JP4565312B2 - サーボ制御装置と非常停止方法 - Google Patents
サーボ制御装置と非常停止方法 Download PDFInfo
- Publication number
- JP4565312B2 JP4565312B2 JP2003412919A JP2003412919A JP4565312B2 JP 4565312 B2 JP4565312 B2 JP 4565312B2 JP 2003412919 A JP2003412919 A JP 2003412919A JP 2003412919 A JP2003412919 A JP 2003412919A JP 4565312 B2 JP4565312 B2 JP 4565312B2
- Authority
- JP
- Japan
- Prior art keywords
- drive device
- abnormality
- motor
- driving
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Description
また、コントローラと多軸サーボ制御装置間の接続に伝送手段を用いた例として特許文献2がある。
従来例の非常停止方法について図6、図7を用いて説明する。図6は工作機械の同期駆動装置であるクランクピン研削装置の構成を示したものである。図6において左側の機械ブロックは左側チャック駆動装置、右側の機械ブロックは右側チャック駆動装置である。36R、36Lは主軸モータ、38R、38Lは 歯車、40R、40Lはエンコーダ、42R、42Lは電磁ブレーキ、48R、48Lはサーボアンプ、54はCNC装置、56はPLC装置、58R、58Lはダイナミックブレーキ機構である。工作物を固定した両側2つの油圧チャック22R、22Lを2台の主軸モータ36R、36Lの同期駆動することで実現している。従って同期がずれると2つの油圧チャック間にねじれが発生し、工作物に応力がかかり、場合によっては破損することもある。このため従来例では停電や故障などの非常時においても同期ずれを少なくなるように、工夫がされている。つまり、動作異常が発生すると、まず2つの主軸モータ36R、36Lをタイマで決められた一定時間ダイナミックブレーキ58R、58Lを動作させて減速し、その後、電磁ブレーキ42R、42Lを動作させて停止させる。
また、図9の従来例は、コンピュータとモータのモーション制御を行う複数のサーボコントローラとの間でシリアル通信を行うサーボ制御の構成を示したものである。図9で101はパソコン、102はパソコンの拡張ボードで高速シリアル通信インタフェース、103から105はサーボコントローラである。コンピュータ101とサーボコントローラ103から104を第1伝送106と第2伝送107の2本の伝送手段で接続する構成としている。つまり、第1伝送106はコンピュータ101からサーボコントローラ103〜105へ、第2伝送107はサーボコントローラ103〜105からコンピュータへ情報を伝送する。この従来例はサーボコントローラ103〜105で発生したアラーム情報を第2伝送107を通してアラーム情報や位置情報をコンピュータ101のメモリに書き込み、コンピュータ101はアラーム情報に応じた処理をして第1伝送106を介して各サーボコントローラ103〜105へ指令やアラームを発生したサーボコントローラの位置情報を伝送する。サーボコントローラ103〜105はコンピュータ101の指令に従って処理をする。
また、特許文献2の従来例では、アラーム発生時に第2伝送で位置情報をコンピュータに返し、コンピュータで処理をした後に、第1伝送を介してサーボコントローラに指令やアラーム発生サーボコントローラの位置情報を各サーボコントローラに伝送するので、時間遅れが発生し、非常停止をする場合には追従動作に遅れが発生するという問題があった。
本発明は、上記問題を解決するためになされたものであり、コントローラと駆動装置間を第1伝送手段、駆動装置間は第2伝送手段で接続し、異常を発生した駆動装置は異常情報をコントローラと異常を発生していない駆動装置に伝送した後、所定の停止方法によってモータを停止させ、異常を発生していない駆動装置は異常情報に基づき異常を発生した駆動装置の位置情報を基に所定の方法で停止させる。このように本発明は、負荷などのばらつきが生じても軸間の同期精度を高め、機械のストレスを減少できるモータ駆動装置の非常停止方法と提供することを目的とする。
請求項1に記載の発明は、機械的に結合された2軸を有する多軸の機械を駆動する多軸駆動装置で、前記2軸のうち1軸を駆動する第1モータと第1駆動装置と、前記2軸のうち他の1軸を駆動する第2モータと第2駆動装置と、前記2軸以外の第3モータから第nモータと、第3駆動装置から第n駆動装置と、第1伝送手段を介して第1サンプリング時間ごとに前記第1駆動装置から前記第n駆動装置までを制御するコントローラからなるサーボ制御装置の前記第1駆動装置または前記第2駆動装置の何れかに異常を発生した場合の非常停止方法において、前記各駆動装置に位置を制御する位置制御部と、速度を制御する速度制御部を備え、前記各駆動装置間に第2伝送手段を備え、前記駆動装置は前記第2伝送手段を介して、前記コントローラを介さずに、互いの位置、速度、トルク、異常状態の状態情報を第2サンプリング時間ごとに伝送し、異常発生を検知した異常発生駆動装置は前記状態情報を前記コントローラと異常を発生していない他の駆動装置に伝送し、前記異常発生駆動装置は異常発生側のモータを正常に駆動できる場合は予め決められた減速曲線に沿って減速し、正常に駆動できない場合はモータを電気的に切り離し、モータ端子を抵抗で短絡するダイナミックブレーキの制動手段を使用して停止させ、前記異常を発生していない駆動装置は、前記異常発生駆動装置の状態情報の位置情報に追従して動作することを特徴とするものである。
請求項2に記載の発明は、請求項1記載のサーボ制御装置の非常停止方法において、前記異常を発生していない駆動装置の減速方法は前記異常発生駆動装置の状態情報の速度情報をフィードフォワードとして使用することを特徴とするものである。
請求項3に記載の発明は、機械的に結合された2軸を有する多軸の機械を駆動する多軸駆動装置で、前記2軸のうち1軸を駆動する第1モータと第1駆動装置と、前記2軸のうち他の1軸を駆動する第2モータと第2駆動装置と、前記2軸以外の第3モータから第nモータと、第3駆動装置から第n駆動装置と、第1伝送手段を介して第1サンプリング時間ごとに前記第1駆動装置から前記第n駆動装置までを制御するコントローラからなるサーボ制御装置において、前記各駆動装置に位置を制御する位置制御部と、速度を制御する速度制御部を備え、前記各駆動装置間に第2伝送手段を備え、前記駆動装置は前記第2伝送手段を介して、前記コントローラを介さずに、互いの位置、速度、トルク、異常状態の状態情報を第2サンプリング時間ごとに伝送し、異常発生を検知した異常発生駆動装置は前記状態情報を前記コントローラと異常を発生していない他の駆動装置に伝送し、前記異常発生駆動装置は異常発生側のモータを正常に駆動できる場合は予め決められた減速曲線に沿って減速し、正常に駆動できない場合はモータを電気的に切り離し、モータ端子を抵抗で短絡するダイナミックブレーキの制動手段を使用して停止させ、前記異常を発生していない駆動装置は、前記異常発生駆動装置の状態情報の位置情報に追従して動作することを特徴とするものである。
請求項4に記載の発明は、請求項3記載のサーボ制御装置において、前記異常を発生していない駆動装置の減速方法は前記異常発生駆動装置の状態情報の速度情報をフィードフォワードとして使用することを特徴とするものである。
駆動装置に異常が発生すると異常情報はコントローラと各駆動装置に伝送され、各駆動装置は所定の動作で停止する。異常情報には、異常の内容を識別した異常信号コードを含んでおり、コントローラや異常を発生していない他の軸は、異常信号コードを読むことで異常内容を判別できる。駆動装置の異常には、モータ駆動を維持できる異常とモータ駆動を維持できない異常がある。過電流異常や過電圧異常などは、駆動装置内の部品が故障した場合やこのままモータ駆動を維持すると部品故障にいたるような異常であり、あらかじめ決められた異常検出レベルを超えると電力変換装置のパワー素子の駆動を即遮断し、異常発生信号を出力する。それに対し、過負荷警報やバッテリ電圧低下警報などの異常はモータ駆動を維持してもすぐ故障には至らないので、異常発生信号を出力するだけでパワー素子の駆動を遮断することはなくモータを正常に駆動できる。異常発生駆動装置がモータを正常に駆動できる場合は、最も精度よく停止できるように、コントローラの異常停止位置指令に基づき全軸により停止する。異常発生駆動装置がモータを正常に駆動できない場合はモータを電気的に切り離し、ユーザパラメータで設定された方法で停止する。例えばモータ端子を抵抗で短絡して制動トルクを得るダイナミックブレーキを使用することで惰走距離を最小にできる。異常を発生していない駆動装置は異常発生駆動装置がモータを正常に駆動できる場合は、コントローラの異常停止位置指令に基づき停止し、異常発生駆動装置がモータを正常に駆動できない場合は、異常発生駆動装置の状態情報の位置情報に基づいてスレーブ動作として追従動作をする。但し、異常発生駆動装置の状態情報の位置情報に基づいて追従動作をするのは、第1駆動装置と第2駆動装置だけである。図3は正常な状態のブロック図であるが、異常発生駆動装置がモータを正常に駆動できる場合にも適用でき、コントローラの位置指令どおりに停止する。このときのタイムチャートを図5に示す。
図4は異常発生駆動装置がモータを正常に駆動できない場合のブロック図を示したものである。異常を発生していない駆動装置が異常発生駆動装置の状態情報のなかの位置情報に基づいて追従動作をする。図4においてSW1は第1駆動装置の位置指令をコントローラか第2駆動装置の実際位置かを切替え、SW2は第2駆動装置の位置指令をコントローラか第1駆動装置の実際位置かを切替え、SW3は第1駆動装置の速度指令に第2駆動装置の実際速度を加えるかどうかを切替え、SW4は第2駆動装置の速度指令に第1駆動装置の実際速度を加えるかどうかを切替える。実際速度を他の駆動装置の速度指令として加えるフィードフォワード制御は追従精度を向上させる。
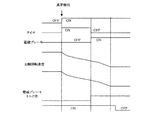
通常の場合、異常発生駆動装置はコントローラの位置指令データどおりには動作できなくなる確率が高く、電源ラインから主回路を開放し、ダイナミックブレーキをかけて停止する。このとき、異常を発生していない駆動装置を急速に減速停止をするとダイナミックブレーキのほうが減速停止よりも制動トルクが弱いので軸間に同期誤差を発生する。同期誤差の発生を抑えるために、異常を発生していない駆動装置を異常発生駆動装置の位置情報に追従して動作させ、同期誤差を少なくする。図4において正常な状態ではSW1とSW2はコントローラの位置指令を選択するので第1駆動装置と第2駆動装置はコントローラからの指令に従って同期動作を行う。ここで、例えば第1駆動装置に異常が発生すると第1駆動装置はコントローラの指令には関係なく第1モータにダイナミックブレーキをかけて停止させる。同時にSW2によりコントローラの位置指令を切り離し、第1駆動装置の実際位置を接続して、位置指令とする。さらに、SW4は閉じられ、第1駆動装置の実際速度を速度指令として加え速度フィードフォワード制御を行う。結果として、第2モータは第1モータの動作に追従して動作することになる。図6は第2駆動装置が第1駆動装置の追従動作をしているときのタイムチャートを示している。逆に第2駆動装置に異常が発生した場合も同様に第1駆動装置は第2駆動装置の動作に追従して動作する。上述の停止動作指令は上位のコントローラ1を介すことなく第1駆動装置と第2駆動装置との間で直接に伝送される。このため、上位コントローラが介在する場合に比べ高速に同期した減速停止動作ができる。
図2は実施例3の構成を示したものである。図2においてコントローラ1からの指令は第1伝送手段を通して第1駆動装置、第3駆動装置に伝送され、第2駆動装置は第1駆動装置からの指令を第2伝送手段を通して伝送される。
駆動装置に異常が発生すると異常情報は第1伝送手段と第2伝送手段を通してコントローラと各駆動装置に伝送され、各駆動装置は所定の動作で停止する。この時、異常発生駆動装置がモータを正常に駆動できる場合は、コントローラの異常停止位置指令に基づき全軸停止する。但し、第2駆動装置は第1駆動装置からの指令で停止する。異常発生駆動装置がモータを正常に駆動できない場合はモータを電気的に切り離し、モータ端子を抵抗で短絡して制動トルクを得るダイナミックブレーキにより停止する。異常を発生していない駆動装置は異常発生駆動装置がモータを正常に駆動できる場合はコントローラの異常停止位置指令に基づき停止し、異常発生駆動装置がモータを正常に駆動できない場合は、異常発生駆動装置の状態情報の位置情報に基づいて追従動作をする。ここで異常発生駆動装置の状態情報の位置情報に基づいて追従動作をするのは、第1駆動装置と第2駆動装置だけである。つまり、第1駆動装置に異常が発生した場合は、第2駆動装置は第1モータの動作に追従して動作し、第2駆動装置に異常動作が発生した場合は第1駆動装置は第2モータの動作に追従して動作する。図6は正常駆動装置が異常発生駆動装置に追従して動作するときのタイムチャートである。
本実施例では2軸のスライダが機械的に結合されている例を述べたが、3軸以上の場合でも同様である。
2〜5 第1〜第n駆動装置
6〜9 第1〜第nモータ
10〜13 第1〜第n位置検出器
14〜17 第1〜第nスライダ
18 締結部
19 第1伝送手段
20 第2伝送手段
21 第1位置制御部
22 第1速度制御部
23 第1トルク制御部
24 第1速度変換部
25 第2位置制御部
26 第2速度制御部
27 第2トルク制御部
28 第2速度変換部
Claims (4)
-
機械的に結合された2軸を有する多軸の機械を駆動する多軸駆動装置で、前記2軸のうち1軸を駆動する第1モータと第1駆動装置と、前記2軸のうち他の1軸を駆動する第2モータと第2駆動装置と、前記2軸以外の第3モータから第nモータと、第3駆動装置から第n駆動装置と、第1伝送手段を介して第1サンプリング時間ごとに前記第1駆動装置から前記第n駆動装置までを制御するコントローラからなるサーボ制御装置の前記第1駆動装置または前記第2駆動装置の何れかに異常を発生した場合の非常停止方法において、
前記各駆動装置に位置を制御する位置制御部と、速度を制御する速度制御部を備え、
前記各駆動装置間に第2伝送手段を備え、
前記駆動装置は前記第2伝送手段を介して、前記コントローラを介さずに、互いの位置、速度、トルク、異常状態の状態情報を第2サンプリング時間ごとに伝送し、
異常発生を検知した異常発生駆動装置は前記状態情報を前記コントローラと異常を発生していない他の駆動装置に伝送し、
前記異常発生駆動装置は異常発生側のモータを正常に駆動できる場合は予め決められた減速曲線に沿って減速し、正常に駆動できない場合はモータを電気的に切り離し、モータ端子を抵抗で短絡するダイナミックブレーキの制動手段を使用して停止させ、前記異常を発生していない駆動装置は、前記異常発生駆動装置の状態情報の位置情報に追従して動作することを特徴とするサーボ制御装置の非常停止方法。 - 前記異常を発生していない駆動装置の減速方法は前記異常発生駆動装置の状態情報の速度情報をフィードフォワードとして使用することを特徴とする請求項1記載のサーボ制御装置の非常停止方法。
-
機械的に結合された2軸を有する多軸の機械を駆動する多軸駆動装置で、前記2軸のうち1軸を駆動する第1モータと第1駆動装置と、前記2軸のうち他の1軸を駆動する第2モータと第2駆動装置と、前記2軸以外の第3モータから第nモータと、第3駆動装置から第n駆動装置と、第1伝送手段を介して第1サンプリング時間ごとに前記第1駆動装置から前記第n駆動装置までを制御するコントローラからなるサーボ制御装置において、
前記各駆動装置に位置を制御する位置制御部と、速度を制御する速度制御部を備え、
前記各駆動装置間に第2伝送手段を備え、
前記駆動装置は前記第2伝送手段を介して、前記コントローラを介さずに、互いの位置、速度、トルク、異常状態の状態情報を第2サンプリング時間ごとに伝送し、
異常発生を検知した異常発生駆動装置は前記状態情報を前記コントローラと異常を発生していない他の駆動装置に伝送し、
前記異常発生駆動装置は異常発生側のモータを正常に駆動できる場合は予め決められた減速曲線に沿って減速し、正常に駆動できない場合はモータを電気的に切り離し、モータ端子を抵抗で短絡するダイナミックブレーキの制動手段を使用して停止させ、前記異常を発生していない駆動装置は、前記異常発生駆動装置の状態情報の位置情報に追従して動作することを特徴とするサーボ制御装置。 - 前記異常を発生していない駆動装置の減速方法は前記異常発生駆動装置の状態情報の速度情報をフィードフォワードとして使用することを特徴とする請求項3記載のサーボ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003412919A JP4565312B2 (ja) | 2003-12-11 | 2003-12-11 | サーボ制御装置と非常停止方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003412919A JP4565312B2 (ja) | 2003-12-11 | 2003-12-11 | サーボ制御装置と非常停止方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005176493A JP2005176493A (ja) | 2005-06-30 |
| JP2005176493A5 JP2005176493A5 (ja) | 2006-11-30 |
| JP4565312B2 true JP4565312B2 (ja) | 2010-10-20 |
Family
ID=34733197
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003412919A Expired - Fee Related JP4565312B2 (ja) | 2003-12-11 | 2003-12-11 | サーボ制御装置と非常停止方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4565312B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4893075B2 (ja) * | 2006-04-12 | 2012-03-07 | 株式会社安川電機 | 同期制御システム |
| JP5092267B2 (ja) * | 2006-04-17 | 2012-12-05 | 株式会社安川電機 | モータ駆動装置およびその非常停止方法 |
| JP5339729B2 (ja) * | 2008-01-08 | 2013-11-13 | キヤノン株式会社 | ステージ装置及びそれを有する露光装置 |
| JP4817084B2 (ja) | 2010-03-30 | 2011-11-16 | 株式会社安川電機 | モータ駆動システム及びモータ制御装置 |
| JP5192571B2 (ja) * | 2011-07-26 | 2013-05-08 | ファナック株式会社 | 一つの被駆動体を二つの電動機で駆動させる制御装置 |
| JP6143989B1 (ja) | 2016-08-24 | 2017-06-07 | 三菱電機株式会社 | モータ制御装置 |
| JP6568039B2 (ja) | 2016-10-13 | 2019-08-28 | ファナック株式会社 | 複数軸を有する工作機械におけるモータ制御装置 |
| JP2022139925A (ja) * | 2021-03-12 | 2022-09-26 | オムロン株式会社 | モータ制御システム及びモータ制御装置 |
Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62181684A (ja) * | 1986-02-05 | 1987-08-10 | Mitsubishi Electric Corp | 同期式acサ−ボモ−タ−のダイナミツクブレ−キ装置 |
| JPH01228752A (ja) * | 1988-03-10 | 1989-09-12 | Fanuc Ltd | 主軸同期方式 |
| JPH0284090A (ja) * | 1988-09-20 | 1990-03-26 | Hitachi Kiden Kogyo Ltd | クレーンの減速異常検出装置 |
| JPH03142131A (ja) * | 1989-10-30 | 1991-06-17 | Mitsubishi Heavy Ind Ltd | 同期送り装置 |
| JPH0490011A (ja) * | 1990-03-02 | 1992-03-24 | S G:Kk | サーボ制御システム |
| JPH06143089A (ja) * | 1992-11-10 | 1994-05-24 | Tsudakoma Corp | 工作機械のアタッチメントの同期運転方法 |
| JPH0866073A (ja) * | 1994-08-12 | 1996-03-08 | Toshiba Corp | サーボドライブ方法とサーボドライブ装置とサーボドライブシステム |
| JPH10326107A (ja) * | 1997-03-25 | 1998-12-08 | Mitsubishi Electric Corp | サーボ制御方法およびサーボ制御システム |
| JPH11107621A (ja) * | 1997-09-30 | 1999-04-20 | Ichikoh Ind Ltd | 跳ね上げ式自動開閉門扉 |
| JPH11300565A (ja) * | 1998-04-22 | 1999-11-02 | Toyoda Mach Works Ltd | 同期駆動装置の制動方法及び同期駆動装置 |
| JPH11341885A (ja) * | 1998-05-25 | 1999-12-10 | Matsushita Electric Ind Co Ltd | モータ制御装置 |
| JP2003169497A (ja) * | 2001-12-03 | 2003-06-13 | Mitsubishi Heavy Ind Ltd | サーボドライブシステム、射出成型機、サーボモータ制御方法及び射出成型機の動作方法 |
| JP2005117832A (ja) * | 2003-10-09 | 2005-04-28 | Yaskawa Electric Corp | 電動機制御装置の非常停止方法 |
-
2003
- 2003-12-11 JP JP2003412919A patent/JP4565312B2/ja not_active Expired - Fee Related
Patent Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62181684A (ja) * | 1986-02-05 | 1987-08-10 | Mitsubishi Electric Corp | 同期式acサ−ボモ−タ−のダイナミツクブレ−キ装置 |
| JPH01228752A (ja) * | 1988-03-10 | 1989-09-12 | Fanuc Ltd | 主軸同期方式 |
| JPH0284090A (ja) * | 1988-09-20 | 1990-03-26 | Hitachi Kiden Kogyo Ltd | クレーンの減速異常検出装置 |
| JPH03142131A (ja) * | 1989-10-30 | 1991-06-17 | Mitsubishi Heavy Ind Ltd | 同期送り装置 |
| JPH0490011A (ja) * | 1990-03-02 | 1992-03-24 | S G:Kk | サーボ制御システム |
| JPH06143089A (ja) * | 1992-11-10 | 1994-05-24 | Tsudakoma Corp | 工作機械のアタッチメントの同期運転方法 |
| JPH0866073A (ja) * | 1994-08-12 | 1996-03-08 | Toshiba Corp | サーボドライブ方法とサーボドライブ装置とサーボドライブシステム |
| JPH10326107A (ja) * | 1997-03-25 | 1998-12-08 | Mitsubishi Electric Corp | サーボ制御方法およびサーボ制御システム |
| JPH11107621A (ja) * | 1997-09-30 | 1999-04-20 | Ichikoh Ind Ltd | 跳ね上げ式自動開閉門扉 |
| JPH11300565A (ja) * | 1998-04-22 | 1999-11-02 | Toyoda Mach Works Ltd | 同期駆動装置の制動方法及び同期駆動装置 |
| JPH11341885A (ja) * | 1998-05-25 | 1999-12-10 | Matsushita Electric Ind Co Ltd | モータ制御装置 |
| JP2003169497A (ja) * | 2001-12-03 | 2003-06-13 | Mitsubishi Heavy Ind Ltd | サーボドライブシステム、射出成型機、サーボモータ制御方法及び射出成型機の動作方法 |
| JP2005117832A (ja) * | 2003-10-09 | 2005-04-28 | Yaskawa Electric Corp | 電動機制御装置の非常停止方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005176493A (ja) | 2005-06-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102208888B (zh) | 电动机驱动系统、电动机控制器和安全功能扩展器 | |
| US8531149B2 (en) | Control device for machine tool | |
| JP4096481B2 (ja) | サーボ制御装置 | |
| US9409295B2 (en) | Method for controlling a robot | |
| JP5509947B2 (ja) | 産業用ロボット | |
| JPS5981094A (ja) | 自動機械 | |
| JP4565312B2 (ja) | サーボ制御装置と非常停止方法 | |
| CN104076737B (zh) | 使两轴相互同步的同步控制装置 | |
| JP5092267B2 (ja) | モータ駆動装置およびその非常停止方法 | |
| JP4025999B2 (ja) | 自動機械の制御装置 | |
| EP0209604B1 (en) | Interface system for a servo controller | |
| JP2005176493A5 (ja) | ||
| US10012974B2 (en) | Motor control system and motor control method which protect tool and workpiece at time of power outage | |
| JP4604447B2 (ja) | 数値制御装置及び数値制御装置の軸制御方法 | |
| CN112147507A (zh) | 一种基于闭环控制的电机抱闸状态检测方法及系统 | |
| JPH10143216A (ja) | 可動ユニットの衝突検出装置 | |
| JP4385404B2 (ja) | モータ駆動装置、およびモータ駆動装置の非常停止方法 | |
| JP4893075B2 (ja) | 同期制御システム | |
| JPS61203883A (ja) | サ−ボモ−タ制御方式 | |
| US20190386594A1 (en) | Motor control apparatus driving one main axis switchingly by two motors | |
| JPH10277887A (ja) | 位置検出器異常時の電動機制御方法 | |
| JP5019175B2 (ja) | モータ制御装置 | |
| US11086300B2 (en) | Control method, control device and program recording medium | |
| JPH03178752A (ja) | 工具負荷監視制御方法 | |
| US20230259093A1 (en) | Drive system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061013 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061013 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100128 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100324 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100708 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100721 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130813 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140813 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |