JP4649938B2 - ブレ補正装置、レンズ鏡筒、カメラシステム - Google Patents
ブレ補正装置、レンズ鏡筒、カメラシステム Download PDFInfo
- Publication number
- JP4649938B2 JP4649938B2 JP2004298848A JP2004298848A JP4649938B2 JP 4649938 B2 JP4649938 B2 JP 4649938B2 JP 2004298848 A JP2004298848 A JP 2004298848A JP 2004298848 A JP2004298848 A JP 2004298848A JP 4649938 B2 JP4649938 B2 JP 4649938B2
- Authority
- JP
- Japan
- Prior art keywords
- blur correction
- gravity
- optical member
- lens
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Adjustment Of Camera Lenses (AREA)
- Studio Devices (AREA)
Description
ブレ補正装置は、ブレ補正レンズを所定範囲内で保持するためのロック機構(電磁ロック機構等)を備えている。ロック機構は、ブレ補正の開始時には、ロックの解除動作を行い、さらに、ブレ補正の終了時には、ロックの開始動作を行う。
ロック時に発生する像飛びを防止する方法としては、例えば、ロック時に、光学装置の姿勢に対して重力方向を検出して、ブレ補正レンズを重力方向にゆっくりと下降させる方法が知られている。
ブレ補正レンズが複数(例えば、4つ)の弾性部材(バネ等)によって支持されている構造のブレ補正装置では、複数のバネの弾性力が互いに異なると、ブレ補正レンズの重量を考慮しない場合でのバネのつりあいの位置(バネの中立位置)と、ブレ補正レンズの近傍に配置された各種部材とブレ補正レンズとが接触しない位置(ロックのためのセンタリング位置:以下、概中央位置という)とが一致しない状況がある。
請求項2の発明は、像ブレを補正するブレ補正光学部材(102)と、前記ブレ補正光学部材(102)を、所定の可動範囲内(−A〜A,−B〜B)を移動するように支持する弾性部材(102a,102b)と、前記ブレ補正光学部材(102)を駆動する駆動部(103)と、前記駆動部(103)の動作を、機械的に係止するロック部(120a,120b)と、重力方向を検出するための重力方向検出部(101a)と、前記弾性部材(102a,102b)から受ける弾性力が前記重力方向に略直交する第1方向で均衡する均衡位置を算出する均衡位置演算部(105)と、前記ロック部(120a,120b)による係止時に、前記均衡位置のうち前記係止時での可動範囲(−a〜a,−b〜b)の境界に接する位置であって、前記重力方向に沿った安定位置((Xs,−b),(a,Ys''))まで、前記ブレ補正光学部材(102)を駆動するように、前記駆動部(103)の動作を制御する駆動制御部(109)とを備えたこと、こと、を特徴とするブレ補正装置である。
請求項6の発明は、請求項1から請求項5までのいずれか1項に記載のブレ補正装置を備えたこと、を特徴とするレンズ鏡筒である。
請求項7の発明は、請求項1から請求項5までのいずれか1項に記載のブレ補正装置を備えたこと、を特徴とするカメラシステムである。
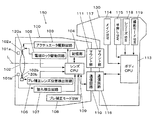
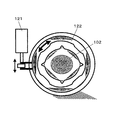
また、図1(a)では、一方向のブレ補正装置150について説明するが、他方向のブレ補正装置に関しても同様である。ここでは、ブレ補正装置150を中心に、カメラシステム(例えば、一眼レフカメラ)の概要を説明するが、カメラシステムは、ブレ補正装置150を備えた光学装置の一例として示したものである。
メインSW114は、カメラボディ130側の電源ON又はOFFの操作を行う。マウント部117は、レンズ鏡筒100とカメラボディ130とを連結するためのカメラマウントである。また、レンズ鏡筒100の電源は、カメラボディ130から供給される。
角速度センサ101bは、例えば、振れを検出する振動ジャイロ型のセンサである。なお、角速度センサ101bについては、振れを検出できるセンサであれば、適宜のセンサ(例えば、加速度センサ)であってもよい。
である。記憶部104は、例えば、ブレ補正に関する各種調整値と、バネ部材102a,102bの中立位置(ブレ補正レンズ102の重量を考慮しない場合でのバネのつりあいの位置)等とを記憶する。ブレ補正モードSW108は、ブレ補正のモードを切替えるためのブレ補正モードセレクタである。
ロック機構は、例えば、電磁ロックアクチュエータ121及び駆動範囲制限部材122を備え、ロック時に、電磁ロック駆動回路102及びアクチュエータ駆動回路103を介して、レンズCPU109により制御される。
図2は、重力方向がY軸と略平行である場合でのブレ補正装置150の動作を示すタイミングチャートである。
図3は、重力方向がY軸と略平行である場合でのブレ補正レンズ102の位置を示す図である。
ここで、バネ部材102a,102bにより支持されたブレ補正レンズ102の可動範囲は、例えば、ブレ補正可能領域と、ロック時の領域とにそれぞれ区分される。ブレ補正可能領域は、図示のように、X座標(−A〜A),Y座標(−B〜B)に囲まれた領域である。同じく、ロック時の領域は、図示のように、X座標(−a〜a),Y座標(−b〜b)に囲まれた領域である。また、重力方向検出部101aにより検出された重力方向を、−Y方向とする。
図4は、重力方向がY軸に対して傾いている場合でのブレ補正装置150の動作を示すタイミングチャートである。
図5は、重力方向がY軸に対して傾いている場合でのブレ補正レンズ102の位置を示す図である。
ここでは、上述した重力方向(−Y方向)に対して、反時計回りにθだけずれた方向が重力方向(直線l2の傾き)である点が異なる。
電磁ロック駆動回路105は、タイミングT102〜T103の間に、ブレ補正レンズ102を概中央位置(Xc,Yc)で電磁ロックする。
移動位置(Xs’,Ys’)は、以下の数式で算出される。

安定位置のY座標であるYs’’は、以下の数式で算出される。
以上説明した実施例に限定されることなく、種々の変形や変更が可能であって、それらも本発明の均等の範囲である。
(1)上述した実施例では、ブレ補正レンズ102を、略中央位置(Xc,Yc)から安定位置(Xs,−b)又は(a,Ys’’)まで駆動するときに、移動位置(Xs,Yc)、又は、(Xs’,Ys’)及び中立位置(Xs,Ys)を経由していたが、ブレ補正レンズ102を、安定位置(Xs,−b)又は(a,Ys’’)に直接駆動するようにしてもよい。
具体的には、レンズCPU109は、重力方向及び均衡位置に基づいて安定位置を予め算出して、記憶部104に記憶した後、ロック時に、アクチュエータ駆動回路103を制御して、ブレ補正レンズ102を略中央位置から安定位置に直接駆動するようにすればよい。
(3)上述した実施例では、重力方向として、−Y方向と、直線l2の傾きとについて説明したが、これら以外の重力方向であっても、レンズCPU109は、均衡位置のうちロック時の可動範囲の境界に接する安定位置を算出して、ブレ補正レンズ102を重力方向に沿って、安定位置までゆっくり駆動することができる。
(4)上述した実施例では、重力方向検出部101aを用いて重力方向を検出したが、これに限られず、ブレ補正レンズ102を駆動するのに要する力から重力方向を求めてもよい。
(5)上述した実施例では、移動位置(Xs’,Ys’)は、式1、式2で算出する例で説明したが、以下の数式で算出するようにしてもよい。
Xs’=(αβXc−Yc+βXs−Xc)/(α+β)
Ys’=(−αβXc+βYc+αβYs+αYs)/(α+β)
但し、α=(Ys−Yc)/(Xs−Xc)
β=−(Xs−Xc)/(Ys−Yc)
このとき、上述した式3に対応する安定位置のY座標であるYs’’は、以下の数式で算出される。
Ys’’=Ys+{αβ(Xc−Ys)(a−Xs)}/{Xc+Yc−α(Xc−Xs)}
101a 重力方向検出部
101b 角速度センサ
102 ブレ補正レンズ
102a,102b バネ部材
103 アクチュエータ駆動回路
104 記憶部
105 電磁ロック駆動回路
106 ブレ補正レンズ位置検出回路
107 振れ検出回路
108 ブレ補正モードSW
109 レンズCPU
113 ボディCPU
120a,120b 駆動ユニット
121 電磁ロックアクチュエータ
122 駆動範囲制限部材
130 カメラボディ
150 ブレ補正装置
Claims (7)
- 像ブレを補正するブレ補正光学部材と、
前記ブレ補正光学部材を、所定の可動範囲内を移動するように支持する弾性部材と、
前記ブレ補正光学部材を駆動する駆動部と、
前記駆動部の動作を、機械的に係止するロック部と、
重力方向を検出するための重力方向検出部と、
前記弾性部材から受ける弾性力が前記重力方向に略直交する第1方向で均衡する均衡位置を記憶する記憶部と、
前記ロック部による係止時に、前記均衡位置のうち前記係止時での可動範囲の境界に接する位置であって、前記重力方向に沿った安定位置まで、前記ブレ補正光学部材を駆動するように、前記駆動部の動作を制御する駆動制御部とを備えたこと、
を特徴とするブレ補正装置。 - 像ブレを補正するブレ補正光学部材と、
前記ブレ補正光学部材を、所定の可動範囲内を移動するように支持する弾性部材と、
前記ブレ補正光学部材を駆動する駆動部と、
前記駆動部の動作を、機械的に係止するロック部と、
重力方向を検出するための重力方向検出部と、
前記弾性部材から受ける弾性力が前記重力方向に略直交する第1方向で均衡する均衡位置を算出する均衡位置演算部と、
前記ロック部による係止時に、前記均衡位置のうち前記係止時での可動範囲の境界に接する位置であって、前記重力方向に沿った安定位置まで、前記ブレ補正光学部材を駆動するように、前記駆動部の動作を制御する駆動制御部とを備えたこと、
を特徴とするブレ補正装置。 - 請求項1に記載のブレ補正装置において、
前記記憶部は、
前記ブレ補正光学部材の前記弾性部材から受ける弾性力が前記第1方向及び前記重力方向で均衡する中立位置を記憶し、
前記駆動制御部は、
前記ブレ補正光学部材を前記重力方向に駆動するときに、前記中立位置を経由するように、前記駆動部の動作を制御すること、
を特徴とするブレ補正装置。 - 請求項1から請求項3までのいずれか1項に記載のブレ補正装置において、
前記駆動制御部は、
前記ブレ補正光学部材の前記弾性部材から受ける弾性力が前記第1方向及び前記重力方向で均衡する中立位置を演算し、
前記ブレ補正光学部材を前記重力方向に駆動するときに、前記中立位置を経由するように、前記駆動部の動作を制御すること、
を特徴とするブレ補正装置。 - 請求項1から請求項4までのいずれか1項に記載のブレ補正装置において、
前記駆動制御部は、
前記ロック部による係止時であって、前記ブレ補正光学部材を前記安定位置まで駆動するときに、前記ブレ補正光学部材を、前記第1方向に沿って前記均衡位置まで駆動した後、前記重力方向に駆動するように、前記駆動部の動作を制御すること、
を特徴とするブレ補正装置。 - 請求項1から請求項5までのいずれか1項に記載のブレ補正装置を備えたこと、
を特徴とするレンズ鏡筒。 - 請求項1から請求項5までのいずれか1項に記載のブレ補正装置を備えたこと、
を特徴とするカメラシステム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004298848A JP4649938B2 (ja) | 2003-10-15 | 2004-10-13 | ブレ補正装置、レンズ鏡筒、カメラシステム |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003354480 | 2003-10-15 | ||
| JP2004298848A JP4649938B2 (ja) | 2003-10-15 | 2004-10-13 | ブレ補正装置、レンズ鏡筒、カメラシステム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005202358A JP2005202358A (ja) | 2005-07-28 |
| JP2005202358A5 JP2005202358A5 (ja) | 2007-11-29 |
| JP4649938B2 true JP4649938B2 (ja) | 2011-03-16 |
Family
ID=34828853
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004298848A Expired - Fee Related JP4649938B2 (ja) | 2003-10-15 | 2004-10-13 | ブレ補正装置、レンズ鏡筒、カメラシステム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4649938B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9106833B2 (en) | 2012-09-14 | 2015-08-11 | Ricoh Imaging Company, Ltd. | Blur correction apparatus |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009015072A (ja) * | 2007-07-05 | 2009-01-22 | Nikon Corp | 付勢部材,光学部品及び光学装置 |
| JP2009015048A (ja) * | 2007-07-05 | 2009-01-22 | Nikon Corp | カメラ |
| JP5183135B2 (ja) | 2007-09-21 | 2013-04-17 | キヤノン株式会社 | 交換レンズおよび光学機器 |
| JP5590904B2 (ja) * | 2010-02-08 | 2014-09-17 | キヤノン株式会社 | 光学機器 |
| CN109478001B (zh) * | 2016-07-12 | 2022-02-01 | 深圳市大疆创新科技有限公司 | 用于平衡变焦镜头重心的系统 |
| JP7218789B2 (ja) * | 2018-10-16 | 2023-02-07 | 株式会社Jvcケンウッド | 調整方法、撮像装置および撮像装置の制御プログラム |
| JP7209111B2 (ja) * | 2019-11-19 | 2023-01-19 | 富士フイルム株式会社 | 光学装置、双眼鏡、光学装置の制御方法、及びプログラム |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH086095A (ja) * | 1994-06-17 | 1996-01-12 | Olympus Optical Co Ltd | カメラのぶれ補正装置 |
| JPH0961881A (ja) * | 1995-08-21 | 1997-03-07 | Canon Inc | レンズ鏡筒及びそれを用いた光学機器 |
| JPH0980559A (ja) * | 1995-09-14 | 1997-03-28 | Nikon Corp | 像振れ補正装置 |
| JP2001311975A (ja) * | 2000-04-28 | 2001-11-09 | Fuji Photo Optical Co Ltd | 像ブレ防止装置 |
| JP2003241247A (ja) * | 2002-02-19 | 2003-08-27 | Nikon Corp | 振れ補正光学系のロック装置 |
-
2004
- 2004-10-13 JP JP2004298848A patent/JP4649938B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH086095A (ja) * | 1994-06-17 | 1996-01-12 | Olympus Optical Co Ltd | カメラのぶれ補正装置 |
| JPH0961881A (ja) * | 1995-08-21 | 1997-03-07 | Canon Inc | レンズ鏡筒及びそれを用いた光学機器 |
| JPH0980559A (ja) * | 1995-09-14 | 1997-03-28 | Nikon Corp | 像振れ補正装置 |
| JP2001311975A (ja) * | 2000-04-28 | 2001-11-09 | Fuji Photo Optical Co Ltd | 像ブレ防止装置 |
| JP2003241247A (ja) * | 2002-02-19 | 2003-08-27 | Nikon Corp | 振れ補正光学系のロック装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9106833B2 (en) | 2012-09-14 | 2015-08-11 | Ricoh Imaging Company, Ltd. | Blur correction apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005202358A (ja) | 2005-07-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10432862B2 (en) | Imaging apparatus, image projector apparatus, and stage apparatus | |
| JP5109450B2 (ja) | ブレ補正装置及び光学機器 | |
| JP2018124582A (ja) | 手振れ補正装置及び手振れ補正回路並びに手振れ補正方法 | |
| US6384976B1 (en) | Image stabilizing apparatus | |
| JP5183135B2 (ja) | 交換レンズおよび光学機器 | |
| US20180184005A1 (en) | Camera controller, and a calibration method for a correction lens | |
| JPH03188430A (ja) | 像ぶれ防止装置 | |
| JP2007171234A (ja) | 手振れ補正装置,およびその方法 | |
| JP4649938B2 (ja) | ブレ補正装置、レンズ鏡筒、カメラシステム | |
| US5619293A (en) | Image blur suppression device of a camera which aligns an image blur suppression lens and actuator based on anticipated sag of supporting members | |
| JP4973219B2 (ja) | 光学機器 | |
| US9529209B2 (en) | Blur compensation device, lens barrel, and camera device | |
| JP2005173160A (ja) | 像振れ補正装置および光学機器 | |
| JP4843933B2 (ja) | 手振れ補正システムおよび撮影装置 | |
| JP3853158B2 (ja) | 撮像装置の像ぶれ補正方法および装置 | |
| JP2014228623A (ja) | ブレ補正装置、レンズ鏡筒および撮影装置 | |
| JP2003107554A (ja) | 防振用補正レンズの支持構造 | |
| JPH03237438A (ja) | カメラの像安定化装置 | |
| JP2005202358A5 (ja) | ||
| JP2007121501A (ja) | カメラ | |
| JP2003233098A (ja) | ブレ補正装置 | |
| EP1083455B1 (en) | Image stabilizing apparatus | |
| JP2014228621A (ja) | ブレ補正装置および撮影装置 | |
| JP2011221090A (ja) | カメラシステム | |
| JP2009175241A (ja) | 光学装置およびその調整方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071003 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071005 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100824 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101025 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101116 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101129 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4649938 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131224 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131224 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |