JP4878062B2 - 自動車のピッチング制御装置および制御方法 - Google Patents
自動車のピッチング制御装置および制御方法 Download PDFInfo
- Publication number
- JP4878062B2 JP4878062B2 JP2009503979A JP2009503979A JP4878062B2 JP 4878062 B2 JP4878062 B2 JP 4878062B2 JP 2009503979 A JP2009503979 A JP 2009503979A JP 2009503979 A JP2009503979 A JP 2009503979A JP 4878062 B2 JP4878062 B2 JP 4878062B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- wheel
- vehicle
- acceleration
- pitch angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2036—Electric differentials, e.g. for supporting steering vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hydraulic Control Valves For Brake Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description

また、本発明の別の態様は、ピッチング制御方法であって、モータのトルクで駆動輪を駆動する自動車において、静止時の前記自動車の各車輪にかかる荷重、前記モータによる加減速時に前記自動車の各車輪にかかる荷重、並びに、ブレーキによる制動時に前記自動車の前輪に働くアンチダイブ力及び前記自動車の後輪に働くアンチリフト力によって前記自動車の各車輪にかかる荷重の変化に基づく前記自動車の重心点まわりのモーメントから前記駆動輪のノミナルピッチ角を算出するノミナルピッチ角算出ステップと、前記ノミナルピッチ角に基づき前記モータのモータトルクを算出するモータトルク算出ステップと、前記モータトルクを用いて前記モータを制御するモータ制御ステップとを有することを特徴とする。
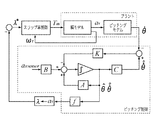
1. 実施形態1の概要
図10に、本発明の実施形態1に係るピッチング制御装置の制御システムのブロック図を示す。後述するように、ノミナルプラントPn(s)は、静止時の各車輪にかかる荷重、前記モータのトルクによる加減速時の各車輪にかかる荷重の変化に加えて、アンチダイブ力・アンチリフト力を考慮した各車輪の荷重の変化に基づいて自動車の重心点まわりのモーメントMからノミナルピッチ角θ n を算出するノミナルピッチ角算出手段として機能するようにモデル化されている。
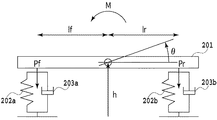
〈2・1〉ハーフカーモデル
ピッチングは車体の姿勢変化であり、車体(ばね上)のみを考慮したモデルで近似することができる。また、前後方向の運動であるため、前後二輪のモデル(ハーフカーモデル)で考えることができる。よって図2のようなハーフカーモデルで表すことができる(非特許文献4参照)。
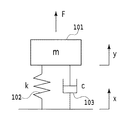
図1のような1自由度モデルの伝達関数は
伝達関数は次式のように表すことができる(非特許文献4参照)。
ピッチ運動は車両が加速・減速したときに生じる。このため加速度を考慮するために前後加速度による荷重の変化について考える。前後加速度axとしたときの定常運動中の各輪の荷重は次式のようになる(非特許文献5参照)。
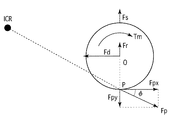
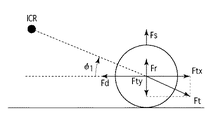
〈3・1〉インホイール型駆動の場合について図4に示す。インホイール型駆動の場合、モータはサスペンション下にあるため、アッパーアームとロアアームを介してサスペンション上から力を受ける機構となっている。この力に対して、モータの回転力が釣り合いの力として働らき、ちょうど釣り合いがとれるのは車輪の接地面であると考えられる。これより、駆動力の作用点は車輪の接地面にあると考えられる(非特許文献6参照)。この時、接地面にはFpという力が働き、Fpx、Fpyに分解することができる。水平方向の力の釣り合いを考えると、Fpx=Fdとすることができる。Fdは駆動力である。また、鉛直方向の力の釣り合いを考えた時に、Frを後輪の垂直荷重(加速時の荷重+静止時の荷重)であると考えると、
対して、図5に示すように、非インホイール型駆動(ドライブシャフト駆動)の場合、モータはサスペンション上に設置されているためサスペンション下ではモータの回転力を支える必要はない。つまりサスペンション下では偶力は発生しないので力の作用点は車輪の中心に集中する(非特許文献6参照)。これによりインホイール駆動の場合と同様に次のような式で表せる。
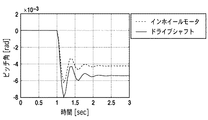
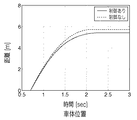
参考に、インホイール型駆動とドライブシャフト駆動それぞれの場合のオープンループにおける発進時のシミュレーションを行う。
発進時は3章で議論したインホイールモータにおけるピッチング効果を考慮することができるが、制動時はブレーキによる力が働き、モータによる力は働かないので、以下のようなブレーキ力によるアンチダイブ・アンチリフトジオメトリを考える(非特許文献7参照)。
前節までに求めたモデルのパラメータが未知であるため、同定する必要がある。そこで同定実験を行った。
実験機は市販の小型電気自動車EV−1(CQMOTORS 製Qi(QUNO))を改造し使用している。
実験条件としては、加速度axをステップ状に与えるものとし、その際にブレーキペダルの裏に固定するものを置くことにより、ブレーキ力を一定となるようにした。
Fxbをブレーキ力による駆動力、Fxmをモータによる駆動力とすると、駆動力次元においては次のような式で表すことができると仮定する。
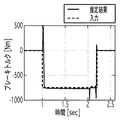
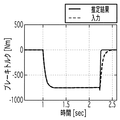
まず、オープンループの制御なしの場合と制御ありの場合の比較をシミュレーションで行った結果を図11A〜図11Dに示す。この時、CFFとCFBの閉ループ極の値をそれぞれ17rad/sec、10rad/secとした。図11A、図11Bより、ピッチ角とピッチレートはそれぞれよく抑えられていることがわかる。しかし、図11Dから、車体が停止するまでの距離がかなり伸びてしまっていることがわかる。
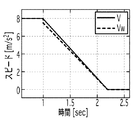
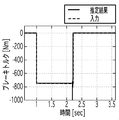
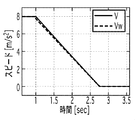
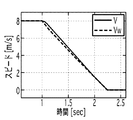
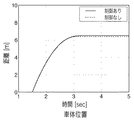
シミュレーション1の問題を解消するために、車体速度Vが1.0m/sより小さくなった時に制御をかけるシミュレーションを行った。その結果が図12A〜図12Dである。この時、CFFとCFBの閉ループ極の値をそれぞれ23rad/sec、10rad/secとした。図12Dを見ると、停止するまでの距離が制御なしの場合と比べてほぼ変わらないことがわかる。ただし、車体速度Vが1m/sより小さくなった時に制御をかけ始めるので、ピッチレートは2.04s以降のみ抑えられる。
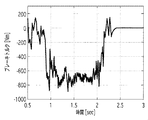
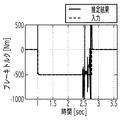
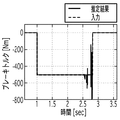
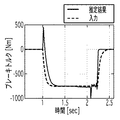
6章のシミュレーション結果について、実機検証を行った。実験における条件としては、5章における同定実験と同様に、乾燥路において一定速度から急制動をかける。その際にブレーキ力が一定となるようにした。ノミナルプラントへの入力となるブレーキ力による加速度axbは、式(21)より、加速度センサからの出力axから実プラントへの入力となるモータによる加速度axmを差し引いたものとする。CFFとCFBの閉ループ極の値はシミュレーションの場合と同じ値を用いた。その時の制御ありの場合と制御なしの場合を比較検討する。測定データは、加速度ax、
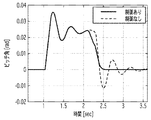
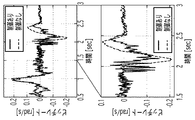
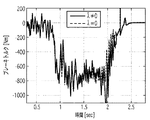
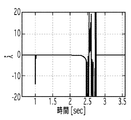
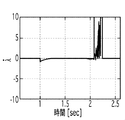
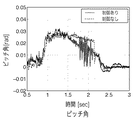
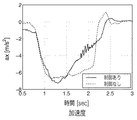
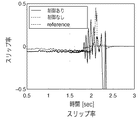
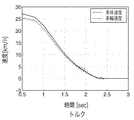
まず、6章のシミュレーション1についての実験を行った。この時の実験結果を図13A〜図13Dに示す。図13A、図13B、および図13Cは、それぞれ制御ありの場合となしの場合の角速度センサからの
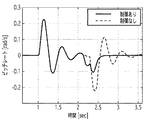
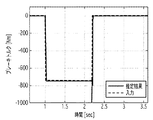
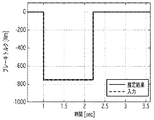
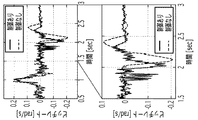
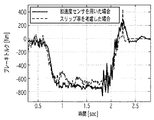
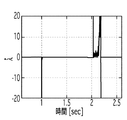
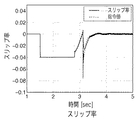
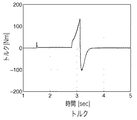
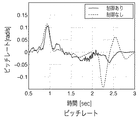
次にシミュレーション2における実機検証を行った。乾燥路で実験を行ったため、スリップは微小であると仮定して、車輪速度が約3km/hとなった時に制御を開始した。この時の実験結果を図14A〜図14Dに示す。実験1の場合と同様に、ピッチレート、ピッチ角、加速度、実トルクをそれぞれ示す。
実施形態1では、ブレーキ力による加速度axbを、加速度センサによって測定された車体の加速度ax、モータに出力する電流値に基づき算出したモータによる加速度axmから導出している。ところが、モータによる加速度axmは、より厳密には路面状態の影響も受けるので、路面状態を考慮した加速度の導出を行うことが望ましい。そこで、実施形態2では、車体の加速度axを車両の運動方程式から導出する。
実施形態2も実施形態1と同様に、力のモーメント、加速度入力ピッチレート出力の伝達関数がそれぞれ式(16)、(17)で与えられるモデルに基づいて制御を行う。実施形態2では実施形態1とは違う実験車両を用いているので、未知のパラメータは下記の実験に基づいて実施形態1の場合と同様に同定した。
実験機は市販の小型電気自動車EV−3(COMS LONG BASIC)を改造し使用している。インバータ・モータの使用は実施形態1で用いた実験車両EV−1と同じである。
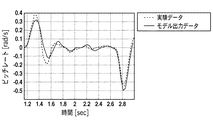
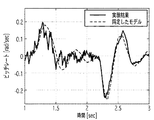
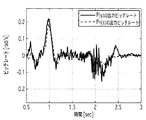
実験は、実施形態1の場合と同じ条件で行った。図17に、実験結果のピッチレートと、その時の加速度を同定したモデルに入力した時の出力ピッチレートを比較した結果を示す。同定方法として、実施形態2では時間領域において加速度の入力に対する出力がフィッティングするように伝達関数のパラメータを求めた。その伝達関数を次に示す。
〈10・1〉ノミナル加速度
上述の実施形態1では、プラントの入力となる加速度を(21)式のように、モータによる加速度とブレーキ力による加速度の和として求めていた。
しかし実際には、axmはモータによる加速度と路面状態により決定される。そこで、本発明では路面状態を考慮した加速度の算出法を提案する。
まず、以下に車両の運動方程式を示す。
式(23)からaxを求めると次のような式になる。
実施形態2ではブレーキトルク推定法として次の2つの手法を提案する。
スリップ率を考慮したブレーキトルクの推定法を提案する。
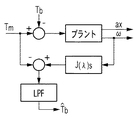
加速度センサを用いたブレーキトルクTbの推定法について示す。式(23)と式(24)から次のようにブレーキトルクを求めることができる。
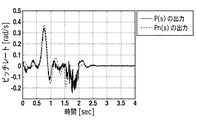
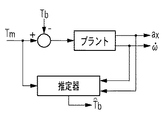
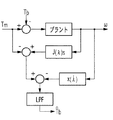
図21に、本発明の一実施形態に係るピッチング制御装置の2自由度制御系の制御システムを表すブロック図を示す。この図中のAxは図18の前後加速度推定器となる。またAxには、図19または図20の推定器からブレーキトルクTb、モータトルクTm、車輪角加速度ωdotが入力されている。この制御システムは、2章で同定した伝達関数を持つノミナルプラントPn(s)にブレーキトルクの推定値を用いたノミナル加速度axnが与えられた時に、ピッチ角を十分高いゲインを持つC1によって理想的に制御しノミナルモータトルクTmnを求める。これを実プラントP(s)にモータトルクとして適用する。実プラントがノミナルプラントと同一の時は、このノミナルモータトルクT mn により、ピッチングを抑圧することが可能となる。
前章までに示したブレーキトルク推定法・ピッチング制御法を用いて、コンピュータシミュレーションを行った。シミュレーションで用いたパラメータは、車体重量m=480kg、車輪半径r=0.22m、車輪回転部慣性モーメントJω=1.0[Nms2]、ノミナルプラントPn(s)は同定したモデル、実プラントP(s)はモデル化誤差を持たせるためにバネ、ダンパ係数をそれぞれC=2450Ns/m、K=66000N/mとした。また、制御器に関しては、C1はPD制御器、C2はPI制御器として極配置法により設計し、それぞれの閉ループ極の値を21rad/s、10rad/sとした。
次に、実際に実機を用いて実験を行った。実験で用いたパラメータは、車体重量m=480kg、車輪半径r=0.22m、ノミナルプラントのパラメータは同定した値を用いた。また、制御器に関しては、C1はPD制御器、C2はPI制御器として極配置法により設計した。今回の実験ではそれぞれの閉ループ極の値をシミュレーションと同様に21rad/s、10rad/sとした。
前章までは、スリップ率を考慮したブレーキトルクの推定法では、スリップ率の時間変化λdotは十分小さいものとし、λdot=0として推定を行っていたが、スリップ率の変化λdotの項を考慮した推定を考える。図28に、スリップ率の変化λdotを考慮したブレーキトルク推定を行うためのブロック図を示す。図28において、V>Vωの時J(λ)=Jbrake(λ)、
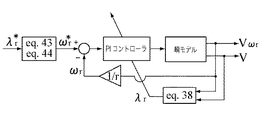
図34に、本発明の実施形態3に係るピッチング制御装置の全体の制御システムを表すブロック図を示す。実施形態3では、スリップ率制御系とピッチング制御系を分けることにより車輪の運動とピッチングの運動を別々に制御する。こうすることで、実施形態2で用いている大きなノイズが乗り易い車輪角速度ω、車輪角加速度ωdotを、ピッチング制御に用いずにすむようになる。
前後輪それぞれの車輪の回転軸周りの運動方程式は次のようになる。
実施形態2では、ブレーキトルクとノミナル加速度を求める際に車輪角加速度ωdotを用いた。しかし、モータのホールセンサの低分解能の影響により、モータの回転角速度を微分して求められる車輪角加速度は大きくノイズがのってしまう。そこで実施形態3では、ピッチング制御系のインナーループに車輪速制御に基づいたスリップ率制御系(非特許文献8参照)を組み込むことにより、ピッチング運動と車輪の運動をそれぞれ別々に制御する。これにより、ωdotを用いずに路面状態を考慮した精度の高い制御ができる。
制御対象は式(17)から、次のように表される。
ピッチング制御系から得られた目標スリップ率λ*と、車体速度より目標車輪速度を計算することができる。車体速度は、本論文ではセンサから検出できるものと仮定するが、スリップ率を推定することにより車体速度を求めてもよい(非特許文献8、10参照)。このとき、車輪速度が車体速度よりも大きくなることも考えられるので、車体速度の方が大きい場合(式(42))と車輪速度の方が大きい場合(式(43))で分ける。
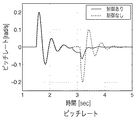
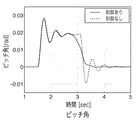
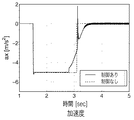
上述の第15章の車両モデル、第16章の制御系を用いてシミュレーションを行った。シミュレーションは、高μ路(ピークμ=0.9)で走行中に各輪それぞれに150Nmのブレーキトルクを与え、停止するまでを見るものとする。この時、実施形態1において常にピッチング制御を働かせると制動距離が伸びてしまうという問題があったため、スリップ率制御系は指令値をλr=−0.04として常に働かせ、車体速度が1.5m/s以下となった時からピッチング制御系から得られるスリップ率の指令値に切り替えるものとする。また、それぞれのパラメータは、Jωr=1.0Nms2、Jωf=0.5Nms2、r=0.22m、m=480kgとし、ドライビングスティフネスはDs=15000で一定値とした。
これまでに示した制御法を用いて実験を行った。実験は、高μ路(乾燥路)で約27km/h走行中に機械ブレーキにより停止するまでを見るものとする。この時、シミュレーションと同様にスリップ率制御系は指令値をλr=−0.06として常に働かせ、車体速度が1.5m/sとなった時からピッチング制御を開始する。また、パラメータはJωr=1.0Nms2、r=0.22m、m=480kgとし、ドライビングスティフネスDsは15000で一定値とした。さらに、離散化したオブザーバの極は−0.7rad/s、レギュレータの極は−6rad/sとし、スリップ率制御の極は−70rad/sで、低速域でスリップ率が振動的になってしまうという問題から、ピッチング制御開始時から−50rad/sに切り替えるものとする。
Claims (20)
- モータのトルクで駆動輪を駆動する自動車において、
静止時の前記自動車の各車輪にかかる荷重、前記モータによる加減速時に前記自動車の各車輪にかかる荷重、並びに、ブレーキによる制動時に前記自動車の前輪に働くアンチダイブ力及び前記自動車の後輪に働くアンチリフト力によって前記自動車の各車輪にかかる荷重の変化に基づく前記自動車の重心点まわりのモーメントから前記自動車のノミナルピッチ角を算出するノミナルピッチ角算出手段と、
前記ノミナルピッチ角に基づき前記モータのモータトルクを算出するモータトルク算出手段と、
前記モータトルクを用いて前記モータを制御するモータ制御手段と
を備えたことを特徴とするピッチング制御装置。 - 前記ノミナルピッチ角算出手段によって算出されたノミナルピッチ角から導出したノミナルピッチレートと前記自動車の実ピッチレートとの差分を補償するフィードバック制御手段をさらに備えたことを特徴とする請求項1に記載のピッチング制御装置。
- 前記ノミナルピッチ角算出手段は、式(A)に基づいて前記ノミナルピッチ角の算出を行うことを特徴とする請求項1又は2に記載のピッチング制御装置。
- ブレーキトルクを推定するブレーキトルク推定手段をさらに備え、
前記ノミナルピッチ角算出手段は、前記ブレーキトルクに基づき前記モータのモータ加速度を算出することを特徴とする請求項1乃至3のいずれかに記載のピッチング制御装置。 - 前記ブレーキトルク推定手段は、スリップ率を考慮した推定を行うことを特徴とする請求項4に記載のピッチング制御装置。
- 前記ブレーキトルク推定手段は、さらにスリップ率の時間変化を考慮した推定を行うことを特徴とする請求項5に記載のピッチング制御装置。
- 前記自動車の車体加速度を計測する加速度センサをさらに備え、
前記ブレーキトルク推定手段は、前記車体加速度を用いて推定を行うことを特徴とする請求項4に記載のピッチング制御装置。 - モータのトルクで駆動輪を駆動する自動車において、
前記自動車の車体の加速度を計測する加速度センサと、
前記加速度、静止時の前記自動車の各車輪にかかる荷重、前記モータによる加減速時に前記自動車の各車輪にかかる荷重、並びに、ブレーキによる制動時に前記自動車の前輪に働くアンチダイブ力及び前記自動車の後輪に働くアンチリフト力によって前記自動車の各車輪にかかる荷重の変化に基づく前記自動車の重心点まわりのモーメント、からノミナルピッチ角を算出するモデルを用いて状態オブザーバにより前記ノミナルピッチ角を含む状態変数を推定し、前記状態変数の推定値を用いた状態フィードバック制御手段と、
前記状態フィードバック制御手段で算出されたスリップ率に基づいて、前記モータのモータトルクを算出する車輪速制御手段と、
前記モータトルクを用いて前記モータを制御するモータ制御手段と
を備えたことを特徴とするピッチング制御装置。 - 前記車輪速制御手段は、車輪の慣性モーメントのみを考慮して極配置法により制御ゲインを決定し、加減速時の前記車輪の慣性モーメントに対して極が一定となるように前記制御ゲインが調整されていることを特徴とする請求項8に記載のピッチング制御装置。
- 前記ノミナルピッチ算出手段は、式(A)に基づいて前記ノミナルピッチ角の算出を行うことを特徴とする請求項8又は9に記載のピッチング制御装置。
- モータのトルクで駆動輪を駆動する自動車において、
静止時の前記自動車の各車輪にかかる荷重、前記モータによる加減速時に前記自動車の各車輪にかかる荷重、並びに、ブレーキによる制動時に前記自動車の前輪に働くアンチダイブ力及び前記自動車の後輪に働くアンチリフト力によって前記自動車の各車輪にかかる荷重の変化に基づく前記自動車の重心点まわりのモーメントから前記駆動輪のノミナルピッチ角を算出するノミナルピッチ角算出ステップと、
前記ノミナルピッチ角に基づき前記モータのモータトルクを算出するモータトルク算出ステップと、
前記モータトルクを用いて前記モータを制御するモータ制御ステップと
を有することを特徴とするピッチング制御方法。 - 前記ノミナルピッチ角算出ステップで算出されたノミナルピッチ角から導出したノミナルピッチレートと前記自動車の実ピッチレートとの差分を補償するフィードバック制御ステップをさらに有することを特徴とする請求項11に記載のピッチング制御方法。
- 前記ノミナルピッチ角算出ステップは、式(A)に基づいて前記ノミナルピッチ角の算出を行うことを特徴とする請求項11又は12に記載のピッチング制御方法。
- ブレーキトルクを推定するブレーキトルク推定ステップをさらに有し、
前記ノミナルピッチ角算ステップ段は、前記ブレーキトルクに基づき前記加速度を算出することを特徴とする請求項11乃至13のいずれかに記載のピッチング制御方法。 - 前記ブレーキトルク推定ステップは、スリップ率を考慮した推定を行うことを特徴とする請求項14に記載のピッチング制御方法。
- 前記ブレーキトルク推定ステップは、さらにスリップ率の時間変化を考慮した推定を行うことを特徴とする請求項15に記載のピッチング制御方法。
- 加速度センサで前記自動車の車体の加速度を計測する加速度計測ステップをさらに有し、
前記ブレーキトルク推定ステップは、前記加速度を用いて推定を行うことを特徴とする請求項14に記載のピッチング制御方法。 - モータのトルクで駆動輪を駆動する自動車において、
加速度センサで前記自動車の車体の加速度を計測する加速度計測ステップと、
前記加速度、静止時の前記自動車の各車輪にかかる荷重、前記モータによる加減速時に前記自動車の各車輪にかかる荷重、並びに、ブレーキによる制動時に前記自動車の前輪に働くアンチダイブ力及び前記自動車の後輪に働くアンチリフト力によって前記自動車の各車輪にかかる荷重の変化に基づく前記自動車の重心点まわりのモーメント、からノミナルピッチ角を算出するモデルを用いて状態オブザーバにより前記ノミナルピッチ角を含む状態変数を推定し、前記状態変数の推定値を用いた状態フィードバック制御ステップと、
前記状態フィードバック制御ステップで算出されたスリップ率に基づいて、前記モータのモータトルクを算出する車輪速制御ステップと、
前記モータトルクを用いて前記モータを制御するモータ制御ステップと
を有することを特徴とするピッチング制御方法。 - 前記車輪速制御ステップは、車輪の慣性モーメントのみを考慮して極配置法により制御ゲインを決定し、加減速時の前記車輪の慣性モーメントに対して極が一定となるように前記制御ゲインが調整されていることを特徴とする請求項18に記載のピッチング制御方法。
- 前記ノミナルピッチ角算出ステップは、式(A)に基づいて前記ピッチ角の算出を行うことを特徴とする請求項18又は19に記載のピッチング制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009503979A JP4878062B2 (ja) | 2007-03-05 | 2008-03-04 | 自動車のピッチング制御装置および制御方法 |
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007054614 | 2007-03-05 | ||
| JP2007054614 | 2007-03-05 | ||
| JP2007213184 | 2007-08-17 | ||
| JP2007213184 | 2007-08-17 | ||
| JP2009503979A JP4878062B2 (ja) | 2007-03-05 | 2008-03-04 | 自動車のピッチング制御装置および制御方法 |
| PCT/JP2008/053877 WO2008111436A1 (ja) | 2007-03-05 | 2008-03-04 | 自動車のピッチング制御装置および制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2008111436A1 JPWO2008111436A1 (ja) | 2010-06-24 |
| JP4878062B2 true JP4878062B2 (ja) | 2012-02-15 |
Family
ID=39759379
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009503979A Expired - Fee Related JP4878062B2 (ja) | 2007-03-05 | 2008-03-04 | 自動車のピッチング制御装置および制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20100094495A1 (ja) |
| JP (1) | JP4878062B2 (ja) |
| WO (1) | WO2008111436A1 (ja) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5171594B2 (ja) | 2008-12-15 | 2013-03-27 | 日立建機株式会社 | 電動車両及びそのピッチング制御装置 |
| JP5204073B2 (ja) | 2009-09-30 | 2013-06-05 | 三菱重工業株式会社 | 電動車両用制御装置、並びに、これを備えた電動車両及びフォークリフト |
| JP5319587B2 (ja) * | 2010-03-25 | 2013-10-16 | ニチユ三菱フォークリフト株式会社 | 産業車両 |
| JP5405440B2 (ja) * | 2010-11-15 | 2014-02-05 | 日立建機株式会社 | 電気駆動車両 |
| JP5562277B2 (ja) | 2011-03-07 | 2014-07-30 | Ntn株式会社 | 電気自動車 |
| JP5562276B2 (ja) | 2011-03-07 | 2014-07-30 | Ntn株式会社 | 電気自動車 |
| FR2982822B1 (fr) * | 2011-11-22 | 2014-08-01 | Messier Bugatti Dowty | Procede de gestion du freinage d'un aeronef permettant de limiter son tangage |
| JP5824406B2 (ja) * | 2012-04-20 | 2015-11-25 | 日立建機株式会社 | 電気駆動車両 |
| RU2568047C1 (ru) * | 2012-05-14 | 2015-11-10 | Ниссан Мотор Ко., Лтд. | Устройство управления транспортного средства и способ управления транспортным средством |
| KR101449112B1 (ko) * | 2012-08-10 | 2014-10-08 | 현대자동차주식회사 | 전기 자동차의 모터 토크 제어를 이용한 노면 요철 통과 시 발생하는 파워 트레인의 진동 저감 |
| KR101338463B1 (ko) * | 2012-11-23 | 2013-12-10 | 기아자동차주식회사 | 하이브리드 차량의 시동 제어 방법 및 시스템 |
| US9145287B2 (en) * | 2013-02-15 | 2015-09-29 | Sumitomo Heavy Industries, Ltd. | Motor drive apparatus for electric forklift and electric forklift adopting the same |
| JP6531946B2 (ja) * | 2015-10-09 | 2019-06-19 | 日立オートモティブシステムズ株式会社 | 電動車両の制御装置、電動車両の制御システム及び電動車両の制御方法 |
| US10029729B2 (en) * | 2016-03-15 | 2018-07-24 | GM Global Technology Operations LLC | Systems and methods for corner based reference command adjustment for chassis and active safety systems |
| JP6879467B2 (ja) * | 2017-10-05 | 2021-06-02 | トヨタ自動車株式会社 | 車両用制動力制御装置 |
| CN110954852B (zh) * | 2018-09-27 | 2022-05-17 | 迈来芯电子科技有限公司 | 传感器设备、系统以及相关方法 |
| CN112297747B (zh) * | 2020-11-02 | 2021-12-17 | 合肥工业大学 | 一种用于四轮驱动乘用车的纵倾角振动控制装置 |
| FR3129474A1 (fr) * | 2021-11-23 | 2023-05-26 | Aml Systems | Method and system for estimating a total pitch angle of a motor vehicle. |
| CN114228509B (zh) * | 2021-12-29 | 2024-05-28 | 臻驱科技(上海)有限公司 | 一种车辆电机的驻坡控制方法、系统及车辆 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6212305A (ja) * | 1985-07-06 | 1987-01-21 | Toyota Motor Corp | 電気自動車のピツチング抑制装置 |
| US5501111A (en) * | 1990-12-09 | 1996-03-26 | Kistler Instrumente Ag | Force sensor systems especially for determining dynamically the axle load, speed, wheelbase and gross weight of vehicles |
| DE19615737A1 (de) * | 1996-04-20 | 1997-10-16 | Daimler Benz Ag | Aktives Federungssystem |
| DE60022737T8 (de) * | 2000-04-17 | 2006-06-08 | Robert Bosch Gmbh | Vorrichung und Verfahren zur Bestimmung von Fahrzeugbetriebs-und Dynamikparametern |
| US7109856B2 (en) * | 2000-09-25 | 2006-09-19 | Ford Global Technologies, Llc | Wheel lifted and grounded identification for an automotive vehicle |
| EP1483129A1 (de) * | 2002-03-13 | 2004-12-08 | DaimlerChrysler AG | Vorrichtung zum bereitstellen von grössen |
| DE10358335B3 (de) * | 2003-12-12 | 2005-05-25 | Siemens Ag | Bestimmung von dynamischen Achslasten und/oder Radlasten eines Radfahrzeuges |
| JP4172391B2 (ja) * | 2003-12-24 | 2008-10-29 | 株式会社デンソー | 車両統合制御システムおよびプログラム |
| JP2005348497A (ja) * | 2004-06-02 | 2005-12-15 | Nissan Motor Co Ltd | 電動車両の制動時駆動力制御装置 |
| JP2006060936A (ja) * | 2004-08-20 | 2006-03-02 | Denso Corp | 車両挙動制御システム |
| JP4471103B2 (ja) * | 2004-10-07 | 2010-06-02 | トヨタ自動車株式会社 | 車両の制駆動力制御装置 |
| JP4557157B2 (ja) * | 2005-02-02 | 2010-10-06 | 三菱自動車工業株式会社 | 電気自動車の車両制御装置 |
| US7416189B2 (en) * | 2005-02-17 | 2008-08-26 | Spartan Motors Chassis, Inc. | Vehicle ride control system |
| US7600826B2 (en) * | 2005-11-09 | 2009-10-13 | Ford Global Technologies, Llc | System for dynamically determining axle loadings of a moving vehicle using integrated sensing system and its application in vehicle dynamics controls |
| US7962256B2 (en) * | 2006-08-11 | 2011-06-14 | Segway Inc. | Speed limiting in electric vehicles |
| US20090187324A1 (en) * | 2008-01-23 | 2009-07-23 | Jianbo Lu | Vehicle Stability Control System and Method |
| DE102009001306A1 (de) * | 2009-03-03 | 2010-09-09 | Robert Bosch Gmbh | Verfahren zur Stabilisierung eines Kraftfahrzeugs, insbesondere eines einspurigen Kraftfahrzeugs |
| JP4968297B2 (ja) * | 2009-09-04 | 2012-07-04 | トヨタ自動車株式会社 | 移動体、移動体の制御方法、及びプログラム |
-
2008
- 2008-03-04 US US12/530,115 patent/US20100094495A1/en not_active Abandoned
- 2008-03-04 JP JP2009503979A patent/JP4878062B2/ja not_active Expired - Fee Related
- 2008-03-04 WO PCT/JP2008/053877 patent/WO2008111436A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| US20100094495A1 (en) | 2010-04-15 |
| WO2008111436A1 (ja) | 2008-09-18 |
| JPWO2008111436A1 (ja) | 2010-06-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4878062B2 (ja) | 自動車のピッチング制御装置および制御方法 | |
| US11021068B2 (en) | Vehicle control device and control method | |
| CN105764739B (zh) | 电动车辆的控制装置以及电动车辆的控制方法 | |
| JP5445532B2 (ja) | 車両制御装置、車両制御プログラム、および車両制御方法 | |
| CN107206914B (zh) | 电动车辆的控制装置以及电动车辆的控制方法 | |
| JP5339121B2 (ja) | スリップ率推定装置及びその方法と、スリップ率制御装置及びその方法 | |
| WO2012026441A1 (ja) | 車体振動推定装置およびこれを用いた車体制振制御装置 | |
| JP4538642B2 (ja) | スリップ率推定装置およびスリップ率制御装置 | |
| US5726886A (en) | Moving object controller containing a differential of acceleration measurer | |
| CN109070763B (zh) | 电动车辆的控制方法以及电动车辆的控制装置 | |
| JP5652053B2 (ja) | 車体振動推定装置およびこれを用いた車体制振制御装置 | |
| US11648933B2 (en) | Method for controlling wheel slip of vehicle | |
| JP6616158B2 (ja) | スリップ制御装置 | |
| JP5652055B2 (ja) | 車体振動推定装置およびこれを用いた車体制振制御装置 | |
| JP4754766B2 (ja) | 車両制御方法及び車両制御装置 | |
| JP7158456B2 (ja) | 走行制御システム及び走行制御方法 | |
| JP5652054B2 (ja) | 車体振動推定装置 | |
| JP2020058156A (ja) | モーター制御装置 | |
| JP4936552B2 (ja) | スリップ率推定装置及びスリップ率制御装置 | |
| JP6267440B2 (ja) | 車両制御装置 | |
| US20210039651A1 (en) | Method for controlling wheel slip of vehicle | |
| Viehweider et al. | Electric vehicle lateral dynamics control based on instantaneous cornering stiffness estimation and an efficient allocation scheme | |
| KR20210014822A (ko) | 차량의 휠 슬립 제어 장치 및 제어 방법 | |
| Fujimoto et al. | Pitching control method based on quick torque response for electric vehicle | |
| JP2008049996A (ja) | 車両の運動制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110304 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110304 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111104 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111124 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141209 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |