JP4535193B2 - 状態把握装置およびこの状態把握装置を備えた開閉制御装置 - Google Patents
状態把握装置およびこの状態把握装置を備えた開閉制御装置 Download PDFInfo
- Publication number
- JP4535193B2 JP4535193B2 JP2008506079A JP2008506079A JP4535193B2 JP 4535193 B2 JP4535193 B2 JP 4535193B2 JP 2008506079 A JP2008506079 A JP 2008506079A JP 2008506079 A JP2008506079 A JP 2008506079A JP 4535193 B2 JP4535193 B2 JP 4535193B2
- Authority
- JP
- Japan
- Prior art keywords
- waveform
- state
- magnetic flux
- mover
- current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000004907 flux Effects 0.000 claims description 135
- 230000008859 change Effects 0.000 claims description 78
- 238000004364 calculation method Methods 0.000 claims description 44
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical group [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 claims description 20
- 238000012937 correction Methods 0.000 claims description 14
- 230000002123 temporal effect Effects 0.000 claims description 5
- 238000000034 method Methods 0.000 description 26
- BGPVFRJUHWVFKM-UHFFFAOYSA-N N1=C2C=CC=CC2=[N+]([O-])C1(CC1)CCC21N=C1C=CC=CC1=[N+]2[O-] Chemical compound N1=C2C=CC=CC2=[N+]([O-])C1(CC1)CCC21N=C1C=CC=CC1=[N+]2[O-] BGPVFRJUHWVFKM-UHFFFAOYSA-N 0.000 description 22
- 238000010586 diagram Methods 0.000 description 16
- 230000007423 decrease Effects 0.000 description 12
- 230000007246 mechanism Effects 0.000 description 12
- 230000005540 biological transmission Effects 0.000 description 10
- 238000012423 maintenance Methods 0.000 description 10
- 239000003990 capacitor Substances 0.000 description 7
- 238000006243 chemical reaction Methods 0.000 description 7
- 238000005070 sampling Methods 0.000 description 7
- 230000005856 abnormality Effects 0.000 description 6
- 230000006870 function Effects 0.000 description 6
- 230000007257 malfunction Effects 0.000 description 6
- 230000002159 abnormal effect Effects 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 230000035945 sensitivity Effects 0.000 description 5
- 230000008569 process Effects 0.000 description 4
- 230000003068 static effect Effects 0.000 description 4
- 238000007599 discharging Methods 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 229920006395 saturated elastomer Polymers 0.000 description 3
- 230000003247 decreasing effect Effects 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000005553 drilling Methods 0.000 description 2
- 238000003780 insertion Methods 0.000 description 2
- 230000037431 insertion Effects 0.000 description 2
- 229910052742 iron Inorganic materials 0.000 description 2
- 230000005415 magnetization Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000000149 penetrating effect Effects 0.000 description 2
- 238000005452 bending Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000005347 demagnetization Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000012887 quadratic function Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images

















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F7/00—Magnets
- H01F7/06—Electromagnets; Actuators including electromagnets
- H01F7/08—Electromagnets; Actuators including electromagnets with armatures
- H01F7/18—Circuit arrangements for obtaining desired operating characteristics, e.g. for slow operation, for sequential energisation of windings, for high-speed energisation of windings
- H01F7/1844—Monitoring or fail-safe circuits
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/50—Testing of electric apparatus, lines, cables or components for short-circuits, continuity, leakage current or incorrect line connections
- G01R31/72—Testing of electric windings
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H11/00—Apparatus or processes specially adapted for the manufacture of electric switches
- H01H11/0062—Testing or measuring non-electrical properties of switches, e.g. contact velocity
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H33/00—High-tension or heavy-current switches with arc-extinguishing or arc-preventing means
- H01H33/60—Switches wherein the means for extinguishing or preventing the arc do not include separate means for obtaining or increasing flow of arc-extinguishing fluid
- H01H33/66—Vacuum switches
- H01H33/666—Operating arrangements
- H01H33/6662—Operating arrangements using bistable electromagnetic actuators, e.g. linear polarised electromagnetic actuators
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H47/00—Circuit arrangements not adapted to a particular application of the relay and designed to obtain desired operating characteristics or to provide energising current
- H01H47/22—Circuit arrangements not adapted to a particular application of the relay and designed to obtain desired operating characteristics or to provide energising current for supplying energising current for relay coil
- H01H47/32—Energising current supplied by semiconductor device
Landscapes
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Linear Motors (AREA)
- Arc-Extinguishing Devices That Are Switches (AREA)
- Driving Mechanisms And Operating Circuits Of Arc-Extinguishing High-Tension Switches (AREA)
- Measurement Of Resistance Or Impedance (AREA)
Description
図1および図2はこの発明の実施の形態1に係る電磁操作機構(電磁アクチュエータ)を用いた電力開閉器を示す概略構成図であり、通常は3相ある電力系統の1相分について示したものである。また、図1は電力系統を開極した状態であり、図2は閉極した状態を示す。
電力系統の開閉は真空バルブ30内部の可動接点(被操作機器)34が動くことによって行われる。可動接点34の駆動は、電磁アクチュエータ1によって行われる。また、可動接点34と、電磁アクチュエータ1を接続する軸上には、電力系統と電磁アクチュエータ1を絶縁するための絶縁ロッド31、および可動接点34と固定接点33との間に接触圧力を与えるためのワイプばね32が配置される。ワイプばね32は、押し縮めた状態で組み立てられており、一定の長さ以上は伸びないように機械的に固定されている。電磁アクチュエータ1は、外部からの開閉指令信号によって、電源回路20から電磁アクチュエータ1に通電を行うことによって動作する。
また、閉極状態から開極状態に駆動される場合に、まず、可動子3が移動を開始し、これに伴って、ワイプばね32が伸びる。この間、可動接点34は固定接点33に接触したまま停止している。可動子3が(L−K)だけ移動した時点で、ワイプばね32が最大長まで伸び、この時点から可動子3と可動接点34が連結して移動するようになる。この時点をワイプ完了点と呼ぶ。
電磁アクチュエータ1は、ヨーク4、ヨーク4に対して移動可能に構成された可動子(可動鉄心)3、駆動用電源回路20により励磁される閉極側コイル2aおよび開極側コイル2b、可動子3の外周部に設置され、開極状態または閉極状態を保持する永久磁石5、可動軸9、並びにヨーク4内部に挿入された磁束センサ6a,6bから構成される。可動子3と可動軸9とは固着されており、可動子3はヨーク4の内部で可動軸9の軸方向にほぼ直線的に動くように構成されている。図3では、可動子3はヨーク4の真空バルブ側(上側)の端面に接触している。
なお、ここでは、一旦コンデンサに充電した電荷をコイル放電する方法を示したが、外部電源から供給される電流を直接コイル2aまたはコイル2bに通電する方式としても良い。
磁束センサ6a,6bは、ホール素子またはホール素子に校正機能を組み込んだホールICであり、波形取得手段21より電力が供給されると共に、磁束センサ6a,6bの位置で計測された磁束を電圧または電流に変換して出力する。
なお、A/D変換を終了するタイミングは、電源回路20が放電を完了するタイミングに厳密に一致される必要なく、予め波形取得手段21の内部で決めておけば良い。
さらに、判定結果に基づいて、例えば、開閉装置盤面、または盤内に設置された状態表示ランプの点灯を行う。また、状態判定結果を接点信号や、有線/無線の通信手段によって、受配電設備の監視システムに引き渡しても良い。
図5(a)に示すように、永久磁石5の作る磁束によって、可動子3にはヨーク4との接触状態を保持する力(保持力)が働いている。この状態において、開極側コイル2bに、永久磁石5が発生する磁束をキャンセルする方向に電流を通電すると、電流が十分に大きければ、永久磁石5による保持力は消滅し、コイル2bの作る磁束によって可動子3は下方向(開極方向)に向かって移動し、ヨーク4の下側の面(開極側端面)に接触する。この状態で、永久磁石5による磁束よって、可動子3には開極側端面との接触を保持するように保持力が発生する(図5(b))。可動子3が開極側端面に接触した状態において、閉極側コイル2aを通電すると、同様の動作によって、可動子3を閉極側へ移動させ、その位置で保持させることができる(図5(a))。
コイル2bが作る磁束が流れる経路は、ヨーク4と可動子3の閉極側端面(図中の上端面)との接触面から、可動子3の開極側端面(図中の下端面)を通って、ヨーク4に流れる経路(φc〜φc_1)と、ヨーク4から永久磁石5を通過して可動子3の一部を通ってヨーク4に戻る経路(φc〜φc_2)との2つの経路がある。
ヨーク4と可動子3の閉極側端面との接触面において、永久磁石5が作る磁束φPMの流れる向きとコイル2bが作る磁束φc_1の流れる向きとは逆向きである。
φc、φc_1、φc_2の間には、
φc=φc_1+φc_2
の関係がある。
また、(φc〜φc_2)の経路では永久磁石5と可動子3との間に空気ギャップがあり、永久磁石5自体も空気ギャップとして働くため、
φc_1>φc_2
の関係がある。
コイル2bが作る磁束成分で、磁束センサ6aで測定される成分はφc_1であり、磁束センサ6bが測定する成分はφcである。
コイル2bに通電を行っても、可動子3が動き出す前の状態では、磁束φc、φc_1は、コイル2bへの通電電流Iに比例する。
これに対して、コイル2bが作る磁束に関しては、センサ6aを通過するφc_1では、可動子3の開極側端面とヨーク5との間、閉極側端面とヨーク5との間には常にギャップがあり、開極側、閉極側のギャップの和は、可動子3が移動しても変化しないため、φc_1は可動子3の位置による変化は小さく、コイル2bに流れる電流値に比例する大きさとなる。
また、φcの変動の傾向は、可動子3の移動とともにヨーク4と可動子3の閉極側端面間とのギャップが狭くなるためにφcが増加する効果と、コイル2bの通電電流に比例してφcが変化する効果を重ね合わせたものとなる。ただし、φcからφc_2へ流れる磁束の経路には、常に永久磁石5が空気ギャップとして存在するため、可動子3の位置変動によるφcの変化の程度は、φPM_1の変化の程度に比べると小さいものになる。
また、図5(e)は、可動子3が移動を完了した直後の状態であるが、この時点では、まだコイル2bには通電が行われており、コイル2bの作る磁束φcの向きと永久磁石5が作る磁束φPMの向きとは同方向であるため、磁気飽和が発生する場合がある。
φ6a(t)=φPM_6a(x(t))+φc_6a(x(t),I(t)) (1)
と書くことができる。
ここで、可動子3の位置x、コイル電流Iは、それぞれ時間tに依存するため、x(t)、I(t)と表記している。
φc_6a(x,I)=Φc_6a(x)・k1・I (2)
と書き換えることができる。
ここで、k1は比例係数である。また、Φc_6a(x)は、φc_6aの、xに対する関係を示した関数である。
Φc_6a(x)=k2・φPM_6a(x) (3)
とできる。ここで、k2は比例係数である。
これから、

また、上述したように、Φc_6aのxに対する変化が、φPM_6aのxに対する変化に比べて十分小さい場合には、Φc_6aはxに対してほぼ一定であると近似することができ、
φ6a(t)=φPM_6a(x)+k3・I (6)
とするができる。ここでk3は比例定数である。
この結果、式(5)は
x(t)=φPM_6a -1(φ6a(t)−k3・I(t)) (7)
となる。
例えば、φPM_6a(x)が1次関数であれば、
x(t)=k4・(φ6a(t)−k3・I(t))+k5 (8)
とすることができる。
ここで、k4,k5は定数である。
波形bは、可動子3の動き出し(時刻T2)から全移動距離の1/3程度の所までは単調に出力が変化しているが、1/3以降では出力がほぼフラットになっている。これは、可動子3が移動するに伴って、永久磁石5の作る磁束が開極側を流れるようになり、閉極側にはほとんど流れなくなってしまったためである。
一方、波形cは、全工程に渡って単調に出力が変化している。これは、アクチュエータが図7(a)のA部とB部において非対称な形状になっているために、可動子3が開極側から閉極側に移動しても(図7(a)→図7(b))、A部の磁路の磁気抵抗が大きくなっているために、B部にも磁束φPM_1が流れ続けているためである。
ここで、係数α,βは、可動子3が動き出すまえに波形e、および波形fにそれぞれフラットな領域sができるという条件で決定している。これは、演算した結果の波形e、fは、式(1)、式(2)で示したように、可動子3の位置xと時間tの関係を示すものでなければならないので、可動子3が移動を開始する前には、波形e,fの時間変化は無いはずであるという理由から決定した条件である。ここで、フラットになるという条件は、具体的には、領域sの範囲で、波形の時間変化が極小になるようにα,βを決めることである。
また、領域sの決定は、アクチュエータに固有の領域として予め決めておく方法、電流のピーク位置から一定時間前の時間領域として定義する方式、磁束センサの磁束変化波形から推定する方式が考えられる。
まず第1の手順として、フラット領域sを決定する(図4のステップS8〜ステップS9)。
図8において、演算波形e,fでは、放電開始(地点T0)直後に急激に値が変動しており、その後フラットな領域sができている。アクチュエータのヨーク5は、静止状態では永久磁石5の作る磁束によって磁気的に飽和している。放電が開始されると、コイルの作る磁束は、永久磁石5の作る磁束を打ち消す方向に発生する。放電電流が上昇して、ヨーク5内部の磁気的な飽和状態が解消された時点から、可動子3が動き始める時点までの間は、コイル電流値Iと磁束センサの測定値Bに、I∝Bの関係が成り立つ。上記のフラットな領域sは、磁気飽和が解消される時点から可動子3が動き出すまでの時間と考えることができる。磁気飽和が解消される時点は、アクチュエータ1の構造とコイル電流値とによってほぼ決まるため、同じ構成の開閉装置ではほぼ同じ時点となる。従って、予め磁気飽和が解消される時点を計測し、T1としてメモリ22に保存しておけば、フラット領域sの始めの時点を決めることができる。また、前述のように、飽和が解消する時点はコイル電流値によって決まるため、図6において、コイル電流値Iが予め決められた一定値Ixに等しくなった時点をフラット領域sの始めの時点T1としても良い。
なお、電流ピーク時点の推定方法としては、電流値が最大値となった時点の近傍の変化波形データに二次関数近似を行って、近似関数が極値を取る時点をピーク時点とする。ただし、電流センサの出力のノイズ成分が十分小さければ、電流値が最大となる時点をそのままピーク時点としても良い。
また、電流変化波形データに平滑化処理を行った後のデータにおいて最大値となる時点をピーク時点としても良い。
また、アクチュエータやコンデンサ容量の構成によっては、第1の電流ピークの後に、第2の電流ピークが現れる場合があり、第2の電流ピークが第1の電流ピークよりも大きい場合がある。この場合は、第1の電流ピークを電流ピーク時点とする。
ei=bi−α・Ii (13)
fi=−ci−β・Ii (14)
ここで、bi、ciは変化波形データのi番目のサンプリング・データを表し、1≦i≦Nである。
これらの波形に関しても、上記と同様に、可動子3の動き出しの前に波形がフラットになるという条件によって、電流変化波形の演算係数γ,δを決定して、演算波形g,hを以下のように算出する。
gi=bi−γ・Ii (15)
hi=−ci−δ・Ii (16)
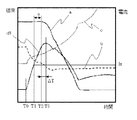
まず、開極動作時(図4のステップS12〜ステップS16)について述べる。第1の手順では、演算波形eを参照し、この波形データから図11に示した3つの特徴点P4,P5,P6を探索して、T4,T5,T6を算出する。特徴点P4は、フラット領域sの後に、値が急激に下がり始める点であり、可動子3の動作開始時点T4(T2に一致する時点)を表す点である。特徴点P5は、T4以降に単調に減少していた波形が、一時的に増加に転じる点であり、ワイプばね完了点T5に一致する時点である。特徴点P6は、T5以降に減少に転じた波形が、再び増加に転じる点であり、可動子3の駆動完了点T6に一致する。
L=ε・(ft=T4−ft=T6) (17)
とすることができる。
この補正係数εを用いて、波形fをさらに修正し、
Fi=ε・(−ci−β・Ii) (19)
として、新しく演算波形Fを求める。
また、この補正係数t,uを用いて、新たに演算波形G,Hを
Gi=t・(bi−γ・Ii) (23)
Hi=u・(−ci−δ・Ii) (24)
として求め、新たな演算波形G,Hより、特定の時刻や特定の波形Fの値を基準点として閉極時の速度の算出を行うことができる。
得られた速度と、予め決められた速度の下限値、上限値(一般に開極時の値とは異なる値)を比較し、速度が下限値よりも下回った場合や、上限値を超えた場合は、速度異常と判定し、外部装置に異常判定信号を出力する。
閉極動作時の可動子3の駆動速度が低下すると、閉極時に発生するアーク電流によって電極が溶着し、その後の開極動作が行えなくなる可能性がある。この場合にも同様に緊急のメンテナンスが必要となる。
また、開極動作、閉極動作のどちらの場合においても、駆動速度の低下は、駆動機構上の機械的な摩擦力の上昇や、駆動電流量の不足等に起因しており、なんらかの機器の異常の兆候と考えることができる。これらの異常は、駆動機構の動作不良に繋がる可能性が高いため、同様にメンテナンスの実施が必要となる。
また、可動子3の駆動速度が所定の値よりも速すぎる場合には、駆動完了時の機械的な衝撃が大きくなり、開閉装置の耐用年数を低下させる要因となる。したがって、速度超過を検出した場合には、定期メンテナンスの繰上げ実施や、装置耐用年数の見直しなどの対処を行うことができる。
Ii→p・Ii
bi→q・bi
ci→r・ci
となった場合には、波形Fは、
Fi=ε・(−rci−β・p・Ii) (25)
と変化する。これは
Fi=ε1・(−ci−β1・Ii) (26)
と書き直すことができるが、β1とε1とは、可動子3の駆動前にフラット領域ができるという条件、および可動子3の駆動距離がLであるという2つの条件のみで決定されているため、センサの感度が変動しても、係数βおよび補正係数εを求める時点でその変動分はこれらの係数に吸収されるため、常に同じ結果が得られる。波形e,g,h,G,Hに関する係数α,γ,δおよび補正係数t,uに関しても、これらの係数を求める時点で、その変動分はこれらの係数に吸収されるため、常に同じ結果が得られる。
したがって、本実施の形態の状態把握装置を用いることにより、電流センサや磁束センサの初期の校正試験が不要になると共に、電流センサおよび磁束センサの感度の経時的な変動に対しても影響を受けることがない。
したがって、安価なセンサを用いても精度の良い判定を行うことが可能となる。
したがって、ワイプ完了点など、特定の基準点での速度を計測する場合においては、その基準点における速度補正係数zを用いることにより正確な速度に変換することができる。
なお、速度の正常範囲の定義を測定値を基準にして決めておけば、速度補正係数の導入は不要である。
全領域に渡って正確な速度の算出が必要な場合は、波形Fに応じた速度補正係数が必要となる。具体的には、磁束センサ出力bと可動子3の位置xとの間に、
x=Y(b) (27)
という関係式、または、近似的な関係式がある場合、
xとbとの近似式を作成することが困難である場合には、xとbとの相関関係から離散的な速度補正係数データyjを作成して、データベースとしてメモリ22内に保存し、速度算出時にメモリ内の上記データベースを用いる方法を取ることもできる。
動作開始点を用いる場合、速度を用いる場合の手法と同様に、演算波形e,f,g,hを導出し、各波形の動作開始点を算出し、この時点での電流値が、予め決められた下限値を下回った場合や、上限値を超えた場合に、異常判定とし、外部の異常判定出力を行う。
可動子3の動作開始時点は、可動子3の保持力とコイルによる電磁力が釣り合った点である。したがって、動作開始点の電流値より、可動子3の保持力を知ることができる。
保持力低下の兆候を検知して、駆動機構のメンテナンスを実施することにより、開閉装置の誤動作を未然に防ぐことが可能となる。
また、動作開始点での電流値の上昇は、可動子3の保持力の上昇を表すが、経時的な保持力の上昇は、静止摩擦力の上昇と考えることができる。静止摩擦力の増大は、アクチュエータの動作不良を引き起こす原因となるため、静止摩擦力の基準値からの増大の兆候を判定することより、障害が発生する前にメンテナンスを実施し、開閉装置の動作不良の発生を防ぐことが可能になる。
また、複数の演算波形を用い、開極時または閉極時の可動子の速度、あるいは動作開始点での電流値を求め、得られた速度、あるいは動作開始点での電流値を基に開閉装置の状態を把握するようにしても良い。
例えば、式(4)で示した、
φ6a(t)=φPM_6a(x)・(1+k1・k2・I)
や、式(1),(2)から求められる関係式、
φ6a(t)=φPM_6a(x)+Φc_6a(x)・k1・I (30)
に基づいて、演算式を作成することができる。
図13は、本発明の実施の形態2に係る電磁アクチュエータを示す構成図(閉極状態)である。磁束センサ6a,6bは、ヨーク4の内面側に溝加工を施し、この溝加工部分に組み込まれている。
図3(b)に示す実施の形態1の構成に比べ、ヨーク4の穴加工の必要が無くなるため、安価に製造を行うことができる。
図14は、本発明の実施の形態3に係る電磁アクチュエータを示す構成図(閉極状態)である。磁束センサ6a,6bは、ヨーク4の内面側に張り付ける形で固定されている。
ヨーク4の角部分などの磁束が飽和しやすい部分に貼り付けることによって、ヨーク4内部での磁束測定に準じた測定値を得ることができる。
これによって、ヨーク4の穴加工を行う必要が無くなり、安価に製造を行うことができる。
図15は、本発明の実施の形態4に係る電磁アクチュエータを示す構成図(閉極状態)である。サーチコイル10a,10bが、それぞれコイル2a,2bと重なる形で巻かれており、サーチコイル10a,10bを貫通する磁束変化率に比例した出力信号が得られる構成とする。
この出力信号を積分することによって、サーチコイル10a,10bを貫通する磁束を求めることができ、ヨーク4内部に磁束センサ6a,6bを挿入した場合に準じた出力を得ることができる。
図16は、本発明の実施の形態6に係る電磁アクチュエータを示す構成図(閉極状態)である。サーチコイル11a,11bは、ヨーク4に巻きつけられており、サーチコイル11a,11bを貫通する磁束の変化率に比例した出力信号が得られる構成とする。
この信号を積分することによって、サーチコイル11a,11bを貫通する磁束を求めることができ、ヨーク4内部に磁束センサ6a,6bを挿入した場合に準じた出力を得ることができる。
上記各実施の形態では、磁束変化波形と電流変化波形とを演算することにより機器状態を判定したが、磁束変化波形から直接、機器状態を判定することも可能である。図17において、磁束センサ出力波形bのtおよびu、磁束センサ出力波形cのvのように、波形の曲率が特徴的に変化している点は、可動子の動作開始点、ワイプ完了点、動作完了点に一致している。
したがって、磁束センサの信号のみを検出することによっても、可動子3の動作の特徴的な時点を簡便に知ることができるため、これらの情報から開閉装置の状態を推定することが可能となる。
具体的には、磁束センサ出力波形b,cの曲率が特徴的に変化している時点を特徴点として求め、各特徴点の時間間隔が標準的な値から変動しているかどうかによって、開閉装置の状態を推定することができる。
図18は本発明の実施の形態7による開閉制御装置を示すブロック構成図である。開閉制御装置40は、波形取得手段(AD変換器)21、記憶手段(メモリ)22、波形演算手段23、状態判定手段24、状態情報表示手段41、状態情報送信手段42、開閉指令送信手段43、開閉指令制御手段44、開閉指令入力手段45、およびトリップ信号入力手段46を有している。
このような開閉制御を行うことにより、開閉装置の動作不良による事故の発生を未然に防止することが可能となる。
また、重故障状態にある開閉装置に対してトリップ信号を受信した場合には、開閉制御装置44において、より上位の開閉装置にトリップ信号、または開指令を送信する制御を行うことによって、事故の拡大を防止することができる。
Claims (7)
- 固定鉄心と、この固定鉄心に対して移動可能に構成された可動鉄心と、駆動用電源により励磁され、上記可動鉄心を移動させる電磁コイルと、可動鉄心の外周部に設置された永久磁石とを備えた電磁操作装置に設けられ、上記電磁操作装置の状態を把握する状態把握装置において、上記電磁コイルに流れる電流を測定する電流測定手段と、上記固定鉄心内部の磁束を測定する磁束測定手段と、上記電流測定手段からの出力信号の時間的変化を表す電流変化波形と上記磁束測定手段からの出力信号の時間的変化を表す磁束変化波形とを演算して演算波形を作成する演算手段と、上記演算波形の特徴点を求め、この特徴点の情報に基づき上記電磁操作装置の状態を判定する状態判定手段とを備えたことを特徴とする状態把握装置。
- 演算手段は、磁束変化波形と電流変化波形とを演算係数を介して線形結合させた演算式を用いて演算波形を作成することを特徴する請求項1記載の状態把握装置。
- 演算手段は、可動鉄心の動作開始前に、演算波形がフラットな領域を持つことを条件として演算係数を求め、演算式を決定することを特徴する請求項2記載の状態把握装置。
- 状態判定手段は、演算波形の特徴点の情報を用いて可動鉄心の駆動速度の計算を行い、上記駆動速度の値を基に電磁操作装置の状態を判定することを特徴する請求項1〜3のいずれかに記載の状態把握装置。
- 状態判定手段は、永久磁石が作る磁束と可動鉄心の位置と間に非線形な相関関係がある場合、上記相関関係に基づいて速度補正関数を求め、この速度補正関数により特徴点における駆動速度を補正することを特徴とする請求項4記載の状態把握装置。
- 状態判定手段は、演算波形の特徴点より可動鉄心の動作開始点を求め、この動作開始点での電流値を基に電磁操作装置の状態を判定することを特徴する請求項1〜5のいずれかに記載の状態把握装置。
- 請求項1〜6のいずれかに記載の状態把握装置により得られた電磁操作装置の状態に基づき、故障の程度を判定し、上記故障の程度に応じた表示を行うとともに、重故障発生時の開閉操作を制御することを特徴とする開閉制御装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2006/305362 WO2007108063A1 (ja) | 2006-03-17 | 2006-03-17 | 状態把握装置およびこの状態把握装置を備えた開閉制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2007108063A1 JPWO2007108063A1 (ja) | 2009-07-30 |
| JP4535193B2 true JP4535193B2 (ja) | 2010-09-01 |
Family
ID=38522104
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008506079A Expired - Fee Related JP4535193B2 (ja) | 2006-03-17 | 2006-03-17 | 状態把握装置およびこの状態把握装置を備えた開閉制御装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US7739058B2 (ja) |
| EP (1) | EP1998351B1 (ja) |
| JP (1) | JP4535193B2 (ja) |
| CN (1) | CN101375359B (ja) |
| HK (1) | HK1127528A1 (ja) |
| TW (1) | TW200737260A (ja) |
| WO (1) | WO2007108063A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220128170A1 (en) * | 2020-10-20 | 2022-04-28 | Robert Bosch Gmbh | Method for determining a switching point of a solenoid valve |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8040210B2 (en) * | 2006-09-28 | 2011-10-18 | Mitsubishi Electric Corporation | Electromagnetically operated switching device |
| JP4934065B2 (ja) * | 2008-01-23 | 2012-05-16 | 三菱電機株式会社 | 電磁操作式開閉装置 |
| CN102428417B (zh) * | 2009-03-16 | 2014-03-12 | 伊顿公司 | 电气开关设备 |
| CN101509961B (zh) * | 2009-03-23 | 2011-08-17 | 哈尔滨工业大学 | 条形永磁铁截面磁通测量装置及其测量方法 |
| KR101142200B1 (ko) | 2010-10-15 | 2012-05-07 | 엘에스산전 주식회사 | 전자 개폐장치 |
| JP5618781B2 (ja) * | 2010-11-25 | 2014-11-05 | 三菱電機株式会社 | 開閉装置 |
| EP2521154B1 (en) | 2011-05-02 | 2016-06-29 | ABB Technology AG | An electromagnetically actuated switching device and a method for controlling the switching operations of said switching device. |
| FR2975774B1 (fr) * | 2011-05-25 | 2014-01-17 | Eurocopter France | Procede de determination de l'effort statique developpe par une servocommande |
| US20130043111A1 (en) * | 2011-08-15 | 2013-02-21 | Honeywell International Inc. | Circuit breaker position sensing and health monitoring system |
| DE102011081921A1 (de) * | 2011-08-31 | 2013-02-28 | Siemens Aktiengesellschaft | Magnetaktor und Verfahren zu dessen Einsatz an elektrischen Schaltanlagen |
| DE202011109470U1 (de) * | 2011-12-22 | 2013-03-25 | Maschinenfabrik Reinhausen Gmbh | Antriebseinheit für Stufenschalter |
| US9183996B2 (en) | 2012-06-27 | 2015-11-10 | Abb Technology Ltd | High voltage current interrupter and an actuator system for a high voltage current interrupter |
| US20140002215A1 (en) * | 2012-06-29 | 2014-01-02 | Siemens Industry, Inc. | Electrical contact apparatus, assemblies, and methods of operation |
| CN106663563B (zh) * | 2014-09-18 | 2019-05-28 | 三菱电机株式会社 | 开关器 |
| KR101697678B1 (ko) * | 2014-12-30 | 2017-01-18 | 주식회사 효성 | 고속 스위치 장치 |
| US10593493B2 (en) | 2016-03-07 | 2020-03-17 | Mitsubishi Electric Corporation | Electromagnetically moving device |
| FR3053522B1 (fr) * | 2016-07-01 | 2018-08-17 | Safran Landing Systems | Electro-aimant lineaire bistable |
| EP3270398B1 (en) * | 2016-07-12 | 2021-04-07 | ABB Schweiz AG | Actuator for a medium voltage circuit breaker |
| US10580599B1 (en) * | 2018-08-21 | 2020-03-03 | Eaton Intelligent Power Limited | Vacuum circuit interrupter with actuation having active damping |
| FR3090119B1 (fr) * | 2018-12-18 | 2022-03-04 | Electricite De France | Dispositif de mesure de l’état de fonctionnement d’au moins un matériel générant un champ magnétique |
| JP6973365B2 (ja) | 2018-12-19 | 2021-11-24 | オムロン株式会社 | 継電器状態判定装置、継電器状態判定システム、継電器状態判定方法、およびプログラム |
| JP6988785B2 (ja) * | 2018-12-28 | 2022-01-05 | オムロン株式会社 | 継電器状態予測装置、継電器状態予測システム、継電器状態予測方法、およびプログラム |
| FR3093226B1 (fr) * | 2019-02-25 | 2021-01-22 | Schneider Electric Ind Sas | Système d'actionnement pour une ampoule à vide |
| US11152174B2 (en) | 2019-06-19 | 2021-10-19 | Eaton Intelligent Power Limited | Dual thomson coil-actuated, double-bellows vacuum circuit interrupter |
| US11107653B2 (en) * | 2019-06-26 | 2021-08-31 | Eaton Intelligent Power Limited | Dual-action switching mechanism and pole unit for circuit breaker |
| CN110686883B (zh) * | 2019-11-01 | 2021-08-10 | 珠海优特电力科技股份有限公司 | 刀闸分合状态检测装置 |
| CN112490037B (zh) * | 2020-07-10 | 2023-02-28 | 安徽一天电气技术股份有限公司 | 一种开关及其控制方法 |
| US11183348B1 (en) | 2020-07-21 | 2021-11-23 | Eaton Intelligent Power Limited | Vacuum circuit interrupter with decelerator with integrated latch assembly |
| FR3119461B1 (fr) | 2021-02-04 | 2023-07-21 | Schneider Electric Ind Sas | Procédé d’estimation d’un état de fonctionnement d’un appareil de commutation électrique et appareil de commutation électrique pour la mise en œuvre d’un tel procédé |
| US11855421B2 (en) * | 2022-04-21 | 2023-12-26 | Jst Power Equipment, Inc. | Circuit breaker with indicator of breaker position |
| CN117894634A (zh) * | 2024-03-15 | 2024-04-16 | 厦门理工学院 | 一种基于恒磁感应强度的接触器驱动电路及装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000509917A (ja) * | 1997-02-28 | 2000-08-02 | エフエーファウ・モトーレンテヒニク・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング・ウント・コンパニー・コマンディトゲゼルシャフト | 特に電磁アクチエータの接片の衝突速度を制御するための動きを認識する方法およびこの方法を実施するアクチエータ |
| JP2005078971A (ja) * | 2003-09-01 | 2005-03-24 | Mitsubishi Electric Corp | 電磁反発駆動電力用開閉装置 |
| JP2005223168A (ja) * | 2004-02-06 | 2005-08-18 | Mitsubishi Electric Corp | 電磁アクチュエータ及びその制御方法 |
| WO2005111641A1 (ja) * | 2004-05-13 | 2005-11-24 | Mitsubishi Denki Kabushiki Kaisha | 状態把握装置およびこの状態把握装置を使用した電力開閉機器の開閉制御装置 |
| JP2006004902A (ja) * | 2003-09-01 | 2006-01-05 | Mitsubishi Electric Corp | 電磁操作機構およびそれを使用する電力用開閉装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4659969A (en) * | 1984-08-09 | 1987-04-21 | Synektron Corporation | Variable reluctance actuator having position sensing and control |
| US4680562A (en) * | 1985-07-29 | 1987-07-14 | Westinghouse Electric Corp. | Integral circuit interrupter with separable modules |
| JPH0415324A (ja) * | 1990-05-09 | 1992-01-20 | Tochigi Fuji Ind Co Ltd | 電磁アクチュエータ |
| US5629869A (en) | 1994-04-11 | 1997-05-13 | Abb Power T&D Company | Intelligent circuit breaker providing synchronous switching and condition monitoring |
| US6208497B1 (en) * | 1997-06-26 | 2001-03-27 | Venture Scientifics, Llc | System and method for servo control of nonlinear electromagnetic actuators |
| JPH11356029A (ja) * | 1998-04-08 | 1999-12-24 | Mikuni Corp | 電磁アクチュエ―タ |
| JP2002529842A (ja) * | 1998-11-06 | 2002-09-10 | シーメンス オートモーティヴ コーポレイション | 電気機械アクチュエーターの流量制御のための補償方法 |
| US6249418B1 (en) * | 1999-01-27 | 2001-06-19 | Gary Bergstrom | System for control of an electromagnetic actuator |
| GB2350724B (en) | 1999-05-29 | 2003-12-03 | Alstom Uk Ltd | Magnetic actuator arrangement |
| US6657847B1 (en) * | 1999-07-13 | 2003-12-02 | Siemens Automotive Corporation | Method of using inductance for determining the position of an armature in an electromagnetic solenoid |
| JP3508636B2 (ja) * | 1999-08-19 | 2004-03-22 | 日産自動車株式会社 | 電磁駆動吸排気弁の制御装置 |
| US6917203B1 (en) * | 2001-09-07 | 2005-07-12 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Current signature sensor |
| US7099136B2 (en) * | 2002-10-23 | 2006-08-29 | Seale Joseph B | State space control of solenoids |
-
2006
- 2006-03-17 US US12/282,589 patent/US7739058B2/en not_active Expired - Fee Related
- 2006-03-17 EP EP06729352.2A patent/EP1998351B1/en not_active Ceased
- 2006-03-17 WO PCT/JP2006/305362 patent/WO2007108063A1/ja active Application Filing
- 2006-03-17 JP JP2008506079A patent/JP4535193B2/ja not_active Expired - Fee Related
- 2006-03-17 CN CN2006800529112A patent/CN101375359B/zh not_active Expired - Fee Related
- 2006-09-19 TW TW095134533A patent/TW200737260A/zh not_active IP Right Cessation
-
2009
- 2009-06-10 HK HK09105192.6A patent/HK1127528A1/xx not_active IP Right Cessation
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000509917A (ja) * | 1997-02-28 | 2000-08-02 | エフエーファウ・モトーレンテヒニク・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング・ウント・コンパニー・コマンディトゲゼルシャフト | 特に電磁アクチエータの接片の衝突速度を制御するための動きを認識する方法およびこの方法を実施するアクチエータ |
| JP2005078971A (ja) * | 2003-09-01 | 2005-03-24 | Mitsubishi Electric Corp | 電磁反発駆動電力用開閉装置 |
| JP2006004902A (ja) * | 2003-09-01 | 2006-01-05 | Mitsubishi Electric Corp | 電磁操作機構およびそれを使用する電力用開閉装置 |
| JP2005223168A (ja) * | 2004-02-06 | 2005-08-18 | Mitsubishi Electric Corp | 電磁アクチュエータ及びその制御方法 |
| WO2005111641A1 (ja) * | 2004-05-13 | 2005-11-24 | Mitsubishi Denki Kabushiki Kaisha | 状態把握装置およびこの状態把握装置を使用した電力開閉機器の開閉制御装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220128170A1 (en) * | 2020-10-20 | 2022-04-28 | Robert Bosch Gmbh | Method for determining a switching point of a solenoid valve |
| US11933423B2 (en) * | 2020-10-20 | 2024-03-19 | Robert Bosch Gmbh | Method for determining a switching point of a solenoid valve |
Also Published As
| Publication number | Publication date |
|---|---|
| HK1127528A1 (en) | 2009-09-25 |
| CN101375359A (zh) | 2009-02-25 |
| US20090138212A1 (en) | 2009-05-28 |
| TW200737260A (en) | 2007-10-01 |
| EP1998351A1 (en) | 2008-12-03 |
| WO2007108063A1 (ja) | 2007-09-27 |
| JPWO2007108063A1 (ja) | 2009-07-30 |
| TWI321333B (ja) | 2010-03-01 |
| US7739058B2 (en) | 2010-06-15 |
| CN101375359B (zh) | 2011-07-27 |
| EP1998351B1 (en) | 2013-05-22 |
| EP1998351A4 (en) | 2011-06-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4535193B2 (ja) | 状態把握装置およびこの状態把握装置を備えた開閉制御装置 | |
| KR101107809B1 (ko) | 상태 파악 장치 및 이 상태 파악 장치를 사용한 전력 개폐 기기의 개폐 제어 장치 | |
| US9733292B2 (en) | Method for diagnosing an operating state of a contactor and contactor for implementing said method | |
| KR101360754B1 (ko) | 전자기 스위칭 장치의 콘택 부식을 결정하는 방법 및그러한 방법에 따라 동작하는 메커니즘을 포함하는 전자기스위칭 장치 | |
| JP5225198B2 (ja) | 開閉装置又は電磁操作装置の状態把握装置 | |
| CN100580474C (zh) | 状态把握装置以及使用了该状态把握装置的电力开关设备的开关控制装置 | |
| EP3460822B1 (en) | Method for operating a medium voltage circuit breaker or recloser and medium voltage circuit breaker or recloser itself | |
| EP2724121B1 (en) | Electromagnetic actuators and monitoring thereof | |
| JP2006226993A (ja) | モータの絶縁抵抗劣化検出方法、絶縁抵抗劣化検出装置およびモータ駆動装置 | |
| CN104360262A (zh) | 基于特征点的断路器操作机构分合闸线圈电流比对方法 | |
| EP2814044A1 (en) | Method and apparatus for determining the condition of a control element | |
| JP2003308751A (ja) | 開閉器の動作特性監視装置 | |
| CN201429644Y (zh) | 一种超大电流霍尔检测装置 | |
| JP2009212024A (ja) | 開閉装置 | |
| JP6120651B2 (ja) | 電磁式可動装置および可動部挙動推定方法 | |
| JP2008293682A (ja) | 開閉器の動作特性監視装置 | |
| KR100455183B1 (ko) | 왕복동식 압축기의 스트로크 추정방법 | |
| RU2297704C1 (ru) | Способ защиты асинхронного двигателя от витковых замыканий | |
| JP2005257669A (ja) | 移動部材の速度検出方法及び電磁アクチュエータ駆動装置 | |
| JP2722793B2 (ja) | 開閉機器の動作診断装置 | |
| JPS61203517A (ja) | 開閉装置診断方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100525 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100607 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130625 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4535193 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |