JP4670826B2 - 制御パラメータの実験計画設定方法、その実験計画設定方法をコンピュータに実行させるためのプログラム、およびそのプログラムを記録したコンピュータ読取可能な記録媒体 - Google Patents
制御パラメータの実験計画設定方法、その実験計画設定方法をコンピュータに実行させるためのプログラム、およびそのプログラムを記録したコンピュータ読取可能な記録媒体 Download PDFInfo
- Publication number
- JP4670826B2 JP4670826B2 JP2007079329A JP2007079329A JP4670826B2 JP 4670826 B2 JP4670826 B2 JP 4670826B2 JP 2007079329 A JP2007079329 A JP 2007079329A JP 2007079329 A JP2007079329 A JP 2007079329A JP 4670826 B2 JP4670826 B2 JP 4670826B2
- Authority
- JP
- Japan
- Prior art keywords
- experimental
- point
- points
- additional
- setting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000002474 experimental method Methods 0.000 title claims description 44
- 238000000034 method Methods 0.000 title claims description 44
- 238000005259 measurement Methods 0.000 claims description 41
- 239000011159 matrix material Substances 0.000 claims description 35
- 230000004044 response Effects 0.000 claims description 15
- 239000002131 composite material Substances 0.000 claims description 12
- 238000013461 design Methods 0.000 claims description 10
- 230000008859 change Effects 0.000 claims description 6
- 238000013401 experimental design Methods 0.000 claims description 6
- 238000011156 evaluation Methods 0.000 claims description 4
- 238000003050 experimental design method Methods 0.000 claims description 3
- 238000010586 diagram Methods 0.000 description 39
- 239000000446 fuel Substances 0.000 description 18
- 230000008569 process Effects 0.000 description 14
- 238000005457 optimization Methods 0.000 description 9
- 238000002485 combustion reaction Methods 0.000 description 8
- 230000006978 adaptation Effects 0.000 description 7
- 238000004458 analytical method Methods 0.000 description 7
- 238000004364 calculation method Methods 0.000 description 5
- 239000007789 gas Substances 0.000 description 5
- 238000004519 manufacturing process Methods 0.000 description 5
- 238000012951 Remeasurement Methods 0.000 description 4
- 230000003044 adaptive effect Effects 0.000 description 4
- 238000002347 injection Methods 0.000 description 4
- 239000007924 injection Substances 0.000 description 4
- MWUXSHHQAYIFBG-UHFFFAOYSA-N Nitric oxide Chemical compound O=[N] MWUXSHHQAYIFBG-UHFFFAOYSA-N 0.000 description 3
- 239000000203 mixture Substances 0.000 description 3
- 239000000126 substance Substances 0.000 description 3
- 230000002159 abnormal effect Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 239000003054 catalyst Substances 0.000 description 1
- 239000000567 combustion gas Substances 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
Images




























Landscapes
- Testing Of Devices, Machine Parts, Or Other Structures Thereof (AREA)
- Testing Of Engines (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Description
この発明は、他の局面では、上記いずれかの制御パラメータの実験計画設定方法をコンピュータに実行させるプログラムである。
御パラメータを適合させる場合について説明する。
図1は、本発明の実施の形態に係る制御パラメータの実験計画設定方法が適用されるエンジン制御パラメータ適合システムの構成を示すブロック図である。
操作するための操作部60とを備える。
図2は、欠測点を簡単に説明するための図である。
図3を参照して、まず追加実験点の候補として制御パラメータの制御幅を4等分した点を追加する。制御幅とは、制御パラメータの設定可能な最大値と最小値の差である。追加実験点の候補は、制御パラメータを5値的に変化させる5水準の実験点の総数52からもとの3水準の実験点の数32を引いた数、つまり25−9=16である。
先順位の定め方について、説明しておくことにする。
図4に示すように、従来の実験計画法では、3の3乗、すなわち27の実験点が必要となる。
図5で示されるように、点火時期AOPは−1,0,1にそれぞれ対応して、15度(°BTDC)、25度、35度の3値を実験値として選ぶことができる。また可変バルブタイミングVVTは、−1,0,1にそれぞれ対応して、クランクアングル0度、20度、40度の3値を実験値として選ぶことができる。さらに吸気に対する排気の率EGRは、−1,0,1にそれぞれ対応して、0%、10%、20%の3値を実験値として選ぶことができる。これらの制御パラメータの設定値の組合せによって15の実験点が選択されている。各実験点をP(AOP,VVT,EGR)であらわすと、15の実験点は、P(-1,-1,-1)、P(1,-1,-1)、P(-1,1,-1)、P(1,1,-1)、P(-1,-1,1)、P(1,-1,1)、P(-1,1,1)、P(1,1,1)、P(-1,0,0)、P(1,0,0)、P(0,-1,0)、P(0,1,0)、P(0,0,-1)、P(0,0,1)、P(0,0,0)である。
する。この優先順位の設定についても行列式|XTX|で評価を行なうD最適化計画が用いられる。
図7において、☆印が計測不可点を示しており、X1,X2,X3は、それぞれ第1〜第3因子を示している。また、X1X2,X1X3,X2X3は交互作用、X1X1,X2X2,X3X3は2次成分を示す。X1、X2、X3,X1X2,X1X3,X2X3,X1X1,X2X2,X3X3および定数項は、モデル式の係数に相当する。図7における表は、計測不可点である実験点P(1,0,0)以外の実験点を行列で示したものである。中心点P(0,0,0)は3回実験を行なうので、表の最下段3行が同じ(0,0,0)になっている。図7の表を行列Xとして行列式|XTX|を計算すると、140902400.0であった。
図13において、☆印が計測不可点を示しており、X1、X2、X3は、それぞれ第1〜第3因子を示している。図13における表は、計測不可点である実験点P(-1,1,1)以外の実験点を行列で示したものである。中心点P(0,0,0)は3回実験を行なうので、表の最下段3行が同じ(0,0,0)になっている。図13の表を行列Xとして行列式|XTX|を計算すると、59699200.0であった。
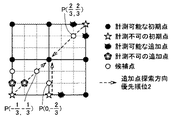
図21においては、候補点は7水準の実験点の中から選択されている。まず、欠測点P(1,1)については、2つの探索方向が採用されているので、候補点P(2/3,1)およびP(1,2/3)が選択されている。欠測点P(−1,−1)については、1つの探索方向が採用されているので、候補点P(−1,−2/3)が選択されている。欠測点P(0,−1)については、1つの探索方向が採用されているので、候補点P(1/3,−1)が選択されている。こうして、4つの候補点が設定された。
図22、図23を参照して、D最適基準の最適化計算が行なわれた結果、候補点P(2/3,2/3)、P(0,−2/3)は不採用となり、追加実験点は、P(−2/3,−2/3)、P(2/3,1)、P(1,2/3)、P(−1,−2/3)、P(1/3,−1)の5点が採用されている。
図23、図24を参照して、追加実験点P(2/3,1)、P(1,2/3)、P(1/3,−1)は計測可能であり、追加実験点P(−1,−2/3)、P(−2/3,−2/3)は計測不可であった。したがって、計測不可が発生しているので、ステップS3からステップS4に処理が進む。再計測後は探索方向の優先順位は再び優先順位1からとなる。そしてステップS4では、優先順位1の追加点探索方向が設定される。
図28には、候補点P(−1,−1/3)、P(0,−2/3)が追加実験点として採用されたことが示されている。そして、ステップS2に処理が進み、この2点の追加実験点に対して計測が行なわれる。
図29では、追加実験点P(−1,−1/3)、P(0,−2/3)は、両方とも計測可能であったことが示されている。したがって、ステップS3で計測不可が発生しなかったので、ステップS10において、このフローチャートの処理が終了する。
(1)計測済みの初期計画を再利用することにより、計測時間を低減できる。
(3)D最適基準を考慮した優先順位に基づく候補点の絞込みにより、最適化計算時間を低減し、かつ応答曲面の精度を確保できる。
Claims (7)
- 各々が複数の制御パラメータの組合せで示される実験点を、応答曲面を得るために必要な第1の数だけ設定するステップと、
設定された前記第1の数の実験点において計測された実験結果データを入力するステップと、
前記実験結果データに基づいて、前記第1の数の実験点のうちに、前記応答曲面を得るのに有効なデータが得られられなかった欠測点が存在するか否かを判断するステップと、
前記欠測点の数よりも多い第2の数の追加実験点を設定するステップとを備え、
前記第2の数の追加実験点は、前記応答曲面を得るために、前記第1の数の実験点から前記欠測点を排除した有効実験点と組合せて使用するものであり、
前記欠測点を基準として前記複数の制御パラメータをどのように変更するかについて、予め定められた複数の探索方向が予め定められた複数の優先順位に割り当てられており、
前記追加実験点を設定するステップは、
前記複数の探索方向のうち前記優先順位の高いものから順に適用して、前記欠測点の制御パラメータを変更して前記第2の数以上の第3の数となるまで前記追加実験点の候補点を設定するステップと、
前記第3の数の候補点のうちから前記第2の数の前記追加実験点を選択する組合せを各々評価して、評価結果に基づいて前記第2の数の前記追加実験点を選択するステップとを含む、制御パラメータの実験計画設定方法。 - 前記候補点を設定するステップは、適用した探索方向に前記有効実験点が存在するか否かを判断し、前記有効実験点が存在する場合に、前記適用した探索方向に基づいて制御パラメータを変更した候補点を設定する、請求項1に記載の制御パラメータの実験計画設定方法。
- 各々の実験点の間を内挿するためのモデル式の係数を列方向に並べた行を複数の実験点について行方向に順に並べた行列をXとするとき、
前記優先順位は、前記行列Xにおいて、前記欠測点に代えて前記欠測点の制御パラメータを探索方向に沿って変化させた点を加えた場合の行列式|XTX|の大きさが大きいほど高く設定される、請求項1に記載の制御パラメータの実験計画設定方法。 - 各々の実験点の間を内挿するためのモデル式の係数を列方向に並べた行を複数の実験点について行方向に順に並べた行列をXとするとき、
前記追加実験点を選択するステップは、前記複数の実験点として前記有効実験点に選択した前記第2の数の前記候補点を加えた実験点群の行列Xの行列式|XTX|の大きさが最大となるような前記候補点の組合せを追加実験点として選択する、請求項1に記載の制御パラメータの実験計画設定方法。 - 前記第1の数の実験点は、中心複合計画に基づいて定められる、請求項1に記載の制御パラメータの実験計画設定方法。
- 請求項1〜5のいずれか1項に記載の制御パラメータの実験計画設定方法をコンピュータに実行させるプログラム。
- 請求項1〜5のいずれか1項に記載の制御パラメータの実験計画設定方法をコンピュータに実行させるプログラムを記録したコンピュータ読取可能な記録媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007079329A JP4670826B2 (ja) | 2007-03-26 | 2007-03-26 | 制御パラメータの実験計画設定方法、その実験計画設定方法をコンピュータに実行させるためのプログラム、およびそのプログラムを記録したコンピュータ読取可能な記録媒体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007079329A JP4670826B2 (ja) | 2007-03-26 | 2007-03-26 | 制御パラメータの実験計画設定方法、その実験計画設定方法をコンピュータに実行させるためのプログラム、およびそのプログラムを記録したコンピュータ読取可能な記録媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008241337A JP2008241337A (ja) | 2008-10-09 |
| JP4670826B2 true JP4670826B2 (ja) | 2011-04-13 |
Family
ID=39912889
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007079329A Expired - Fee Related JP4670826B2 (ja) | 2007-03-26 | 2007-03-26 | 制御パラメータの実験計画設定方法、その実験計画設定方法をコンピュータに実行させるためのプログラム、およびそのプログラムを記録したコンピュータ読取可能な記録媒体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4670826B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5047144B2 (ja) * | 2008-12-19 | 2012-10-10 | 三菱重工業株式会社 | マップ作成支援装置およびその方法並びにプログラム |
| JP5233660B2 (ja) * | 2008-12-24 | 2013-07-10 | トヨタ自動車株式会社 | 内燃機関の制御パラメータの適合方法 |
| JP7496498B2 (ja) | 2020-08-27 | 2024-06-07 | パナソニックIpマネジメント株式会社 | 情報処理方法、プログラム、および情報処理装置 |
| JP7496497B2 (ja) | 2020-08-27 | 2024-06-07 | パナソニックIpマネジメント株式会社 | 情報処理方法、プログラム、および情報処理装置 |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11150047A (ja) * | 1997-11-17 | 1999-06-02 | Matsushita Electron Corp | 半導体装置の製造方法 |
| JP2000132535A (ja) * | 1998-10-23 | 2000-05-12 | Mitsubishi Electric Corp | 最適パラメータ組合せ予測方法、およびそのプログラムを記録した記録媒体と装置 |
| JP2002259464A (ja) * | 2001-02-28 | 2002-09-13 | Toshiba Corp | 実験計画法の支援装置、方法及びプログラム |
| JP2002322638A (ja) * | 2001-04-26 | 2002-11-08 | Taisei Corp | 砂質地盤締固め工法 |
| JP2003500717A (ja) * | 1999-05-25 | 2003-01-07 | シーメンス アクチエンゲゼルシヤフト | 技術システムを設計する方法、装置及びコンピュータプログラム |
| JP2003013794A (ja) * | 2001-04-24 | 2003-01-15 | Denso Corp | 車両用制御パラメータの適合方法及び適合装置 |
| JP2004068729A (ja) * | 2002-08-07 | 2004-03-04 | Toyota Motor Corp | エンジン制御パラメータの適合方法及び適合システム |
| JP2004118719A (ja) * | 2002-09-27 | 2004-04-15 | Toshiba Corp | 多目的設計最適化支援方法及び多目的設計最適化支援プログラム |
| JP2004263680A (ja) * | 2003-03-04 | 2004-09-24 | Denso Corp | エンジン失火領域推定方法及びエンジン制御パラメータ適合方法並びにエンジン失火領域推定装置及びエンジン制御パラメータ適合装置 |
| JP2006017698A (ja) * | 2004-06-03 | 2006-01-19 | Toyota Motor Corp | エンジン制御パラメータの実験計画設定方法、その実験計画設定方法をコンピュータに実行させるためのプログラム、そのプログラムを記録したコンピュータ読取可能な記録媒体およびエンジン制御パラメータの実験計画設定装置 |
| JP2006048120A (ja) * | 2004-07-30 | 2006-02-16 | Toshiba Corp | 最適値探索支援装置、最適値探索支援方法、及び記録媒体 |
| JP2007257380A (ja) * | 2006-03-23 | 2007-10-04 | Toyota Central Res & Dev Lab Inc | 最適パラメータ探索方法およびそのプログラム |
-
2007
- 2007-03-26 JP JP2007079329A patent/JP4670826B2/ja not_active Expired - Fee Related
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11150047A (ja) * | 1997-11-17 | 1999-06-02 | Matsushita Electron Corp | 半導体装置の製造方法 |
| JP2000132535A (ja) * | 1998-10-23 | 2000-05-12 | Mitsubishi Electric Corp | 最適パラメータ組合せ予測方法、およびそのプログラムを記録した記録媒体と装置 |
| JP2003500717A (ja) * | 1999-05-25 | 2003-01-07 | シーメンス アクチエンゲゼルシヤフト | 技術システムを設計する方法、装置及びコンピュータプログラム |
| JP2002259464A (ja) * | 2001-02-28 | 2002-09-13 | Toshiba Corp | 実験計画法の支援装置、方法及びプログラム |
| JP2003013794A (ja) * | 2001-04-24 | 2003-01-15 | Denso Corp | 車両用制御パラメータの適合方法及び適合装置 |
| JP2002322638A (ja) * | 2001-04-26 | 2002-11-08 | Taisei Corp | 砂質地盤締固め工法 |
| JP2004068729A (ja) * | 2002-08-07 | 2004-03-04 | Toyota Motor Corp | エンジン制御パラメータの適合方法及び適合システム |
| JP2004118719A (ja) * | 2002-09-27 | 2004-04-15 | Toshiba Corp | 多目的設計最適化支援方法及び多目的設計最適化支援プログラム |
| JP2004263680A (ja) * | 2003-03-04 | 2004-09-24 | Denso Corp | エンジン失火領域推定方法及びエンジン制御パラメータ適合方法並びにエンジン失火領域推定装置及びエンジン制御パラメータ適合装置 |
| JP2006017698A (ja) * | 2004-06-03 | 2006-01-19 | Toyota Motor Corp | エンジン制御パラメータの実験計画設定方法、その実験計画設定方法をコンピュータに実行させるためのプログラム、そのプログラムを記録したコンピュータ読取可能な記録媒体およびエンジン制御パラメータの実験計画設定装置 |
| JP2006048120A (ja) * | 2004-07-30 | 2006-02-16 | Toshiba Corp | 最適値探索支援装置、最適値探索支援方法、及び記録媒体 |
| JP2007257380A (ja) * | 2006-03-23 | 2007-10-04 | Toyota Central Res & Dev Lab Inc | 最適パラメータ探索方法およびそのプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008241337A (ja) | 2008-10-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4453581B2 (ja) | エンジン制御パラメータの実験計画設定方法、その実験計画設定方法をコンピュータに実行させるためのプログラム、そのプログラムを記録したコンピュータ読取可能な記録媒体およびエンジン制御パラメータの実験計画設定装置 | |
| Powell | A review of IC engine models for control system design | |
| WO2000009876A1 (fr) | Dispositif de reglage de la combustion dans un moteur | |
| JP2011106334A (ja) | Wiebe関数モデルを用いたエンジンの熱発生率の推定方法 | |
| EP3135888B1 (en) | Internal combustion engine heat generation rate waveform calculation device and heat generation rate waveform calculation method | |
| JP4670826B2 (ja) | 制御パラメータの実験計画設定方法、その実験計画設定方法をコンピュータに実行させるためのプログラム、およびそのプログラムを記録したコンピュータ読取可能な記録媒体 | |
| US9885295B2 (en) | Heat generation rate waveform calculation device of internal combustion engine and method for calculating heat generation rate waveform | |
| JP2006244042A (ja) | エンジン制御パラメータの適合方法及び適合装置 | |
| Middleton et al. | Fuel efficiency estimates for future light duty vehicles, part a: Engine technology and efficiency | |
| JP2007248119A (ja) | Wiebe関数パラメータの決定方法および内燃機関の熱発生率推定装置 | |
| US10196974B2 (en) | Heat generation rate waveform calculation device of internal combustion engine and method for calculating heat generation rate waveform | |
| JP4042492B2 (ja) | エンジン制御パラメータの適合方法及び適合システム | |
| JP2007126997A (ja) | 筒内熱発生のシミュレーション方法およびシミュレーション装置 | |
| JP2004263680A (ja) | エンジン失火領域推定方法及びエンジン制御パラメータ適合方法並びにエンジン失火領域推定装置及びエンジン制御パラメータ適合装置 | |
| Wang et al. | Model-based combustion duration and ignition timing prediction for combustion phasing control of a spark-ignition engine using in-cylinder pressure sensors | |
| US7334567B2 (en) | Method for operating an internal combustion engine | |
| JP2009210426A (ja) | エンジン制御パラメータの適合方法および適合装置 | |
| JP2012013637A (ja) | エンジン制御パラメータの適合方法及び適合装置 | |
| JP5233660B2 (ja) | 内燃機関の制御パラメータの適合方法 | |
| Koegeler et al. | DGI-engine calibration, using new methodology with CAMEO | |
| JP4998402B2 (ja) | 内燃機関の制御装置 | |
| JP4577239B2 (ja) | Wiebe関数パラメータの決定方法および決定装置 | |
| JPH07332149A (ja) | 内燃機関の燃焼制御装置 | |
| JP2009209779A (ja) | エンジン制御パラメータの適合方法および適合装置 | |
| JP4748461B2 (ja) | 筒内噴射エンジンの噴射時期適合方法及び噴射時期適合装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100614 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101019 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101111 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101221 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110103 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140128 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |