従来から、各種の切削装置や研磨装置などの工作機械或いは工場設備から排出される作業用のクーラントや潤滑剤等を含む工場廃液、または一般のオフィスや一般家庭から消費生活活動の結果として排出される生活廃液は、そのまま河川等に放出することはなく、放出前に環境に配慮した廃水処理が行われている。これらの工場廃液及び生活廃液等の中には、汚泥、固形物、及び化学物質等の多くの不純物が含まれていることがあり、河川の水質汚濁の要因となったり、悪臭や待機汚染等の要因となるものがあった。そのため、生態系を破壊したりするなど、自然環境を著しく悪化させることがあったり、公害を引きおこし、人間の健康を直接損なうおそれがあるなど、有害な成分が多数混在していることがある。そのため、国や各地方自治体では、これらの工場廃液等を河川や土壌等に直接排出することを規制し、排出の際には予め定めた基準値以下に処理されたものを排出するような明確な基準を条例等によって定めている。
一方、工場などから排出される工場廃液等の中には、濾過などの処理を経ることで、再び資材として有効に活用可能な、すなわち、リサイクル可能な素材(資材)を多く含むことがあり、コスト等の削減の点からも、排出前にこれらを回収し、再利用のための処理を行うことがあった。ここで、濾過等の分離処理を行う装置として、例えば、遠心力の原理を利用して、廃液に含まれる各成分の比重差に基づいて、固体及び液体にそれぞれ分離することのできる遠心分離装置を利用することがある。
遠心分離装置の一般的な構成を示すと、例えば、開口部を下方に向けた略円錐状の回転体(ボウル)と、該回転体を筒軸周りに高速で回転させる回転機構と、回転体の内部に処理対象となる処理液(懸濁液)を供給し、高速回転状態の回転体の内壁面に向かって勢いよく噴霧(吐出)する噴霧部等の構成を主に備えるものが知られている。これにより、噴霧された懸濁液は、高速で回転する回転体の内壁面に到達すると、回転体の回転によって遠心力を受けることになる。つまり、回転体の内壁面に沿って回転体の外周方向に向かって移動しようとする力が強く作用する。このとき、処理液中の比重の高い成分は、該遠心力による作用を受けやすく、一方、比重の低い成分は、比重の高い成分よりも遠心力の影響を受ける傾向が小さい。
その結果、回転体の内部、特に内壁面の近傍では、比重の違いによって各成分が分離され、各々の領域を形成することとなる。このとき、高い比重の成分が、回転体の遠心力によって常に外方向に向かう力を受けるが、回転体の内壁面に到達した後はその力による移動が内壁面によって制限されることになる。そのため、該内壁面に高い比重成分の物質が徐々に堆積することとなる。
そして、この高比重成分から主に構成される堆積層の層厚が所定の値(最大層厚許容値)に到達すると、遠心分離装置の回転を一端停止し、主に固体物からなる高比重成分の堆積層を、例えば、スクレーパと呼ばれる掻取り用の板状部材を利用して回転体の内壁面から剥離させ、開口部の下方に相対するように設けられた回収用の筐体(回収部)の内部に回収する。なお、堆積層を構成する固形状の物体を、“スラッジ”と呼称することもある。
一方、回転体の遠心分離作用によって分離された比重の低い成分(主に液体成分)は、前述の堆積層によって内壁面に達することが困難なため、徐々に回転体の上方に向かって移動する。そして、回転体の上面に予め開口した回収口から回転体の外部に導かれ、回収されることとなる。ここで、回収口は一般的に回転体の内壁面よりも内周側に設けられることが多い。その結果、分離対象の懸濁液(処理液)の比重の違いを利用して、低比重成分及び高比重成分を遠心分離し、低比重成分のみを回転体から回収し、一方、回転体の内壁面に堆積した高比重成分は、下方に開口した回転体の開口部からスクレーパを利用して掻取処理を行い、回収することが行われる。これにより、処理液を物理的に分離することができる。また、回収された高比重成分は、主に汚泥などの固体物であるため、埋め立てなどの処理がされることが多い。
その結果、従来の化学薬品を利用して処理する化学的浄化処理方法、微生物などを利用する生物学的浄化処理方法、或いはフィルター材や吸着材を利用して固体物などを捕集する濾過吸着浄化処理方法と比べ、処理に係る手間や条件の管理が容易であるため、この遠心分離装置は多くの工場などで広く利用されている。加えて、化学薬品等や微生物などを利用することがないため、分離処理の作業に危険性を伴うことを回避することができ、さらに、濾過材や吸着材などの消耗品のコストをほとんど必要としない点においても優れた装置と言うことができる。また、本願出願人等によって、比重の異なる複数の成分から構成された懸濁液を、遠心力を与える回転体の回転数を増加させることなく効率的に分離することが可能な遠心分離装置の開発も行われている(特許文献1参照)。
しかしながら、上述した遠心分離装置は、下記に示すような問題を生じることがあった。すなわち、懸濁液に遠心力を与えるための回転体は、一般に開口部を下方に向けた状態で設置されており、この状態のままで回転体の内壁面を清掃することは困難であった。すなわち、スクレーパによって堆積層を掻取った場合でも、回転体の内壁面には堆積層の一部(スラッジ)が付着していることがある。そのため、これらの付着物を完全に除去しようとする場合、作業員は、回転体の下方に潜込むような無理な姿勢を強いられながら清掃作業を行う必要があった。
また、回転体を回転させると、比重の低い成分は回転体の内壁面を徐々に伝わって上方に移動する性質を有している。しかしながら、回転体の上方には、回転軸等の回転体を高速で軸回転させるための複雑な回転機構が設けられおり、上方に移動するにつれてミスト化(霧化)した低比重の液体成分(主に、水成分)がこれらの機構に接触することは、回転機構部の回転を不安定化させたり、サビなどの故障の発生を引き起こす可能性があった。そのため、回転機構部にこれらの水成分等が付着しないような対策を講じる必要があるものの、従来の遠心分離装置にはこのような付着防止機能を備えるものはほとんどなかった。
加えて、従来の遠心分離装置は、装置自体の稼働開始及び稼働停止の判断が、主に作業者の意志或いは感覚による主観的な判断、或いはタイマーのような稼働開始からの経過時間に基づいた画一的な判断に基づいて行われることが多かった。そのため、遠心分離の対象となる懸濁液に含まれる成分よっては、回転体の内壁面への高比重成分の付着が著しく速く進行し、タイマー等による稼働停止制御の前に既に分厚い堆積層が形成され、回転体の内空間に内壁面から離間するように配置されたスクレーパの一部と接触する可能性があった。この場合、堆積層の上層のみをスクレーパによって常に掻取り続けることとなり、回転体の高速回転を阻害する要因ともなっていた。また、堆積層の付着が継続することによって、スクレーパを回転中心方向に押圧する力が加わり、スクレーパが変形するようなおそれもあった。そこで、稼働停止のタイミングを従来の作業者の意志による主観的(経験的)なものや、或いはタイマー等の画一的なものではなく、堆積層の付着状況に応じて設定可能な遠心分離装置の開発が望まれていた。
加えて、従来の遠心分離装置は、遠心分離された高比重成分から主としてなる堆積層は、回転体の内壁面からスクレーパによって掻取って回収することが行われていた。しかしながら、分離直後の堆積層は、水などの低比重成分が多く残存していることがあり、これらをそのまま回収することは、重量物を搬送することとなり、輸送コストが増加したり、或いは埋め立て等に再利用する場合には、乾燥処理を必要とすることがあった。そのため、回収する堆積層の嵩をできるだけ小さくし、かつ軽量化するような試みが望まれていた。
そこで、本発明は、上記実情に鑑み、回転体及び回転機構部に対する清掃やメンテナンス作業を容易にするとともに、回転機構部へのミストの進入を防ぎ、かつ稼働停止のタイミングを検知し、遠心分離装置の停止制御を行うことが可能な遠心分離装置、及び回収する堆積層の嵩高さを可能な限り小さくし、減容化及び軽量化した状態で回収可能な遠心分離装置の制御方法の提供を課題とするものである。
上記の課題を解決するため、本発明の遠心分離装置は、「開口部を下方に向けて配設された略ボウル状の回転体と、前記回転体の上面と一端が連結された回転軸及び前記回転軸を軸方向に回転させ、前記回転体の内空間に遠心力を発生させるための駆動用モータを有する回転機構部と、遠心分離の対象となる異なる比重成分の混在した懸濁液を圧送する懸濁液送液手段と接続され、前記回転体の前記内空間に前記回転体の上方から前記回転軸に沿うようにして供給する懸濁液供給管、及び前記懸濁液供給管と接続し、前記内空間に吐出口が設けられたノズルを有し、前記回転機構部によって回転する前記回転体の前記内空間に対して前記懸濁液を吐出する懸濁液吐出部と、前記回転体の内壁面の形状と少なくとも一部が略一致するスクレーパ端部を有し、前記回転体による遠心分離によって前記内壁面に堆積した前記懸濁液の堆積層を掻取り可能なスクレーパ、前記回転体の下方から前記開口部を介して前記内空間に挿入され、前記スクレーパを前記内空間に支持するスクレーパ支持アーム、及び前記スクレーパ端部を前記内壁面に近接させ、前記堆積層を掻取り、剥離させる剥離位置及び前記内壁面から離間した離間位置の間で変位させるスクレーパ変位部を有するスクレーパ剥離機構部とを具備する遠心分離装置であって、前記回転機構部は、前記回転軸が前記駆動用モータ及び前記回転体とそれぞれ脱着可能に形成され、前記回転軸及び前記回転体を上方から一体化した状態で取外し可能に形成され、前記スクレーパ剥離機構部は、前記スクレーパに対する圧力を検知する圧力検知センサをさらに具備し、前記スクレーパ変位部によって、前記堆積層の最大許容層厚に一致する距離に前記内壁面から離間させた前記離間位置に前記スクレーパを変位させ、前記回転体の前記内壁面に前記堆積層が堆積し、前記最大許容層厚に達すると、該堆積層と前記スクレーパとが接触し、前記スクレーパを前記回転体の中心方向に押圧する動きを前記圧力検知センサによって検知し、前記回転体の駆動及び前記懸濁液の供給を停止制御する」ものから主に構成されている。
ここで、略ボウル状を呈する回転体とは、一般に金属製の素材で形成され、円錐形、截頭円錐形、あるいはすり鉢形のような態様で形成されているものを例示することができる。そして、一部に広径の開口部を有し、内部に液体や気体等を収容可能な内部空間(内空間)を有して形成され、開口部から外周方向に拡径するように形成されているものもある。そして、本発明の遠心分離装置は、係る回転体の開口部を下方に向けた状態、換言すると、設置床面に対して開口部を対向させた状態で配され、連結された回転機構部の回転軸に従って高速で回転することができる。ここで、回転体の回転速度(或いは回転数)は、処理対象の懸濁液の性状(粘度等)及び分離効率に応じて適宜設定することが可能であるが、一例を挙げると、回転体を5500rpmの回転数で回転させることにより、回転体の内壁面では約6000Gの遠心力を生じさせることも可能である。
さらに、回転体に連結された回転機構部は、回転軸及び駆動用モータ以外の構成として、例えば、該回転軸を略垂直方向に沿って軸支可能な軸受部と、回転軸及び軸受全体を包含し、カバーする軸カバー等の構成を有している。なお、これらの回転機構部の主たる構成は、既存の遠心分離装置、或いはその他回転機構を有する装置において利用されている周知の回転機構技術を応用することが可能である。
一方、スクレーパ剥離機構部とは、回転体の内空間に収容されたスクレーパによって回転体の内壁面に堆積した堆積層を物理的に掻取り、除去するものである。なお、掻取られた剥離層を構成する比重の高い成分は、開口部の下方に設けられた回収部に落下し、回収される。
したがって、本発明の遠心分離装置によれば、上記構成によって比重の異なる複数の成分からなる懸濁液が高速で回転する回転体の内空間に導入され、該回転体 によって生じる遠心力の作用を受けた懸濁液は、比重の違いに基づいて各々分離されることになる。ここで、回転体を回転させる回転機構部の回転軸が、本発明 の遠心分離装置では、駆動用モータ及び回転体とそれぞれ脱着可能に形成されている。すなわち、回転機構部や回転体は、高速で回転するためのその使用が激し く頻繁に部品等を交換する必要がある。そこで、回転軸及び回転体を脱着可能と形成することにより、不具合等が発生した場合の部品の交換を容易に行うことが 可能となる。さらに、回転軸及び回転体を上方に一体化して取り外すこともできる。ここで、回転体の下方は、掻取った剥離層等のスラッジを回収するための回 収部が設けられ、スクレーパを変位させるためのスクレーパ剥離機構部などの複雑な構成が設置されている。そのため、回転体を取り外そうとする場合、これら の構成が邪魔となり、極めて困難となる。そこで、本発明の遠心分離装置によれば、ベアリングケース等に収容された回転軸及び該回転軸と接続した回転体を遠 心分離装置の上方に向かって引き上げるように取外すことにより、回転体の内壁面への清掃作業を簡易に行うことができるようになる。また、高速回転により酷 使される回転軸等の回転機構部に対する交換及びメンテナンス作業も容易となり、作業性が向上し、作業者に対して過酷な労働を強いることがない。さらに、本発明の遠心分離装置によれば、スクレーパに対する圧力を検知可能な圧力検知センサを設けることにより、スクレーパと堆積した堆積層との接触 が検知可能となる。これにより、堆積層が分厚く付着し、遠心力による分離作用の低下した状態の回転体となった遠心分離装置の稼働を停止し、スクレーパに よって堆積層を掻取り、分離効率を元の状態に復帰させた状態で、再び高速で回転体を回転させることにより、遠心力を利用した分離処理を効率的に行うことが 可能となる。さらに、堆積層によってスクレーパが回転体中心方向に押し付けられたときは、すぐに回転を停止する制御がなされるため、スクレーパに無理な力 が長時間にわたって継続され、スクレーパの変形させるような強い力が作用することがない。これにより、スクレーパの破損等の問題は回避することができる。 これにより、安定した分離効率で懸濁液の遠心分離を行うことが可能となる。
さらに、本発明の遠心分離装置は、上記構成に加え、「前記回転機構部は、前記駆動用モータによって回転する前記回転体の前記内壁面に沿って上昇し、かつ前記回転軸に沿ってさらに上にのぼろうとするミスト化した低比重の成分を、下方に押戻す気流を発生させる気流発生手段を」を具備するものであっても構わない。
ここで、気流発生手段とは、例えば、回転軸に複数枚の羽根を取付け、該回転軸の回転に従って羽根によって回転体方向への風(気流)を発生させるもの、或いはエアーポンプ等を利用し、該エアーポンプの吹出口を回転軸或いはその近傍に取付けたものであっても構わない。
したがって、本発明の遠心分離装置によれば、回転体の内壁面に沿って上昇し、かつ回転軸に沿ってさらに上にのぼろうとする傾向のあるミスト化した低比重の成分を、発生させた気流によって下方に押戻すことが可能となる。その結果、回転体の上方に向かって上昇しようとするミスト(低比重成分)は、回転体上面部を側方に沿って移動することとなる。これにより、回転機構部とミスト等の接触が回避され、サビなどの不具合の発生が抑えられる。
さらに、本発明の遠心分子装置は、上記構成に加え、「前記回転体の前記内壁面に対する前記スクレーパのスクレーパ角度は、100°以上、150°以下に設定されている」ものであっても構わない。
したがって、本発明の遠心分離装置によれば、スクレーパの回転体の内壁面に対するスクレーパ角度が、100°以上、150°以下、さらに好ましくは、115°以上、125°以下に設定される。ここで、スクレーパ角度が100°よりも小さい場合、スクレーパと回転する回転体の内壁面との間に堆積層が徐々に溜まり、所謂「くい込み」の状態となることがある。その結果、回転体の円滑な回転が阻害されることがあり、スクレーパが堆積層によって変形する可能性も高くなる。一方、150°よりも大きなスクレーパ角度に設定すると堆積層の表面のみを掻取る(削り取る)こととなり、回転体の内壁面から完全に堆積層を掻取ることができない可能性が高くなる。すなわち、スクレーパによる掻取り効率が著しく低下することが予想される。そこで、上記数値の範囲にスクレーパ角度を設定することにより、堆積層を安定した状態で掻取ることが可能となる。
一方、本発明の遠心分離装置の制御方法は、「上述した遠心分離装置を利用した遠心分離装置の制御方法であって、回転機構部及び懸濁液吐出部を連動させ、回転体の内空間に懸濁液を吐出し、内壁面に前記懸濁液から遠心力によって分離された堆積層を堆積させる遠心分離工程と、前記内壁面に堆積した前記堆積層がスクレーパと接触し、前記スクレーパに対する圧力を検知する圧力検知工程と、前記スクレーパに対する圧力が検知されると、前記懸濁液の吐出を停止する懸濁液停止工程と、前記懸濁液吐出部による前記懸濁液の吐出を停止した状態で前記回転機構部を制御して前記回転体を回転させ、さらに遠心力を作用させて前記堆積層に含まれ水成分を含む低比重成分を分離し、除去する脱水工程と、前記スクレーパ剥離機構部を制御し、脱水された前記堆積層を前記スクレーパを利用して前記回転体の前記内壁面から掻取る掻取工程と、前記堆積層の掻取られた前記内壁面に残存するスラッジを洗浄する洗浄工程と」を具備するものから主に構成されている。
ここで、従来の遠心分離装置の場合、回転体を回転させて遠心分離を行った後、回転体の内壁面に堆積した堆積層をすぐにスクレーパによって掻取る処理を行っていた。しかしながら、係る状態の堆積層は、懸濁液の分離によって形成されたものであり、そのため、多くの低比重成分を含んだ状態にある。
したがって、本発明の遠心分離装置の制御方法によれば、懸濁液の吐出を停止した後に、回転体の高速回転を継続して行うことにより、堆積層に含まれる低比重成分をさらに除去する、すなわち、堆積層の脱水を行うことが可能となる。これにより、回収部に回収される堆積層(スラッジ)の量を脱水によって減容化することができ、さらに回収時のスラッジの重量の低減化も図ることができる。そのため、輸送コストやスラッジを埋め立て作業等に再利用する場合であっても再乾燥のような処理を少なくすることができる。その後、スクレーパで堆積層を掻落とした後、回転体の内壁面に残存するスラッジの一部に対し、洗浄液等を噴射して液圧によって係るスラッジを洗い流す洗浄工程を行う。これにより、スクレーパでは完全に除去することのできない微量のスラッジを内壁面から取除くことが可能となり、回転体による分離効率を低下させることがない。
本発明の効果として、回転軸及び回転体を上方に取外し可能に設置することにより、回転機構部及び回転体に対する交換作業等に要する時間を著しく低減することができ、さらに取外した上でメンテナンス作業を行えるため、係る作業を容易化することができる。
また、回転軸に沿って下方に向かって気流を発生させることにより、回転体の内壁面から回転軸に沿って上昇しようとするミスト化した成分を押戻し、回転体の上部に設けられた低比重成分用の回収口からこれらを回収することができる。さらに、スクレーパに圧力検知センサを設けることにより、回転体の回転時には視認することのできない内空間の状態を把握し、該スクレーパと堆積層とが接したときに回転体による分離処理を停止する制御を行うことが可能となる。これにより、分離効率を常に一定に保つことができる。さらに、分離処理後に堆積層から低比重成分を除去する脱水工程を設けることにより、スラッジの減容化を図ることができる。
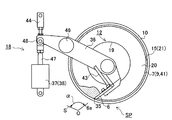
以下、本発明の一実施形態である遠心分離装置1、及び該遠心分離装置1を用いた遠心分離装置の制御方法2(以下、単に「制御方法2」と称す)について、図1乃至図5に基づいて説明する。ここで、図1は本実施形態の遠心分離装置1の概略構成を示す模式断面図であり、図2は分離された回転機構部3及び回転体10、及び回転軸4に取付けられたフィン5の構成を示す説明図であり、図3は剥離位置SPにあるスクレーパ6の一例を示す説明図であり、図4は離間位置LPにあるスクレーパ6による堆積層7の検知の一例を示す説明図であり、図5は本実施形態の制御方法2の処理の流れを示すフローチャートである。なお、図1乃至図4において、説明を簡略化するため、断面等の一部図示を省略している。
本実施形態の遠心分離装置1は、工場等から排出される複数の成分が混在した懸濁液Lを遠心分離の処理対象とするものであり、例えば、無洗米を製造する精米工場から排出される「米のとぎ汁」を処理するものや、機械加工工場から排出される切削用のクーラント液等の産業廃液を挙げることができる。これらの懸濁液Lの中には、水や油等の液相成分8の中に米ヌカや金属の削粉等の固相成分9が分散しているものである。なお、本実施形態の遠心分離装置1によって処理する懸濁液Lは、液相成分8及び固相成分9の間の比重差が比較的近似しているものを分離する際に特に好適である。
本実施形態の遠心分離装置1は、図1乃至図4に示すように、略ボウル状の回転体10と、回転体10の上面と下端軸部11が連結された回転軸4、及び該回転軸4を軸方向に高速で回転させることによって回転体10の内空間12に遠心力を発生させるための駆動用モータ13を主に有する回転機構部3と、回転体10の内空間12に遠心分離の対象となる懸濁液Lを回転体10の上部から供給し、内空間12に向けてミスト化した懸濁液Lを吐出する懸濁液吐出部14と、遠心分離によって懸濁液Lに含まれる固相成分9が回転体10の内壁面15に堆積した堆積層7を掻取るスクレーパ6を備えるスクレーパ剥離機構部18とを主に具備して構成されている。ここで、回転体10は、その周囲を取り囲むように形成された断面略L字形状の基本筐体部17の回転体収容空間16に収容されている。さらに、回転機構部3の下端は、基本筐体部17の上面の一部と接し、固定ボルト31等の固定具に脱着可能に取付けられている(詳細は後述する)。
さらに、詳細に説明すると、本実施形態の遠心分離装置1に利用される回転体10は、下方に開口した開口部19を有し、該開口部19から斜め上方の外周方向(図2等参照)に向かって側斜壁部20が拡開するように形成され、開孔部19の開口径に対して中央及び上端付近が膨らんだ截頭円錐形状を呈して構成されている。さらに、側斜壁部20の上端からは、設置床面(図示しない)に対して略垂直方向(図2における紙面上下方向に相当)に曲折された垂壁部21を有し、該垂壁部21の上端から回転体10の内周側に略水平方向に曲折された曲折部22を有し、この曲折部22によって回転体上面部23が形成されている。すなわち、この回転体上面部23によって、回転体10の上面が閉塞され、内空間12が主として下方にのみ開口している状態が創成される。
さらに、この回転体上面部23には、前述した回転軸4の下端軸部11が連結されている。また、回転体上面部23の一部には、遠心分離作用によって分離された低比重の液相成分8、すなわち、主に水成分を回収するため回収孔部24が設けられている。その結果、回転軸4を軸として開口部19を下方に向けたままで高速回転を回転体10は、内空間12において遠心力を発生させることができ、比重の違いによって分離された液相成分8のみが上述の回収孔部24から回転体10の外部に排出されることになる。なお、上記構成によって回転体10を回転させることにより、例えば、1000rpm以上の回転数で回転体10を回転させると、内空間12において下方から上方に向かって遠心力が作用する、換言すると、側斜壁部20から垂壁部21を介し、さらに曲折部22に到達するような力を物質は受けることとなる。そのため、後述する懸濁液吐出部14から吐出された懸濁液Lは、遠心分離差凹によって低比重成分(水等の液相成分8)と高比重成分(固相成分9)とに分離されることとなり、液相成分8は回収孔部24から排出され、固相成分9は回転体10の内壁面15に付着し、堆積することとなる。なお、本実施形態の遠心分離装置1は、全体重量の軽量化を図るため、アルミニウムを原料とした素材によって、上記回転体10が形成されている。
一方、回転機構部3は、その基本的構成として、前述の回転体10の回転体上面部23と連結された回転軸4と、回転軸4の下軸端部11及び軸中央部25の近傍に設けられ、複数のベアリング26によって、回転軸4を鉛直方向に沿って回転可能に軸支する一対の軸受部27を有し、さらに該回転軸4のほぼ全体を被覆するように形成したベアリングケース28と、回転体10を回転軸4に沿って高速で回転させるための回転力を発生させる駆動用モータ13と、回転軸4の軸周の一部に取設された回転軸側歯付プーリ(図示しない)及び駆動用モータ13のモータ軸29に取設されたモータ側歯付プーリ(図示しない)の間を連結し、駆動用モータ13の回転力を回転軸に伝達するための、各歯付プーリと噛合可能に形成された歯付ベルト30とを具備して主に構成されている。なお、回転機構部3には、その他の構成として、回転軸4の上方(軸中央部25よりも上部)に設けられ、スクレーパ剥離機構部18によってスクレーパ6を回転体10の内壁面15に近接するように(剥離位置SP)に変位させた状態で回転体10を低速で回転させながら、堆積層7(スラッジ41)を掻取り、内壁面15から剥離させるための低速回転用モータ32をさらに具備している。なお、回転軸4の上端近傍にも、前述と同様にベアリング26を介した軸受部27が設けられ、該低速回転用モータ32による回転駆動を軸支可能となっている。さらに、回転機構部3には、上述した遠心分離のための高速回転用の駆動用モータ13と、低速回転用モータ32とのいずれか一方による回転を回転軸4に伝達するための切換用のクラッチ機構部(図示しない)も併せて備えている。
ここで、上述した回転機構部3及び回転体10とは、ボルト31を介して脱着可能に形成されている。さらに、回転機構部3は、基本筐体部17とボルト31を介して締結されているものであり、係る回転機構部3も基本筐体部17に脱着可能となっている。そのため、回転機構部3は、駆動用モータ13及び低速回転用モータ32を除く構成全体を基本筐体部17から容易に取外すことができる。具体的に説明すると、ボルト31による締結を解除し、さらに歯付ベルト30を外すことによって、回転機構部3を基本筐体部17の上方に引上げることによって、回転機構部3全体が取外される。この場合、回転機構部3の回転軸4に取付けられた回転体10を併せて引上げることができる。これにより、従来は困難であった回転体10の内壁面15に対する清掃作業を容易に行うことが可能となるとともに、回転機構部3に対するメンテナンスや部品交換等の作業を簡易に行えるようになる。
さらに、本実施形態の遠心分離装置1の回転機構部3は、回転軸4の軸周に複数のフィン5が取付けられている(図2等参照)。係る構成により、駆動用モータ13による回転力が回転軸4に伝達され、ベアリングケース28内で軸受部27によって軸支された回転軸4が高速で回転する場合、該フィン5によって気流Wを発生させることができる。なお、該フィン5の取付け角度により、気流Wは上方(回転軸4の上端)から下方(回転体10の方向)に向かう流れを生じることになる。ここで、フィン5が本発明における気流発生手段に相当する。これにより、遠心分離装置1による遠心分離処理を行っている間、すなわち、回転体10を高速で回転させている間は、常に回転軸4に沿って上方から下方に向かう気流Wが発生していることになる。その結果、遠心分離によって分離され、回収孔部24に到達した水成分等の低比重成分(液相成分8)は、該気流Wと衝突することによって、回転軸4を伝ってさらに上方に昇ってくることがない。その結果、水成分等の液相成分8が回転機構部3に触れることがない。
また、懸濁液吐出部14は、懸濁液Lを回転体10の内空間12に吐出するためのものであり、その構成として、遠心分離の対象となる懸濁液Lを予め貯留する懸濁液貯留タンク(図示しない)及び該懸濁液Lを回転体10の内空間12まで圧送するための圧力を与える送液ポンプ(図示しない)と接続し、回転軸4の中央を刳り抜いたように配され、回転体10の内空間12まで懸濁液Lを送出し、供給可能な懸濁液供給管33と、回転体10の内空間12に一部が挿入された懸濁液供給管33の端部近傍に形成され、回転体10の内空間12(具体的には、内壁面15)に対して霧状の懸濁液Lを噴霧するノズル34とによって主に構成されている。ここで、図1及び図2に示されるように、懸濁液供給管33の上端と送液ポンプ及び懸濁液貯留タンクが接続され、懸濁液供給管33の周囲に回転軸4等が配置されることになる。そのため、懸濁液供給管33自体が回転することはない。さらに、回転体10の内空間12のほぼ中央付近に配されたノズル34は、例えば、二方向の内壁面15に懸濁液Lを霧状(ミスト化)して噴霧可能なように少なくとも一対が設けられている。なお、該ノズル34の先端は、複数の穴(図示しない)を形成し、多方向に噴霧(吐出)可能にするものであっても構わない。なお、これらの穴の数が大きいと、送圧のための空気量が多く必要となる可能性があるため、霧状化の効率の低下を抑えるために、一箇所当たり、16個以下になるように設計することが望ましい。また、個々の穴は、懸濁液に含まれる比較的大径の固相成分9による目詰まりを回避するために、少なくとも10mm以上の大きさに開口するように設計することが望ましい。
さらに、スクレーパ剥離機構部18は、回転体10の側斜壁部20及び垂壁部21によって形成される内壁面15の内壁面形状と略一致するように形成されたスクレーパ端部35を有し、内壁面15に付着した固相成分9からなるスラッジ41、或いは該スラッジ41が堆積した堆積層7を物理的に掻取るためのスクレーパ6と、スクレーパ6を回転体の内空間12に支持するためのアーム状のスクレーパアーム36と、該スクレーパ6を剥離位置SP及び離間位置Lの間で変位させるための移動力を生じさせるアクチュエータ等からなるスクレーパ変位部37とを主に具備して主に構成されている。
さらに、詳細に説明すると、スクレーパ剥離機構部18は、図3及び図4に示されるように、スクレーパアーム36の略中央部分と接続し、回動可能にスクレーパアーム36を支持するアーム支持部46と、スクレーパアーム36の端部とスクレーパ変位部37の伸張可能なアクチュエータアーム47とを連結するアーム連結部48と、アーム連結部48の一部と当接可能に形成され、スクレーパアーム36による回動を一定範囲に規制するためのストッパー44とを具備して主に構成されている。
これにより、図3及び図4に示されるように、スクレーパ6のスクレーパ端部35が内壁面15に近接する剥離位置SP及び離間した離間位置LPの間で変位することができる。さらに、スクレーパ6を変位させるスクレーパ変位部37には、スクレーパ6に対して加えられた力(圧力)を検知する圧力検知センサが設置されている。なお、本実施形態の遠心分離装置1において、懸濁液Lを内空間12に吐出し、遠心力による分離処理を行っている場合、内空間12にスクレーパアーム36によって支持されたスクレーパ6には、ほとんど圧力が加わることがない。そのため、通常の遠心分離処理では圧力検知センサ38によって検知される圧力はほぼゼロである。
しかしながら、懸濁液Lを内空間12に吐出し、徐々に内壁面15にスラッジ41が付着し、堆積層7の厚さが増加すると、離間位置LPにあるスクレーパ6と接触する可能性がある(図4参照)。このとき、離間位置LPにあるスクレーパ6の先端のスクレーパ端部35と回転体10の内壁面15との間の距離が、堆積層7の最大許容層厚になるように設定されている。
そのため、堆積層7の厚さが徐々に増加し、スクレーパ6のスクレーパ端部35と接触するようになったとき、すなわち、最大許容層厚に堆積層7の層厚が到達した場合、該堆積層7の最上面とスクレーパ6とが接触することになる。そして、図4に示す矢印Aの方向にスクレーパ6を押圧することになる。この状態で、懸濁液Lの吐出及び回転体10の回転を継続し、遠心分離処理を続けると、スクレーパ6によって堆積層7の最上面のみを掻取り続けることになり、スクレーパ6と堆積層7とが常に接触するために、回転体10のスムーズな回転が阻害されることなる。さらに、堆積層7が厚く付着していることにより、回転体10の遠心力による分離効果が低下するとともに、回転体10のスムーズな回転が阻害される(例えば、振動等の発生)要因ともなる。
そこで、本実施形態の遠心分離装置1では、スクレーパ6に対する圧力を検知する圧力検知センサ38を設け、該圧力を検知した場合に、懸濁液Lの吐出及び回転体10の回転を停止する制御機構が設けられている。
さらに、具体的に説明すると、上述した矢印A方向への力が堆積層7によってスクレーパ6に加わった場合、アーム支持部46に支持されたスクレーパアーム36の一端(アーム連結部48)は、矢印B方向に押され、アクチュエータアーム47が縮むことになる。そのため、スクレーパ変位部37に設置された圧力検知センサ38によってこの動きを検知し、遠心分離処理の停止制御を行うことができる。
これにより、処理する懸濁液Lの種類に応じて稼働停止するタイミングをタイマー等で調整する必要がなく、また作業員が堆積層7の付着状態を常に監視する必要をなくすことができる。
また、スクレーパ剥離機構部18は、剥離位置SPにおけるスクレーパ6と回転体10の内壁面15との間の角度(スクレーパ角度α)を100°以上、150°以下の範囲に設定することができる。ここで、スクレーパ角度αについて詳述すると、スクレーパ端部35と回転体10の内壁面15との近接点Oを基準とし、該近接点Oと接する円形状の回転体10との接線S及びスクレーパ端部35から延びる板状のスクレーパ6のスクレーパ辺6との間のなす角を本明細書中においてスクレーパ角度αとして定義している(図3参照)。なお、本実施形態では、約120°のスクレーパ角度に設定されている(図3参照)。これにより、堆積した堆積層7(スラッジ41)のくい込みや堆積層7の表面のみを削り取ることがなく、確実な掻取りを行うことができる。なお、スクレーパ変位部37によるアクチュエータアーム47を介したスクレーパ6の変位は、本実施形態ではエアー圧を利用して行われている。
加えて、回転体10の開口部19の下方には、スラッジ回収部39が設けられ、内壁面15から剥離したスラッジ41(堆積層7)を回収することができる。該スラッジ回収部39は、開口部19に対向するように形成した回収口40を有し、該回収口40を開閉塞可能とする蓋部42をを有している。ここで、スクレーパ6には、掻落としたスラッジ41をスムーズにスラッジ回収部39で回収するためにスクレーパアーム36に沿って略鉛直に形成された落とし板43が設けられている。すなわち、スラッジ41の中には、水分等を含み粘性が高いものが存在する可能性がある。このような高粘性のスラッジ41は、内壁面15から掻落とされても重力に従ってそのまま下方に落下することがなく、スクレーパ6に付着しながら徐々にスクレーパアーム36などの内空間12の中心付近に集まってくる可能性がある。そのため、スクレーパ6やスクレーパアーム36に多量のスラッジ41が付着し、最終的には遠心分離装置1の稼働を停止し、これらを手作業で掻落とす必要があった。
そこで、スクレーパアーム36付近に到達したスラッジ41を落とし板43に接触させ、回収口40に導くようにすることができる。なお、スクレーパ6に対する付着をできる限り小さくするために、スクレーパ6の表面には、フッ素樹脂コーティングが施されている。さらに、スクレーパ6は、摩耗等による交換を容易にするために、ボルト等で取外し可能に形成され、さらに内壁面15と所定の間隔を保持して近接するように微調整用のアジャスターボルトにて取付けられている。
さらに、本実施形態の遠心分離装置1は、回転体10の回転体上面部23に僅かな傾斜を設け、回収孔部24から導出された低比重の液相成分8が回転体10の外部で泡立つことを防ぐ対策、回転体10の板厚を6mm以上に設定することにより、回転時の振動を低減する対策、回転体上面部23に使用されるネジを頭部が平滑な皿ネジを使用することにより、液相成分8とネジ部との接触面積を小さくし、泡の発生を防ぐ対策等を種々行っている。また、駆動用モータ13及び低速回転用モータ32による振動を抑制するために、基本筐体部17の各コーナーに防振ゴム45が取付けられている。
次に、本実施形態の遠心分離装置1を利用した懸濁液の遠心分離処理の一例について、主に図5に基づいて説明する。ここで、図5に係るフローチャートが本発明の制御方法2に相当する。
始めに回転機構部3を制御し、回転体10を駆動用モータ13の回転力を利用して高速で回転させる。これにより、略ボウル状に形成された回転体10には、下方から上方に向かって遠心力が発生することになる。さらに、回転機構部3の制御とほぼ同じタイミングで懸濁液吐出部14を連動するように制御し、回転体10の内壁面15に向かってノズル34から懸濁液Lを霧状にして吐出する(遠心分離工程S1)。これにより、高速回転によって遠心力が下から上に向かって発生している回転体10の内壁面15の近傍に到達した懸濁液Lは、該遠心力によって比重の異なる成分毎に分離し、高比重の固相成分9が内壁面15に付着するとともに、低比重の液相成分8は下から上に向かって作用する遠心力によって徐々に回転体10の内壁面15を伝って回転体上面部23に到達する。
そして、回転体上面部23には、予め複数の回収孔部24が形成されている。回転体上面部23に到達した液相成分8は、該回収孔部24から回転体10の外に導かれ、基本筐体部17に設けられた低比重成分用の回収部(図示しない)に回収される。このとき、回転体上面部23と連結された回転軸4を軸支する軸受部27の近傍からは回転体10に向かって気流Wが発生している。係る気流Wは回転軸4に取付けられたフィン5によるものであり、これにより、回収孔部24から外部に導出されたミスト状の液相成分8が回転機構部3の内部に向かうのを防ぐことができる。すなわち、遠心力によって上方に昇ろうとする液相成分8を気流Wによって押戻すことができる。なお、該気流Wは回転体10の回転体上面部23と回転軸4との連結箇所に到達すると、回転体10の側周方向に向かって流れ方向が変化する。そのため、回収孔部24から再び回転体10の内空間12に液相成分8を押戻すことはなく、逆に液相成分8を内空間12から吸引するようにして回収部に送出することができる。これにより、回転機構部3に液相成分8が付着し、サビなどが発生したり、或いは回転体10の滑らかな回転を阻害するような不具合を生じることがない。
この遠心分離工程S1では、スクレーパ6は回転体10の内空間12の離間位置LPに設定されている。そして、懸濁液Lの吐出を継続し、固相成分9によるスラッジ41が堆積し、徐々に堆積層7の厚さが増すと、最終的に堆積層7がスクレーパ6と接触することとなる。ここで、前述したように、スクレーパ剥離機構部18には、スクレーパ6に対する圧力を検知する圧力検知センサ38が設けられている。そこで、遠心分離装置1は、この圧力を検知する(圧力検知工程S2)。ここで、スクレーパ6に対する圧力が検知される場合(圧力検知工程S2においてYES)、懸濁液吐出部14による懸濁液Lの吐出を停止する(懸濁液停止工程S3)。一方、スクレーパ6に対する圧力が検知されない場合(圧力検知工程S2においてNO)、遠心分離工程S1を継続することとなる。なお、ここで、圧力検知センサ38における圧力の検知とは、予め設定された閾値以上の圧力を圧力検知センサ38が受けた場合のことであり、懸濁液Lの吐出によって僅かにスクレーパ6が揺れるだけの場合、或いは回転体10の回転による風圧でスクレーパ6に圧力がかかった場合などは懸濁液停止工程S3を行わない設定となっている。
そして、懸濁液Lの吐出を停止した状態で所定時間(例えば、20分間など)、回転体10の高速回転のみを実行する(脱水工程S4)。ここで、懸濁液Lから遠心分離され、内壁面15に付着した堆積層7(スラッジ41)は、分離直後であるため内部に多量の水分等の液相成分8を含んでいることがある。そこで、懸濁液Lの吐出を停止した後でも高速で回転体10の回転を継続することにより、洗濯機の脱水と同じ作用を堆積層7に対して奏させることができる。すなわち、継続して高速で回転する回転体10によって、遠心力は引続き作用し、堆積層7に含まれる液相成分8も係る作用を受けることになる。その結果、堆積層7内では、液相成分8をほとんど含まない乾燥した固相成分9が内壁面15に強く押付けられるようになり、一方、比重の低い液相成分8を含む固相成分9は、堆積層7の表面付近に存在することになる。そして、表面付近の液相成分8は再び下から上への遠心力を受けることにより、回転体上面部23の回収孔部24に至ることになる。すなわち、遠心分離された堆積層7からさらに液相成分8を絞り取る脱水処理が行われることとなる。そして、完全に脱水が完了した後に、回転体10の高速回転を停止する(回転体停止工程S5)。
そして、スクレーパ剥離機構部18を制御し、離間位置LPに位置するスクレーパ6を剥離位置SPまで移動させる。このとき、回転体10の内壁面15には、固相成分9を主とする堆積層7が存在しているため、スクレーパ6の変位のみを行っても、堆積層7にスクレーパ6のスクレーパ端部35が食い込むだけで、その後の動きが停止、或いは滑らかな剥離処理が行えないことがある。
そこで、クラッチ機構部(図示しない)を切換え、低速回転用モータ32を駆動する(低速回転工程S6)。これにより、回転体10は大きな遠心力を発生させることなく回転する。このとき、スクレーパ変位部37によって、離間位置LPから剥離位置SPまで徐々にスクレーパ6を移動させる(スクレーパ変位工程S7)。これにより、スクレーパ端部35は徐々に堆積層7と接触し、回転体10の回転に応じて少しずつ堆積層7の最上層を削り取りながら内壁面15からスラッジ41を削り取ることとなる(掻取工程S8)。なお、堆積層7を構成するスラッジ41が比較的柔らかい物質で構成される場合は、上述の低速回転工程S6と同時にスクレーパ6を剥離位置SPまで一度に変位させるものであっても構わない。
これにより、スクレーパ6で掻取られたスラッジ41は落とし板43等を利用してスラッジ回収部39に回収口40を通って回収される。
その後、回転体10の大部分のスラッジ41が掻取られた後に、回転体10の内壁面15に対して水或いは界面活性剤を含む洗浄液(図示しない)を噴出する(洗浄工程S9)。係る構成は、特に詳細に説明しないが、例えば、懸濁液Lを貯留する懸濁液貯留タンクと同構成の洗浄液貯留タンク(図示しない)を設け、さらに懸濁液Lを圧送する送液ポンプを切換えることにより、洗浄液貯留タンク内の洗浄液を懸濁液供給管33及びノズル34を介して噴出させることができる。これにより、内壁面15に僅かに付着しているスラッジ41を洗い流すことができる。その結果、回転体10の内壁面15にはスラッジ41の全く付着していない状態が創成される。
これにより、本発明の遠心分離装置1を用い、遠心分離処理、脱水処理、掻取処理、及び洗浄処理を一連の流れの中で実行することができる。
以上示したように、本実施形態の遠心分離装置1は、固定式のためメンテナンス作業が容易に行えなかった従来型に比べ、回転機構部3(駆動用モータ13等は除く)及び回転体10を一体的或いは独立してそれぞれ、基本筐体部17から脱着させることができる。その結果、遠心分離装置1のオーバーホール等のメンテナンス、清掃作業を容易に行うことができる。
加えて、本実施形態の遠心分離装置1は、回転軸4に取付けられたフィン5によって気流Wを発生させ、ミスト化した液相成分8が回転機構部3へ侵入しないようにすることができる。これにより、回転体10の安定した回転を長期間に亘って維持することができる。
さらに、スクレーパ6に圧力検知センサ38を設けることにより、堆積層7の溜まり具合を検知することができ、スクレーパ6による掻取りの開始タイミングを認識することができる。その結果、従来のように、作業者の判断やタイマー等の画一的な基準による開始タイミングの把握に比べ、処理する懸濁液Lの種類に応じて適切な時期に掻取り処理に移行することが可能となる。その結果、分離効率を最適な状態にして懸濁液Lの分離処理を実行することができる。
さらに、本実施形態の遠心分離装置1の制御方法2によって、堆積層7を形成した固相成分9のスラッジ41からさらに水分等の液相成分8を分離する脱水を行うことができる。これにより、スラッジ回収部39によって回収されるスラッジ41の減容化及び重量の軽減化を図ることができる。
以上、本発明について好適な実施形態を挙げて説明したが、本発明はこれらの実施形態に限定されるものではなく、以下に示すように、本発明の要旨を逸脱しない範囲において、種々の改良及び設計の変更が可能である。
すなわち、本実施形態の遠心分離装置1において、気流発生手段として、回転軸4の回転力を利用してフィン5で気流Wを発生するものを示したがこれに限定されるものではなく、ミストの侵入を防ぐことのできるものであれば特に構わない。例えば、回転軸4に沿ってエアーポンプからエアーを強制的、かつ継続的に供給するような構成を備えるものであっても構わない。さらに、回転体10の形状は、特に限定されるものではなく、一般的な遠心分離装置に使用されるものを適宜選択することが可能である。