JP4594485B2 - 走査光学系 - Google Patents
走査光学系 Download PDFInfo
- Publication number
- JP4594485B2 JP4594485B2 JP2000090490A JP2000090490A JP4594485B2 JP 4594485 B2 JP4594485 B2 JP 4594485B2 JP 2000090490 A JP2000090490 A JP 2000090490A JP 2000090490 A JP2000090490 A JP 2000090490A JP 4594485 B2 JP4594485 B2 JP 4594485B2
- Authority
- JP
- Japan
- Prior art keywords
- optical system
- light
- scanning
- scanned
- scanning optical
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Landscapes
- Mechanical Optical Scanning Systems (AREA)
- Lenses (AREA)
- Facsimile Scanning Arrangements (AREA)
Description
【発明の属する技術分野】
本発明は、走査光学系に関し、特に、光源から発せられた光を光偏向手段によって偏向して被照射面を2次元走査する走査光学系に関するものである。
【0002】
【従来の技術】
従来の走査光学系の例として図10、図11に示したようなものがある。図10の場合(特開平8−327926号)、この走査光学系は、まず、コリメータレンズ52、スリット53、シリンドリカルレンズ54で構成される集光光学系により、光源51の光をコリメートし、回転多面鏡55に導く。回転多面鏡55で反射偏向された光を、レンズ2枚で構成される結像レンズ56により結像面57を1次元走査する。
【0003】
図11の場合(特開平8−146320号)は、光源61の光をコリメータレンズ62で平行にし、偏向手段63で反射偏向した後、結像手段64で被照射面65を2次元走査している。
【0004】
【発明が解決しようとする課題】
しかしながら、図10の場合は、光学系を構成する光学素子の数が多いので、必要な光学性能を得るための組み立て調整の精度が厳しくなり、コストも増加する。また、図11の場合は、光学系の具体的な構成が開示されていない。
【0005】
本発明はこのような従来技術の問題点を解決するためになされたものであり、その目的は、少ない光学素子によって構成された小型な走査光学系を提供することである。
【0006】
【課題を解決するための手段】
上記目的を達成する本発明の第1の走査光学系は、光源からの光を偏向して被走査面上で走査する光偏向手段と、前記光偏向手段により偏向された光を被走査面に結像する結像光学系とからなる走査光学系において、
前記結像光学系が光学部材を含み、前記光学部材の光学パワーを有する面の中最も被走査面側の面が透過作用の単独作用面で、
前記光学部材が光学パワーを有し軸上主光線に対して偏心した非回転対称面を少なくとも1面含む2面以上の反射面を含むことを特徴とするものである。
【0007】
この走査光学系は、後記の実施例1〜6が対応する。
【0008】
この走査光学系の作用効果を説明する。光学パワーを有し軸上主光線に対して偏心した非回転対称面を少なくとも1面含む2面以上の反射面で反射することで、折り畳みの効果により光学系を小型化することができる。光学パワーを有する反射面は、レンズ作用と偏向作用を持つので、小型化の効果が大きい。
【0009】
光学パワーを有し軸上主光線に対して偏心した反射面を使用した光学系では、光学パワーを有し偏心した反射面に対して光線が斜めに入射するために、軸上光線でも偏心によるコマ収差、非点収差等が発生する。この反射面を回転非対称面とすることで、この偏心収差を補正することができる。
【0010】
また、一般に、走査光学系において光偏向手段によって偏向された光を偏心した反射面に入射させる場合、直線走査性が確保できないという問題が生ずるが、結像光学系の反射面を回転非対称な反射面とすることで直線走査性を確保することができる。
【0011】
また、回転非対称面を使うことで、結像光学系を2次元fアークサインθレンズや2次元fθレンズにし、被走査面を等速走査するのが容易になる。
【0012】
回転多面鏡(ポリゴンミラー)等のように偏向角がリニアに変化する光偏向手段を使う場合は、結像光学系でマイナスのディストーションを発生させ結像光学系をfθレンズとすることで、被走査面を等速走査することができる。また、ガルバノミラーのように偏向角が正弦波状に変化する偏向手段を使う場合は、偏向角の大きさに応じたディストーション(偏向角が小さい場合はプラスのディストーション、偏向角が大きい場合はマイナスのディストーション)を結像光学系で発生させ結像光学系をfアークサインθレンズとすることで、被走査面を等速走査することができる。
【0013】
この場合、結像光学系の光学パワーを有する面の中最も被走査面側の面は、各画角の光線位置が大きく異なり光束径も小さいので、ディストーションの補正に有効である。この面を透過作用と反射作用、透過作用と透過作用のように複数の光学作用の兼用面にしようとすると、兼用面にするための制約条件によりディストーションの補正作用が劣化するので、透過作用のみの単独作用面とすることでディストーションの補正を有効に行うことができる。また、画角の確保も容易になる。
【0014】
本発明の第2の走査光学系は、第1の走査光学系において、前記光学部材がプリズム部材として構成されていることを特徴とするものである。
【0015】
この走査光学系は、後記の実施例1〜6が対応する。
【0016】
この走査光学系の作用効果を説明する。一般に、反射面は屈折面より偏心誤差を厳しく制御しなければならないので、組み立て調整作業が大変になる。しかし、光学部材の反射面をプリズム部材の1面として構成すれば、この問題が解決できる。
【0017】
また、偏向手段からプリズム部材に入射する光線が、プリズム部材の入射面で屈折されるので、以降の面への軸外光線の入射光線高を低く設定することができる。そのため、光学系を小型にできると共に、より大きな画角を実現することができる。また、軸外光線の従属光線高も低くなるので、コマ収差等の発生を抑制することもできる。
【0018】
本発明の第3の走査光学系は、第1の走査光学系において、前記光学部材が透過と反射の兼用面を少なくとも1面含むことを特徴とするものである。
【0019】
この走査光学系は、後記の実施例1〜6が対応する。
【0020】
この走査光学系の作用効果を説明する。透過と反射という2つの作用を同一面で行うので、結像光学系を構成する面数を削減し、結像光学系を単純で小型なものにすることができる。この場合、反射作用を全反射作用とすれば、なお好ましい。兼用面における反射を全反射ではなく反射膜での反射により行おうとすると、反射面用の反射膜を透過面用の透過領域と離れた別の位置に形成する必要がある。このため、光学系が大型化する、発生収差が増える等の問題が生ずる。また、反射膜を作製する必要があるので、コストがアップする。
【0021】
本発明の第4の走査光学系は、第2の走査光学系において、前記プリズム部材が透過と反射の兼用面を1面含む3面構成であることを特徴とするものである。
【0022】
この走査光学系は、後記の実施例1〜6が対応する。
【0023】
この走査光学系の作用効果を説明する。第2の走査光学系のプリズム部材を使用する場合、少なくとも、プリズム部材への入射面、2面の反射面、プリズム部材からの射出面が必要となる。兼用面、透過面、反射面からなる3面という最小の面数でプリズム部材を構成できるので、プリズム部材を単純で小型なものにすることができる。
【0024】
本発明の第5の走査光学系は、光源と、前記光源からの光を略平行光にする集光光学系と、前記集光光学系からの射出光を偏向して被走査面上で走査する光偏向手段と、前記光偏向手段により偏向された光を被走査面に結像する結像光学系とからなる走査光学系において、
前記集光光学系から射出して前記光偏向手段に入射する前記集光光学系の最後の面と、前記光偏向手段から前記結像光学系に入射する前記結像光学系の最初の面が同一面であることを特徴とするものである。
【0025】
この走査光学系は、後記の実施例1〜6が対応する。
【0026】
この走査光学系の作用効果を説明する。光源から被走査面に向かう順光線追跡において、光偏向手段の前後の面である「集光光学系を構成する最後の面」と「結像光学系の最初の面」を別々の面とする場合、この2面の位置を離す必要があるので、光偏向手段と光偏向手段の前後の面を離すか、光偏向手段に対する光線入射角を大きくする必要がある。
【0027】
しかし、光偏向手段と光偏向手段の前後の面を離すと光学系が大型化する。また、光偏向手段に対する光線入射角を大きくすると光偏向手段の面積が大きくなるので、大きな偏向角や高い偏向周波数(走査周波数)を確保するのが難しくなる。これは、特に、特開平10−20226号で開示されているようなマイクロマシン技術を利用して製作したマイクロマシンスキャナのように単一の反射面で構成される光偏向手段の場合に大きな問題点となる。
【0028】
光偏向手段の前後の面を同一面とすれば、光偏向手段に対する光線入射角を小さくすることができる。その結果、光偏向手段の面積を小さくすることができるので、光偏向手段の偏向角を大きくしたり偏向周波数(走査周波数)を高周波にすることができる。
【0029】
本発明の第6の走査光学系は、第5の走査光学系において、前記光偏向手段の前後の光学作用面が透過面であることを特徴とするものである。
【0030】
この走査光学系は、後記の実施例1〜6が対応する。
【0031】
この走査光学系の作用効果を説明する。光源から被走査面に向かう順光線追跡において、光偏向手段の前後の光学作用面を反射面とすると、集光光学系を構成する最後の面(反射面1)と結像光学系を構成する最初の面(反射面2)の両方が反射面になるので、反射面1への入射光と反射型光偏向手段の干渉、反射面2での反射光と反射型光偏向手段の干渉を防ぐために、反射型光偏向手段への光線入射角を大きくするか、反射型光偏向手段の前後の面(反射面1=反射面2)と光偏向手段の距離を大きくするか、光偏向手段に対する入射面と主走査面が角度をなす(平行でない)ようにする必要が生ずる。しかし、それぞれの方法では、光偏向手段の面積が大きくなる、光学系の大きさが大きくなる、偏心収差の補正が困難になる等の問題が生ずる。
【0032】
光偏向手段の前後の光学作用面を透過面とすれば、このような問題点を解消することができる。
【0033】
本発明の第7の走査光学系は、第5の走査光学系において、前記結像光学系が透過と反射の兼用面を少なくとも1面含むことを特徴とするものである。
【0034】
この走査光学系は、後記の実施例1〜6が対応する。
【0035】
この走査光学系の作用効果を説明する。透過と反射という2つの作用を同一面で行うので、結像光学系を構成する面数を削減し、結像光学系を単純で小型なものにすることができる。この場合、反射作用を全反射作用とすれば、なお好ましい。兼用面における反射を全反射ではなく反射膜での反射により行おうとすると、反射面用の反射膜を透過面用の透過領域と離れた別の位置に形成する必要がある。このため、光学系が大型化する、発生収差が増える等の問題が生ずる。また、反射膜を作製する必要があるので、コストがアップする。
【0036】
本発明の第8の走査光学系は、光源と、前記光源からの光を略平行光にする集光光学系と、前記集光光学系からの射出光を偏向して被走査面上で走査する光偏向手段と、前記光偏向手段により偏向された光を被走査面に結像する結像光学系とからなる走査光学系において、
前記走査光学系がプリズム部材を含み、前記プリズム部材は、少なくとも前記集光光学系の一部、及び、少なくとも前記結像光学系の一部を含むことを特徴とするものである。
【0037】
この走査光学系は、後記の実施例1〜6が対応する。
【0038】
この走査光学系の作用効果を説明する。集光光学系の一部と結像光学系の一部を一つの光学素子で構成できるので、走査光学系を構成する部品点数を削減することができる。その結果、所望の性能を得るための組み立て時の位置調整作業が楽になるし、低コスト化することができる。
【0039】
本発明の第9の走査光学系は、第8の走査光学系において、前記集光光学系と前記結像光学系が一つのプリズム部材で構成されていることを特徴とするものである。
【0040】
この走査光学系は、後記の実施例1〜3、6が対応する。
【0041】
この走査光学系の作用効果を説明すると、第8の走査光学系の効果がより大きくなる。
【0042】
本発明の第10の走査光学系は、光源と、前記光源からの光を略平行光にする集光光学系と、前記集光光学系からの射出光を偏向して被走査面上で走査する光偏向手段と、前記光偏向手段により偏向された光を被走査面に結像する結像光学系とからなる第1、5又は8の走査光学系において、前記集光光学系と前記結像光学系との合計で3回以上反射することを特徴とするものである。
【0043】
この走査光学系は、後記の実施例1〜6が対応する。
【0044】
この走査光学系の作用効果を説明する。合計3回以上反射させることで折りたたみの効果が大きくなり、走査光学系全体の小型化の効果をより大きくすることができる。
【0045】
本発明の第11の走査光学系は、第8の走査光学系において、少なくとも前記集光光学系の一部、及び、少なくとも前記結像光学系の一部を含む前記プリズム部材が透過と反射の兼用面を持つことを特徴とするものである。
【0046】
この走査光学系は、後記の実施例1〜6が対応する。
【0047】
この走査光学系の作用効果を説明する。透過と反射という2つの作用を同一面で行うので、走査光学系を構成する面数を削減し、光学系を単純で小型なものにすることができる。この場合、反射作用を全反射作用とすれば、なお好ましい。兼用面における反射を全反射ではなく反射膜での反射により行おうとすると、反射面用の反射膜を透過面用の透過領域と離れた別の位置に形成する必要がある。このため、光学系が大型化する、発生収差が増える等の問題が生ずる。また、反射膜を作製する必要があるので、コストがアップする。
【0048】
本発明の第12の走査光学系は、第11の走査光学系において、少なくとも前記集光光学系の一部、及び、少なくとも前記結像光学系の一部を含む前記プリズム部材が2回の透過作用と1回の反射作用の3つの光学作用を行う兼用面を持つことを特徴とするものである。
【0049】
この走査光学系は、後記の実施例1〜6が対応する。
【0050】
この走査光学系の作用効果を説明すると、第11の走査光学系の効果が更に大きくなる。また、プリズム部材の光偏向手段に面した面をこの兼用面とすると、第5の走査光学系の作用効果を得ることができる。
【0051】
本発明の第13の走査光学系は、第8の走査光学系において、少なくとも前記集光光学系の一部、及び、少なくとも前記結像光学系の一部を含む前記プリズム部材において、
前記プリズム部材に含まれる前記集光光学系の部分が、少なくとも、前記プリズム部材への入射面、光学パワーを有し軸上主光線に対して偏心した非回転対称面な反射面、プリズム部材からの射出面の3面を含み、
前記プリズム部材に含まれる前記結像光学系の部分が、少なくとも、前記プリズム部材への再入射面、光学パワーを有し軸上主光線に対して偏心した非回転対称面な反射面、プリズム部材からの再射出面の3面を含むことを特徴とするものである。
【0052】
この走査光学系は、後記の実施例1〜6が対応する。
【0053】
この走査光学系の作用効果を説明する。光学パワーを有する反射面は、レンズ作用と偏向作用を持つので、光学系を小型化する効果が大きい。本走査光学系の場合、集光光学系、結像光学系の両方を小型化できるので、走査光学系全体を小型化できる。
【0054】
しかし、光学パワーを有し軸上主光線に対して偏心した反射面を使用した光学系では、偏心した反射面に対して光線が斜めに入射するために、軸上光線でも偏心によるコマ収差、非点収差等が発生する。この反射面を回転非対称面とすることで、この偏心収差を補正することができる。
【0055】
また、一般に、走査光学系において光偏向手段によって偏向された光を偏心した反射面に入射させる場合、直線走査性が確保できないという問題が生ずるが、結像光学系の反射面を非回転対称な反射面とすることで直線走査性を確保することができる。また、回転非対称面を使うことで、結像光学系を2次元fアークサインθレンズや2次元fθレンズにし、走査光学系で被走査面を等速走査をすることができる。
【0056】
また、プリズム部材に含まれる集光光学系の部分に非回転対称な反射面を使用することで、LDのように楕円状の断面形状を持つ光源に対するビーム整形作用を持たせたり、面倒れ補正機能を持たせることができる。
【0057】
一般に、反射面は屈折面より偏心誤差を厳しく制御しなければならないので、組み立て調整作業が大変になる。しかし、反射面をプリズム部材の1面として構成すれば、この反射面の調整作業が削減できる。
【0058】
また、偏向手段からプリズム部材の結像光学系の部分に入射する光線がプリズム部材の入射面で屈折されるので、以降の面への軸外光線の入射光線高を低く設定することができる。そのため、光学系を小型にできると共に、より大きな画角を実現することができる。また、軸外光線の従属光線高も低くなるので、コマ収差等の発生を抑制することもできる。
【0059】
本発明の第14の走査光学系は、第1、5又は8の走査光学系において、前記結像光学系の非回転対称面が形状に関する対称面を1つだけ持つことを特徴とするものである。
【0060】
この走査光学系は、後記の実施例1〜6が対応する。
【0061】
この走査光学系の作用効果を説明すると、形状に関する対称面を持つことにより製作性を向上させることができる。
【0062】
本発明の第15の走査光学系は、第1、5又は8の走査光学系において、前記集光光学系が形状に関する対称面を1つだけ持つ非回転対称面を含むことを特徴とするものである。
【0063】
この走査光学系は、後記の実施例1〜6が対応する。
【0064】
この走査光学系の作用効果を説明すると、回転非対称な面の作用効果は第13の走査光学系と同じである。形状に関する対称面を1つ持つことによる作用効果は、第14の走査光学系と同じである。以上の作用効果を集光光学系が持つ。
【0065】
本発明の第16の走査光学系は、第1、5又は8の走査光学系において、前記結像光学系の非回転対称面が形状に関する対称面を1つだけ持つ自由曲面であることを特徴とするものである。
【0066】
この走査光学系は、後記の実施例1〜6が対応する。
【0067】
この走査光学系の作用効果を説明する。本発明で使用する自由曲面とは、例えば以下の式(a)で定義されるものである。なお、その定義式のZ軸が自由曲面の軸となる。
【0068】

【0069】
球面項中、
c:頂点の曲率
k:コーニック定数(円錐定数)
r=√(X2 +Y2 )
である。
【0070】
自由曲面項は、
【0071】
上記自由曲面は、一般的には、X−Z面、Y−Z面共に対称面を持つことはないが、本発明ではXの奇数次項を全て0にすることによって、Y−Z面と平行な対称面が1つだけ存在する自由曲面となる。例えば、上記定義式(a)においては、C2 、C5 、C7 、C9 、C12、C14、C16、C18、C20、C23、C25、C27、C29、C31、C33、C35・・・の各項の係数を0にすることによって可能である。
【0072】
また、Yの奇数項を全て0にすることによって、X−Z面と平行な対称面が1つだけ存在する自由曲面となる。例えば、上記定義式においては、C3 、C5 、C8 、C10、C12、C14、C17、C19、C21、C23、C25、C27、C30、C32、C34、C36・・・の各項の係数を0にすることによって可能である。
【0073】
上記対称面の何れか一方を対称面としその対称面方向に偏心させることで、偏心により発生する非回転対称な収差を効果的に補正しながら同時に製作性も向上させることができる。
【0074】
なお、自由曲面の定義式は、Zernike多項式等他の定義式としてもよい。
【0075】
本発明の第17の走査光学系は、第1、5又は8の走査光学系において、前記光偏向手段が、1個の光偏向手段で2次元偏向する2次元光偏向手段であることを特徴とするものである。
【0076】
この走査光学系は、後記の実施例1〜5が対応する。
【0077】
この走査光学系の作用効果を説明する。光偏向手段の面積を小さくするには、結像光学系の入射瞳付近に偏向手段を配置する必要がある。2つの1次元光偏向手段を使って2次元走査を行う場合、光偏向手段の大きさを小さくするには、2つの1次元光偏向手段を共役にするか2つの1次元光偏向手段の間隔を小さくする必要があり、光学系が複雑・大型化する、光学系のレイアウトに関する制約条件が増える等の問題点が生ずる。1つの光偏向手段で2次元偏向すれば、光学系のレイアウトがしやすく、光学系を小型で単純なものにすることができる。
【0078】
本発明の第18の走査光学系は、第1、5又は8の走査光学系において、前記光偏向手段による偏向角が正弦波状に変化することを特徴とするものである。
【0079】
この走査光学系は、後記の実施例1、2、4〜6が対応する(電気的像歪み補正を行えば実施例3も対応する。)。
【0080】
この走査光学系の作用効果を説明する。例えば、特開平10−20226号で開示されているようなマイクロマシン技術を利用して製作したマイクロマシンスキャナは反射ミラーを1面だけ持ち、高速走査をする場合、この反射ミラーは正弦波状に振動し光を反射偏向する。このような光偏向手段を使えば、光偏向手段を小型、低コスト、低消費電力にし、高速走査をすることができる。このとき、走査光学系の結像光学系をfアークサインθレンズにしてやれば、被走査面を等速走査することができる。
【0081】
本発明の第19の走査光学系は、第18の走査光学系において、前記の偏向角が正弦波状に変化する光偏向手段において、光偏向角の振幅の95%以下を走査に利用することを特徴とするものである。
【0082】
この走査光学系は、後記の実施例1、2、4〜6が対応する(電気的像歪み補正を行えば実施例3も対応する。)。
【0083】
この走査光学系の作用効果を説明する。以下、ポリゴンミラー、ガルバノミラー等の反射型偏向器の場合で説明する。図9(a)に示すように、反射型偏向器(反射型偏向手段)の反射面の基準反射面からの振れ角φが、正弦波状に変化する偏向手段を使う場合、電気的な像歪み補正なしに等速走査するには、結像光学系をfアークサインθレンズにする必要がある。
【0084】
反射面の振れ角が振幅φ0 /kで正弦波状に変化する偏向手段において、振れ角の振幅のk倍の振れ角(±φ0 )を利用して被走査面を走査するとする。このとき、結像光学系をfアークサインθレンズにするためには、次式を満たす必要がある(0<k≦1)。
【0085】
像高y=f・2(φ0 /k)arcsin{φ/(φ0 /k)}
偏向が±20°程度の場合、偏向角の全部に対して結像光学系をfアークサインθレンズにするためには、非常に大きなプラスのディストーションを発生させる必要があり結像光学系の設計が困難である。そこで、φ/(φ0 /k)の線形性が良い領域のみを利用すると、結像光学系をfアークサインθレンズにするのが容易になる。
【0086】
kを0.95以下にすると、φ/(φ0 /k)の線形性がk=1の場合と直線の中間程度以下となり、結像光学系をfアークサインθレンズにするのが容易になる。その結果、光学系を単純で小型なものにすることができる。
【0087】
また、通常のディスプレイでも17%程度のブランキング期間があるように、走査光学系においても電気的な処理の関係から偏向角の全部は使用できない。この場合、偏向手段の偏向角の振幅の95%程度が上限となる。
【0088】
図9(b)に示すように、音響光学偏向器AODのような透過型の光偏向手段の場合は、以上の説明において2φを偏向角とみなしてやればよい。
【0089】
本発明の第20の走査光学系は、第1、5又は8の走査光学系において、電気的な等速走査性の補正を行うことを特徴とするものである。
【0090】
この走査光学系は、何れの実施例実施例に適用してもよい。
【0091】
この走査光学系の作用効果を説明する。特に、2次元走査を行う場合、光偏向手段の偏向特性に合わせて結像光学系のディストーションを制御することで、2次元的な直線走査性・等速走査性を確保しようとすると光学系が複雑・大型化する。一方、高速な2次元走査をする場合、直線走査性の電気的な像歪み補正は2次元的な補正になるので、補正をリアルタイムに行うことは困難になる。
【0092】
そこで、直線走査性は結像光学系で確保し等速走査性は電気的な補正を行うことで確保するようにすると、光学系を単純で小型なものにすることができるし、電気的な像歪み補正は主走査方向の1本の走査線に対する補正になるので高速走査にも対応できる。
【0093】
この場合、正弦波状に変化する偏向角の振幅の全てを利用しようとすると、走査速度の速い像の中心付近と走査速度の遅い像の周辺付近の走査速度の差が大きくなりすぎる。その結果、電気的像歪み補正を行う場合でも、精度良く補正を行うことができなくなる。偏向角振幅の85%程度を使用すると、等速走査性の補正が2段階程度でよくなるので好ましい。
【0094】
本発明の第21の走査光学系は、第1、5又は8の走査光学系において、前記光偏向手段による偏向角がリニアに変化することを特徴とするものである。
【0095】
この走査光学系は、後記の実施例3が対応する(電気的像歪み補正を行えば実施例1、2、4〜6も対応する。)。
【0096】
この走査光学系の作用効果を説明する。回転多面鏡(ポリゴンミラー)は等速回転しているので、光偏向角はリニアに変化する。光偏向手段として回転多面鏡(ポリゴンミラー)を使えば、光偏向手段で大きな偏向角を確保でき、走査光学系の画角を大きくすることができる。このとき、走査光学系の結像光学系をfθレンズにすれば、被走査面を等速走査することができる。
【0097】
本発明の第22の走査光学系は、第1、5又は8の走査光学系において、前記結像光学系が、形状に関する対称面を1つだけ持ち、その形状に関する対称面内方向のみで偏心しており、前記走査光学系が、次式を満足することを特徴とするものである。
【0098】
φ2 θ1 /φ1 θ2 <1 ・・・(1)
ここで、被走査面側の対称面内方向における結像光学系の半画角をθ2 、対称面と直交面方向における結像光学系の半画角をθ1 、対称面方向の被走査面の走査に必要な光偏向手段の片側偏向角を2φ2 、対称面と直交面方向の被走査面の走査に必要な光偏向手段の片側偏向角を2φ1 とする。
【0099】
ポリゴンミラー、ガルバノミラーのような反射型偏向手段の場合、走査に必要な反射ミラーの片側振れ角がφ1 、φ2 であることに相当する。ここで言う反射ミラー面の片側振れ角は、被走査面の中心に対応する反射ミラー面からの最大ずれ角である。この場合、必ずしも光偏向手段の反射ミラーが±φ振れるというわけではない。反射ミラーの振幅の一部を利用して被走査面の走査を行う場合は、走査に利用するのが±φということである。また、音響光学偏向器AODのような透過型の光偏向手段の場合は、片側偏向角が2φ1 、2φ2 に相当する(図9)。 この走査光学系は、後記の実施例1〜6が対応する。
【0100】
この走査光学系の作用効果を説明する。ポリゴンミラー、ガルバノミラーのような反射型の光偏向手段を使用した場合で説明する(図9(a))。反射型光偏向手段の片側振れ角がφ(偏向角が2φ)のとき、結像光学系の走査半画角がθとする。このとき、順追跡における、結像光学系の瞳倍率=2φ/θである。
【0101】
結像光学系が形状に関する対称面を1面だけ持ち、その対称面内のみで偏心していると、結像光学系の製作性が向上し、コストも下がるので好ましい。この場合、形状に関する対称面と垂直方向は広画角を確保しやすいので、この方向を1次元走査光学系の走査方向あるいは2次元走査光学系の走査画角の大きい方向にするとよい。このとき、結像光学系を偏心させている面内方向は、偏心した面と面が干渉しないように光学系を構成する必要があるので、結像光学系を構成するのが難しくなる。
【0102】
そこで、結像光学系を偏心させている方向(結像光学系の形状に関する対称面内方向)の瞳倍率を対称面と垂直方向の瞳倍率より小さくし、結像光学系内での光束の広がり角を小さくした方が結像光学系を構成しやすくなる。
【0103】
すなわち、次式を満足することが望ましい。
【0104】
1>対称面内の瞳倍率/対称面と直交面内の瞳倍率
=(2φ2 /θ2 )/(2φ1 /θ1 )
=φ2 θ1 /φ1 θ2
結像光学系の形状に関する対称面方向を副走査方向、対称面と垂直方向を主走査方向とする場合、走査面での主走査方向と副走査方向の結像光学系の分解能を等しくするには、光偏向手段の副走査方向の寸法を主走査方向の寸法より大きくする必要が生ずる。2次元走査を行う場合に、高速走査が必要となるの主走査方向の寸法が小さいので、高速走査に対応しやすくなる。
【0105】
本発明の第23の走査光学系は、第22の走査光学系において、以下の条件式を満足することを特徴とするものである。
【0106】
NA2/NA1>1 ・・・(2)
ここで、形状に関する対称面内方向における光源から集光光学系への入射する光束の開口数をNA2、形状に関する対称面と垂直方向における光源から集光光学系への入射する光束の開口数をNA1とする。
【0107】
この走査光学系は、後記の実施例1〜6が対応する。
【0108】
この走査光学系の作用効果を説明する。結像光学系の形状に関する対称面方向を副走査方向、対称面と垂直方向を主走査方向とする場合、走査面での主走査方向と副走査方向での結像光学系の分解能を等しくするには、光偏向手段の副走査方向の寸法を主走査方向の寸法より大きくする必要が生ずる。
【0109】
光源を発した光が、走査手段において上記形状になるためには、条件式(2)を満足した方が集光光学系の構成が容易になる。
【0110】
【発明の実施の形態】
以下に、本発明の走査光学系の実施例1から実施例6について図面を参照して説明する。
【0111】
以下の説明では、X方向を主走査方向、Y方向を副走査方向として説明する。
【0112】
各実施例の逆光線追跡での構成パラメータは後記するが、その各実施例の構成パラメータにおいては、図1に示すように、逆光線追跡で、軸上主光線1を、不図示の被走査面の中心を垂直に通り、光偏向手段12を経て光源11の中心に至る光線で定義する。
【0113】
そして、逆光線追跡において、無偏心状態に戻した第1面4T(実際にはY方向に偏心している。)を偏心光学系の原点とし、軸上主光線1に沿う方向をZ軸方向とし、被走査面から光学系10の第1面4Tに向かう方向をZ軸正方向とし、このZ軸と被走査面中心を含む平面をY−Z平面(図1の面)とし、原点を通りY−Z平面に直交し、紙面の手前から裏方向に向かう方向をX軸正方向とし、X軸、Z軸と右手直交座標系を構成する軸をY軸とする。図1には、この座標系を図示してある。その他の実施例を示す図4〜図8については、この座標系の図示は省く。
【0114】
偏心面については、上記座標系の原点から、その面の面頂位置の偏心量(X軸方向、Y軸方向、Z軸方向をそれぞれX,Y,Z)と、その面の中心軸(自由曲面については、前記(a)式のZ軸)のX軸、Y軸、Z軸それぞれを中心とする傾き角(それぞれα,β,γ(°))とが与えられている。なお、その場合、αとβの正はそれぞれの軸の正方向に対して反時計回りを、γの正はZ軸の正方向に対して時計回りを意味する。
【0115】
実施例1〜6では、このY−Z平面内で各面の偏心を行っており、また、各回転非対称自由曲面の唯一の対称面をY−Z面としている。
【0116】
また、各実施例の光学系を構成する光学作用面の中、特定の面(仮想面を含む。)とそれに続く面が共軸光学系を構成する場合に、面間隔が与えられており、その他、媒質の屈折率、アッベ数が慣用法に従って与えられている。
【0117】
また、本発明で用いられる自由曲面の面の形状は前記(a)式により定義し、その定義式のZ軸が自由曲面の軸となる。
【0118】
また、DOE(回折光学素子)については、設計法としてSweatt法(超高屈折率法)を使用し(W.C.Sweatt,"Mathematical equivalence between a holographic optical element and an ultra-high index lens",J.Opt.Soc.Am,Vol.69,No.3(1979) )、基準波長=587.56nm(d線)とし、その基準波長における超高屈折率レンズの屈折率=1001、アッベ数=−3.45とした。
【0119】
なお、データの記載されていない自由曲面に関する項は0である。屈折率については、d線(波長587.56nm)に対するものを表記してある。長さの単位はmm、角度の単位は°である。
【0120】
また、自由曲面の他の定義式として、以下の(b)式で与えられるZernike多項式がある。この面の形状は以下の式により定義する。その定義式のZ軸がZernike多項式の軸となる。回転非対称面の定義は、X−Y面に対するZの軸の高さの極座標で定義され、AはX−Y面内のZ軸からの距離、RはZ軸回りの方位角で、Z軸から測った回転角で表せられる。
【0121】
【0122】
その他の面の例として、次の定義式(c)があげられる。
【0123】
Z=ΣΣCnmXY
例として、k=7(7次項)を考えると、展開したとき、以下の式で表せる。
【0124】
【0125】
(実施例1)
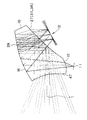
この実施例の走査光学系の光軸を含むY−Z平面図(副走査方向面内における断面図)を図1に示す。この走査光学系の水平画角54°、垂直画角42°であり、光偏向手段の大きさはφ1mmである。
【0126】
この走査光学系10の構成は、図示しない光源輝度変調手段により、映像信号に応じて光源11を輝度変調し、映像信号に応じた2次元走査(ラスタスキャン)を行うことで、結像光学系の前方の1mの位置の被走査面に結像し被走査面を2次元走査するものである。
【0127】
この走査光学系10の光路は、光源11から図示しない像面(被走査面)に到る順光線追跡で、第1透過面1T、第1反射面1R、第2透過面2Tで構成される集光光学系により光源光が略平行にされる。略平行光にされた光源光は、2次元スキャナ12で反射偏向される。反射偏向された光は、第3透過面3T、第2反射面2R、第3反射面(全反射)3R、第4透過面4Tで構成される結像光学系により被走査面に結像し被走査面を2次元走査する。
【0128】
光源11として、LED、LD等が使用できる。複数の単色光源を利用してカラー表示する場合は、例えば、図2に示すようにすればよい。図2において、短波長光、例えば500nm以下の波長の光を反射させるダイクロイックミラー24を直角プリズムからなる光源プリズム21と光源プリズム22の接合面にコーティングし、長波長光、例えば600nm以上の光を反射させるダイクロイックミラー25を直角プリズムからなる光源プリズム22と光源プリズム23の接合面にコーティングしている。そして、B光源11B 、R光源11R 、G光源11G を、それぞれ光源プリズム21、光源プリズム22、光源プリズム23のそれぞれの波長において被走査面の像点と共役な位置に接着し、走査光学系の色収差の影響を除去している。
【0129】
この構成により、RGB光を走査光学系10に導き、カラー表示を行うことができる。このとき、図示しないRGB用強度変調装置により、映像信号に基づき各画素ごとにRGB光のそれぞれを輝度変調する。
【0130】
走査手段(2次元スキャナ)12としていくつかのものを使用することができるが、特開平10−20226号で開示されているようなマイクロマシン技術を利用して製作したマイクロマシンスキャナは、小型、低消費電力等の利点を持つので、小型光学系用としては最適である。
【0131】
この場合、電磁駆動方式、静電駆動方式、圧電素子駆動方式等、各種駆動方式のマイクロマシンスキャナが使用できる。2次元マイクロマシンスキャナの1例の平面図を図3に示す。この例では、ミラー部34をY軸方向に延びるトーションバー33で中間枠32に連結し、その中間枠32をX軸方向に延びるトーションバー31で外枠30に連結して、トーションバー33の回りでの揺動により水平走査(X方向走査)、トーションバー31の回りでの揺動により垂直走査(Y方向走査)するようにしている。
【0132】
一般に、反射面を複数面持つ回転多面鏡(ポリゴンミラー)をスキャナとして使用する場合は、光学系が面倒れ補正機能を持つ必要がある。しかし、図3に示すようなマイクロマシンスキャナは反射面を1面34しか持たないし、問題となる面倒れはスキャナの構造上発生しないので、光学系が面倒れ補正機能を持つ必要がなく光学系の構成を単純にできる。
【0133】
この場合、反射面の基準面に対する軸上主光線の入射角θs が、次式を満足することが好ましい。
【0134】
θs ≦45°
この条件の上限の45°を越えると、同じ光束を反射偏向する場合でも、反射面の面積が大きくなるので、大偏向角や高走査周波数を確保するのが難しくなる。本実施例では、θs=20°である。
【0135】
なお、正弦波状に往復振動するスキャナの振れ角の往路だけの片側走査でも、往路と復路両方の往復走査でもどちらでもよいが、往復走査を行うと走査手段の走査周波数を半分にできるので高速走査に対応しやすい。
【0136】
この実施例の走査光学系10の利点について説明する。プリズム部材10の1個で集光光学系と結像光学系を構成しているので、先行例に比べ大幅に部品点数を削減し、光学系が小型化、低コスト化できる。また、部品点数が少ないので位置調整作業が削減でき、製作時に性能を確保するのも容易になる。
【0137】
また、集光光学系で1回反射、結像光学系で2回反射、スキャナで1回反射の計4回反射しているので、折り畳みの効果により光学系を小型化できている。また、走査光学系10の主たるパワーを反射面が持つので、色収差の発生が少なく、LDを光源とした場合でもLDの波長変動による走査光学系10の光学性能の変化が少ない。また、凸パワー作用を持つ第2反射面2Rと凹パワー作用を持つ第3反射面(全反射面)3Rの組み合わせにより、走査画角全域における像面湾曲を補正している。
【0138】
また、反射作用と透過作用を兼ねる兼用面2T(3T,3R)があるので、光学系を構成する面数が削減でき、集光光学系と結像光学系を小型化できている。この面を偏向手段12に対して凹面形状にした方が、反射作用を全反射作用にしやすい。
【0139】
また、直線走査性、等速走査性に関して、一般に、反射型走査光学系では直線走査性の確保が問題となる。本実施例では、反射面が偏心収差を補正する回転非対称な形状なので、2次元的な直線走査性を確保している。
【0140】
2次元走査に必要なスキャンミラー12の振れ角は、φx=±7.95°、φy=±3.20°であり、この場合、正弦波状に振動するスキャンミラーの65%程度に対して結像光学系がfアークサインθレンズ特性を持つので、2次元的な直線走査、等速走査を行うことができる(X方向のスキャンミラー振れ角φx=±12.2°の振幅の65%が、X方向の走査に必要なミラー振れ角φx=±7.95°。Y方向のスキャンミラー振れ角φy=±4.93°の振幅の65%が、Y方向の走査に必要なミラー振れ角φy=±3.20°。)。
【0141】
スキャンミラー12の振れ角が本実施例程度の場合、結像光学系をfアークサインθレンズにするには、結像光学系でプラスのディストーションを発生させる必要がある。本実施例のように、結像光学系の光学パワーを有する面の中最も被走査面側の面4Tを透過作用のみの単独作用面とすることでディストーションの補正を有効に行うことができる。また、画角の確保も容易になる。
【0142】
なお、結像光学系により形成される非等速走査像を等速走査像に変換する電気的な像歪み補正(等速走査性の補正)を行えば、正弦波状に振動するスキャンミラー12の振幅全部を利用することもできるし、スキャンミラー振れ角がリニアに変化するスキャナを利用することもできる。
【0143】
また、集光光学系にビーム整形機能を持たせている。偏向手段12をφ1mmとする場合、集光光学系の光源側NAは、X方向が0.16、Y方向が0.19である。
【0144】
次に、この実施例の変形について述べると、ここでは、点状光源11を2次元スキャンすることで2次元像を形成しているが、線状のアレー光源を1次元スキャンするようにしてもよい。
【0145】
また、ここではスキャナのX方向の寸法=Y方向の寸法として設計を行っているが、被走査面側でのX方向の分解能とY方向の分解能を等しくする等のためにスキャナ12のX方向の寸法≠Y方向の寸法としてもよい。
【0146】
(実施例2)
この実施例の走査光学系の図1と同様の図を図4に示す。この走査光学系の水平画角54°、垂直画角42°である。
【0147】
この走査光学系10の構成は、実施例1と同様であり、図示しない光源輝度変調手段により、映像信号に応じて光源11を輝度変調し、映像信号に応じた2次元走査(ラスタスキャン)を行うことで、結像光学系の前方の1mの位置の被走査面に結像し被走査面を2次元走査するものである。
【0148】
この走査光学系10の光路は、光源11から図示しない像面(被走査面)に到る順光線追跡で、第1透過面1T、第1反射面1R、第2透過面2Tで構成される集光光学系により光源光が略平行にされる。略平行光にされた光源光は、2次元スキャナ12で反射偏向される。反射偏向された光は、第3透過面3T、第2反射面2R、第3反射面(全反射)3R、第4透過面4Tで構成される結像光学系により被走査面に結像し被走査面を2次元走査する。
【0149】
この実施例は、実施例1よりfアークサインθレンズ特性を向上させたタイプである。正弦波状に振動するスキャンミラー12に対して、X方向、Y方向共スキャンミラー振れ角振幅の約70%に対してfアークサインθレンズ特性を持つ。
【0150】
なお、ディストーションをコントロールしやすい位置であるプリズム10と被走査面の間等にレンズを追加すれば、fアークサインθレンズ特性を更に向上させることができる。
【0151】
(実施例3)
この実施例の走査光学系の図1と同様の図を図5に示す。この走査光学系の水平画角54°、垂直画角42°であり、光偏向手段の大きさはφ1mmである。
【0152】
この走査光学系10の構成は、実施例1、2と同様であり、図示しない光源輝度変調手段により、映像信号に応じて光源11を輝度変調し、映像信号に応じた2次元走査(ラスタスキャン)を行うことで、結像光学系の前方の1mの位置の被走査面に結像し被走査面を2次元走査するものである。
【0153】
この走査光学系10の光路は、光源11から図示しない像面(被走査面)に到る順光線追跡で、第1透過面1T、第1反射面1R、第2透過面2Tで構成される集光光学系により光源光が略平行にされる。略平行光にされた光源光は、2次元スキャナ12で反射偏向される。反射偏向された光は、第3透過面3T、第2反射面2R、第3反射面(全反射)3R、第4透過面4Tで構成される結像光学系により被走査面に結像し被走査面を2次元走査する。
【0154】
この実施例は、回転多面鏡(ポリゴン)のように偏向角がリニアに変化する偏向手段12を使った場合、被走査面で等速走査ができるように結像光学系をfθレンズ(X方向の主走査方向、Y方向の副走査方向に関する2次元fθレンズ)にしたものである。
【0155】
(実施例4)
この実施例の走査光学系の図1と同様の図を図6に示す。この走査光学系の水平画角47°、垂直画角36°であり、光偏向手段の大きさはφ1.1mmである。
【0156】
この走査光学系10の構成は、実施例1〜3の配置において、プリズム10とスキャナ12の間にDOE(回折光学素子)13を配置してなるものであり、図示しない光源輝度変調手段により、映像信号に応じて光源11を輝度変調し、映像信号に応じた2次元走査(ラスタスキャン)を行うことで、結像光学系の前方の1mの位置の被走査面に結像し被走査面を2次元走査するものである。
【0157】
この走査光学系10の光路は、光源11から図示しない像面(被走査面)に到る順光線追跡で、第1透過面1T、第1反射面1R、第2透過面2T、スキャナ12側の面に回折面14を設けたDOE13で構成される集光光学系により光源光が略平行にされる。略平行光にされた光源光は、2次元スキャナ12で反射偏向される。反射偏向された光は、スキャナ12側の面に回折面14を設けたDOE13、第3透過面3T、第2反射面2R、第3反射面(全反射)3R、第4透過面4Tで構成される結像光学系により被走査面に結像し被走査面を2次元走査する。
【0158】
この実施例は、プリズム10とスキャナ12の間にDOE13を配置し、走査光学系の色収差を補正したものであり、光源11から被走査面に向かう順光線追跡で、集光光学系から射出してスキャナ12へ向かう際とスキャナ12から結像光学系に入射する際の両方で、DOE13の作用を受けるようにしている。
【0159】
なお、2次元スキャナ12としてマイクロマシンスキャナを使用する場合、DOE13を形成した基板をスキャナ12の保護部材や密閉部材として使用する等、スキャナ12と一体化してもよい。
【0160】
(実施例5)
この実施例の走査光学系の図1と同様の図を図7に示す。この走査光学系10の構成は、実施例1〜3の配置において、光源11とプリズム10の間にDOE13を配置してなるものであり、図示しない光源輝度変調手段により、映像信号に応じて光源11を輝度変調し、映像信号に応じた2次元走査(ラスタスキャン)を行うことで、結像光学系の前方の1mの位置の被走査面に結像し被走査面を2次元走査するものである。
【0161】
この走査光学系10の光路は、光源11から図示しない像面(被走査面)に到る順光線追跡で、プリズム10側の面に回折面14を設けたDOE13、第1透過面1T、第1反射面1R、第2透過面2Tで構成される集光光学系により光源光が略平行にされる。略平行光にされた光源光は、2次元スキャナ12で反射偏向される。反射偏向された光は、第3透過面3T、第2反射面2R、第3反射面(全反射)3R、第4透過面4Tで構成される結像光学系により被走査面に結像し被走査面を2次元走査する。
【0162】
この実施例は、光源11とプリズム10の間にDOE13を配置し、走査光学系の色収差を補正したものである。
【0163】
(実施例6)
この実施例の走査光学系の図1と同様の図を図8に示す。この走査光学系は水平画角82°、スキャナの大きさはφ2.6mmの1次元走査光学系である。
【0164】
この走査光学系10の構成は、実施例1と略同様であり、図示しない光源輝度変調手段により、映像信号に応じて光源11を輝度変調し、映像信号に応じた水平方向(X方向)に1次元走査を行うことで、無偏心状態に戻した第1面4Tから前方の10mmの位置の被走査面に結像し被走査面を1次元走査するものである。
【0165】
この走査光学系10の光路は、光源11から図示しない像面(被走査面)に到る順光線追跡で、第1透過面1T、第1反射面1R、第2透過面2Tで構成される集光光学系により光源光が略平行にされる。略平行光にされた光源光は、1次スキャナ12で反射偏向される。反射偏向された光は、第3透過面3T、第2反射面2R、第3反射面(全反射)3R、第4透過面4Tで構成される結像光学系により被走査面に結像し被走査面を1次元走査する。
【0166】
この実施例は、主走査方向(X方向)は、正弦波状に振れ角が変化するスキャナ12の振れ角振幅の95%に対してfアークサインθレンズ特性を持つ。
【0167】
以下に上記実施例1〜6の構成パラメータ(レンズデータ)を示す。これら表中の“FFS”は自由曲面、“RS”は反射面、“DOE”は回折面を示す。なお、スキャナは絞り面に、光源は像面に配置される。
【0168】
上記各実施例における条件式(1)、(2)関係の値は以下の通りである。なお、主光線に対する上側マージナル光線と下側マージナル光線が非対称な場合は、両者の平均によりNAy(NA2)を求めた。
以上の実施例では、前記定義式(a)の自由曲面により光学系を構成したが、他の定義の曲面でも光学系を構成できることはいうまでもない。
【0176】
以上、本発明の走査光学系を実施例に基づいて説明してきたが、本発明はこれらの実施例に限定されず数々の変形が可能である。
【0177】
以上の本発明の走査光学系は例えば次のように構成することができる。
【0178】
〔1〕 光源からの光を偏向して被走査面上で走査する光偏向手段と、前記光偏向手段により偏向された光を被走査面に結像する結像光学系とからなる走査光学系において、
前記結像光学系が光学部材を含み、前記光学部材の光学パワーを有する面の中最も被走査面側の面が透過作用の単独作用面で、
前記光学部材が光学パワーを有し軸上主光線に対して偏心した非回転対称面を少なくとも1面含む2面以上の反射面を含むことを特徴とする走査光学系。
【0179】
〔2〕 前記光学部材がプリズム部材として構成されていることを特徴とする上記1記載の走査光学系。
【0180】
〔3〕 前記光学部材が透過と反射の兼用面を少なくとも1面含むことを特徴とする上記1記載の走査光学系。
【0181】
〔4〕 前記プリズム部材が透過と反射の兼用面を1面含む3面構成であることを特徴とする上記2記載の走査光学系。
【0182】
〔5〕 光源と、前記光源からの光を略平行光にする集光光学系と、前記集光光学系からの射出光を偏向して被走査面上で走査する光偏向手段と、前記光偏向手段により偏向された光を被走査面に結像する結像光学系とからなる走査光学系において、
前記集光光学系から射出して前記光偏向手段に入射する前記集光光学系の最後の面と、前記光偏向手段から前記結像光学系に入射する前記結像光学系の最初の面が同一面であることを特徴とする走査光学系。
【0183】
〔6〕 前記光偏向手段の前後の光学作用面が透過面であることを特徴とする上記5記載の走査光学系。
【0184】
〔7〕 前記結像光学系が透過と反射の兼用面を少なくとも1面含むことを特徴とする上記5記載の走査光学系。
【0185】
〔8〕 光源と、前記光源からの光を略平行光にする集光光学系と、前記集光光学系からの射出光を偏向して被走査面上で走査する光偏向手段と、前記光偏向手段により偏向された光を被走査面に結像する結像光学系とからなる走査光学系において、
前記走査光学系がプリズム部材を含み、前記プリズム部材は、少なくとも前記集光光学系の一部、及び、少なくとも前記結像光学系の一部を含むことを特徴とする走査光学系。
【0186】
〔9〕 前記集光光学系と前記結像光学系が一つのプリズム部材で構成されていることを特徴とする上記8記載の走査光学系。
【0187】
〔10〕光源と、前記光源からの光を略平行光にする集光光学系と、前記集光光学系からの射出光を偏向して被走査面上で走査する光偏向手段と、前記光偏向手段により偏向された光を被走査面に結像する結像光学系とからなる走査光学系において、
前記集光光学系と前記結像光学系との合計で3回以上反射することを特徴とする上記1、5又は8記載の走査光学系。
【0188】
〔11〕 少なくとも前記集光光学系の一部、及び、少なくとも前記結像光学系の一部を含む前記プリズム部材が透過と反射の兼用面を持つことを特徴とする上記8記載の走査光学系。
【0189】
〔12〕 少なくとも前記集光光学系の一部、及び、少なくとも前記結像光学系の一部を含む前記プリズム部材が2回の透過作用と1回の反射作用の3つの光学作用を行う兼用面を持つことを特徴とする上記11記載の走査光学系。
【0190】
〔13〕 少なくとも前記集光光学系の一部、及び、少なくとも前記結像光学系の一部を含む前記プリズム部材において、
前記プリズム部材に含まれる前記集光光学系の部分が、少なくとも、前記プリズム部材への入射面、光学パワーを有し軸上主光線に対して偏心した非回転対称面な反射面、プリズム部材からの射出面の3面を含み、
前記プリズム部材に含まれる前記結像光学系の部分が、少なくとも、前記プリズム部材への再入射面、光学パワーを有し軸上主光線に対して偏心した非回転対称面な反射面、プリズム部材からの再射出面の3面を含むことを特徴とする上記8記載の走査光学系。
【0191】
〔14〕 前記結像光学系の非回転対称面が形状に関する対称面を1つだけ持つことを特徴とする上記1、5又は8記載の走査光学系。
【0192】
〔15〕 前記集光光学系が形状に関する対称面を1つだけ持つ非回転対称面を含むことを特徴とする上記1、5又は8記載の走査光学系。
【0193】
〔16〕 前記結像光学系の非回転対称面が形状に関する対称面を1つだけ持つ自由曲面であることを特徴とする上記1、5又は8記載の走査光学系。
【0194】
〔17〕 前記光偏向手段が、1個の光偏向手段で2次元偏向する2次元光偏向手段であることを特徴とする上記1、5又は8記載の走査光学系。
【0195】
〔18〕 前記光偏向手段による偏向角が正弦波状に変化することを特徴とする上記1、5又は8記載の走査光学系。
【0196】
〔19〕 前記の偏向角が正弦波状に変化する光偏向手段において、光偏向角の振幅の95%以下を走査に利用することを特徴とする上記18記載の走査光学系。
【0197】
〔20〕 電気的な等速走査性の補正を行うことを特徴とする上記1、5又は8記載の走査光学系。
【0198】
〔21〕 前記光偏向手段による偏向角がリニアに変化することを特徴とする上記1、5又は8記載の走査光学系。
【0199】
〔22〕 前記結像光学系が、形状に関する対称面を1つだけ持ち、その形状に関する対称面内方向のみで偏心しており、前記走査光学系が、次式を満足することを特徴とする上記1、5又は8記載の走査光学系。
【0200】
φ2 θ1 /φ1 θ2 <1 ・・・(1)
ここで、被走査面側の対称面内方向における結像光学系の半画角をθ2 、対称面と直交面方向における結像光学系の半画角をθ1 、対称面方向の被走査面の走査に必要な光偏向手段の片側偏向角を2φ2 、対称面と直交面方向の被走査面の走査に必要な光偏向手段の片側偏向角を2φ1 とする。
【0201】
〔23〕 以下の条件式を満足することを特徴とする上記22記載の走査光学系。
【0202】
NA2/NA1>1 ・・・(2)
ここで、形状に関する対称面内方向における光源から集光光学系への入射する光束の開口数をNA2、形状に関する対称面と垂直方向における光源から集光光学系への入射する光束の開口数をNA1とする。
【0203】
【発明の効果】
本発明は、走査光学系を反射作用を含むプリズム部材を中心に構成することにより、走査光学系の部品点数を削減し、光学系を小型にすることができる。
【図面の簡単な説明】
【図1】本発明の実施例1の走査光学系の光路図である。
【図2】複数の単色光源を利用してカラー表示する場合の光源の構成例を示す図である。
【図3】2次元マイクロマシンスキャナの1例の平面図である。
【図4】本発明の実施例2の走査光学系の光路図である。
【図5】本発明の実施例3の走査光学系の光路図である。
【図6】本発明の実施例4の走査光学系の光路図である。
【図7】本発明の実施例5の走査光学系の光路図である。
【図8】本発明の実施例6の走査光学系の光路図である。
【図9】反射型光偏向手段と透過型光偏向手段の基本形構成を示す図である。
【図10】従来の1つの走査光学系の構成を示す図である。
【図11】従来の別のもう1つの走査光学系の構成を示す図である。
【符号の説明】
1…軸上主光線
1T…第1透過面
1R…第1反射面
2T…第2透過面
2R…第2反射面
3T…第3透過面
3R…第3反射面(全反射)
4T…第4透過面
10…走査光学系(プリズム)
11…光源
11B …B光源
11R …R光源
11G …G光源
12…光偏向手段(スキャナ)
13…DOE(回折光学素子)
14…回折面
21、22、23…光源プリズム
24、25…ダイクロイックミラー
30…外枠
31…トーションバー
32…中間枠
33…トーションバー
34…ミラー部
Claims (9)
- 光源と、前記光源からの光を略平行光にする集光光学系と、前記集光光学系からの射出光を偏向して被走査面上で走査する光偏向手段と、前記光偏向手段により偏向された光を被走査面に結像する結像光学系とからなる走査光学系において、
前記集光光学系から射出して前記光偏向手段に入射する前記集光光学系の最後の面と、前記光偏向手段から前記結像光学系に入射する前記結像光学系の最初の面が同一面であり、前記同一面が、前記集光光学系から前記光偏向手段に光を射出する際に透過面として作用し、前記光偏向手段から前記結像光学系に光が入射する際に透過面として作用し、前記結像光学系内を光が通過する際に反射面として作用することを特徴とする走査光学系。 - 光学作用面として、前記光源からの光を透過する第一の透過面と、前記第一の透過面を透過した光を反射する第一の反射面と、前記同一面と、前記光偏向手段から前記結像光学系に入射した光を反射する第二の反射面と、前記同一面で反射された光を透過する第二の透過面とからなるプリズムを備えることを特徴とする請求項1記載の走査光学系。
- 前記同一面と対向する位置に前記光偏向手段が配置され、
前記同一面が前記光偏向手段に対して凹形状となっていることを特徴とする請求項1又は2記載の走査光学系。 - 前記同一面に対向する位置に前記第二の反射面が位置し、
前記反射面は凸パワー作用を有し、
前記同一面は凹パワー作用を有することを特徴とする請求項2から3の何れか1項記載の走査光学系。 - 前記第二の透過面が、前記プリズムの最も前記被走査面側に位置していることを特徴とする請求項2から4の何れか1項記載の走査光学系。
- 前記同一面と前記第二の反射面は回転非対称な面形状であることを特徴とする請求項2から5の何れか1項に記載の走査光学系。
- 光源からの光を偏向して被走査面上で走査する光偏向手段と、前記光偏向手段により偏向された光を被走査面に結像する結像光学系とからなる走査光学系において、
前記結像光学系が光学部材を含み、前記光学部材の光学パワーを有する面の中最も被走査面側の面が透過作用の単独作用面で、
前記光学部材が光学パワーを有し軸上主光線に対して偏心した非回転対称面を少なくとも1面含む2面以上の反射面を含むことを特徴とする走査光学系。 - 光源と、前記光源からの光を略平行光にする集光光学系と、前記集光光学系からの射出光を偏向して被走査面上で走査する光偏向手段と、前記光偏向手段により偏向された光を被走査面に結像する結像光学系とからなる走査光学系において、
前記走査光学系がプリズム部材を含み、前記プリズム部材は、少なくとも前記集光光学系の一部、及び、少なくとも前記結像光学系の一部を含み、
前記プリズム部材は、兼用面を有し、前記兼用面は、前記集光光学系から前記光偏向手段に光を射出する際に透過面として作用し、前記光偏向手段から前記結像光学系に光が入射する際に透過面として作用し、前記結像光学系内を光が通過する際に反射面として作用することを特徴とする走査光学系。 - 前記結像光学系が、形状に関する対称面を1つだけ持ち、その形状に関する対称面内方向のみで偏心しており、前記走査光学系が、次式を満足することを特徴とする請求項1から8の何れか1項記載の走査光学系。
φ2 θ1 /φ1 θ2 <1 ・・・(1)
ここで、被走査面側の対称面内方向における結像光学系の半画角をθ2 、対称面と直交面方向における結像光学系の半画角をθ1 、対称面方向の被走査面の走査に必要な光偏向手段の片側偏向角を2φ2 、対称面と直交面方向の被走査面の走査に必要な光偏向手段の片側偏向角を2φ1 とする。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000090490A JP4594485B2 (ja) | 2000-03-29 | 2000-03-29 | 走査光学系 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000090490A JP4594485B2 (ja) | 2000-03-29 | 2000-03-29 | 走査光学系 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2001281583A JP2001281583A (ja) | 2001-10-10 |
| JP2001281583A5 JP2001281583A5 (ja) | 2007-05-10 |
| JP4594485B2 true JP4594485B2 (ja) | 2010-12-08 |
Family
ID=18606093
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000090490A Expired - Fee Related JP4594485B2 (ja) | 2000-03-29 | 2000-03-29 | 走査光学系 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4594485B2 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004004256A (ja) * | 2002-05-31 | 2004-01-08 | Sony Corp | 光走査装置及び2次元画像形成装置 |
| JP4129976B2 (ja) | 2002-07-16 | 2008-08-06 | オリンパス株式会社 | 投影観察装置 |
| JP4012007B2 (ja) * | 2002-08-09 | 2007-11-21 | キヤノン株式会社 | 走査型表示光学系、走査型画像表示装置および走査型画像表示システム |
| JP2004177920A (ja) | 2002-08-09 | 2004-06-24 | Olympus Corp | 投影観察装置 |
| JP4266660B2 (ja) * | 2003-02-18 | 2009-05-20 | キヤノン株式会社 | 投射型表示光学系および投射型画像表示装置 |
| JP4225816B2 (ja) | 2003-03-28 | 2009-02-18 | オリンパス株式会社 | 投影光学装置 |
| JP4035476B2 (ja) * | 2003-04-23 | 2008-01-23 | キヤノン株式会社 | 走査光学系、走査型画像表示装置および画像表示システム |
| JP4522109B2 (ja) | 2004-02-19 | 2010-08-11 | キヤノン株式会社 | 2次元走査装置及びそれを用いた走査型画像表示装置 |
| JP2005321474A (ja) * | 2004-05-06 | 2005-11-17 | Olympus Corp | 対物レンズおよびそれを用いた光ヘッド装置 |
| JP4522253B2 (ja) * | 2004-12-24 | 2010-08-11 | キヤノン株式会社 | 光走査装置及びそれを用いた画像表示装置 |
| JP4612853B2 (ja) | 2005-03-29 | 2011-01-12 | キヤノン株式会社 | 指示位置認識装置及びそれを有する情報入力装置 |
| DE602006015748D1 (de) * | 2005-08-31 | 2010-09-09 | Lg Electronics Inc | Tragbarer Projektor |
| US7959302B2 (en) | 2006-03-28 | 2011-06-14 | Seiko Epson Corporation | Display device and game machine |
| JP5167634B2 (ja) | 2006-12-15 | 2013-03-21 | コニカミノルタアドバンストレイヤー株式会社 | レーザー投射装置 |
| JP2009244330A (ja) * | 2008-03-28 | 2009-10-22 | Funai Electric Co Ltd | 投射型画像表示装置 |
| US20100060863A1 (en) * | 2008-09-11 | 2010-03-11 | Microvision, Inc. | Distortion Altering Optics for MEMS Scanning Display Systems or the Like |
| US8992028B2 (en) * | 2011-04-14 | 2015-03-31 | Microvision, Inc. | Free form optical redirection apparatus and devices using same |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63214714A (ja) * | 1987-03-04 | 1988-09-07 | Ricoh Co Ltd | 光書込光学系 |
| JPH11326817A (ja) * | 1998-05-13 | 1999-11-26 | Minolta Co Ltd | 走査型映像観察光学系 |
-
2000
- 2000-03-29 JP JP2000090490A patent/JP4594485B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001281583A (ja) | 2001-10-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4594485B2 (ja) | 走査光学系 | |
| JP3631182B2 (ja) | 画像投射装置 | |
| JP4372891B2 (ja) | 映像表示装置 | |
| JP3193546B2 (ja) | 反射型走査光学系 | |
| JP4035476B2 (ja) | 走査光学系、走査型画像表示装置および画像表示システム | |
| EP1584966B1 (en) | Image displaying apparatus | |
| US7385745B2 (en) | Two-dimensional scanning apparatus and scanning type image displaying apparatus using the same | |
| US20100238414A1 (en) | Visual display device | |
| JP4082075B2 (ja) | 画像表示装置 | |
| JP2018205574A (ja) | 画像投影装置 | |
| JP4681825B2 (ja) | 走査型表示光学系 | |
| JP2011242580A (ja) | 投影光学装置 | |
| JP3620767B2 (ja) | 反射型走査光学系 | |
| JP2004138822A (ja) | 網膜走査型表示装置 | |
| JPH1184291A (ja) | 走査光学系 | |
| US6795223B2 (en) | Scanning optical system | |
| US20090251668A1 (en) | Scanning image projector | |
| JP4574774B2 (ja) | 映像表示装置 | |
| JP2004077549A (ja) | 走査型表示光学系、走査型画像表示装置および走査型画像表示システム | |
| JP2004070190A (ja) | タンデム型のレーザー走査装置 | |
| JP3713085B2 (ja) | 反射型走査光学系 | |
| JP3134906B2 (ja) | ビーム走査装置 | |
| US6850350B2 (en) | Optical scanner | |
| JP4372926B2 (ja) | 走査光学系 | |
| JP2000267030A (ja) | 光走査装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070319 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070319 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100315 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100331 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100525 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100721 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100816 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100901 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100917 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130924 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130924 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |