JP4791333B2 - パターン寸法計測方法及び走査型透過荷電粒子顕微鏡 - Google Patents
パターン寸法計測方法及び走査型透過荷電粒子顕微鏡 Download PDFInfo
- Publication number
- JP4791333B2 JP4791333B2 JP2006323759A JP2006323759A JP4791333B2 JP 4791333 B2 JP4791333 B2 JP 4791333B2 JP 2006323759 A JP2006323759 A JP 2006323759A JP 2006323759 A JP2006323759 A JP 2006323759A JP 4791333 B2 JP4791333 B2 JP 4791333B2
- Authority
- JP
- Japan
- Prior art keywords
- measurement
- target pattern
- measurement target
- pattern
- charged particle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




















Landscapes
- Length-Measuring Devices Using Wave Or Particle Radiation (AREA)
- Testing Or Measuring Of Semiconductors Or The Like (AREA)
Description
ことを特徴とする。また、本発明は、前記電子画像取得過程において、前記走査型荷電粒
子線顕微鏡における前記荷電粒子線の加速電圧が200keV以上であることを特徴とす
る。また、本発明は、前記電子画像取得過程において、さらに、前記走査型荷電粒子線顕
微鏡における前記荷電粒子線のビーム開き角を、前記計測対象パターンの前記荷電粒子顕微鏡の光軸と直行する方向の寸法の前記光軸方向の位置による寸法変化量に基づいて決めるビーム開き角決定過程を含むことを特徴とする。
該第1の電子画像取得過程において前記所望のx−y断面内の計測位置に合せたそれぞれの焦点位置で取得した第1の透過電子画像若しくは散乱電子画像を処理して、該それぞれの焦点位置での電子画像内の計測対象パターンのエッジ位置を算出する第1のエッジ位置算出過程と、前記計測対象パターンを反転させ、収束荷電粒子線の走査照射位置を前記反転した計測対象パターンの所望のx−y断面内の計測位置に合せて前記収束荷電粒子線の焦点位置を前記反転した計測対象パターンに対してz軸方向に順次変化させ、それぞれの焦点位置での前記反転した計測対象パターンの第2の透過電子画像若しくは散乱電子画像を取得する第2の電子画像取得過程と、該第2の電子画像取得過程において前記所望のx−y断面内の計測位置に合せたそれぞれの焦点位置で取得した第2の透過電子画像若しくは散乱電子画像を処理して、該それぞれの焦点位置での電子画像内の反転した計測対象パターンのエッジ位置を算出する第2のエッジ位置算出過程と、前記第1のエッジ位置算出過程で算出されたそれぞれの焦点位置での電子画像内の計測対象パターンのエッジ位置と前記第1の電子画像取得過程において電子画像を取得したそれぞれの焦点位置との組み合わせ及び前記第2のエッジ位置算出過程で算出されたそれぞれの焦点位置での電子画像内の反転した計測対象パターンのエッジ位置と前記第2の電子画像取得過程において電子画像を取得したそれぞれの焦点位置との組み合わせに基づいて、前記計測対象パターンの3次元断面形状計測を行う断面形状計測過程とを有することを特徴とするパターン計測方法である。
第1の実施の形態として、本発明に係るパターン計測方法の基本的な手順とシステム構成を図1から図12を用いて説明する。
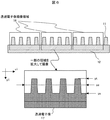
本発明に係る第1の実施の形態では、計測対象パターンの周囲に保護膜がない場合について説明した。本発明に係る第2の実施の形態では、計測対象パターンの周囲に保護膜がある場合について説明する。図12の実施例で説明したように、本発明のパターン計測を精度良く実行するためには、できるだけ多くの電子が固体により散乱されることなく計測対象表面に収束して照射されることが望ましい。しかしながら、材料によっては保護膜がなければ断面観察用の加工が困難なケースもある。このような場合には、保護膜の影響による精度低下を低減する必要がある。図13は固体内散乱により収束ビームがどのように拡がってしまうかをシミュレーションした例である。200kevの電子ビームを照射したとき、左の図は試料表面から2ミクロン、右の図は1ミクロンの深さにフォーカスした場合のビームの拡がり31、32を示している。なお、固体内の散乱が無い場合はビーム径は無限小となる条件で計算している。図13からわかるように、試料表面からの深さが深いほど電子ビームの実効的な径は太くなってしまう。特許文献1のFig.3に開示されている図も同様のデータであるが、深さに比例するのではなく、ある程度から急激に分解能が低下する。保護膜がある場合にはこの影響が避けられない。本発明に係る第2の実施の形態ではこのような固体内拡散によるビーム径の増大に対応する方法を開示する。
本発明に係る第3の実施の形態における第1及び第2の実施の形態との相違点は、例えば画像処理部314において傾き補正を行うことにある。次に、本発明に係るSTEMによるパターン形状計測における第3の実施の形態である計測対象パターンの取り付け時に生じる試料の傾きを補正し、該補正した結果を出力する方法について説明する。STEMでの観察、計測時にはFIBで加工した試料をSTEMで観察するが、この試料の取り付け方によっては、ラインの長手方向がz軸と平行にならない場合がある(軸の取り方については、例えば図2(b)参照)。このような場合には、図17(a)に示すように計測結果が傾きを持ってしまう。このように傾きを持ってしまった場合には、画像処理部314において、これらのデータ(検出されたエッジ位置)26を近似する1次直線34を最小自乗法により求めて、計測データの補正を行えばよい。このようにしてデータの補正により傾きをキャンセルすることができれば、傾きに起因した寸法計測誤差を排除することができ、より高精度な計測が可能になる。また、図8(b)に示したように3次元でパターン構造21を表わすときなどに扱いやすいといった利点がある。また、第2の実施の形態のように、観察方向を変更する場合、ステージの精度によって回転前後でz軸に対する傾きが変化してしまう可能性があるが、このような場合にも、予め回転を補正した上で、加重平均などの処理を行えばよい。
本発明に係る第4の実施の形態における第1乃至第3の実施の形態との相違点は、画像処理部314において異常値を除く処理を行うことにある。
本発明に係る第5の実施の形態における第1乃至第4の実施の形態との相違点は、画像処理部314におけるGUIである。
本発明に係る第6の実施の形態における第1乃至第5の実施の形態との相違点は、STEMの例えば画像処理部314において他の計測ツール(測長SEM又はCDSEM又は測長用のAFM)とキャリブレーションすることである。
300…制御装置、300a…ビーム開き角調整部、300b…加速電圧設定部、300c…フォーカス調整位置制御部、300d…ビーム走査照射位置制御部、301…電子源、302…電子レンズ、303…偏向器、304…対物レンズ、305…試料(サンプル)、306…暗視野検出器、307…明視野検出器、308…電子ビーム、309…A/D変換器、310…2次電子検出器、311…記憶装置、312…外部インターフェース、313…表示装置、314…画像処理部、315…条件入力画面(GUI)、316…結果表示画面(GUI)。
Claims (25)
- 走査型透過荷電粒子顕微鏡を用いて、計測対象パターンの3次元断面形状計測を行うパ
ターンの計測方法であって、
収束荷電粒子線の走査照射位置を前記計測対象パターンの長手方向が前記荷電粒子顕微鏡の光軸と平行になるように配置した前記計測対象パターンの前記荷電粒子顕微鏡の光軸と直交する所望の平面(x−y断面)内の計測位置に合せて前記収束荷電粒子線の焦点位置を前記計測対象パターンの前記荷電粒子顕微鏡の光軸(z軸)方向に対して順次変化させ、それぞれの焦点位置での前記計測対象パターンの透過電子画像若しくは散乱電子画像を取得する電子画像取得過程と、
該電子画像取得過程において前記所望のx−y断面内の計測位置に合せたそれぞれの焦点位置で取得した透過電子画像若しくは散乱電子画像を処理して、該それぞれの焦点位置での電子画像内での計測対象パターンのエッジ位置を算出するエッジ位置算出過程と、
該エッジ位置算出過程で算出されたそれぞれの焦点位置での電子画像内の計測対象パタ
ーンのエッジ位置と前記電子画像取得過程において電子画像を取得したそれぞれの焦点位
置との組み合わせに基づいて、前記計測対象パターンの3次元断面形状計測を行う断面形
状計測過程とを有することを特徴とするパターン計測方法。 - 前記計測対象パターンは、z軸方向にラインパターンで形成されていることを特徴とする請求項1に記載のパターン計測方法。
- 前記計測対象パターンは、z軸方向に長さ2μm以上のラインパターンで形成され、
前記断面形状計測過程において、前記計測対象パターンの3次元断面形状計測として所
定のz軸断面における前記ラインパターンの平均寸法、ライン幅ラフネス又はラインエッジラフネスを計測することを特徴とする請求項1に記載のパターン計測方法。 - 前記計測対象パターンの周囲には保護膜などの固体が付着していないことを特徴とする
請求項1に記載のパターン計測方法。 - 前記電子画像取得過程において、前記走査型荷電粒子線顕微鏡における前記荷電粒子線
の加速電圧が200keV以上であることを特徴とする請求項1に記載のパターン計測方
法。 - 前記電子画像取得過程において、さらに、前記走査型荷電粒子線顕微鏡における前記荷
電粒子線のビーム開き角を、前記計測対象パターンの前記荷電粒子顕微鏡の光軸と直行する方向の寸法の前記光軸方向の位置による寸法変化量に基づいて決めるビーム開き角決定過程を含むことを特徴とする請求項1に記載のパターン計測方法。 - 前記エッジ位置算出過程において、前記それぞれの焦点位置での電子画像内から得られ
た信号波形において、その傾きが最大となる座標を前記計測対象パターンのエッジ座標と
することを特徴とする請求項1に記載のパターン計測方法。 - 前記エッジ位置算出過程において、前記それぞれの焦点位置での電子画像内から得られ
た信号波形において、該信号波形が画像取得条件に応じて設定したしきい値と一致する点
を計測対象パターンのエッジ座標とすることを特徴とする請求項1に記載のパターン計測
方法。 - 前記断面形状計測過程において、前記エッジ位置算出過程で算出されたそれぞれの焦点
位置での電子画像内の計測対象パターンのエッジ位置の算出結果と前記それぞれの焦点位
置との関係を1次式で近似し、該近似式の傾きにより前記それぞれの焦点位置での計測対
象パターンのエッジ位置の算出結果を補正する傾き補正過程を含むことを特徴とする請求
項1に記載のパターン計測方法。 - 前記断面形状計測過程において、前記エッジ位置算出過程で算出されたそれぞれの焦点
位置での電子画像内の計測対象パターンのエッジ位置の算出結果の平均値からの差分が、
予め指定した許容値よりも大きいときには前記計測対象パターンの3次元断面形状計測結
果を排除する排除過程を含むことを特徴とする請求項1に記載のパターン計測方法。 - 走査型荷電粒子線顕微鏡を用いて、計測対象パターンの3次元断面形状計測を行うパタ
ーンの計測方法であって、
収束荷電粒子線の走査照射位置を前記計測対象パターンの長手方向が前記荷電粒子顕微鏡の光軸と平行になるように配置した前記計測対象パターンの前記荷電粒子顕微鏡の光軸と直交する所望の平面(x−y断面)内の計測位置に合せて前記収束荷電粒子線の焦点位置を前記計測対象パターンに対して前記荷電粒子顕微鏡の光軸(z軸)方向に順次変化させ、それぞれの焦点位置での前記計測対象パターンの第1の透過電子画像若しくは散乱電子画像を取得する第1の電子画像取得過程と、
該第1の電子画像取得過程において前記所望のx−y断面内の計測位置に合せたそれぞれの焦点位置で取得した第1の透過電子画像若しくは散乱電子画像を処理して、該それぞれの焦点位置での電子画像内の計測対象パターンのエッジ位置を算出する第1のエッジ位置算出過程と、
前記計測対象パターンを反転させ、収束荷電粒子線の走査照射位置を前記反転した計測
対象パターンの所望のx−y断面内の計測位置に合せて前記収束荷電粒子線の焦点位置を前記反転した計測対象パターンに対してz軸方向に順次変化させ、それぞれの焦点位置での前記反転した計測対象パターンの第2の透過電子画像若しくは散乱電子画像を取得する第2の電子画像取得過程と、
該第2の電子画像取得過程において前記所望のx−y断面内の計測位置に合せたそれぞれの焦点位置で取得した第2の透過電子画像若しくは散乱電子画像を処理して、該それぞれの焦点位置での電子画像内の反転した計測対象パターンのエッジ位置を算出する第2のエッジ位置算出過程と、
前記第1のエッジ位置算出過程で算出されたそれぞれの焦点位置での電子画像内の計測
対象パターンのエッジ位置と前記第1の電子画像取得過程において電子画像を取得したそ
れぞれの焦点位置との組み合わせ及び前記第2のエッジ位置算出過程で算出されたそれぞ
れの焦点位置での電子画像内の反転した計測対象パターンのエッジ位置と前記第2の電子
画像取得過程において電子画像を取得したそれぞれの焦点位置との組み合わせに基づいて
、前記計測対象パターンの3次元断面形状計測を行う断面形状計測過程とを有することを
特徴とするパターン計測方法。 - 前記断面形状計測過程において、前記第1のエッジ位置算出過程で算出された計測対象
パターンのエッジ位置の算出結果と前記第2のエッジ位置算出過程で算出された反転した
計測対象パターンのエッジ位置の算出結果とに計測対象パターンの表面からの深さに応じ
た重みをかけた加重平均により、前記計測対象パターンの3次元断面形状計測を行うこと
を特徴とする請求項11に記載のパターン計測方法。 - 前記断面形状計測過程において、前記第1のエッジ位置算出過程で算出されたそれぞれ
の焦点位置での電子画像内の計測対象パターンのエッジ位置の算出結果と前記それぞれの
焦点位置との関係及び前記第2のエッジ位置算出過程で算出されたそれぞれの焦点位置の
電子画像内での反転した計測対象パターンのエッジ位置の算出結果と前記それぞれの焦点
位置との関係の各々を1次式で近似し、該各々の近似式の傾きにより前記計測対象パター
ンのエッジ位置の算出結果及び前記反転した計測対象パターンのエッジ位置の算出結果の
各々を補正する傾き補正過程を含むことを特徴とする請求項11に記載のパターン計測方
法。 - 前記断面形状計測過程において、前記第1のエッジ位置算出過程で算出されたそれぞれ
の焦点位置での電子画像内の計測対象パターンのエッジ位置の算出結果の平均値からの差
分が、予め指定した許容値よりも大きいとき及び前記第2のエッジ位置算出過程で算出さ
れたそれぞれの焦点位置の電子画像内での反転した計測対象パターンのエッジ位置の算出
結果の平均値からの差分が、予め指定した許容値よりも大きいときには前記計測対象パタ
ーンの3次元断面形状計測結果を排除する排除過程を含むことを特徴とする請求項11に記載のパターン計測方法。 - 更に、前記断面形状計測過程において計測された前記計測対象パターンの3次元断面形
状計測結果をインタラクティブに操作可能な3次元グラフで表示する表示過程とを有する
ことを特徴とする請求項1または11に記載のパターン計測方法。 - 計測対象パターンの3次元断面形状計測を行う走査型透過荷電粒子顕微鏡であって、
収束荷電粒子線の走査照射位置を前記計測対象パターンの長手方向が前記荷電粒子顕微鏡の光軸と平行になるように配置した前記計測対象パターンの前記荷電粒子顕微鏡の光軸と直交する所望の平面(x−y断面)内の計測位置に合せて収束荷電粒子線の焦点位置を前記計測対象パターンの前記荷電粒子顕微鏡の光軸(z軸)方向に対して順次変化させ、それぞれの焦点位置での前記計測対象パターンの透過電子画像若しくは散乱電子画像を取得する電子画像取得部と、
該電子画像取得部において前記所望のx−y断面内の計測位置に合せたそれぞれの焦点位置で取得した透過電子画像若しくは散乱電子画像を処理して、該それぞれの焦点位置での電子画像内での計測対象パターンのエッジ位置を算出するエッジ位置算出部並びに該エッジ位置算出部で算出されたそれぞれの焦点位置での電子画像内の計測対象パターンのエッジ位置と前記電子画像取得部において電子画像を取得したそれぞれの焦点位置との組み合わせに基づいて、前記計測対象パターンの3次元断面形状計測を行う断面形状計測部とを有する画像処理部とを備えたことを特徴とする走査型透過荷電粒子顕微鏡。 - 前記画像処理部の断面形状計測部は、前記計測対象パターンの3次元断面形状計測とし
て所定のz軸断面におけるラインパターンの平均寸法、ライン幅ラフネス又はラインエッジラフネスを計測するように構成することを特徴とする請求項16に記載の走査型透過荷電粒子顕微鏡。 - 前記電子画像取得部において、さらに、前記荷電粒子線のビーム開き角を、前記計測対
象パターンの前記荷電粒子顕微鏡の光軸と直行する方向の寸法の前記光軸方向の位置による寸法変化量に基づいて決めるビーム開き角決定部を含むことを特徴とする請
求項16に記載の走査型透過荷電粒子顕微鏡。 - 前記画像処理部のエッジ位置算出部において、前記それぞれの焦点位置での電子画像内
から得られた信号波形において、その傾きが最大となる座標を前記計測対象パターンのエ
ッジ座標とするように構成することを特徴とする請求項16に記載の走査型透過荷電粒子
顕微鏡。 - 前記画像処理部のエッジ位置算出部において、前記それぞれの焦点位置での電子画像内
から得られた信号波形において、該信号波形が画像取得条件に応じて設定したしきい値と
一致する点を計測対象パターンのエッジ座標とするように構成することを特徴とする請求
項16に記載の走査型透過荷電粒子顕微鏡。 - 前記画像処理部の断面形状計測部において、前記エッジ位置算出部で算出されたそれぞ
れの焦点位置での電子画像内の計測対象パターンのエッジ位置の算出結果と前記それぞれ
の焦点位置との関係を1次式で近似し、該近似式の傾きにより前記それぞれの焦点位置で
の計測対象パターンのエッジ位置の算出結果を補正する傾き補正部を含むことを特徴とす
る請求項16に記載の走査型透過荷電粒子顕微鏡。 - 計測対象パターンの3次元断面形状計測を行う走査型透過荷電粒子顕微鏡であって、
収束荷電粒子線の走査照射位置を前記計測対象パターンの長手方向が前記荷電粒子顕微鏡の光軸と平行になるように配置した前記計測対象パターンの前記荷電粒子顕微鏡の光軸と直交する所望の平面(x−y断面)内の計測位置に合せて前記収束荷電粒子線の焦点位置を前記計測対象パターンに対して前記荷電粒子顕微鏡の光軸(z軸)方向に順次変化させ、それぞれの焦点位置での前記計測対象パターンの第1の透過電子画像若しくは散乱電子画像を取得し、さらに、前記計測対象パターンを反転させ、収束荷電粒子線の走査照射位置を前記反転した計測対象パターンの所望の前記x−y断面内の計測位置に合せて前記収束荷電粒子線の焦点位置を前記反転した計測対象パターンに対して前記z軸方向に順次変化させ、それぞれの焦点位置での前記反転した計測対象パターンの第2の透過電子画像若しくは散乱電子画像を取得する電子画像取得部と、
該電子画像取得部において前記所望のx−y断面内の計測位置に合せたそれぞれの焦点位置で取得した第1の透過電子画像若しくは散乱電子画像を処理して、該それぞれの焦点位置での電子画像内の計測対象パターンのエッジ位置を算出し、さらに、前記電子画像取得部において前記所望のx−y断面内の計測位置に合せたそれぞれの焦点位置で取得した第2の透過電子画像若しくは散乱電子画像を処理して、該それぞれの焦点位置での電子画像内の反転した計測対象パターンのエッジ位置を算出するエッジ位置算部、並びに該エッジ位置算出部で算出されたそれぞれの焦点位置での電子画像内の計測対象パターンのエッジ位置と前記それぞれの焦点位置との組み合わせ及び前記エッジ位置算出部で算出されたそれぞれの焦点位置での電子画像内の反転した計測対象パターンのエッジ位置と前記それぞれの焦点位置との組み合わせに基づいて、前記計測対象パターンの3次元断面形状計測を行う断面形状計測部とを有する画像処理部とを備えたことを特徴とする走査型透過荷電粒子顕微鏡。 - 前記画像処理部の断面形状計測部において、前記エッジ位置算出部で算出された計測対
象パターンのエッジ位置の算出結果と前記エッジ位置算出部で算出された反転した計測対
象パターンのエッジ位置の算出結果とに計測対象パターンの表面からの深さに応じた重み
をかけた加重平均により、前記計測対象パターンの3次元断面形状計測を行うように構成
することを特徴とする請求項22に記載の走査型透過荷電粒子顕微鏡。 - さらに、前記電子画像取得部において前記計測対象パターンの透過電子画像若しくは散
乱電子画像を取得するための前記計測対象パターンの長手方向の寸法及び前記順次変化さ
せる焦点位置の間隔を含む画像取得条件と、前記画像処理部において計測対象パターンの
エッジ位置を算出するための画像処理条件を入力して設定するグラフィカルユーザインタ
ーフェースを備えたことを特徴とする請求項16または22に記載の走査型透過荷電粒子
顕微鏡。 - 断面サンプル抽出位置のばらつきよりも広い範囲の計測を、比較される他の計測手法で
予め行うことで第1の計測結果を得る第1の過程と、
前記請求項1乃至11の何れか一つに記載のパターン計測方法により3次元断面形状計
測を行うことで第2の計測結果を得る第2の過程と、
前記第1の過程での第1の計測結果のうち、前記第2の過程での第2の計測結果と一致
する領域のみの計測結果を用いて計測結果の比較を行う第3の過程とを有することを特徴
とする計測装置間のキャリブレーション方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006323759A JP4791333B2 (ja) | 2006-11-30 | 2006-11-30 | パターン寸法計測方法及び走査型透過荷電粒子顕微鏡 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006323759A JP4791333B2 (ja) | 2006-11-30 | 2006-11-30 | パターン寸法計測方法及び走査型透過荷電粒子顕微鏡 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008139085A JP2008139085A (ja) | 2008-06-19 |
| JP4791333B2 true JP4791333B2 (ja) | 2011-10-12 |
Family
ID=39600722
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006323759A Expired - Fee Related JP4791333B2 (ja) | 2006-11-30 | 2006-11-30 | パターン寸法計測方法及び走査型透過荷電粒子顕微鏡 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4791333B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4627782B2 (ja) * | 2008-03-05 | 2011-02-09 | 株式会社日立ハイテクノロジーズ | エッジ検出方法、及び荷電粒子線装置 |
| JP5423612B2 (ja) * | 2010-08-16 | 2014-02-19 | 富士通株式会社 | 共焦点走査透過型電子顕微鏡装置及び3次元断層像観察方法 |
| JP2012068197A (ja) * | 2010-09-27 | 2012-04-05 | Toshiba Corp | 寸法測定方法および寸法測定装置ならびに寸法測定処理プログラム |
| JP5712074B2 (ja) | 2011-07-20 | 2015-05-07 | 株式会社日立ハイテクノロジーズ | 走査透過電子顕微鏡 |
| JP2013105603A (ja) * | 2011-11-11 | 2013-05-30 | Hitachi High-Technologies Corp | 荷電粒子線装置 |
| JP5929238B2 (ja) * | 2012-01-27 | 2016-06-01 | オムロン株式会社 | 画像検査方法および画像検査装置 |
| JP6939373B2 (ja) * | 2016-10-14 | 2021-09-22 | 住友金属鉱山株式会社 | 粉末粒子の粒径算出方法 |
| JP2019185962A (ja) * | 2018-04-06 | 2019-10-24 | 株式会社日立ハイテクノロジーズ | 荷電粒子線装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62192609A (ja) * | 1986-02-19 | 1987-08-24 | Fuji Electric Co Ltd | 微小凹凸の深さ測定方法 |
| JPH0471153A (ja) * | 1990-07-09 | 1992-03-05 | Matsushita Electric Ind Co Ltd | 走査型電子顕微鏡の断面プロファイル表示方法 |
| JP2004053550A (ja) * | 2002-07-24 | 2004-02-19 | Suruga Seiki Kk | 半導体デバイス検査装置 |
| JP4695857B2 (ja) * | 2004-08-25 | 2011-06-08 | 株式会社日立ハイテクノロジーズ | 半導体検査方法および半導体検査装置 |
| JP2006138856A (ja) * | 2005-11-14 | 2006-06-01 | Hitachi Ltd | 試料の測長方法 |
-
2006
- 2006-11-30 JP JP2006323759A patent/JP4791333B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008139085A (ja) | 2008-06-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4791333B2 (ja) | パターン寸法計測方法及び走査型透過荷電粒子顕微鏡 | |
| US7732761B2 (en) | Method for measuring a pattern dimension using a scanning electron microscope | |
| US7633061B2 (en) | Method and apparatus for measuring pattern dimensions | |
| US9702695B2 (en) | Image processing device, charged particle beam device, charged particle beam device adjustment sample, and manufacturing method thereof | |
| JP5103219B2 (ja) | パターン寸法計測方法 | |
| JP4801518B2 (ja) | 荷電粒子線顕微方法および荷電粒子線装置 | |
| EP1566766B1 (en) | Image evaluation method and microscope | |
| JP4262592B2 (ja) | パターン計測方法 | |
| US8214166B2 (en) | Method and its system for calibrating measured data between different measuring tools | |
| JP5164598B2 (ja) | レビュー方法、およびレビュー装置 | |
| WO2011013316A1 (ja) | パターン形状選択方法、及びパターン測定装置 | |
| JP2008177064A (ja) | 走査型荷電粒子顕微鏡装置および走査型荷電粒子顕微鏡装置で取得した画像の処理方法 | |
| JP2007187538A (ja) | 荷電粒子線装置及びそれを用いた画像取得方法 | |
| US20090212215A1 (en) | Scanning electron microscope and method of measuring pattern dimension using the same | |
| JP4500099B2 (ja) | 電子顕微鏡装置システム及び電子顕微鏡装置システムを用いた寸法計測方法 | |
| JP2011043458A (ja) | パターン寸法計測方法及びそのシステム | |
| WO2018061135A1 (ja) | パターン計測装置、及びコンピュータープログラム | |
| JP4231831B2 (ja) | 走査型電子顕微鏡 | |
| US11791128B2 (en) | Method of determining the beam convergence of a focused charged particle beam, and charged particle beam system | |
| JP4922710B2 (ja) | 電子顕微鏡の分解能評価用試料及び電子顕微鏡の分解能評価方法並びに電子顕微鏡 | |
| JP7455676B2 (ja) | 電子顕微鏡および電子顕微鏡のフォーカス調整方法 | |
| JP2008218259A (ja) | 検査方法及び検査装置 | |
| JP2012173028A (ja) | パターン形状計測方法及びその装置 | |
| JP5289665B2 (ja) | 薄膜評価方法及びその装置 | |
| JP2012142299A (ja) | 走査型荷電粒子顕微鏡装置および走査型荷電粒子顕微鏡装置で取得した画像の処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081211 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101029 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101109 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110111 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110419 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110616 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110705 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110721 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140729 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4791333 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |