JP4660042B2 - 補正値テーブル作成、検査変数決定および車輪タイヤ圧力低下識別のための方法 - Google Patents
補正値テーブル作成、検査変数決定および車輪タイヤ圧力低下識別のための方法 Download PDFInfo
- Publication number
- JP4660042B2 JP4660042B2 JP2001504750A JP2001504750A JP4660042B2 JP 4660042 B2 JP4660042 B2 JP 4660042B2 JP 2001504750 A JP2001504750 A JP 2001504750A JP 2001504750 A JP2001504750 A JP 2001504750A JP 4660042 B2 JP4660042 B2 JP 4660042B2
- Authority
- JP
- Japan
- Prior art keywords
- variable
- vehicle
- wheel
- value
- correction value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60C—VEHICLE TYRES; TYRE INFLATION; TYRE CHANGING; CONNECTING VALVES TO INFLATABLE ELASTIC BODIES IN GENERAL; DEVICES OR ARRANGEMENTS RELATED TO TYRES
- B60C23/00—Devices for measuring, signalling, controlling, or distributing tyre pressure or temperature, specially adapted for mounting on vehicles; Arrangement of tyre inflating devices on vehicles, e.g. of pumps or of tanks; Tyre cooling arrangements
- B60C23/06—Signalling devices actuated by deformation of the tyre, e.g. tyre mounted deformation sensors or indirect determination of tyre deformation based on wheel speed, wheel-centre to ground distance or inclination of wheel axle
- B60C23/061—Signalling devices actuated by deformation of the tyre, e.g. tyre mounted deformation sensors or indirect determination of tyre deformation based on wheel speed, wheel-centre to ground distance or inclination of wheel axle by monitoring wheel speed
Description
本発明は、独立請求項の前提部分に記載した、補正値テーブルを作成するため、検査変数を決定するためおよび車輪のタイヤの圧力低下を識別するのための方法に関する。このような圧力低下識別方法はドイツ連邦共和国特許出願公開第19721480号公報によって公知である。
【0002】
図6に基づいて、基本的な物理的関係を説明する。61は道路60上の普通の車輪を示している。車輪中心63は車体と共に移動し車速vFで移動する。一般的に当てはまる関係、すなわち角速度ωで回転する円板上における、回転中心から半径Rだけ離れた点の軌道速度vとの関係、つまりω=v/Rに相応して、図6の左側でωr=vF/Rrが生じる。車輪の場合、角速度ωは車輪センサによって検出可能であり、車速vは一般的にセンサで検出不可能である。圧力低下時に、車輪の動的転動外周が変化する。車輪は標準状態または圧力低下していない車輪と比べて速く回転する。
【0003】
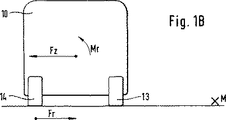
車輪の角速度に付加的な影響を与え得る。その際、発生する個々の車輪の角速度の差が一方の車輪の圧力低下を示さない。その例は、トラクションスリップ、カーブ走行時の異なるジオメトリー、車両の非対称の荷重分布等である。図1A〜1Cを参照して、特にカーブ走行時または駆動されるケースでの走行ダイナミクス(走行動特性)から生じる2つの作用について説明する。
【0004】
図1Aは、左前輪11、右前輪12、右後輪13および左後輪14を備えた車両10を示している。車両は速度vFでカーブを右側に走行する。この場合、車両重心Sは中心M回りに半径Rで移動すると仮定する。車両右側の車輪12,13は内側軌道に沿って走行し、従ってほぼ同じ小さな内側半径Riの軌道を有する。一方、車両左側の車輪11,14は外側の軌道に沿って走行し、従って大きな外側半径Raのカーブに沿って走行する。この車輪は同じ時間で長い距離を進まなければならないので、カーブ外側の車輪11,14はカーブ内側の車輪12,13よりも大きな軌道速度となり、従って大きな角速度を有する。しかし、この差は一方の車輪の圧力低下の原因にならない。
【0005】
図1Bを参照して他の作用について説明する。図1Aに示した車両はここでは後側から示してある。図1Aに示した車両と同じ軌道(右側へのカーブ、すなわち図1Bにおいて図面の平面内で右側へのカーブ)が、中心M回りに半径Rで生じる。カーブ走行に基づいて、車両重心Sに作用する遠心力Fzが発生する。これに抵抗する力は車輪と道路の間の摩擦力Frである。この力が同じ平面内で作用しないので、ローリングトルクMrが図示した状況で車両の縦軸線を中心に半時計回りに生じる。そのため、カーブ外側の車輪11,14がカーブ内側の車輪12,13よりも大きく負荷される。それによって、カーブ外側の車輪は強く圧縮され、小さな動的転動半径、ひいては大きな角速度を生じる。図1Bの作用は図1Aに基づいて説明した作用と同じ方向に向くので、これらの作用は加算される。
【0006】
図1Cは車両がエンジン16によって駆動されて道路15上を移動している状況を示している。その際、図1の例では、後車軸が駆動されるので、その車輪13,14はトラクションスリップとブレーキングスリップを発生し、前車軸の車輪11,12はブレーキングスリップだけを発生し得る。特に駆動されるケースでは、前車軸の車輪11,12は自由に転動し、それによって角速度ω=vF/rを有する。一方、後車軸の車輪は頻繁に大きな値を有する。なぜなら、既に述べた値ωに車輪スリップωsが加算されるからである。この作用もタイヤの圧力低下に基づく異なる角速度とは関係がない。
【0007】
従って、図1A〜1Cによる外乱作用を除去することが重要である。そのために、ドイツ連邦共和国特許出願公開第19721480号公報では、車輪速度が対をなして加算され、合計が互いに比べられてその値の商がチェックされる方法が提案されている。特に、1つずつの対角線上にある車輪の車輪速度が加算され、その結果が割り算される。そして、理想的な値1(すべての車輪の一定速度)から多少ずれる商が生じる。特に圧力低下したタイヤが存在するときには、分数の分子または分母に非常に小さな値が生じるので、商も理想的な値1から上方または下方に大きくずれる。そして、場合によっては圧力低下した1個の車輪を識別するために、他の検査を行うことができる。互いに対角線上にある車輪の値を考慮または加算することにより、カーブ形状またはトラクションスリップの作用がしばしば相殺される。他方では、この相殺が常に確実に行われるとは限らないので、誤識別を回避するために、比較的に大きな許容誤差を選定しなければならない。それによって、識別が比較的に遅れて達成される。カーブ走行時に例えばデファレンシャルロックは、いろいろなカーブ形状に基づく作用の相殺を妨害し得る。車軸がロックすると、その車輪は同じ軌道速度および角速度で走行するので、その都度他のパートナーとの合計の際に、非対称の相殺に寄与することができない。
【0008】
本発明の課題は、タイヤの圧力低下の確実な識別を可能にする、検査変数を決定し、車輪のタイヤの圧力低下を識別するための方法を提供することである。
【0009】
この課題は独立請求項記載の特徴によって解決される。従属請求項は本発明の有利な実施形である。
【0010】
車両のタイヤの圧力低下を識別するための検査変数の補正値テーブルを作成するための方法の場合、検査変数のための個々の補正値が決定され、補正値決定中または補正値決定の時点の走行ダイナミクス変数の値に依存して記憶される。それによって、時間の経過につれて補正値のテーブルが生じる。テーブルの入力値が走行ダイナミクス変数であり、出力値が走行ダイナミクスに依存する補正値であるので、検査変数は車両のタイヤの圧力低下を識別するために走行ダイナミクスに依存して補正可能である。
【0011】
補正値の決定は学習プロセスである。補正値の決定は、値または値の時間的な変化に関する車両ダイナミクス、特に走行ダイナミクス、言わば絶対的または相対的な所定条件を満足するときに行うことができる。特に、車両ダイナミクスまたは特に走行ダイナミクスが或る恒常性を示すこと(時間ウインドウ内の値範囲内で)あるいは走行ダイナミクスの変化が閾値よりも小さいことが要求される。検査変数は複数の車輪半径またはこの車輪半径に対応する変数から決定可能である。例えば検査変数は2つずつの車輪半径の2つの合計の商である。
【0012】
走行ダイナミクス変数の値領域は、複数の領域に分けることができる。走行ダイナミクス変数の値をデジタルで示す場合には、領域の分割はデジタルの量子化によって生じ得る。走行ダイナミクス変数の個々の値または複数の値について、補正値が上記のように決定される。走行ダイナミクス変数の他の値については、補正値が適当な方法で外挿によって決定可能である(線形、一般的には多項式)。
【0013】
走行ダイナミクス変数は車輪トルクおよびまたはカーブ特性値でもよい。検査変数は車両の複数の値の変数から決定可能である。検査変数は特にこのような変数の2つの合計の商である。
【0014】
次に、図を参照して、本発明の個々の実施の形態を説明する。
【0015】
図3において、30は補正値テーブルを作成(準備)するための装置全体を示している。この装置はセンサ31,32からセンサ信号を受け取る。この場合、図3において、31は4個の車輪センサ(各々の1個の車輪に1個ずつ)を示し、32は例えば加速度センサ、ヨーレイトセンサ、操舵角センサ、変速機センサ、エンジン回転数センサ等のような他のセンサを示している。通常は、いろいろな処理段(変換、ろ波、正規化)を通過したデジタルデータである。このデータは車両データバス37から取り出すことができる。
【0016】
33は走行ダイナミクス変数(走行動特性変数)を決定するための第1の決定装置を示している。第1の決定装置33は特に車輪信号と場合によっては他のセンサ信号または他の制御要素からの状態変数を受け取り、それから車両の走行ダイナミクス変数を決定する。装置は例えば車輪トルクおよびまたはカーブ特性値を決定することができる。
【0017】
第1の決定装置33は走行ダイナミクス変数の値を、通常はデジタル変数として決定する。デジタル化に基づいて生じるこの量子化によって既に、走行ダイナミクス変数の最大値領域の領域分割が行われる。領域分割は希望に応じて多少大まかでもよい。カーブ特性値の場合、3つの領域、すなわち左側、真っ直ぐ、右側の領域を選定することで充分である。勿論、より細かく段階を付けることができる。走行ダイナミクス変数が駆動トルクであるときにも、同じことが当てはまる。この場合、上記の方法が駆動されるケース(車輪トルクが0よりも大きい)のみ行われる実施の形態でもよい。なぜなら、駆動されない車輪が自由に転動するということから出発することができるからである。
【0018】
他の実施の形態では、クラッチ連結解除ケース、非駆動ケースおよびブレーキの非制動ケースにおいて、すなわち全輪が自由に転動するときに、方法が適用される。
【0019】
34は補正値を決定し記憶するための第2の決定装置を示している。この記憶は、補正値決定のときの走行ダイナミクス変数の値に依存してメモリ35で行われる。第2の決定装置34は同様に、車輪信号と他のセンサ信号を受け取ることができる。第2の決定装置は比較的に複雑な検査ステップと決定ステップを行う。第2の決定装置自体は補正される検査変数を受け取ることができる(ブロック36によって示してある)。第2の決定装置では、第1の決定装置33からの検査変数36およびまたは走行ダイナミクス変数の時間的な変化(例えば微分、時間ウインドウ内の変動)またはこの変数の値が、閾値を上回ったかどうかまたは下回ったどうかを検査可能である。第2の決定装置34は検査変数のための補正値を決定する。補正値は走行ダイナミクス変数の所定の値のために決定されるので、通常は、補正値の決定の間走行ダイナミクス変数が考慮される値範囲内にとどまるかまたは短時間だけあるいは少しだけこの値範囲を逸脱することが要求される。
【0020】
補正値を決定した後で、この補正値は、走行ダイナミクス変数の値に依存してメモリ35に書き込まれる。走行ダイナミクス変数の(デジタル)値は、記憶場所のアドレスとしての役目を果たすことができるかまたはアドレス決定に関与することができる。38は補正値のためのデータラインを示し、39は走行ダイナミクス変数を反映するアドレスラインを示している。
【0021】
テーブルの個々の項目は入手できるように決定される。走行ダイナミクス変数の調節は通常は、運転者によって調節された状態によって行われる。その他の条件が許す場合に、走行ダイナミクス変数のそれぞれの値について、補正値が決定される。従って、時がたつうちにテーブルが形成される。走行ダイナミクス変数の所定の値について、走行ダイナミクス変数の他の値について当てはまる決定された補正値から、例えば線形外挿または二次外挿によって補正値を推定することができる。外挿された値は後で決定された値によって上書きすることができる。
【0022】
補正値テーブルの実施の形態では、検査変数に対するカーブ特性値の比が決定され、記憶される。
【0023】
補正値決定は一般的に学習プロセスである。この学習プロセスでは、走行状況による条件を検査することによって、所望な誤差変数だけが学習した補正値に表現され、その他の変数が表現されないことが保証される。
【0024】
メモリ35は揮発性メモリである。この揮発性メモリの値は、通電が遮断されるときに(車両の停止またはそのバッテリの取外し)失われる。しかし、非揮発性メモリでもよい。それによって、メモリ35内の学習した値は、通電が遮断されても消えない。
【0025】
記憶された補正値は、タイヤ圧力の検査変数を補正する役目を果たす。その際、検査変数は、いずれかの車輪の圧力低下の存在を質的に指摘するがしかし、どの車輪が実際に圧力低下しているかという具体的な指摘をしなくてもよい。特に、検査変数は、少なくとも2個の車輪の車輪半径から値を決定する変数であってもよい。車輪半径の代わりに、車輪半径を表す変数、例えば車輪速度を使用してもよい。質的に異なる多数の検査変数が存在するので、複数の異なる補正値テーブルを作成すべきであろう。
【0026】
検査変数は2つの合計の商であってもよい。この場合、各々の合計は車両の4個の車輪のうちの2個の車輪半径から求められる。その際、合計は対をなす異なる車輪半径を含んでいる。一方の合計は車両の両前輪半径から、他方の合計は車両の両後輪半径から求めることができる。この両合計の商は検査変数を形成する。この検査変数のために、上述のように、走行ダイナミクス変数の値に依存して、補正値テーブルを形成するための補正値が決定される。この補正値テーブルの入力値は走行ダイナミクス変数の値である。
【0027】
車両の左側の両車輪半径の合計と車両の右側の両車輪半径の合計との商として、質的に異なる検査変数を求めることができる。
【0028】
上記のすべての検査変数では、タイヤ圧力低下に基づいて小さくなり、それに伴って速く回転する車輪が、標準値からの商の偏差を生じるので、この偏差に基づいてタイヤ圧力低下を検出することができる。
【0029】
走行ダイナミクス変数は車輪トルクでもよいし、1つまたは複数の車輪トルクに関連して決定された変数(例えば平均値、最大値または最小値)でもよい。車輪トルクは例えば測定されたエンジン出力トルクと、エンジンと車輪の間の変速比に関連して決定可能である。基本的には、エンジントルクは発生したエンジントルク−摩擦トルクから導き出すことができる。
【0030】
変速比はエンジン回転速度と車輪回転速度によって決定可能である。それによって、クラッチ切断状態が考慮される。この情報はデータバスから入手可能であるかまたはこの情報は妥当性分析から得ることができる。
【0031】
車輪トルクを決定する際に、エンジンと変速機の摩擦トルクを一緒に考慮することができる。
【0032】
走行ダイナミクス変数はカーブ特性値でもよい。そのために特に、1つまたは複数の次の変数を考慮することができる。ヨーレイト(センサまたは決定装置からの、垂直軸線回りの角速度)、車速または車両加速度と関連するカーブ半径、車速または車両加速度と関連する操舵角、横方向加速度(センサまたは決定装置からの)。カーブ特性値は車輪信号およびまたは他のセンサ信号または決定された信号から決定することができる。カーブ特性値は冗長的に発生可能である。カーブ特性値決定装置は、一次的に車輪信号に関連して処理され、しかし例えば車輪信号が外乱を受けているときには、カーブ特性値決定が他の信号に関連して行われるように設計可能である。カーブ特性値がヨーレイトセンサおよびまたは速度センサの信号に関連して決定される場合には、車両の後退走行がエラーを生じないように配慮すべきである。場合によっては、正負符号を逆にしなければならない。
【0033】
補正値テーブルの作成は更に、一般的な条件に依存して行うこともできる。例えば所定のキロメータレベルのときまたはその後で作成を行うことができる。作成は更に、運転者の要求に応じて行われるようにすることができる。一般的に、実際のタイヤ圧力低下を補正係数として学習することを阻止しない条件を選択することができる。この学習はタイヤ圧力低下の非検出をもたらすことになる。他方では、個々の補正値の時間的な変化を追跡することができる。補正値が所定の時間内(例えば2時間内で)およびまたは所定の走行距離内(例えば150km内)で連続的に一方向に変化するときには、これは、実際の圧力低下が誤って補正値として学習されていることを示す。これはアラームを生じることになる。
【0034】
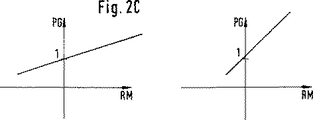
図2A〜2Cはいろいろな走行ダイナミクス変数に依存して、例えばカーブ特性値KKG(図2A,2B)に依存してあるいは車輪トルクRM(図2C)に依存して、いろいろな検査変数PGの理想的な変化と実際の変化を示している。
【0035】
図2Aは左側に検査変数の理想的な変化を示している。この検査変数は次式に従って計算された。
【0036】
PG=(r11+R14)/(r12+R13)
ここで、値rはそれぞれ車輪半径または対応する値(例えば角速度、この場合この角速度が半径に反比例することを考慮すべきである)であり、添字の数字は図1Aの参照数字に対応して個々の車輪を識別するために付けられている。理想的な変化(左側)では、検査変数PGがカーブ特性値0のときに(直線走行)値1を有する。というのは、理想的な場合、すべての車輪が同じ車輪半径で同じ速さで回転するので、分子と分母が同じ値をとり、その商が値1となるからである。しかし、いろいろな理由から、実際の変化は異なる。しかも、零点と勾配が異なる。この実際の変化は図2Aの右側に示してある。検査変数はすり減った異なるタイヤまたは非対称の車両荷重によって、もはや点0/1を通過せず、更に傾きが異なる。基本的には、カーブ特性値が質的にのみ示されることが指摘される。変化は直線に類似しないかもしれない。しかし、カーブ特性値を経て、単調な挙動(上昇または下降)を予想しなければならない。この挙動は最終的に、図1Aで説明した幾何学的な関係に基づいていろいろな車輪速度を反映する。
【0037】
図2Bは次式に従って決定された検査変数PGの理想的な変化と実際の変化を示している。
【0038】
PG=(r11+R13)/(r12+R14)
ここで、その都度対角線の値が加算され、その合計の商が計算された。理想的な変化(図2Bの左側)では、いろいろな幾何学的な状態が相殺されるので、直線的な変化が縦軸で点1を通ることが予想される。ここでも、圧力低下に起因しないいろいろな外乱に基づいて、他の実際の変化が生じる。一例が図2Bの右側に示してある。しかし、検査変数は点0/1を通らず、ここでも所定の傾きを有する。この場合、直線が必ずしも検査変数の正しい変化を反映しなくてもよいことを再び指摘する。
【0039】
図2Cは車輪トルクに依存して検査変数PGの変化を示している。この場合、検査変数は次式に従って決定された。
【0040】
PG=(r11+R12)/(r13+R14)
駆動されるケース(車輪トルクが正であると見なされる)だけを考慮する場合、特性曲線の変化は正の車輪トルクについてのみ生じる。理想的な変化(図2Cの左側)では、車輪トルク0について値1が生じる。というのは、すべての車輪が同じ半径で自由に、ひいては同じ速さで転動するので、分数の分子と分母に同じ値が生じるからである。ここでも、実際のケース(図2Cの右側)では、偏差が生じる。駆動されないケースでは、値は0でなくてもよい。しかも他の変化(直線の傾き)が異なっていてもよい(図2Cの右側参照)。惰性走行中は特性曲線変化はマイナスの車輪トルクについてのみ生じる。
【0041】
図2A〜2Cにおいてそれぞれ右側に示した実際の変化は、理想的なケースからの偏差を示している。この偏差はいろいろな原因の二次的な外乱に基づいて発生する(すり減ったタイヤ、非対称の車両荷重)。この二次的な外乱は一次的な外乱(カーブ形状、転動トルク、トラクションスリップ)に加えて、場合によって検出されるタイヤの圧力低下と関係ない、理想的なケースからの検査変数の偏差を生じ得る。補正値の学習によって、この他の影響量が除去される。
【0042】
図4は車両のタイヤの圧力に関する検査変数を決定するための装置を示している。この装置は、検査変数のメモリ35に記憶される補正値テーブルを作成するための作成装置30を備えている。この作成装置30は上述のようにまたは図3に示すように設計可能である。検査変数決定装置は更に、走行ダイナミクス変数を決定するための第2の決定装置41を備えている。この場合、走行ダイナミクス変数はメモリ35に格納された補正値テーブルのための入力値として必要となる走行ダイナミクス変数である。第2の決定装置41は第1の決定装置33と同じ決定装置でもよい。
【0043】
第3の決定装置42は、従来のごとく例えば複数の車輪の半径に関する変数を決定することにより、走行ダイナミクス変数を決定する。そのために、公知の方法を用いることができる。合計から上記の商を求めることができる。
【0044】
読取り装置43はメモリ35内の補正値テーブルから、第2の決定装置41で決定された走行ダイナミクス変数に応じて、補正値を読み出す。
【0045】
補正装置44は第2の決定装置41によって決定された検査変数の値を補正する。補正値は加算される値でもよいし、係数でもよい。決定された値にこの値が加算されるかまたは係数が掛けられる。検査変数が2つの“対称的な”合計の商であるときには、理想的な値は1である。実際の値はそれと相違することがあり、例えば0.97である。補正値を適用することにより、検査変数の値は再び例えば1.00になるであろう。
【0046】
図5は車輪のタイヤの圧力低下を識別するための装置を示している。この識別装置はタイヤ圧力の検査変数を決定するための決定装置40を備えている。この決定装置は上述のようにおよび特に図4に概略的に示すように形成可能である。決定装置は補正された検査変数を決定する。この場合、車両の複数の車輪の車輪半径に関する検査変数が決定される。
【0047】
識別装置は更に、比較装置51を備えている。この比較装置は補正された検査変数を、1つまたは複数の閾値と比較する。補正後もまだ存在する偏差は、分数の分子または分母が圧力低下に基づいて変化した値を示すので、その結果商も変化していることを示す。分子または分母に変化が存在し得るので、検査変数は、標準値の上方にある閾値を上回っているかどうかおよび標準値の下方にある閾値を下回っているかどうかをチェックすることができる。閾値は55によって示してある。この閾値チェックの場合にも、補正された検査変数の個々の異常値が誤った識別につながることを防止するために、時間的な考察を行うことができる。検査変数自体(補正された検査変数または補正されていない検査変数)を更に処理することができる。例えば時間ウインドウにわたって低域ろ波するかまたは平均値を求めることによって、ろ波または平滑化することができる。特性曲線装置53で行われる閾値チェックの際の時間的な考察は、“異常条件”が所定の時間よりも長く続くかどうかあるいは所定の第1の時間内で所定の小さな第2の時間よりも長く続くかどうかのチェックを含むことができる。
【0048】
検査変数が閾値に達するかまたは通過すると、これは圧力低下の存在を示す。車両の複数の車輪半径に関する検査変数が決定される場合には、この検査から、どの車輪が実際に圧力低下しているかを推測することはできない。しかし、上側の閾値を上回ったかどうかあるいは下側の閾値を下回ったかどうかの情報から、どちらの対の車輪が圧力低下しているかを導き出すことができる。その際場合によっては、圧力低下している具体的な車輪を決定するために質的に異なる他の検査変数を使用することができる。
【0049】
補正値決定と検査変数決定および圧力低下識別は、速度に依存して行うことができる。それによって、補正値テーブルを作成するときに、車速が他のテーブル入力であってもよい。
【0050】
チェックの結果、検査変数が閾値に達したかまたは通過したことが判ると、これは圧力低下の最初の推測と見なすことができる。そして他の処理で、この推測に基づいて、圧力低下識別の感度が低下するように、検査閾値を変更装置54によって変更することができる。そして特に所定の時間内にまたは距離ウインドウ内で、変化した閾値に再び達するかまたは通過するときに、圧力低下が認識され、アラームが発せられる。
【0051】
カーブ特性値が車輪トルクである場合には、検査変数は、前側車輪半径の合計と後側車輪半径の合計の商であってもよい。圧力低下が最初に推測されるときに、他の識別プロセスのための閾値が、駆動される車軸と駆動されない車軸とで異なるように修正されるように、閾値に影響を及ぼすことができる。この修正は同様に、車輪トルクおよびまたは車両の変速段に依存して行うことができる。
【図面の簡単な説明】
【図1】 1A〜1Cは外乱の影響を説明するための図である。
【図2】 検査変数の理想的な変化と実際の変化を示す図である。
【図3】 補正値テーブル作成装置のブロック図である。
【図4】 タイヤ圧力の検査変数を決定するためのの装置のブロック図である。
【図5】 車輪のタイヤの圧力低下を識別するための装置を示す図である。
【図6】 物理的な関係を説明するための図である。
Claims (13)
- 車両のタイヤの圧力低下を識別するための検査変数の補正値テーブルを作成するための方法であって、
車両の少なくとも1つの走行ダイナミクス変数を決定し、そして
補正値決定時の走行ダイナミクス変数の値に依存して検査変数の補正値を決定し、そして記憶する前記方法において、
前記走行ダイナミクス変数のうち少なくとも1つを、エンジントルクと変速比から決定される車輪トルクとするとともに、前記検査変数を、2つずつの車輪半径の合計またはこの車輪半径を反映する2つずつの変数の合計の商により算出すること、及び
前記検査変数を閾値と比較し、該検査変数が閾値に達するか又は超過するときに圧力低下を認識し、駆動される車輪の1つの圧力低下が推測されるときに、圧力低下識別の感度が良くなるように、前記閾値が変更されること
を特徴とする方法。 - 走行ダイナミクスがその値および/またはその時間的な変化に関して所定の条件を満足するときに初めて、補正値が決定されることを特徴とする請求項1記載の方法。
- 走行ダイナミクスが所定の時間にわたって所定の値範囲にとどまるときに初めて、補正値決定または補正値記憶が行われることを特徴とする請求項2記載の方法。
- 車両の前側の車輪の変数に関する合計と、車両の後側の車輪の変数に関する他の合計が求められることを特徴とする請求項1〜3の何れか1項に記載の方法。
- 車両の右側の車輪の変数に関する合計と、車両の左側の車輪の変数に関する他の合計が求められることを特徴とする請求項1〜4の何れか1項に記載の方法。
- 車両の一方の対角線の車輪の変数に関する合計と、車両の他方の対角線の車輪の変数に関する他の合計が求められることを特徴とする請求項1〜5のいずれか一つに記載の方法。
- 走行ダイナミクス変数の複数の値のために補正値が決定され、走行ダイナミクス変数の他の値のために、決定された補正値から補正値が外挿されることを特徴とする請求項1〜6のいずれか一つに記載の方法。
- 変速比がエンジン回転数と車輪速度から決定されることを特徴とする請求項1記載の方法。
- 走行ダイナミクス変数がカーブ走行時に得られるカーブ特性値であることを特徴とする請求項1〜8のいずれか一つに記載の方法。
- カーブ特性値として、次の変数
ヨーレイトおよび車速または車両加速度に関連するヨーレイト、
車速または車両加速度に関連するカーブ半径、
車速または車両加速度に関連する操舵角、
横方向加速度および車速または車両加速度に関連する横方向加速度
の1つまたは複数を用いることが可能であることを特徴とする請求項9記載の方法。 - 特性値記憶が複数のカーブ特性値に依存して行われることを特徴とする請求項10記載の方法。
- 4個の車輪の車輪半径またはこの車輪半径を反映する変数から検査変数を決定する、
車両のタイヤの圧力低下を識別するための補正された検査変数を決定するための方法において、
請求項1〜11のいずれか一つに記載の方法によって、補正値テーブルを作成し、
車両の走行ダイナミクスを決定し、
走行ダイナミクス変数の値に応じてテーブルから補正値を読み出し、そして
補正値によって検査変数を補正する
ことを特徴とする方法。 - タイヤの圧力低下を識別するための方法において、
請求項12記載の方法によって、車両のタイヤの圧力低下を識別するための検査変数を決定することを特徴とする方法。
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE19928137.8 | 1999-06-19 | ||
| DE19928138.6 | 1999-06-19 | ||
| DE19928138 | 1999-06-19 | ||
| DE19928137 | 1999-06-19 | ||
| DE19959554A DE19959554A1 (de) | 1999-06-19 | 1999-12-10 | Verfahrfen und Vorrichtung zur Erstellung einer Korrekturwerttabelle, zur Ermittlung einer Prüfgröße und zur Erkennung des Druckverlusts in einem Reifen eines Rades |
| DE19959554.2 | 1999-12-10 | ||
| PCT/EP2000/005033 WO2000078566A1 (de) | 1999-06-19 | 2000-06-02 | Verfahren und vorrichtung zur erstellung einer korrekturwerttabelle, zur ermittlung einer prüfgrösse und zur erkennung des druckverlusts in einem reifen eines rades |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2003502213A JP2003502213A (ja) | 2003-01-21 |
| JP2003502213A5 JP2003502213A5 (ja) | 2007-07-12 |
| JP4660042B2 true JP4660042B2 (ja) | 2011-03-30 |
Family
ID=27219190
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001504750A Expired - Fee Related JP4660042B2 (ja) | 1999-06-19 | 2000-06-02 | 補正値テーブル作成、検査変数決定および車輪タイヤ圧力低下識別のための方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6817236B1 (ja) |
| EP (1) | EP1194304B1 (ja) |
| JP (1) | JP4660042B2 (ja) |
| DE (1) | DE50013236D1 (ja) |
| WO (1) | WO2000078566A1 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4744873B2 (ja) * | 2002-05-03 | 2011-08-10 | コンティネンタル・テーベス・アクチエンゲゼルシヤフト・ウント・コンパニー・オッフェネ・ハンデルスゲゼルシヤフト | 車輪回転数情報に基づいて直進走行を検出するための方法 |
| DE102005031485A1 (de) * | 2004-07-09 | 2006-02-23 | Continental Teves Ag & Co. Ohg | Verfahren zur Erkennung eines Druckverlusts in Kraftfahrzeugreifen |
| US8121758B2 (en) * | 2005-11-09 | 2012-02-21 | Ford Global Technologies | System for determining torque and tire forces using integrated sensing system |
| JP4796470B2 (ja) * | 2005-12-16 | 2011-10-19 | 住友ゴム工業株式会社 | タイヤ空気圧異常検出装置、方法およびプログラム |
| DE102006020490A1 (de) * | 2006-02-24 | 2007-08-30 | Volkswagen Ag | Verfahren und Vorrichtung zur Umfangsermittlung von Fahrzeugrädern |
| FR2927019B1 (fr) * | 2008-01-31 | 2010-02-19 | Renault Sas | Procede et systeme de diagnostic de l'etat de gonflage d'au moins un pneumatique d'un vehicule automobile |
| KR101339738B1 (ko) | 2011-12-26 | 2013-12-11 | 자동차부품연구원 | 타이어 감응형 차선유지지원장치 및 그 제어방법 |
| DE102013004900A1 (de) | 2013-03-21 | 2014-09-25 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Bestimmen eines aktuellen Umfangs eines Rades eines Kraftfahrzeugs, Fahrerassistenzeinrichtung und Kraftfahrzeug |
| SE541908C2 (en) * | 2018-05-31 | 2020-01-07 | Scania Cv Ab | Method, Control Unit, Computer Program Product and Carrier for Identifying Low Tire Pressure in a Vehicle |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04262907A (ja) * | 1990-12-06 | 1992-09-18 | Sumitomo Rubber Ind Ltd | タイヤデフレーションの検出方法 |
| JPH0692118A (ja) * | 1992-09-16 | 1994-04-05 | Sumitomo Electric Ind Ltd | タイヤ空気圧低下検出装置 |
| JPH06227226A (ja) * | 1992-08-29 | 1994-08-16 | Robert Bosch Gmbh | 自動車の車輪回転数信号の評価方法およびその装置 |
| JPH0796722A (ja) * | 1993-09-30 | 1995-04-11 | Honda Motor Co Ltd | タイヤ空気圧判定装置 |
| JPH07137513A (ja) * | 1993-11-19 | 1995-05-30 | Mazda Motor Corp | タイヤ空気圧判定装置 |
| JPH07164842A (ja) * | 1993-12-14 | 1995-06-27 | Sumitomo Electric Ind Ltd | タイヤ空気圧低下検出装置 |
| JPH08145654A (ja) * | 1994-11-21 | 1996-06-07 | Sumitomo Electric Ind Ltd | 旋回半径計算方法および旋回半径計算装置 |
| JPH08164720A (ja) * | 1994-12-15 | 1996-06-25 | Sumitomo Electric Ind Ltd | タイヤ空気圧低下検出方法およびタイヤ空気圧低下検出装置 |
| JPH09504761A (ja) * | 1993-11-03 | 1997-05-13 | イーテーテー・アウトモティーフェ・オイローペ・ゲゼルシャフト・ミト・ベシュンクテル・ハフツング | タイヤ空気圧監視方法および回路装置 |
| JPH10193932A (ja) * | 1997-01-07 | 1998-07-28 | Toyota Motor Corp | タイヤ空気圧異常判定装置 |
| JPH10297228A (ja) * | 1997-04-25 | 1998-11-10 | Yokohama Rubber Co Ltd:The | タイヤ空気圧警報装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04283665A (ja) * | 1991-03-12 | 1992-10-08 | Sumitomo Electric Ind Ltd | 車輪速度補正装置 |
| DE4410941A1 (de) | 1993-03-29 | 1994-10-06 | Mazda Motor | Reifenluftdruckwarnvorrichtung |
| DE4426734A1 (de) | 1993-08-20 | 1995-02-23 | Volkswagen Ag | Verfahren zum Erzeugen eines Reifendruck-Warnsignals |
| US5900543A (en) * | 1996-04-15 | 1999-05-04 | Sumitomo Rubber Industries, Ltd | Method for detecting decrease of tire air pressure and apparatus used therefor |
| DE19721480A1 (de) | 1997-05-23 | 1998-11-26 | Itt Mfg Enterprises Inc | Verfahren zur Erkennung von Druckverlusten im Fahrzeugreifen |
-
2000
- 2000-06-02 WO PCT/EP2000/005033 patent/WO2000078566A1/de active IP Right Grant
- 2000-06-02 US US10/019,210 patent/US6817236B1/en not_active Expired - Fee Related
- 2000-06-02 DE DE50013236T patent/DE50013236D1/de not_active Expired - Lifetime
- 2000-06-02 EP EP00936851A patent/EP1194304B1/de not_active Expired - Lifetime
- 2000-06-02 JP JP2001504750A patent/JP4660042B2/ja not_active Expired - Fee Related
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04262907A (ja) * | 1990-12-06 | 1992-09-18 | Sumitomo Rubber Ind Ltd | タイヤデフレーションの検出方法 |
| JPH06227226A (ja) * | 1992-08-29 | 1994-08-16 | Robert Bosch Gmbh | 自動車の車輪回転数信号の評価方法およびその装置 |
| JPH0692118A (ja) * | 1992-09-16 | 1994-04-05 | Sumitomo Electric Ind Ltd | タイヤ空気圧低下検出装置 |
| JPH0796722A (ja) * | 1993-09-30 | 1995-04-11 | Honda Motor Co Ltd | タイヤ空気圧判定装置 |
| JPH09504761A (ja) * | 1993-11-03 | 1997-05-13 | イーテーテー・アウトモティーフェ・オイローペ・ゲゼルシャフト・ミト・ベシュンクテル・ハフツング | タイヤ空気圧監視方法および回路装置 |
| JPH07137513A (ja) * | 1993-11-19 | 1995-05-30 | Mazda Motor Corp | タイヤ空気圧判定装置 |
| JPH07164842A (ja) * | 1993-12-14 | 1995-06-27 | Sumitomo Electric Ind Ltd | タイヤ空気圧低下検出装置 |
| JPH08145654A (ja) * | 1994-11-21 | 1996-06-07 | Sumitomo Electric Ind Ltd | 旋回半径計算方法および旋回半径計算装置 |
| JPH08164720A (ja) * | 1994-12-15 | 1996-06-25 | Sumitomo Electric Ind Ltd | タイヤ空気圧低下検出方法およびタイヤ空気圧低下検出装置 |
| JPH10193932A (ja) * | 1997-01-07 | 1998-07-28 | Toyota Motor Corp | タイヤ空気圧異常判定装置 |
| JPH10297228A (ja) * | 1997-04-25 | 1998-11-10 | Yokohama Rubber Co Ltd:The | タイヤ空気圧警報装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003502213A (ja) | 2003-01-21 |
| EP1194304A1 (de) | 2002-04-10 |
| WO2000078566A1 (de) | 2000-12-28 |
| EP1194304B1 (de) | 2006-07-26 |
| US6817236B1 (en) | 2004-11-16 |
| DE50013236D1 (de) | 2006-09-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101797939B1 (ko) | 타이어 분류 | |
| US5828975A (en) | Method and device for calculating turning radius of vehicle taking load movement thereof into consideration | |
| US5578984A (en) | Tire air pressure reduction detecting method and apparatus | |
| US11472236B2 (en) | Method, control device, and system for determining a profile depth of a profile of a tire | |
| JP4709804B2 (ja) | 車輪径のばらつき検出装置 | |
| US6092415A (en) | Method and device for monitoring the tire air pressure of the wheels of an automobile | |
| JP3231256B2 (ja) | 初期補正係数演算装置 | |
| KR20120109984A (ko) | 차량 질량 추정 장치, 방법 및 프로그램을 기록한 컴퓨터 판독 가능한 기록 매체와, 타이어 공기압 저하 검출 장치, 방법 및 프로그램을 기록한 판독 가능한 기록 매체 | |
| JPH0726967B2 (ja) | 走行車車輪の車輪センサによって求められた回転速度を補正する方法 | |
| US20100318308A1 (en) | Calibration in indirect tire pressure monitoring | |
| US20030144777A1 (en) | System and method for monitoring the vehicle dynamics of a motor vehicle | |
| US20030144767A1 (en) | System and method for determining the load state of a motor vehicle | |
| US20100211250A1 (en) | Method for indirect tire pressure monitoring and tire pressure monitoring system | |
| JP4660042B2 (ja) | 補正値テーブル作成、検査変数決定および車輪タイヤ圧力低下識別のための方法 | |
| JPH09249010A (ja) | 初期補正係数演算装置およびこれを利用した装置 | |
| JP2005521579A (ja) | 車両タイヤ状態のモニタ方法および装置 | |
| JPH10100621A (ja) | タイヤ空気圧低下検出方法および装置 | |
| JP4101909B2 (ja) | 動力車両において誤り信号を発生するための方法及び装置 | |
| EP0844112A1 (en) | A method and apparatus for detecting the presence of an at least partially deflated tyre on a motor vehicle | |
| JP4960570B2 (ja) | 自動車の右輪及び左輪の自動位置確認のための方法 | |
| US6822561B2 (en) | Method and device for detecting a drop in pressure in motor vehicle tires | |
| JP4304079B2 (ja) | 全輪駆動装置を備えた車両の山道走行を決定する方法 | |
| US6826462B2 (en) | System for detecting a drop in tire pressure | |
| US8180523B2 (en) | Method for recognition of a pressure loss in motor vehicle tires | |
| JP2003220811A (ja) | タイヤ空気圧低下検出方法および装置、ならびにタイヤ減圧判定のプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070412 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070412 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070413 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090929 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091216 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20100519 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100601 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100929 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20101012 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101130 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101228 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140107 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |