JP4504646B2 - レーダ装置および類似装置 - Google Patents
レーダ装置および類似装置 Download PDFInfo
- Publication number
- JP4504646B2 JP4504646B2 JP2003306967A JP2003306967A JP4504646B2 JP 4504646 B2 JP4504646 B2 JP 4504646B2 JP 2003306967 A JP2003306967 A JP 2003306967A JP 2003306967 A JP2003306967 A JP 2003306967A JP 4504646 B2 JP4504646 B2 JP 4504646B2
- Authority
- JP
- Japan
- Prior art keywords
- sweep
- data
- actual
- sweep data
- interpolation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 claims description 34
- 238000000034 method Methods 0.000 claims description 15
- 230000015654 memory Effects 0.000 description 104
- 238000010586 diagram Methods 0.000 description 53
- 230000005540 biological transmission Effects 0.000 description 19
- 238000002955 isolation Methods 0.000 description 14
- 230000003111 delayed effect Effects 0.000 description 3
- 241000965481 Darksidea alpha Species 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
Images

















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/04—Display arrangements
- G01S7/06—Cathode-ray tube displays or other two dimensional or three-dimensional displays
- G01S7/064—Cathode-ray tube displays or other two dimensional or three-dimensional displays using a display memory for image processing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/04—Display arrangements
- G01S7/046—Display arrangements using an intermediate storage device, e.g. a recording/reproducing device
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/04—Display arrangements
- G01S7/06—Cathode-ray tube displays or other two dimensional or three-dimensional displays
- G01S7/10—Providing two-dimensional and co-ordinated display of distance and direction
- G01S7/12—Plan-position indicators, i.e. P.P.I.
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/04—Display arrangements
- G01S7/06—Cathode-ray tube displays or other two dimensional or three-dimensional displays
- G01S7/24—Cathode-ray tube displays or other two dimensional or three-dimensional displays the display being orientated or displaced in accordance with movement of object carrying the transmitting and receiving apparatus, e.g. true-motion radar
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/28—Details of pulse systems
- G01S7/285—Receivers
- G01S7/295—Means for transforming co-ordinates or for evaluating data, e.g. using computers
- G01S7/298—Scan converters
Description
このような従来のレーダ装置について図を参照して説明する。
図14は、従来のレーダ装置の主要部の構成を表すブロック図である。
アンテナ1は、所定回転周期で水平面を回転しながら、所定送信周期でパルス状電波を外部に送信するとともに、物標で反射した電波を極座標系で受信して、受信部2にこの受信信号を出力する。また、アンテナ1は、加算器5に船首方向を基準としたアンテナ相対方位θa を出力する。受信部2は、アンテナ1からの受信信号を検波して増幅し、AD変換部3に出力する。AD変換部3は、このアナログ形式の受信信号を複数ビットからなるディジタル信号(受信データ)に変換する。第1、第2スイープメモリ4a,4bは、それぞれ、ディジタル変換された1スイープ分の受信データを実時間で記憶し、次の送信により得られる受信データが再び書き込まれるまでに、この1スイープ分のデータを画像メモリ8に出力する。
X=Xs+r・sinθ
Y=Ys+r・cosθ
ただし、
X,Y:画像メモリの画素を指定する番地
Xs,Ys:スイープの中心番地
r:中心からの距離
θ:スイープ方位
描画タイミング発生部10は、描画に必要な制御信号を発生し、スイープメモリ4、ラッチ回路6、描画アドレス発生部7,画像メモリ8に出力する。

図18に示すように、距離方向に不連続に存在するノイズのような画像データが実スイープデータに存在する場合、これに続く補間スイープデータも同じ画像データとなるので、ノイズが方位方向に強調表示されてしまう。
図1は本実施形態に係るレーダ装置の主要部の構成を表すブロック図である。
アンテナ1は、所定回転周期で水平面に回転しながら、所定送受信周期でパルス状電波を外部に送信するとともに、物標で反射した電波を極座標系で受信して、受信部2に出力し、加算器5に船首方向を基準としたアンテナ相対方位θa を出力する。受信部2は、アンテナ1からの受信信号を検波して増幅し、AD変換部3に出力する。AD変換部3は、このアナログ形式の受信信号を複数ビットからなるディジタル信号(受信データ)に変換する。
例えば、ノースアップ表示を行う場合、北方向を基準として、
X=Xs+r・sinθs
Y=Ys+r・cosθs
ただし、
X,Y:画像メモリの画素を指定する番地
Xs,Ys:スイープの中心番地
r:中心からの距離
θs :スイープ方位
描画タイミング発生部10は、描画に必要な制御信号を発生し、スイープメモリ4、ラッチ回路6、描画アドレス発生部7、画像メモリ8、スイープデータ発生部11、スイープ方位発生部12に出力する。
スイープ方位発生部12は、具体的には、図2に示す等価回路図で示される回路からなり、図3に示すタイミングチャートに従い動作する。図2はスイープ方位発生部の等価回路図であり、図3はそのタイミングチャートを示す。
ある時点での実スイープ方位(今回の実スイープ方位)αが入力されると、この実スイープ方位αと前回の実スイープ方位βとを用いて、この間の補間スイープ方位を算出する。
具体的には、画像メモリの更新に必要なスイープ間の角度差δを画素数やスイープ半径等により予め設定しておく。
N=|α−β|/δ
となる。このため、前回の実スイープと今回の実スイープとの間の補間スイープの本数はNNは、
NN=N−1
となる。
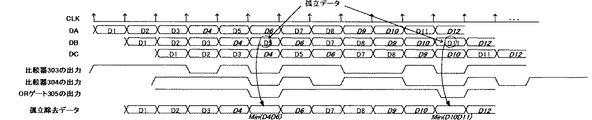
図6は孤立除去部31の等価回路図である。
また、図7は孤立除去動作のタイミングチャートである。図7において、D1〜D12は同一スイープ上のデータであり、D1から順に中心から離れていく方向のデータを示す。また、min(Da,Db)はスイープデータDa,Dbのうち小さい方を示す。なお、以下の説明では、この孤立除去部31は、着目するデータの前後に隣り合うそれぞれ一つのデータを距離方向孤立の基準にした場合の回路である。
DFF301,302は、スイープメモリ4から読み出したデータを距離方向に対して1クロックずつシフトさせる。ここで、読み出して遅延操作を行わないデータをDAとし、1クロック遅延させたデータをDBとし、さらに1クロック遅延させたデータをDCとすると、DFF301はデータDBをセレクタ306に出力し、DFF302はデータDCを比較器304、比較器306およびセレクタ307に出力する。
図9は線形補間データ発生部34の等価回路図である。
DFF401は、ラッチ回路6から入力された実スイープ方位をスイープトリガの入力周期に基づいて遅延させて減算器402に出力する。
N=(θn −θm )/δ
NN=N−1
から算出し、補間データ差分値発生部405に出力する。
ΔD=(a−b)/N
から算出し、加算器408に出力する。
図10は、本実施形態のレーダ装置のタイミングチャートである。
送信トリガは電波の送信タイミングを与えるトリガ信号であり、第1スイープメモリ4aと第2スイープメモリ4bとは、この送信トリガにより、実スイープデータの書き込みを交互に行う。すなわち、図に示すように、まず第1スイープメモリ4aに実スイープデータBが書き込まれ、次の送信トリガで第2スイープメモリ4bに実スイープデータCが書き込まれ、さらに次の送信トリガで第1スイープメモリ4aに実スイープデータDが書き込まれる。また、この時点のスイープ方位θが加算器5に出力され、ラッチ回路6でラッチされてスイープ方位発生部12に入力される。
(n・δ<|θn −θm |≦(n+1)・δ)
となる場合、描画アドレス発生部7に実スイープ方位θmを与えた後、補間スイープ方位として、θm +δ、θm +2δの順で、θm +nδを与えた後、実スイープ方位θn を与える。図10に示す例では、実スイープ方位θnを与えた後、補間スイープ方位θn+1 ,θn+2 を与え、その後実スイープ方位θn+3 を与える。そして、次の実スイープ方位θn+5 が入力されるまで、スイープ方位の発生動作は停止し、実スイープ方位θn+5 が入力されると、同様に、補間スイープ方位θn+4 と実スイープ方位θn+5 が順に描画スイープ方位として与えられる。
孤立除去実スイープデータD’を生成し、孤立除去実スイープデータC’,D’とから線形補間処理を行い、補間スイープデータCD(=C’+(D’−C’)/2)を生成して画像メモリ8に出力する。
2−受信部
3−AD変換部
4,4a,4b,33−スイープメモリ
5−加算器
6−ラッチ回路
7−描画アドレス発生部
8−画像メモリ
9−表示器
10−描画タイミング発生部
11−スイープデータ発生部
12−スイープ方位発生部
20−コンパス
31−距離方向孤立除去部
34−線形補間データ発生部
403−補間データ本数発生部
405−補間データ差分値発生部
Claims (6)
- アンテナで受信した探知信号に基づいて順次形成される実スイープデータと、方位方向に隣り合う前記実スイープデータ間を補間する補間スイープデータとにより探知画像データを形成するレーダ装置および類似装置において、
今回の実スイープのスイープ方位と前回の実スイープのスイープ方位とを用いて、これらの実スイープ間に形成する補間スイープのスイープ方位を算出する補間スイープ方位算出手段と、
今回の実スイープのスイープ方位と、前回の実スイープ方位と、前記探知画像データを形成するために必要なスイープ間の角度差とに基づいて、前記補間スイープの本数を算出する補間スイープ数算出手段と、
今回の実スイープデータと前回の実スイープデータとを用いて、これら実スイープデータ間の補間スイープデータの値を、極座標系において前回の実スイープデータと今回の実スイープデータとにおけるスイープ上の同一距離の位置となる方位方向に隣り合うデータの値と、前記補間スイープの本数とから算出し、該算出された補間スイープデータと前記実スイープデータとを用いて極座標系のスイープデータを形成するスイープデータ形成手段と、を備えることを特徴とするレーダ装置および類似装置。 - 前記スイープデータ形成手段は、前記補間スイープデータを線形補間値で算出する請求項1に記載のレーダ装置および類似装置。
- 前記スイープデータ形成手段は、
前記実スイープデータの距離方向に並ぶ複数のデータのうち、所定範囲内に所定閾値以上のデータが単独で存在する場合に、該単独のデータを変換して補正実スイープデータを形成する補正実スイープデータ形成手段と、
該補正実スイープデータ形成手段で形成された補正実スイープデータが存在する位置では、前記実スイープデータに替えて前記補正実スイープデータを用いて補正補間スイープデータを算出する補正補間スイープデータ算出手段とを備え、
前記補正実スイープデータと前記補正補間スイープデータとを用いて前記スイープデータを形成する請求項1または請求項2に記載のレーダ装置および類似装置。 - アンテナで受信した探知信号に基づいて順次形成される実スイープデータと、方位方向に隣り合う前記実スイープデータ間を補間する補間スイープデータとにより探知画像データを形成するレーダ装置および類似装置において、
前記実スイープデータの距離方向に並ぶ複数のデータのうち、所定範囲内に所定閾値以上のデータが単独で存在する場合に、該単独のデータを変換して補正実スイープデータを形成する補正実スイープデータ形成手段と、
該補正実スイープデータ形成手段で形成された補正実スイープデータを用いて、前回の補正実スイープデータと今回の補正実スイープデータとにおけるスイープ上の同一距離の位置となる方位方向に隣り合うデータから補正補間スイープデータを極座標系で算出する補正補間スイープデータ算出手段とを備え、
前記補正実スイープデータと前記補正補間スイープデータとを用いてスイープデータを形成することを特徴とするレーダ装置および類似装置。 - アンテナで受信した探知信号に基づいて順次形成される実スイープデータと、方位方向に隣り合う前記実スイープデータ間を補間する補間スイープデータとにより探知画像データを形成するレーダ装置および類似装置のスイープデータ形成方法であって、
今回の実スイープのスイープ方位と前回の実スイープのスイープ方位とを用いて、これらの実スイープ間に形成する補間スイープのスイープ方位を算出し、
今回の実スイープのスイープ方位と、前回の実スイープ方位と、前記探知画像データを形成するために必要なスイープ間の角度差とに基づいて、前記補間スイープの本数を算出し、
今回の実スイープデータと前回の実スイープデータとを用いて、これら実スイープデータ間の補間スイープデータの値を、極座標系において前回の実スイープデータと今回の実スイープデータとにおけるスイープ上の同一距離の位置となる方位方向に隣り合うデータの値と、前記補間スイープの本数とから算出し、
該算出された補間スイープデータと前記実スイープデータとを用いて極座標系のスイープデータを形成することを特徴とするレーダ装置および類似装置のスイープデータ形成方法。 - アンテナで受信した探知信号に基づいて順次形成される実スイープデータと、方位方向に隣り合う前記実スイープデータ間を補間する補間スイープデータとにより探知画像データを形成するレーダ装置および類似装置のスイープデータ形成方法であって、
前記実スイープデータの距離方向に並ぶ複数のデータのうち、所定範囲内に所定閾値以上のデータが単独で存在する場合に、該単独のデータを変換して補正実スイープデータを形成するとともに、
該補正実スイープデータを用いて前回の補正実スイープデータと今回の補正実スイープデータとにおけるスイープ上の同一距離の位置となる方位方向に隣り合うデータから補正補間スイープデータを極座標系で算出し、
前記補正実スイープデータと前記補正補間スイープデータとを用いて極座標系のスイープデータを形成することを特徴とするレーダ装置および類似装置のスイープデータ形成方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003306967A JP4504646B2 (ja) | 2003-08-29 | 2003-08-29 | レーダ装置および類似装置 |
| GB0603674A GB2420925B (en) | 2003-08-29 | 2004-08-26 | Radar apparatus or like |
| US10/569,944 US7834805B2 (en) | 2003-08-29 | 2004-08-26 | Radar apparatus |
| PCT/JP2004/012668 WO2005022192A1 (ja) | 2003-08-29 | 2004-08-26 | レーダ装置および類似装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003306967A JP4504646B2 (ja) | 2003-08-29 | 2003-08-29 | レーダ装置および類似装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005077213A JP2005077213A (ja) | 2005-03-24 |
| JP2005077213A5 JP2005077213A5 (ja) | 2006-05-11 |
| JP4504646B2 true JP4504646B2 (ja) | 2010-07-14 |
Family
ID=34269414
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003306967A Expired - Fee Related JP4504646B2 (ja) | 2003-08-29 | 2003-08-29 | レーダ装置および類似装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7834805B2 (ja) |
| JP (1) | JP4504646B2 (ja) |
| GB (1) | GB2420925B (ja) |
| WO (1) | WO2005022192A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5580621B2 (ja) * | 2010-02-23 | 2014-08-27 | 古野電気株式会社 | エコー信号処理装置、レーダ装置、エコー信号処理方法、およびエコー信号処理プログラム |
| JP5697910B2 (ja) * | 2010-07-06 | 2015-04-08 | 古野電気株式会社 | 閾値設定方法、物標探知方法、閾値設定装置、物標探知装置、閾値設定プログラム、および物標探知プログラム |
| JP2013145173A (ja) * | 2012-01-13 | 2013-07-25 | Furuno Electric Co Ltd | レーダ装置、レーダ画像データ処理プログラム、及びレーダ画像データ処理方法 |
| KR101645103B1 (ko) * | 2014-12-24 | 2016-08-03 | 한국공항공사 | 레이더 신호 처리 장치 및 방법 |
| WO2019150848A1 (ja) * | 2018-01-30 | 2019-08-08 | 古野電気株式会社 | レーダアンテナ装置及び方位測定方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2639595B2 (ja) * | 1990-04-13 | 1997-08-13 | アンリツ株式会社 | レーダー装置 |
| JP2001183462A (ja) * | 1999-12-27 | 2001-07-06 | Honda Motor Co Ltd | 物体検知装置 |
| JP3256655B2 (ja) * | 1996-04-12 | 2002-02-12 | 大阪瓦斯株式会社 | 埋設物の探査方法および装置 |
| WO2002012915A1 (en) * | 2000-08-09 | 2002-02-14 | Fujitsu Limited | Radar video transmission system |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6024429B2 (ja) * | 1977-08-15 | 1985-06-12 | 沖電気工業株式会社 | デイジタル走査変換方式 |
| JPS5578947A (en) * | 1978-12-08 | 1980-06-14 | Matsushita Electric Ind Co Ltd | Method of displaying ultrasoniccwave diagnosis device |
| US4241412A (en) * | 1979-03-16 | 1980-12-23 | Diasonics, Inc. | Polar to cartesian mapping apparatus and method |
| US4383258A (en) * | 1980-07-14 | 1983-05-10 | The United States Of America As Represented By The Secretary Of The Navy | Time encoded spatial display |
| US4468747A (en) * | 1980-11-03 | 1984-08-28 | Hewlett-Packard Company | Scan converter system |
| US4471449A (en) * | 1980-11-03 | 1984-09-11 | Hewlett-Packard Company | Scan converter system |
| US4656467A (en) * | 1981-01-26 | 1987-04-07 | Rca Corporation | TV graphic displays without quantizing errors from compact image memory |
| JPS57175972A (en) * | 1981-04-23 | 1982-10-29 | Mitsubishi Electric Corp | Digital scan converter |
| FR2577681B1 (fr) * | 1985-02-15 | 1987-09-04 | Thomson Csf | Procede d'extension de la gamme des frequences des recurrences radar acceptables par un transformateur numerique d'images et moyens de mise en oeuvre de ce procede |
| US4689675A (en) * | 1985-05-23 | 1987-08-25 | Advanced Systems Development, Inc. | Digital scan converter and method therefor |
| US4829308A (en) * | 1985-10-07 | 1989-05-09 | Raytheon Company | Raster display system |
| JPS62129036A (ja) * | 1985-11-29 | 1987-06-11 | 横河メディカルシステム株式会社 | デイジタルスキヤンコンバ−タ |
| US4845501A (en) * | 1986-01-27 | 1989-07-04 | Raytheon Company | Radar video scan converter |
| US4833475A (en) * | 1986-01-27 | 1989-05-23 | Raytheon Company | Raster scan radar with true motion memory |
| JPS62278475A (ja) * | 1986-05-27 | 1987-12-03 | Nec Corp | レ−ダスキヤンコンバ−タ装置 |
| JPH02162282A (ja) * | 1988-12-15 | 1990-06-21 | Mitsubishi Electric Corp | 走査変換器 |
| US4931801A (en) * | 1989-04-24 | 1990-06-05 | Honeywell Inc. | Method and apparatus to scan convert radar video to television outputs |
| JPH0545443A (ja) * | 1991-08-19 | 1993-02-23 | Fujitsu Ltd | レーダ指示装置 |
| US5528302A (en) * | 1995-08-31 | 1996-06-18 | University Of Washington | Real-time ultrasound scan conversion |
| JPH09211105A (ja) * | 1996-01-30 | 1997-08-15 | Japan Radio Co Ltd | 走査変換方式 |
| US5860925A (en) * | 1997-06-27 | 1999-01-19 | Siemens Medical Systems, Inc. | Ultrasound scan conversion method |
| GB2342523B (en) * | 1998-06-09 | 2003-09-17 | Furuno Electric Co | Radar and like systems and method for improving image quality |
| JP4108230B2 (ja) | 1998-09-01 | 2008-06-25 | 古野電気株式会社 | レーダー装置及び類似装置並びに受信データとスイープラインの書込方法 |
| US6621451B1 (en) * | 2002-08-13 | 2003-09-16 | Honeywell International Inc. | Use of texture memory for WX scan conversion |
-
2003
- 2003-08-29 JP JP2003306967A patent/JP4504646B2/ja not_active Expired - Fee Related
-
2004
- 2004-08-26 US US10/569,944 patent/US7834805B2/en active Active
- 2004-08-26 GB GB0603674A patent/GB2420925B/en not_active Expired - Fee Related
- 2004-08-26 WO PCT/JP2004/012668 patent/WO2005022192A1/ja active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2639595B2 (ja) * | 1990-04-13 | 1997-08-13 | アンリツ株式会社 | レーダー装置 |
| JP3256655B2 (ja) * | 1996-04-12 | 2002-02-12 | 大阪瓦斯株式会社 | 埋設物の探査方法および装置 |
| JP2001183462A (ja) * | 1999-12-27 | 2001-07-06 | Honda Motor Co Ltd | 物体検知装置 |
| WO2002012915A1 (en) * | 2000-08-09 | 2002-02-14 | Fujitsu Limited | Radar video transmission system |
Also Published As
| Publication number | Publication date |
|---|---|
| GB2420925A (en) | 2006-06-07 |
| US7834805B2 (en) | 2010-11-16 |
| JP2005077213A (ja) | 2005-03-24 |
| US20090121922A1 (en) | 2009-05-14 |
| GB0603674D0 (en) | 2006-04-05 |
| GB2420925B (en) | 2007-03-07 |
| WO2005022192A1 (ja) | 2005-03-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7423581B2 (en) | Radar and similar apparatus | |
| JP5159056B2 (ja) | レーダ装置および類似装置 | |
| JP5180543B2 (ja) | レーダ装置または該レーダ装置に類似する装置 | |
| JP5398195B2 (ja) | レーダ装置 | |
| JP2012017995A (ja) | 閾値設定方法、物標探知方法、閾値設定装置、物標探知装置、閾値設定プログラム、および物標探知プログラム | |
| JP2011145069A (ja) | 偽像低減装置、レーダ装置、偽像低減方法、および偽像低減プログラム | |
| JP4504646B2 (ja) | レーダ装置および類似装置 | |
| JP2000065920A (ja) | レーダー装置及び類似装置並びに受信データの書込方法 | |
| JP4164406B2 (ja) | レーダ装置および類似装置 | |
| JP5342042B2 (ja) | 物標を探知して表示する装置 | |
| US7679548B2 (en) | Radar apparatus | |
| JP5159121B2 (ja) | レーダ装置、類似装置、および探知画像表示方法 | |
| KR100990178B1 (ko) | 레이다의 영상 잡음 제거 방법 및 그 장치 | |
| JPWO2017163716A1 (ja) | レーダ装置及び航跡表示方法 | |
| JP4197635B2 (ja) | レーダ装置および類似装置 | |
| JP4145724B2 (ja) | レーダ装置および類似装置 | |
| JPS6150082A (ja) | 情報処理方式 | |
| JP5342043B2 (ja) | 物標を探知して表示する装置 | |
| JPH10123231A (ja) | レーダ映像表示方法及びレーダ映像表示装置 | |
| JPH10123232A (ja) | レーダ映像表示方法及びレーダ映像表示装置 | |
| JP4886622B2 (ja) | スキャンコンバータ、レーダ装置及びスキャンコンバート方法 | |
| JP2003028950A (ja) | レーダー装置及び類似装置並びに画像データ書込方法 | |
| JPH09211105A (ja) | 走査変換方式 | |
| JPH0792254A (ja) | 走査線データ補正回路 | |
| JP2011158346A (ja) | 画像処理装置、レーダ装置、画像処理方法および画像処理プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060317 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060317 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080819 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081020 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090407 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090603 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20090603 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091208 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100208 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100330 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100423 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4504646 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130430 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140430 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |