | 搬送装置、基板処理システム及び姿勢制御機構 | |
| JP4231552B2 (ja) | 幅広リスト・屈曲アームを有する物体移送装置 | |
| JP5913845B2 (ja) | 板状部材の搬送装置および搬送方法 | |
| JPH11288988A (ja) | アライメント高速処理機構 | |
| JP4938560B2 (ja) | 産業用ロボット | |
| US20060157998A1 (en) | Contamination-free edge gripping mechanism and method for loading/unloading and transferring flat objects | |
| US12191187B2 (en) | Dual arm with opposed dual end effectors and no vertical wafer overlap | |
| JP2013013945A (ja) | 板状部材の支持装置および支持方法、ならびに板状部材の搬送装置 | |
| JP7762607B2 (ja) | 搬送ロボット | |
| US20240379396A1 (en) | Substrate processing apparatus | |
| JP2023088620A (ja) | 産業用ロボットおよび産業用ロボットの制御方法 | |
| CN119028886A (zh) | 工业用机器人 | |
| JP2010069559A (ja) | 搬送装置及び真空装置 | |
| JPH04152078A (ja) | 多関節アーム移動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100223 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110831 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110913 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111114 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120207 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120223 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150302 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4938560 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |