JP4496758B2 - 車線逸脱防止装置 - Google Patents
車線逸脱防止装置 Download PDFInfo
- Publication number
- JP4496758B2 JP4496758B2 JP2003369447A JP2003369447A JP4496758B2 JP 4496758 B2 JP4496758 B2 JP 4496758B2 JP 2003369447 A JP2003369447 A JP 2003369447A JP 2003369447 A JP2003369447 A JP 2003369447A JP 4496758 B2 JP4496758 B2 JP 4496758B2
- Authority
- JP
- Japan
- Prior art keywords
- departure
- yaw moment
- lane
- control
- steering
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/08—Lane monitoring; Lane Keeping Systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/08—Lane monitoring; Lane Keeping Systems
- B60T2201/083—Lane monitoring; Lane Keeping Systems using active brake actuation
Landscapes
- Auxiliary Drives, Propulsion Controls, And Safety Devices (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
- Traffic Control Systems (AREA)
Description
このようなことから、運転者がステアリングホイールを操作し、ハンドル舵角が入力されている場合でも、前記逸脱推定量に基づくヨーモーメントが車両に付与されてしまう場合がある。この場合、車両がステアリングホイールの操作と異なる車両挙動を示すことになり、これが運転者に違和感を与えてしまう。
そこで、本発明は、前述の問題に鑑みてなされたものであり、運転者に違和感を与えることなく、車線逸脱の制御を実現する車線逸脱防止装置の提供を目的とする。
そして、本発明に係る車線逸脱防止装置は、目標ヨーモーメントに基づいて、自車両に車線逸脱を回避する方向のヨーモーメントが付与されるように左右輪の制動力を調整して左右輪に制動力差を発生させるとともに、減速制御量に基づいて、自車両が減速するように左右輪の制動力を調整して左右輪に等分の制動力を発生させるように各車輪の制動力を制御する。
また、本発明に係る車線逸脱防止装置は、操舵状態としての操舵速度が所定のしきい値より大きい場合、制動力制御手段の制御内容を変更することとして、減速制御量を減少させる。
図1は、本発明の車線逸脱防止装置の第1実施形態を示す概略構成図である。
また、この車両には、画像処理機能付きの撮像部13が設けられている。撮像部13は、自車両の車線逸脱傾向検出用に走行車線内の自車両の位置を検出するためのものである。例えば、撮像部13は、CCDカメラからなる単眼カメラで撮像するように構成されている。この撮像部13は車両前部に設置されている。
次に、制駆動力コントロールユニット8で行う演算処理手順について、図2を用いて説明する。この演算処理は、例えば10msec.毎の所定サンプリング時間ΔT毎にタイマ割込によって実行される。なお、この図2に示す処理内には通信処理を設けていないが、演算処理によって得られた情報は随時記憶装置に更新記憶されると共に、必要な情報は随時記憶装置から読出される。
前輪駆動の場合
V=(Vwrl+Vwrr)/2
後輪駆動の場合
V=(Vwfl+Vwfr)/2
・・・(1)
ここで、Vwfl,Vwfrは左右前輪それぞれの車輪速度であり、Vwrl,Vwrrは左右後輪それぞれの車輪速度である。すなわち、この(1)式では、従動輪の車輪速の平均値として車速Vを算出している。なお、本実施の形態では、後輪駆動の車両であるので、後者の式、すなわち前輪の車輪速度により車速Vを算出する。
続いてステップS3において、走行環境を判定する。具体的には、自車両が走行している道路の種類、自車両の走行車線を検出する。そして、その検出結果から、安全度に基づいた方向の判定をする。判定は、道路情報、すなわち車線数や一般道路か高速道路かを示す道路種別情報や撮像部13が得た画像情報に基づいて行う。図3はその走行環境判定の具体的な処理手順を示す。
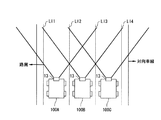
続いてステップS23において、撮像部13が得た撮像画像から白線部分(車線区分線部分)を抽出する。ここで、図4に示すように自車両が片側3車線の道路を走行している場合を例に挙げて説明する。この図4に示すように、道路は、左側から第1乃至第4白線LI1,LI2,LI3,LI4により区分されることで、片側3車線の道路として構成されている。このような道路を自車両が走行する場合、車線毎で得られる撮像画像は異なる。さらにその画像中から白線を抽出して構成される画像も、走行車線に応じて異なるものになる。
また、右側車線を自車両100Cが走行している場合、左方向、すなわち隣車線に逸脱するときよりも、右方向、すなわち対向車線に逸脱したときの方が安全度が低くなる。よって、この場合、右側車線を自車両100Aが走行している場合、第1障害物等存在方向Soutが右方向であると判定する(Sout=right)。
また、車線数で比較した場合、左方向が路肩になり、右方向が対向車線になる片側1車線のときがより安全度が低くなる。この場合には、左右両方向が第1障害物等存在方向Soutであると判定する(Sout=both)。
続いてステップS4において、車線逸脱傾向の判定を行う。この判定の処理の処理手順は具体的には図6に示すようになる。
先ずステップS31において、逸脱予測時間Toutを算出する。具体的には、dxを前記横変位Xの変化量(単位時間当たりの変化量)とし、Lを車線幅とし、横変位Xを用いて、下記(2)式により逸脱予測時間Toutを算出する(X,dx,Lの値については図7を参照)。
この(2)式によれば、車線中央(X=0)からXだけ横変位している車両100が、その位置から距離L/2だけ離れた外側位置領域(例えば路肩)に至るまでの逸脱予測時間Toutを求めることができる。
なお、車線幅Lについては、撮像部13が撮像画像を処理することで得ている。また、ナビゲーション装置15から車両の位置を得たり、ナビゲーション装置15の地図データから車線幅Lを得てもよい。
続いてステップS33において、横変位Xに基づいて逸脱方向Doutを判定する。具体的には、車線中央から左方向に横変位している場合、その方向を逸脱方向Doutにし(Dout=left)、車線中央から右方向に横変位している場合、その方向を逸脱方向Doutにする(Dout=right)。
続いてステップS5において、運転者の車線変更の意図を判定する。具体的には、前記ステップS1で得た方向スイッチ信号及び操舵角δに基づいて、次のように運転者の車線変更の意図を判定する。
方向スイッチ信号が示す方向(ウインカ点灯側)と、前記ステップS4で得た逸脱方向Doutが示す方向とが同じである場合、運転者が意識的に車線変更していると判定し、逸脱判断フラグFoutをOFFに変更する(Fout=OFF)。すなわち、逸脱しないとの判定結果に変更する。
また、方向指示スイッチ20が操作されていない場合には、操舵角δに基づいて運転者の車線変更の意図を判定する。すなわち、運転者が逸脱方向に操舵している場合において、その操舵角δ及びその操舵角の変化量(単位時間当たりの変化量)Δδが設定値以上のときには、運転者が意識的に車線変更していると判定し、逸脱判断フラグFoutをOFFに変更する(Fout=OFF)。
例えば、前記ステップS5で得た逸脱判断フラグFoutのON及びOFFの状態に応じて逸脱の警報を作動させる。例えば、逸脱判断フラグFoutがON(Tout<Ts)になっているが、運転者による操舵操作等により車線逸脱しないと判断できるときには、逸脱の警報を実施する。例えば、音や表示等により警報を行う。
また、逸脱判断フラグFoutがONの場合(Tout<Ts)において、前記ステップS3で得た第1障害物等存在方向Sout及びステップS4で得た逸脱方向Doutに基づいて逸脱回避の制動制御方法も決定する。これについては、後で詳述する。
具体的には、前記ステップS1で得た横変位Xと前記変化量dxとに基づいて、下記(3)式により目標ヨーモーメントMsを算出する。
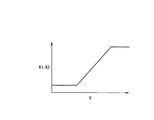
Ms=K1・X+K2・dx ・・・(3)
ここで、K1,K2は車速Vに応じて変動するゲインである。例えば、図8はその例を示す。この図8に示すように、例えばゲインK1,K2は、低速域で小さい値になり、車速Vがある値になると、車速Vの増加に対応して大きくなり、その後ある車速Vに達すると一定値になる。
Pgf=Kgv・V+Kgx・dx ・・・(4)
ここで、Kgv,Kgxはそれぞれ、車速V及び横変化量dxに基づいて設定する、制動力を制動液圧に換算するための換算係数である。例えば、図9はその例を示す。この図9に示すように、例えば換算係数Kgv,Kgxは、低速域で大きい値になり、車速Vがある値になると、車速Vの増加に対応して小さくなり、その後ある車速Vに達すると一定値になる。
このようにステップS8において、逸脱回避用の減速度(具体的には目標制動液圧Pgf,Pgr)を得る。
続いてステップS9において、逸脱判断フラグFoutがONか否かを判定する。ここで、逸脱判断フラグFoutがONの場合、ステップS10に進み、逸脱判断フラグFoutがOFFの場合、ステップS12に進む。
ここで、舵角方向と逸脱回避方向とが一致している場合、前記ステップS12に進み、舵角方向と逸脱回避方向とが一致していない場合、ステップS11に進む。
先ずステップS12では、逸脱判断フラグFoutがOFFの場合(Fout=OFF)、すなわち逸脱しないとの判定結果を得た場合として、次のように目標制動液圧を算出する。
下記(5)式及び(6)式に示すように、各車輪の目標制動液圧Psi(i=fl,fr,rl,rr)をマスタシリンダ液圧Pmf,Pmrにする。
Psfl=Psfr=Pmf ・・・(5)
Psrl=Psrr=Pmr ・・・(6)
ここで、Pmfは前輪用のマスタシリンダ液圧である。また、Pmrは後輪用のマスタシリンダ液圧であり、前後配分を考慮して前輪用のマスタシリンダ液圧Pmfに基づいて算出した値になる。
先ず前記目標ヨーモーメントMsに基づいて、前輪目標制動液圧差ΔPsf及び後輪目標制動液圧差ΔPsrを算出する。具体的には、下記(7)式〜(10)式により目標制動液圧差ΔPsf,ΔPsrを算出する。
Ms<Ms1の場合
ΔPsf=0 ・・・(7)
ΔPsr=2・Kbr・Ms/T ・・・(8)
Ms≧Ms1の場合
ΔPsf=2・Kbf・(Ms−Ms1)/T ・・・(9)
ΔPsr=2・Kbr・Ms1/T ・・・(10)
ここで、Ms1は設定用しきい値を示す。また、Tはトレッドを示す。なお、このトレッドTは、簡単のため前後で同じ値にする。また、Kbf,Kbrは、制動力を制動液圧に換算する場合の前輪及び後輪についての換算係数であり、ブレーキ諸元により定まる。
前記ステップS6では、逸脱判断フラグFoutがONの場合に作動させる制動制御を前記第1障害物等存在方向Soutと前記逸脱方向Doutに基づいて決定しており、ここでは第1障害物等存在方向Soutと逸脱方向Doutとの状態で場合分け(第1のケース〜第3のケース)してその制動制御方法を説明する。
ここで、逸脱を回避するために車両に付与するヨーモーメントの大きさが前記目標ヨーモーメントMsになる。そして、車両へのヨーモーメントの付与は、左右の車輪に与える制動力に差をつけることで行う。具体的には、前述したように、目標ヨーモーメントMsが設定用しきい値Ms1未満のときには、左右後輪で制動力差を発生させて、車両に当該目標ヨーモーメントMsを付与し、また、目標ヨーモーメントMsが設定用しきい値Ms1以上のときには、前後左右輪で制動力差を発生させて、車両に当該目標ヨーモーメントMsを付与する。
また、逸脱判断フラグFoutがONからOFFになる場合とは、逸脱傾向がある場合に、逸脱回避のための制動制御が実施されたり、或いは運転者自身が回避操作をしたようなときである。
さらに、前記第1逸脱判断しきい値Ts未満の第2逸脱判断しきい値Tr(Ts>Tr>0)を定義して、この第2逸脱判断しきい値Trよりも逸脱予測時間Toutが小さくなったときに、逸脱回避用ヨー制御に加えて、車両を減速させるための制動制御(以下、逸脱回避用減速制御という。)を行う。この逸脱回避用減速制御は、左右両車輪に同程度の制動力を与えて行う。
さらに、この場合、逸脱予測時間Toutが0になったときに、逸脱回避用ヨー制御に加えて、逸脱回避用減速制御を行う。
なお、この第3のケースの場合において、前記第2のケースと同様に、第2逸脱判断しきい値Trよりも逸脱予測時間Toutが小さくなったときにも、車両を減速させるための制動制御(逸脱回避用減速制御)を行ってもよい。この場合、例えば、逸脱予測時間Toutが0になったときに、逸脱回避用減速制御による自車両の減速度をさらに大きくする。これにより、第2逸脱判断しきい値Trよりも逸脱予測時間Toutが小さくなったとき、さらには逸脱予測時間Toutが0になったときに、逸脱回避用減速制御が作動するようになる。そして、この場合、逸脱予測時間Toutが0になったときに、より自車両の減速度が大きくなる。
例えば、前記第1のケース〜第3のケースの場合における逸脱回避用ヨー制御では、下記(11)式により各車輪の目標制動液圧Psi(i=fl,fr,rl,rr)を算出する。
Psfl=Pmf
Psfr=Pmf+ΔPsf
Psrl=Pmr
Psrr=Pmr+ΔPsr
・・・(11)
Psfl=Pmf+Pgf/2
Psfr=Pmf+ΔPsf+Pgf/2
Psrl=Pmr+Pgr/2
Psrr=Pmr+ΔPsr+Pgr/2
・・・(12)
また、この(11)式及び(12)式が示すように、運転者による減速操作、すなわちマスタシリンダ液圧Pmf,Pmrを考慮して各車輪の目標制動液圧Psi(i=fl,fr,rl,rr)を算出している。
以上のような車線逸脱防止装置は概略として次のように動作する。
先ず、各センサやコントローラ、コントロールユニットから各種データを読み込む(前記ステップS1)。続いて車速Vを算出する(前記ステップS2)。
続いて、走行環境を判定して、安全度が低い方向(第1障害物等存在方向Sout)を決定する(前記ステップS3、図3)。例えば、前記図4において左側車線を自車両100Aが走行している場合、第1障害物等存在方向Soutを左方向にする、といったようにである。
さらに、そのようにして得た逸脱方向Doutと方向スイッチ信号が示す方向(ウインカ点灯側)とに基づいて運転者の車線変更の意図を判定する(前記ステップS5)。
例えば、方向スイッチ信号が示す方向(ウインカ点灯側)と逸脱方向Doutが示す方向とが同じである場合、運転者が意識的に車線変更していると判定する。この場合、逸脱判断フラグFoutをOFFに変更する。
さらに、横変位Xと前記変化量dxとに基づいて目標ヨーモーメントMsを算出し(前記ステップS7)、また、逸脱回避用の減速度を算出する(前記ステップS8)。
そして、前記逸脱判断フラグFout、舵角方向及び逸脱回避方向に基づいて各車輪の目標制動液圧Psi(i=fl,fr,rl,rr)を算出している(ステップS9〜ステップS12)。
ここで、前記第1のケース〜第3ケースの場合において、制動制御を行った場合の車両挙動を図10及び図11を用いて説明する。
なお、図10及び図11中、黒塗りしている車輪は、液圧を発生させて制動力が与えられている車輪を示す。すなわち、左右車輪のうちのいずれか一方が黒塗りの車輪の場合、左右車輪で液圧或いは制動力に差がある。この場合、車両にヨーモーメントが付与されることを示す。また、左右車輪が黒塗りの車輪の場合でも、その液圧値に差があるときもあり、この場合には、車両にヨーモーメントが付与されつつ、同時に当該車両が減速制御されていることを示す。このような関係は以降の図面でも同様である。
ここで、以上の第1〜第3のケースで行う逸脱回避のための制御は、逸脱判断フラグFoutがONで、かつ舵角方向と逸脱回避方向とが不一致であることが条件になる。一方、逸脱判断フラグFoutがOFFの場合には、または逸脱判断フラグFoutがONでも舵角方向と逸脱回避方向とが一致している場合には、そのような逸脱回避のための制御は行われない。
前述したように、運転者の操舵操作による舵角方向と逸脱回避方向(逸脱方向Doutの逆方向)とが一致している場合、逸脱回避のための制御を抑制、具体的には実施しないようにしている。そして、この場合、その運転者の操舵操作による舵角方向となるように、車両にヨーモーメントが付与される。これにより、運転者の操舵操作による車両へのヨーモーメントに、逸脱回避のためのヨーモーメントが加わってしまい、必要以上に車両にヨーモーメントが作用してしまうことを防止できる。これにより、逸脱回避のための制御が運転者に違和感を与えてしまうことを防止できる。
前記第1の実施の形態では、舵角方向と逸脱回避方向とが一致している場合、逸脱回避のための制御を介入させないようにしている。これに対して、第2の実施の形態では、舵角方向と逸脱回避方向とが一致している場合でも、逸脱回避のための制御を介入させるようにしている。具体的には、操舵により発生するヨーモーメントの大きさを考慮して、逸脱回避のための制御を介入させている。これを実現すべく、第2の実施の形態では、前記第1の実施の形態と、制駆動力コントロールユニット8の処理内容を異ならせている。
制駆動力コントロールユニット8で行う演算処理手順は図12に示すようになる。演算処理手順は、前記第1の実施の形態の演算処理手順とほぼ同じであり、特に異なる部分について説明する。
すなわち、ステップS1〜ステップS9において、前記第1の実施の形態と同様に、各種データの読み込み、車速の算出、走行環境の判定、車線逸脱傾向の判定、運転者の意図の判定、制御方法の決定、目標ヨーモーメントの算出及び逸脱回避用の減速度の算出を行う。そして、ステップS9において逸脱判断フラグFoutがONか否かを判定し、逸脱判断フラグFoutがONの場合、ステップS41に進み、逸脱判断フラグFoutがOFFの場合、前記ステップS12に進む。
続いてステップS43において、前記ステップS42で算出した操舵ヨーモーメントMhと前記ステップS7で算出した目標ヨーモーメントMsとを比較する。ここで、操舵ヨーモーメントMhが目標ヨーモーメントMs以上の場合、前記ステップS12に進み、操舵ヨーモーメントMhが目標ヨーモーメントMs未満の場合、ステップS44に進む。
続いてステップS11において、逸脱回避用ヨー制御により車両に付与するヨーモーメントが前記最終目標ヨーモーメントMs´になるように、各輪の目標制動液圧Psi(i=fl,fr,rl,rr)を算出する(前記(11)式及び(12)式参照)。
なお、前記ステップS12では、各車輪の目標制動液圧Psi(i=fl,fr,rl,rr)をマスタシリンダ液圧Pmf,Pmrにする(前記(5)式及び(6)式参照)。
また、逸脱判断フラグFoutがONの場合でも、操舵ヨーモーメントMhが目標ヨーモーメントMs以上のときには、逸脱回避用ヨー制御を行わないようにしている。この場合、運転者の操舵操作に基づくヨーモーメントのみが車両に付与される(前記ステップS43、ステップS12)。
前述したように、逸脱判断フラグFoutがONの場合において、舵角方向と逸脱回避方向(逸脱方向Doutの逆方向)とが一致し、かつ操舵ヨーモーメントMhが目標ヨーモーメントMs未満のときには、前記目標ヨーモーメントMsと操舵ヨーモーメントMhとの差分(Ms−Mh)により最終目標ヨーモーメントMs´を算出して(前記ステップS41〜ステップS44)、この最終目標ヨーモーメントMs´になるように逸脱回避用ヨー制御を行っている(前記ステップS11)。これにより、運転者の操舵操作に基づくヨーモーメントと、逸脱回避のための最終目標ヨーモーメントMs´とを同時に車両に付与している。
また、運転者の操舵操作に基づくヨーモーメントと、逸脱回避のための最終目標ヨーモーメントMs´との和は目標ヨーモーメントMsになる。すなわち、最適条件で逸脱を回避できるヨーモーメントになる。これにより、車両が最適に動作して、逸脱を回避できるようになる。言い換えれば、運転者の操舵操作を補うように逸脱回避用ヨー制御を介入させて、最適に動作させて逸脱を回避させることができる。またこの結果、逸脱回避用ヨー制御が介入するが、その介入が運転者に違和感を与えることもない。
図10や図11を用いて説明もしたが、図13中(A)に示すように、原則として、逸脱傾向がある場合には、その逸脱を回避するように逸脱回避用ヨー制御が作動する。
この第3の実施の形態では、ステアリングホイールによる操舵操作があった場合のその舵角速度に基づいて逸脱回避のための制御を介入させるか否かを決定している。これを実現すべく、第3の実施の形態では、前記第1や第2の実施の形態と、制駆動力コントロールユニット8の処理内容を異ならせている。
制駆動力コントロールユニット8で行う演算処理手順は図14に示すようになる。演算処理手順は、前記第1の実施の形態の演算処理手順とほぼ同じであり、特に異なる部分について説明する。
ステップS11では、前記ステップS6で第1障害物等存在方向Sout及び逸脱方向Doutに基づいて決定した制動制御方法を実現するための各車輪の目標制動液圧Psi(i=fl,fr,rl,rr)を算出する。一方、ステップS12では、各車輪の目標制動液圧Psi(i=fl,fr,rl,rr)をマスタシリンダ液圧Pmf,Pmrする。そして、このように各条件に応じて算出した目標制動液圧Psi(i=fl,fr,rl,rr)を制動流体圧指令値として制動流体圧制御部7に出力している。制動流体圧制御部7では、制動流体圧指令値に基づいて、各ホイールシリンダ6FL〜6RRの制動流体圧を個別に制御する。
前述したように、舵角速度δ´が所定のしきい値δc´より大きい場合、逸脱回避のための制御を介入させないようにしている(前記ステップS51、ステップS12)。ここで逸脱回避のための制御は、逸脱回避用ヨー制御や逸脱回避用減速制御である。
このようにすることで、前記第1の実施の形態と同様に、運転者が所定の操舵操作をしている場合には、必要以上に逸脱回避用ヨー制御や逸脱回避用減速制御を作動させないようにしている。これにより、逸脱回避のための制御が運転者に違和感を与えてしまうことを防止できる。
すなわち、前述の実施の形態では、逸脱を回避するためのヨーモーメントが車両に付与されるように制動制御(逸脱回避用ヨー制御)、逸脱を回避するために減速させるための制動制御(逸脱回避用減速制御)との組み合わせ方法、その作動順序、その制御量(ヨーモーメントの大きさ、減速度の大きさ)を具体的に説明した。しかし、これに限定されないことはいうまでもない。
また、前述の実施の形態では、運転者の車線変更の意図を操舵角δやその操舵角の変化量Δδに基づいて得ている(前記ステップS5参照)。しかし、運転者の車線変更の意図を他の手法により得るようにしてもよい。例えば、操舵トルクに基づいて運転者の車線変更の意図を得てもよい。
Ms=K3・φ+K4・X+K5・β ・・・(13)
ここで、K3,K4,K5は車速Vに応じて変動するゲインである。
Pgf=Kgv・V+Kgφ・φ+Kgβ・β ・・・(14)
ここで、Kgφ,Kgβはそれぞれ、ヨー角φ及び走行車線曲率βに基づいて設定する、制動力を制動液圧に換算するための換算係数である。
△Psf=2・Kbf・Ms/T ・・・(15)
また、制動力コントロールユニット8による前記図12に示すステップS42は、前記操舵により自車両に発生するヨーモーメントを算出する操舵ヨーモーメント算出手段を実現している。
7 制動流体圧制御部
8 制駆動力コントロールユニット
9 エンジン
12 駆動トルクコントロールユニット
13 撮像部
15 ナビゲーション装置
17 マスタシリンダ圧センサ
18 アクセル開度センサ
19 操舵角センサ
22FL〜22RR 車輪速度センサ
Claims (4)
- 操舵状態を検出する操舵状態検出手段と、
走行車線からの自車両の逸脱傾向を検出する逸脱傾向検出手段と、
前記逸脱傾向検出手段が検出した前記逸脱傾向に基づいて、ヨーモーメント分担量及び減速分担量を設定する設定手段と、
前記設定手段が設定した前記ヨーモーメント分担量に基づいて、自車両の走行車線からの逸脱を回避するための目標ヨーモーメントを算出する目標ヨーモーメント算出手段と、
前記設定手段が設定した前記減速分担量に基づいて減速制御量を算出する減速制御量算出手段と、
前記逸脱傾向検出手段が前記逸脱傾向を検出したときに、前記目標ヨーモーメント算出手段が算出した前記目標ヨーモーメントと前記減速制御量算出手段が算出した前記減速制御量とに基づいて各車輪の制動力を制御する制動力制御手段と、
前記操舵状態検出手段が検出した操舵状態に基づいて、前記制動力制御手段の制御内容を変更する変更手段と、を備え、
前記制動力制御手段は、前記目標ヨーモーメントに基づいて、自車両に車線逸脱を回避する方向のヨーモーメントが付与されるように左右輪の制動力を調整して左右輪に制動力差を発生させるとともに、前記減速制御量に基づいて、自車両が減速するように左右輪の制動力を調整して左右輪に等分の制動力を発生させるように前記各車輪の制動力を制御し、
前記変更手段は、前記操舵状態としての操舵速度が所定のしきい値より大きい場合、前記制動力制御手段の制御内容を変更することとして、前記減速制御量算出手段によって算出された前記減速制御量を減少させることを特徴とする車線逸脱防止装置。 - 前記変更手段は、前記操舵状態としての操舵方向が、走行車線からの自車両の逸脱を回避する方向の場合、前記制動力制御手段の制御内容を変更することとして、前記ヨーモーメントを小さい値に変更することを特徴とする請求項1に記載の車線逸脱防止装置。
- 前記操舵により自車両に発生するヨーモーメントを算出する操舵ヨーモーメント算出手段を備え、
前記変更手段は、前記操舵状態としての操舵方向が、走行車線からの自車両の逸脱を回避する方向の場合、前記制動力制御手段の制御内容を変更することとして、前記左右輪の制動力を調整して自車両に付与するヨーモーメントを変更して、前記操舵ヨーモーメント算出手段が算出したヨーモーメントと前記左右輪の制動力を調整して自車両に付与するヨーモーメントとの加算値を所定値にすること特徴とする請求項1又は2に記載の車線逸脱防止装置。 - 前記変更手段は、前記操舵状態としての操舵速度が所定のしきい値より大きい場合、前記制動力制御手段の制御内容を変更することとして、前記ヨーモーメントを小さい値に変更することを特徴とする請求項1乃至3のいずれか1項に記載の車線逸脱防止装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003369447A JP4496758B2 (ja) | 2003-10-29 | 2003-10-29 | 車線逸脱防止装置 |
| US10/960,706 US7212901B2 (en) | 2003-10-29 | 2004-10-08 | Lane departure prevention apparatus |
| EP04256471A EP1527972B1 (en) | 2003-10-29 | 2004-10-20 | Lane departure prevention apparatus |
| DE602004006577T DE602004006577T2 (de) | 2003-10-29 | 2004-10-20 | System zur Spurhaltung eines Kraftfahrzeugs |
| KR1020040086408A KR100596607B1 (ko) | 2003-10-29 | 2004-10-28 | 차선 이탈 방지 장치 |
| CNB2004100896896A CN100540371C (zh) | 2003-10-29 | 2004-10-29 | 车道偏离预防设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003369447A JP4496758B2 (ja) | 2003-10-29 | 2003-10-29 | 車線逸脱防止装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005132182A JP2005132182A (ja) | 2005-05-26 |
| JP4496758B2 true JP4496758B2 (ja) | 2010-07-07 |
Family
ID=34646801
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003369447A Expired - Lifetime JP4496758B2 (ja) | 2003-10-29 | 2003-10-29 | 車線逸脱防止装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4496758B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4899680B2 (ja) * | 2006-07-18 | 2012-03-21 | 日産自動車株式会社 | 車線逸脱防止装置 |
| JP5355209B2 (ja) * | 2009-05-01 | 2013-11-27 | アルパイン株式会社 | ナビゲーション装置、自車の走行車線の判定方法および判定プログラム |
| JP2016192166A (ja) * | 2015-03-31 | 2016-11-10 | 株式会社デンソー | 車両制御装置、及び車両制御方法 |
| JP7226160B2 (ja) * | 2019-07-16 | 2023-02-21 | トヨタ自動車株式会社 | 車両走行制御装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1129016A (ja) * | 1997-07-10 | 1999-02-02 | Aisin Seiki Co Ltd | 進行方向補正装置 |
| JP3690123B2 (ja) * | 1998-07-16 | 2005-08-31 | 三菱自動車工業株式会社 | 車線逸脱防止装置 |
| JP3853991B2 (ja) * | 1998-11-04 | 2006-12-06 | 本田技研工業株式会社 | 車両の走行安全装置 |
| JP3680249B2 (ja) * | 1999-03-19 | 2005-08-10 | トヨタ自動車株式会社 | 横滑りによる車線逸脱量低減自動制御システム |
| JP2001310719A (ja) * | 2000-04-27 | 2001-11-06 | Nissan Motor Co Ltd | 車線逸脱防止装置 |
| JP3760827B2 (ja) * | 2001-09-28 | 2006-03-29 | 日産自動車株式会社 | 車線逸脱防止装置 |
-
2003
- 2003-10-29 JP JP2003369447A patent/JP4496758B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005132182A (ja) | 2005-05-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4496759B2 (ja) | 車線逸脱防止装置 | |
| JP4496760B2 (ja) | 車線逸脱防止装置 | |
| CN100540371C (zh) | 车道偏离预防设备 | |
| JP4867313B2 (ja) | 車線逸脱防止装置 | |
| JP4650362B2 (ja) | 車線逸脱防止装置 | |
| US20050107939A1 (en) | Lane departure prevention apparatus | |
| JP2005162044A (ja) | 車線逸脱防止装置 | |
| JP4692609B2 (ja) | 車線逸脱防止装置 | |
| JP4380301B2 (ja) | 車線逸脱防止装置 | |
| JP4259290B2 (ja) | 車線逸脱防止装置 | |
| JP4678121B2 (ja) | 車線逸脱防止装置 | |
| JP4461780B2 (ja) | 車線逸脱防止装置 | |
| JP2006182129A (ja) | 車線逸脱防止装置 | |
| JP4496758B2 (ja) | 車線逸脱防止装置 | |
| JP2007030696A (ja) | 運転者車線変更意思判定方法及び車線逸脱防止装置 | |
| JP4396236B2 (ja) | 車線逸脱防止装置 | |
| JP4367101B2 (ja) | 車線逸脱防止装置 | |
| JP4475180B2 (ja) | 車両の走行制御装置 | |
| JP4581680B2 (ja) | 車線逸脱防止装置 | |
| JP4765435B2 (ja) | 車両の走行制御装置 | |
| JP4396223B2 (ja) | 車線逸脱防止装置 | |
| JP4600038B2 (ja) | 車線逸脱防止方法及びその装置 | |
| JP4380302B2 (ja) | 車線逸脱防止装置 | |
| JP4894436B2 (ja) | 車線逸脱防止装置 | |
| JP2007230529A (ja) | 車線逸脱防止装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061023 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20081112 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081202 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090113 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090929 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091127 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100323 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100405 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130423 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4496758 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130423 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140423 Year of fee payment: 4 |
|
| EXPY | Cancellation because of completion of term |