JP4635602B2 - 車両用操舵制御装置 - Google Patents
車両用操舵制御装置 Download PDFInfo
- Publication number
- JP4635602B2 JP4635602B2 JP2004374676A JP2004374676A JP4635602B2 JP 4635602 B2 JP4635602 B2 JP 4635602B2 JP 2004374676 A JP2004374676 A JP 2004374676A JP 2004374676 A JP2004374676 A JP 2004374676A JP 4635602 B2 JP4635602 B2 JP 4635602B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- vehicle
- control device
- reaction force
- change
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Landscapes
- Power Steering Mechanism (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Description
操向輪に転舵トルクを付加する転舵手段、およびハンドルに操舵力を付加する操舵反力手段の少なくともいずれか一方を駆動制御する操舵制御手段と、
車両の動力源が停止するか否かを判定する動力停止判定手段と、
路面から車両のタイヤへの入力を検出するタイヤ入力検出手段と、
車両の動力停止が判定され、かつタイヤ入力が変化しない状態が所定時間継続したとき、前記操舵制御手段を停止させる操舵制御停止手段と、
を備えることを特徴とする。
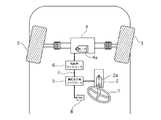
図1は実施例1のステア・バイ・ワイヤ(SBW)システムの構成を示す図である。
実施例1に示すSBWシステムは、ハンドル1および操舵反力用アクチュエータ(操舵反力手段)2と、操向タイヤ3および転舵用アクチュエータ(転舵手段)4との間に機械的なつながりが無い。
[操舵制御処理]
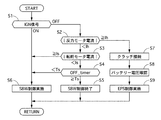
図2は、実施例1の操舵反力用コントローラ5および転舵用コントローラ6で実行される操舵制御処理の流れを示すフローチャートで、以下、各ステップについて説明する。この処理は、所定の制御周期(例えば5msec)で実行される。
車両制御システムのネットワーク化が進展している今日においては、車速センサにより検出された車速信号を、ステア・バイ・ワイヤ(SBW)システムが車速センサから直接受け取る構成を採るとは限らず、車内ネットワークを経由して他の制御システムから車速情報を取得している場合がある。このような構成を採る操舵制御装置では、例えば、運転者等によりイグニッションスイッチがオンからオフに切り替えられた場合には、一般にはエンジンが停止、つまり車両が駐停車していることを前提に車両制御システムが構成されているため、イグニッションスイッチのオフ後は、車速情報を生成する他のシステム(例えば、ABSシステム)を含めてシステム全体に供給される駆動電力が切断される構成が、一般的に採用されている。
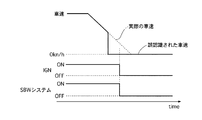
(a)図4に示すように、走行中に車速をゼロと誤認識した場合、イグニッションスイッチがオフされると、ABSシステムへの電力供給が停止するため、SBWシステムは車速情報が得られなくなる。
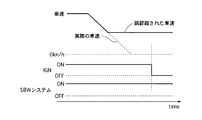
(b)図5に示すように、駐車時に車速をゼロ以外と誤認識した場合、イグニッションスイッチをオフしたにもかかわらず、SBWシステムが終了せず、バッテリー電源が消費される。
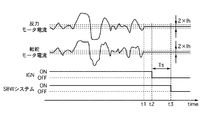
これに対し、実施例1のSBWシステムでは、イグニッションスイッチ8がオフされ、運転者がハンドル1から手を放し、かつ路面からの入力が発生していない状態が所定時間Ts以上継続したとき、車両停止と判断し、SBWシステムを終了する。
実施例1では、タイヤ入力変化を、ラック軸力変化から検出している。走行中は直進時でも操向タイヤ3を介して路面からの力を受けるため、所定値以上の軸力が生じている場合には、走行中であると判断できる。
実施例1では、運転者がハンドル1から手を放しているか否かを、運転者の操舵トルクから検出している。運転者がハンドル1を握っている状態では、常にハンドル1に操舵トルクが生じているため、このトルクが生じている間は、SBWシステムを終了しない。これにより、仮にエンジンが停止している場合であっても、SBW制御だけでなく、ステアリングアシスト制御(EPS制御)などの継続が可能となり、エンジン停止後の据え切りにも対応可能となる。
実施例1の車両用操舵制御装置にあっては、以下に列挙する効果が得られる。
図7は、実施例2のステア・バイ・ワイヤ(SBW)システムの構成を示す図であり、実施例1の構成に対し、ハンドル1と操向タイヤ3との間に、メカバックアップ機構9を設け、エンジン停止後にパワーアシスト制御を実施する点で異なる。
[操舵制御処理]
図8は、実施例2の操舵反力用コントローラ5および転舵用コントローラ6で実行される操舵制御処理の流れを示すフローチャートで、以下、各ステップについて説明する。この処理は、所定の制御周期(例えば5msec)で実行される。なお、ステップS1,ステップS3〜ステップS6については、図2のステップS1,ステップS3〜ステップS6と同一の処理を行うステップであるため、説明を省略する。
運転者がイグニッションスイッチ8をオフした後に操舵するような場合、実施例1では、SBW制御を継続する例を示したが、実施例2では、メカバックアップ機構9を作動させてハンドル1と操向タイヤ3とを機械的に連結することで、パワーアシスト制御を実施することが可能となる。
実施例2の車両用操舵制御装置にあっては、実施例1の効果(1)〜(6)に加え、以下に列挙する効果が得られる。
以上、本発明を実施するための最良の形態を、実施例1,2に基づいて説明したが、本発明の具体的な構成は、実施例1,2に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても本発明に含まれる。
2 操舵反力用アクチュエータ
3 操向タイヤ
4 転舵用アクチュエータ
5 操舵反力用コントローラ
6 転舵用コントローラ
7 通信ライン
8 イグニッションスイッチ
9 メカバックアップ機構
10 クラッチ
Claims (7)
- 操向輪に転舵トルクを付加する転舵手段、およびハンドルに操舵力を付加する操舵反力手段の少なくともいずれか一方を駆動制御する操舵制御手段と、
車両の動力源が停止するか否かを判定する動力停止判定手段と、
路面から車両のタイヤへの入力を検出するタイヤ入力検出手段と、
車両の動力停止が判定され、かつタイヤ入力が変化しない状態が所定時間継続したとき、前記操舵制御手段を停止させる操舵制御停止手段と、
を備えることを特徴とする車両用操舵制御装置。 - 請求項1に記載の車両用操舵制御装置において、
運転者がハンドルから手を放しているか否かを検出する手放し検出手段を備え、
前記操舵制御停止手段は、前記手放し状態が前記所定時間以上継続したとき、操舵制御を停止させることを特徴とする車両用操舵制御装置。 - 請求項2に記載の車両用操舵制御装置において、
前記ハンドルに入力される操舵トルクを検出する操舵トルク検出手段を備え、
前記手放し検出手段は、前記操舵トルクが変化しない状態が前記所定時間継続したとき、手放し状態である判定することを特徴とする車両用操舵制御装置。 - 請求項3に記載の車両用操舵制御装置において、
前記操舵反力手段は、操舵反力モータを有し、
前記手放し検出手段は、前記操舵反力モータに流れる電流変化に基づいて前記操舵トルク変化を検出することを特徴とする車両用操舵制御装置。 - 請求項1ないし請求項4のいずれか1項に記載の車両用操舵装置において、
前記タイヤ入力検出手段は、ラック軸力変化から前記タイヤ入力変化を検出することを特徴とする車両用操舵制御装置。 - 請求項5に記載の車両用操舵制御装置において、
前記転舵手段は、転舵モータを有し、
前記タイヤ入力検出手段は、前記転舵モータに流れる電流変化に基づいて前記ラック軸力の変化を検出することを特徴とする車両用操舵制御装置。 - 請求項6に記載の車両用操舵制御装置において、
前記ハンドルと前記操向輪とは、機械的に切り離され、
前記ハンドルと前記操向輪とを機械的に連結するバックアップ機構を備え、
前記車両の動力停止が判定されたとき、前記バックアップ機構を連結し、前記転舵モータを用い、運転者の操舵トルクに操舵付加トルクを与えるパワーアシスト制御を行うパワーアシスト制御手段と、
を備えることを特徴とする車両用操舵制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004374676A JP4635602B2 (ja) | 2004-12-24 | 2004-12-24 | 車両用操舵制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004374676A JP4635602B2 (ja) | 2004-12-24 | 2004-12-24 | 車両用操舵制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006182055A JP2006182055A (ja) | 2006-07-13 |
| JP4635602B2 true JP4635602B2 (ja) | 2011-02-23 |
Family
ID=36735491
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004374676A Expired - Fee Related JP4635602B2 (ja) | 2004-12-24 | 2004-12-24 | 車両用操舵制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4635602B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012101705A (ja) * | 2010-11-11 | 2012-05-31 | Tokai Rika Co Ltd | 車載通信機 |
| JP6013171B2 (ja) * | 2012-12-17 | 2016-10-25 | 株式会社ショーワ | 操舵装置、操舵装置用の切替え装置およびプログラム |
| US9573617B2 (en) | 2013-01-11 | 2017-02-21 | Nissan Motor Co., Ltd. | Steering control device and steering control method |
| US9688301B2 (en) | 2013-01-11 | 2017-06-27 | Nissan Motor Co., Ltd. | Steering control device and steering control method |
| CN103587576B (zh) * | 2013-12-06 | 2015-09-02 | 中国石油大学(华东) | 一种电动汽车线控转向系统及控制方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH061901Y2 (ja) * | 1987-06-17 | 1994-01-19 | 日本精工株式会社 | 電動式動力舵取装置 |
| JP3381539B2 (ja) * | 1997-02-07 | 2003-03-04 | 日産自動車株式会社 | 電動式パワーステアリングの制御装置 |
| JP2998929B2 (ja) * | 1997-08-18 | 2000-01-17 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP3345804B2 (ja) * | 1998-10-23 | 2002-11-18 | 光洋精工株式会社 | 車両用操舵装置 |
| JP3525414B2 (ja) * | 2000-06-06 | 2004-05-10 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP2002037111A (ja) * | 2000-07-25 | 2002-02-06 | Koyo Seiko Co Ltd | 車両用操舵装置 |
| JP4586258B2 (ja) * | 2000-11-02 | 2010-11-24 | 日産自動車株式会社 | 車両の操舵制御装置 |
| JP3972643B2 (ja) * | 2001-12-11 | 2007-09-05 | 日産自動車株式会社 | 電動パワーステアリング制御装置 |
| JP4039175B2 (ja) * | 2002-08-15 | 2008-01-30 | 日産自動車株式会社 | 車両用操舵装置 |
| JP2004161140A (ja) * | 2002-11-13 | 2004-06-10 | Koyo Seiko Co Ltd | 電動パワーステアリング装置 |
-
2004
- 2004-12-24 JP JP2004374676A patent/JP4635602B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006182055A (ja) | 2006-07-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5804198B2 (ja) | 車両の操舵制御装置及び操舵制御方法 | |
| JP4853053B2 (ja) | 車両用操舵制御装置 | |
| US12005975B2 (en) | Method for providing steering assistance for an electromechanical steering system of a motor vehicle comprising a redundantly designed control device | |
| JP6533772B2 (ja) | 操舵装置 | |
| JP5406377B2 (ja) | 制御システム、及び電動パワーステアリング制御装置 | |
| US10246121B2 (en) | Vehicle steering device | |
| CN105358408A (zh) | 用于车辆的转向系统 | |
| JP5206845B2 (ja) | 車両用操舵制御装置 | |
| JP4839793B2 (ja) | 車両用操舵制御装置 | |
| US20090055050A1 (en) | Steering apparatus for vehicle | |
| CN110641547A (zh) | 车辆用转向系统 | |
| US11807317B2 (en) | Method for operating a vehicle | |
| JP2005096745A (ja) | 車両用操舵装置 | |
| WO2008059731A1 (fr) | Dispositif de direction de véhicule | |
| JP5239245B2 (ja) | 車両用操舵制御装置 | |
| JP4635602B2 (ja) | 車両用操舵制御装置 | |
| JP5076564B2 (ja) | 駆動制御装置およびそれを用いた操舵制御装置 | |
| JP3531560B2 (ja) | 車両の電動パワーステアリング装置 | |
| JP5332213B2 (ja) | ステアバイワイヤシステムの診断装置およびステアバイワイヤシステムの診断方法 | |
| JP2013079003A (ja) | 車両用操舵装置 | |
| JP5050402B2 (ja) | 車両用操舵制御装置 | |
| JP4243146B2 (ja) | 電動ステアリング装置におけるバッテリ状態判定装置 | |
| JP4534845B2 (ja) | 操舵制御装置 | |
| JP2006248304A (ja) | 車両用操舵装置 | |
| JPH0696389B2 (ja) | 電動式パワ−ステアリング制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071128 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091217 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100713 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100805 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101026 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101108 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131203 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4635602 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |