JP4396236B2 - 車線逸脱防止装置 - Google Patents
車線逸脱防止装置 Download PDFInfo
- Publication number
- JP4396236B2 JP4396236B2 JP2003388208A JP2003388208A JP4396236B2 JP 4396236 B2 JP4396236 B2 JP 4396236B2 JP 2003388208 A JP2003388208 A JP 2003388208A JP 2003388208 A JP2003388208 A JP 2003388208A JP 4396236 B2 JP4396236 B2 JP 4396236B2
- Authority
- JP
- Japan
- Prior art keywords
- departure
- road surface
- vehicle
- control
- lane
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 230000002265 prevention Effects 0.000 title claims description 13
- 238000011144 upstream manufacturing Methods 0.000 claims description 6
- 230000003111 delayed effect Effects 0.000 claims description 2
- 230000001133 acceleration Effects 0.000 description 57
- 239000012530 fluid Substances 0.000 description 34
- 238000000034 method Methods 0.000 description 27
- 238000006073 displacement reaction Methods 0.000 description 13
- 238000003384 imaging method Methods 0.000 description 10
- 238000012545 processing Methods 0.000 description 8
- 238000006243 chemical reaction Methods 0.000 description 6
- 101100109110 Danio rerio aph1b gene Proteins 0.000 description 3
- 230000001174 ascending effect Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000013507 mapping Methods 0.000 description 2
- 239000003550 marker Substances 0.000 description 2
- 230000006854 communication Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000002783 friction material Substances 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000010248 power generation Methods 0.000 description 1
- 230000001172 regenerating effect Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/08—Lane monitoring; Lane Keeping Systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/08—Lane monitoring; Lane Keeping Systems
- B60T2201/089—Lane monitoring; Lane Keeping Systems using optical detection
Description
そこで、本発明は、前述の問題に鑑みてなされたものであり、車線逸脱回避のための制御を最適に行うことができる車線逸脱防止装置の提供を目的とする。
前述の問題を解決するために、本発明に係る車線逸脱防止装置は、逸脱回避制御手段により、走行車線の路面カントの有無及び路面カントの勾配の方向を検出し、路面カントの下り側に自車両が逸脱する傾向が有る場合、逸脱回避のための制御の開始タイミングを路面カントが無い場合よりも早くし、前記路面カントの上り側に自車両が逸脱する傾向が有る場合、前記逸脱回避のための制御の開始タイミングを前記路面カントが無い場合よりも遅くして、走行車線からの自車両の逸脱を回避する。
このように本発明に係る車線逸脱防止装置は、走行車線の路面カントに基づく開始タイミングで逸脱回避のための制御を開始する。
ここで、逸脱回避のための制御とは、車輪の制動力を調整して、車両にヨーモーメントを付与する制御や車両を減速させる制御である。
この実施の形態は、本発明の車線逸脱防止装置を搭載した後輪駆動車両である。この後輪駆動車両は、自動変速機とコンベンショナルディファレンシャルギヤとを搭載し、前後輪とも左右輪の制動力を独立制御可能な制動装置を搭載している。
図1は、第1の実施の形態の車線逸脱防止装置を備えた車両を示す概略構成図である。
また、この車両には、画像処理機能付きの撮像部13が設けられている。撮像部13は、自車両の車線逸脱傾向検出用に走行車線内の自車両の位置を検出するためのものである。例えば、撮像部13は、CCD(Charge Coupled Device)カメラからなる単眼カメラで撮像するように構成されている。この撮像部13は車両前部に設置されている。
次に、制駆動力コントロールユニット8で行う演算処理手順について、図2を用いて説明する。この演算処理は、例えば10msec.毎の所定サンプリング時間ΔT毎にタイマ割込によって実行される。なお、この図2に示す処理内には通信処理を設けていないが、演算処理によって得られた情報は随時記憶装置に更新記憶されると共に、必要な情報は随時記憶装置から読出される。
前輪駆動の場合
V=(Vwrl+Vwrr)/2
後輪駆動の場合
V=(Vwfl+Vwfr)/2
・・・(1)
ここで、Vwfl,Vwfrは左右前輪それぞれの車輪速度であり、Vwrl,Vwrrは左右後輪それぞれの車輪速度である。すなわち、この(1)式では、従動輪の車輪速の平均値として車速Vを算出している。なお、本実施の形態では、後輪駆動の車両であるので、後者の式、すなわち前輪の車輪速度により車速Vを算出する。
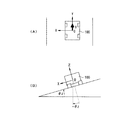
続いてステップS3において、路面カントを検出する。具体的には、前記ステップS1で得た前後加速度Yg、横加速度Xg、上下加速度Zg及びヨー角φ並びに前記ステップS2で得た車速Vに基づいて路面カントの角度θzを検出する。なお、図3は、車両座標系XYZと路面カントの角度θzとの関係を示す。ここで、図3中(A)は車両100を上方からみた図であり、図3中(B)は車両100を後方からみた図である。
また、前後加速度Yg、横加速度Xg、上下加速度Zg、ヨー角φ及び車速Vと路面カントの角度θzとの関係を予めマッピングデータとして取得しておいて、実際の検出時には、そのマッピングデータを参照して、実際の測定で得た前後加速度Yg、横加速度Xg、上下加速度Zg、ヨー角φ及び車速Vから路面カントの角度θzを得ることもできる。
先ずステップS41において、逸脱予測時間Toutを算出する。具体的には、dxを前記横変位Xの変化量(単位時間当たりの変化量)とし、Lを車線幅とし、横変位Xを用いて、下記(2)式により逸脱予測時間Toutを算出する(X,dx,Lの値については図5を参照)。
Tout=(L/2−X)/dx ・・・(2)
この(2)式によれば、車線中央(X=0)からXだけ横変位している車両100が、その位置から距離L/2だけ離れた外側位置領域(例えば路肩)に至るまでの逸脱予測時間Toutを求めることができる。
なお、車線幅Lについては、撮像部13が撮像画像を処理することで得ている。また、ナビゲーション装置15から車両の位置を得たり、ナビゲーション装置15の地図データから車線幅Lを得てもよい。
また、横加速度Xgを用いて逸脱方向Doutを判定してもよい。例えば、横加速度Xgが0より大きい場合(Xg>0)、当該加速度Xgを左方向への加速度とし、横加速度Xgが0より小さい場合(Xg<0)、当該加速度Xgを右方向への加速度とする。この関係より、横加速度Xgが0より大きい場合(Xg>0)、左方向に加速度しているので、その方向を逸脱方向Doutにし(Dout=left)、横加速度Xgが0より小さい場合(Xg<0)、右方向に加速度しているので、その方向を逸脱方向Doutにする(Dout=right)。
続いてステップS5において、運転者の車線変更の意図を判定する。具体的には、前記ステップS1で得た方向スイッチ信号及び操舵角δに基づいて、次のように運転者の車線変更の意図を判定する。
方向スイッチ信号が示す方向(ウインカ点灯側)と、前記ステップS4で得た逸脱方向Doutが示す方向とが同じである場合、運転者が意識的に車線変更していると判定し、逸脱判断フラグFoutをOFFに変更する(Fout=OFF)。すなわち、逸脱しないとの判定結果に変更する。
また、方向指示スイッチ20が操作されていない場合には、操舵角δに基づいて運転者の車線変更の意図を判定する。すなわち、運転者が逸脱方向に操舵している場合において、その操舵角δ及びその操舵角の変化量(単位時間当たりの変化量)Δδが設定値以上のときには、運転者が意識的に車線変更していると判定し、逸脱判断フラグFoutをOFFに変更する(Fout=OFF)。
ここでは、前記ステップS3で得た路面カントの角度θz、ステップS4で得た逸脱方向Dout及びステップS5で得た逸脱判断フラグFoutに基づいて、逸脱回避のための制御内容を決定する。
例えば、逸脱判断フラグFoutがON(Tout<Ts)になっている場合、逸脱の警報を実施する。例えば、音や表示等により警報を行う。そして、逸脱判断フラグFoutがON(Tout<Ts)になっている場合、さらに路面カントの角度θz及び逸脱方向Doutに基づいて、逸脱回避の制動制御方法を決定する。これについては、後で詳述する。
具体的には、前記ステップS1で得た横変位Xと前記変化量dxとに基づいて、下記(3)式により目標ヨーモーメントMsを算出する。
Ms=K1・X+K2・dx ・・・(3)
ここで、K1,K2は車速Vに応じて変動するゲインである。例えば、図6はその例を示す。この図6に示すように、例えばゲインK1,K2は、低速域で小さい値になり、車速Vがある値になると、車速Vの増加に対応して大きくなり、その後ある車速Vに達すると一定値になる。
Pgf=Kgv・V+Kgx・dx ・・・(4)
ここで、Kgv,Kgxはそれぞれ、車速V及び横変化量dxに基づいて設定する、制動力を制動液圧に換算するための換算係数である。例えば、図7はその例を示す。この図7に示すように、例えば換算係数Kgv,Kgxは、低速域で大きい値になり、車速Vがある値になると、車速Vの増加に対応して小さくなり、その後ある車速Vに達すると一定値になる。
このようにステップS8において、逸脱回避用の減速度(具体的には目標制動液圧Pgf,Pgr)を得る。
続いてステップS9において、各車輪の目標制動液圧を算出する。すなわち、逸脱回避の制動制御の有無に基づいて最終的な制動液圧を算出する。具体的には次のように算出する。
Psfl=Psfr=Pmf ・・・(5)
Psrl=Psrr=Pmr ・・・(6)
ここで、Pmfは前輪用のマスタシリンダ液圧である。また、Pmrは後輪用のマスタシリンダ液圧であり、前後配分を考慮して前輪用のマスタシリンダ液圧Pmfに基づいて算出した値になる。
Ms<Ms1の場合
ΔPsf=0 ・・・(7)
ΔPsr=2・Kbr・Ms/T ・・・(8)
Ms≧Ms1の場合
ΔPsf=2・Kbf・(Ms−Ms1)/T ・・・(9)
ΔPsr=2・Kbr・Ms1/T ・・・(10)
ここで、Ms1は設定用しきい値を示す。また、Tはトレッドを示す。なお、このトレッドTは、簡単のため前後で同じ値にする。また、Kbf,Kbrは、制動力を制動液圧に換算する場合の前輪及び後輪についての換算係数であり、ブレーキ諸元により定まる。
前記ステップS6では、逸脱判断フラグFoutがONの場合において、前記路面カントの角度θz及び逸脱方向Doutに基づいて制動制御方法を決定している。
前述したように、横加速度Xgを用いて逸脱方向Doutを判定することができる。すなわち、横加速度Xgが0より大きい場合(Xg>0)、左方向を逸脱方向Doutとし(Dout=left)、横加速度Xgが0より小さい場合(Xg<0)、右方向を逸脱方向Doutとする(Dout=right)。このような関係から、路面カントの角度θzが0より大きく(θz>0)、かつ横加速度Xgが0より大きい場合(Xg>0)、又は路面カントの角度θzが0より小さく(θz<0)、かつ横加速度Xgが0より小さい場合(Xg<0)、路面カントの下り側に逸脱していることになる。また、路面カントの角度θzが0より大きく(θz>0)、かつ横加速度Xgが0より小さい場合(Xg<0)、又は路面カントの角度θzが0より小さく(θz<0)、かつ横加速度Xgが0より大きい場合(Xg>0)、路面カントの上り側に逸脱していることになる。
(第1のケース) 路面カントがない場合(θz=0)で、かつ逸脱傾向がある場合、逸脱判断フラグFoutがOFFになるまで、逸脱を回避するためのヨーモーメントが車両に付与されるように制動制御(以下、逸脱回避用ヨー制御という。)と、車両を減速させるための制動制御(以下、逸脱回避用減速制御という。)とを組み合わせて行う。これら逸脱回避のための制御は、逸脱判断フラグFoutがONになったとき(Tout<Ts)、開始する。
また、逸脱判断フラグFoutがONからOFFになる場合とは、逸脱傾向がある場合に、逸脱回避のための制動制御が実施されたり、或いは運転者自身が回避操作をしたようなときである。
この場合、前記第1逸脱判断しきい値Tsに、ある設定量dTkdownを加算した逸脱判断しきい値(Ts+dTkdown)よりも逸脱予測時間Toutが小さくなったとき(Tout<(Ts+dTkdown)、逸脱回避用減速制御を行う。さらに、前記第1逸脱判断しきい値Ts未満の第2逸脱判断しきい値Tr(Ts>Tr>0)を定義して、この第2逸脱判断しきい値Trよりも逸脱予測時間Toutが小さくなったとき(Tout<Tr)、逸脱回避用減速制御に加えて、逸脱回避用ヨー制御を行う。
例えば、前記設定量dTkdownは第1逸脱判断しきい値Ts未満の値である(Ts>dTkdown)。
また、路面カントの角度θzの絶対値が大きいほど、前記設定量dTkdownを大きくする。これにより、路面カントの勾配が大きくなるほど、逸脱回避用減速制御の開始タイミングが早くなる。
この場合、前記第1逸脱判断しきい値Tsから、ある設定量dTkupを引き算した逸脱判断しきい値(Ts−dTkup)よりも逸脱予測時間Toutが小さくなったとき(Tout<(Ts−dTkup)、逸脱回避用ヨー制御を行う。
ここで、前記設定量dTkupは0より大きく、第1逸脱判断しきい値Tsより小さい値である(Ts>dTkup>0)。これにより、逸脱回避用ヨー制御の開始タイミングは、路面カントがない場合よりも遅くなる。
なお、以上の第1乃至第3のケースの説明では、逸脱方向の判断に横加速度Xgを用いているが、逸脱方向の判断に逸脱方向Doutを用いることができることはいうまでもない。
例えば、前記第3のケースの場合における逸脱回避用ヨー制御では、下記(11)式により各車輪の目標制動液圧Psi(i=fl,fr,rl,rr)を算出する。
Psfl=Pmf
Psfr=Pmf+ΔPsf
Psrl=Pmr
Psrr=Pmr+ΔPsr
・・・(11)
Psfl=Pmf+Pgf/2
Psfr=Pmf+ΔPsf+Pgf/2
Psrl=Pmr+Pgr/2
Psrr=Pmr+ΔPsr+Pgr/2
・・・(12)
また、この(11)式及び(12)式が示すように、運転者による減速操作、すなわちマスタシリンダ液圧Pmf,Pmrを考慮して各車輪の目標制動液圧Psi(i=fl,fr,rl,rr)を算出している。
以上が、制駆動力コントロールユニット8による演算処理である。そして、制駆動力コントロールユニット8は、前記ステップS9で算出した各車輪の目標制動液圧Psi(i=fl,fr,rl,rr)を制動流体圧指令値として、制動流体圧制御部7に出力する。
先ず、各センサやコントローラ、コントロールユニットから各種データを読み込む(前記ステップS1)。続いて車速Vを算出する(前記ステップS2)。
続いて路面カントを検出する(前記ステップS3)。具体的には、路面カントの角度θzを参照して、路面カントの角度θzが0より大きい場合(θz>0)、車両からみて左方向が下り側となる路面カントを検出し、路面カントの角度θzが0より小さい場合(θz<0)、車両からみて右方向が下り側となる路面カントを検出し、路面カントの角度θzが0の場合(θz=0)、路面にカントがないことを検出する。
また、そのようにして得た逸脱方向Doutと方向スイッチ信号が示す方向(ウインカ点灯側)とに基づいて運転者の車線変更の意図を判定する(前記ステップS5)。
例えば、方向スイッチ信号が示す方向(ウインカ点灯側)と逸脱方向Doutが示す方向とが同じである場合、運転者が意識的に車線変更していると判定する。この場合、逸脱判断フラグFoutをOFFに変更する。
さらに、横変位Xと前記変化量dxとに基づいて目標ヨーモーメントMsを算出し(前記ステップS7)、また、逸脱回避用の減速度を算出する(前記ステップS8)。
前述したように、路面カントの下り側に逸脱傾向がある場合、前記逸脱判断しきい値(Ts+dTkdown)よりも逸脱予測時間Toutが小さくなったとき(Tout<(Ts+dTkdown)、逸脱回避用減速制御を行っている。そして、その制御開始タイミングは、路面カントがない場合よりも設定量dTkdown分だけ早くなっている。
また、前述したように、路面カントの上り側に逸脱傾向がある場合、前記逸脱判断しきい値(Ts−dTkup)よりも逸脱予測時間Toutが小さくなったとき(Tout<(Ts−dTkup)、逸脱回避用ヨー制御を行っている。そして、その制御開始タイミングは、路面カントがない場合よりも遅くなっている。
以上、本発明の実施の形態について説明した。しかし、本発明は、前述の実施の形態として実現されることに限定されるものではない。
また、前述の実施の形態では、運転者の車線変更の意図を操舵角δやその操舵角の変化量Δδに基づいて得ている(前記ステップS5参照)。しかし、運転者の車線変更の意図を他の手法により得るようにしてもよい。例えば、操舵トルクに基づいて運転者の車線変更の意図を得てもよい。
Ms=K3・φ+K4・X+K5・β ・・・(13)
ここで、K3,K4,K5は車速Vに応じて変動するゲインである。
Pgf=Kgv・V+Kgφ・φ+Kgβ・β ・・・(14)
ここで、Kgφ,Kgβはそれぞれ、ヨー角φ及び走行車線曲率βに基づいて設定する、制動力を制動液圧に換算するための換算係数である。
△Psf=2・Kbf・Ms/T ・・・(15)
7 制動流体圧制御部
8 制駆動力コントロールユニット
9 エンジン
12 駆動トルクコントロールユニット
13 撮像部
15 ナビゲーション装置
17 マスタシリンダ圧センサ
18 アクセル開度センサ
19 操舵角センサ
22FL〜22RR 車輪速度センサ
Claims (2)
-
自車両が予め定められた所定時間以内に走行車線を逸脱するか否かを予測し、自車両が予め定められた所定時間以内に走行車線を逸脱すると予測される場合に逸脱傾向が有ると判定する車線逸脱判定手段と、
前記車線逸脱判定手段が逸脱傾向が有ると判定した場合に、逸脱回避のための制御を行う逸脱回避制御手段と、を備え、
前記逸脱回避制御手段は、走行車線の路面カントの有無及び路面カントの勾配の方向を検出し、前記路面カントの下り側に自車両が逸脱する傾向が有る場合、前記逸脱回避のための制御の開始タイミングを前記路面カントが無い場合よりも早くし、前記路面カントの上り側に自車両が逸脱する傾向が有る場合、前記逸脱回避のための制御の開始タイミングを前記路面カントが無い場合よりも遅くすること
を特徴とする車線逸脱防止装置。 - 前記逸脱回避制御手段は、車輪への制動力を制御して、自車両にヨーモーメントを付与するか、又は、自車両を減速させることで、走行車線からの逸脱回避のための制御を行うことを特徴とする請求項1に記載の車線逸脱防止装置。
Priority Applications (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003388208A JP4396236B2 (ja) | 2003-11-18 | 2003-11-18 | 車線逸脱防止装置 |
| US10/960,724 US7444224B2 (en) | 2003-11-14 | 2004-10-08 | Lane departure prevention apparatus |
| DE602004014423T DE602004014423D1 (de) | 2003-11-14 | 2004-10-20 | System zur Spurhaltung eines Fahrzeugs |
| EP04256470A EP1531102B1 (en) | 2003-11-14 | 2004-10-20 | Lane departure prevention apparatus |
| DE602004010352T DE602004010352T2 (de) | 2003-11-14 | 2004-10-20 | System zur Spurhaltung eines Fahrzeugs |
| EP07005133A EP1790542B2 (en) | 2003-11-14 | 2004-10-20 | Lane departure prevention apparatus |
| KR1020040092259A KR100668556B1 (ko) | 2003-11-14 | 2004-11-12 | 차선 이탈 방지 장치 |
| CN2007101808330A CN101172482B (zh) | 2003-11-14 | 2004-11-12 | 车道偏离防止设备 |
| CNB2004100929917A CN100381314C (zh) | 2003-11-14 | 2004-11-12 | 车道偏离防止设备及车道偏离防止方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003388208A JP4396236B2 (ja) | 2003-11-18 | 2003-11-18 | 車線逸脱防止装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005145336A JP2005145336A (ja) | 2005-06-09 |
| JP4396236B2 true JP4396236B2 (ja) | 2010-01-13 |
Family
ID=34695350
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003388208A Expired - Lifetime JP4396236B2 (ja) | 2003-11-14 | 2003-11-18 | 車線逸脱防止装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4396236B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007168592A (ja) * | 2005-12-21 | 2007-07-05 | Toyota Motor Corp | 道路傾き検出装置 |
| JP4770501B2 (ja) * | 2006-02-08 | 2011-09-14 | 日産自動車株式会社 | 車両挙動制御装置および車両挙動制御方法 |
| DE102010055136A1 (de) * | 2010-12-18 | 2012-07-05 | Audi Ag | Verfahren zum Betrieb eines querführenden Fahrerassistenzsystems eines Kraftfahrzeugs und Kraftfahrzeug |
| JP5947849B2 (ja) | 2014-09-17 | 2016-07-06 | 富士重工業株式会社 | 車両の車線逸脱防止制御装置 |
| US20220126823A1 (en) * | 2020-10-23 | 2022-04-28 | GM Global Technology Operations LLC | Monotonic path tracking control for lane keeping and lane following |
-
2003
- 2003-11-18 JP JP2003388208A patent/JP4396236B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005145336A (ja) | 2005-06-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4496760B2 (ja) | 車線逸脱防止装置 | |
| JP4577013B2 (ja) | 車線逸脱防止装置 | |
| JP4752311B2 (ja) | 車線逸脱防止装置 | |
| JP4457891B2 (ja) | 車線逸脱防止装置 | |
| JP4650362B2 (ja) | 車線逸脱防止装置 | |
| JP4496759B2 (ja) | 車線逸脱防止装置 | |
| JP4692609B2 (ja) | 車線逸脱防止装置 | |
| JP4380301B2 (ja) | 車線逸脱防止装置 | |
| JP4259290B2 (ja) | 車線逸脱防止装置 | |
| JP4678121B2 (ja) | 車線逸脱防止装置 | |
| JP2006182129A (ja) | 車線逸脱防止装置 | |
| JP4475180B2 (ja) | 車両の走行制御装置 | |
| JP4396236B2 (ja) | 車線逸脱防止装置 | |
| JP4581817B2 (ja) | 車線逸脱防止装置 | |
| JP4367101B2 (ja) | 車線逸脱防止装置 | |
| JP4581680B2 (ja) | 車線逸脱防止装置 | |
| JP4496758B2 (ja) | 車線逸脱防止装置 | |
| JP4600038B2 (ja) | 車線逸脱防止方法及びその装置 | |
| JP3988729B2 (ja) | 車線逸脱防止装置 | |
| JP5256934B2 (ja) | 車線逸脱防止装置及びその方法 | |
| JP4894436B2 (ja) | 車線逸脱防止装置 | |
| JP4983089B2 (ja) | 車線逸脱防止装置 | |
| JP4396223B2 (ja) | 車線逸脱防止装置 | |
| JP4380302B2 (ja) | 車線逸脱防止装置 | |
| JP4492321B2 (ja) | 車線逸脱防止装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061113 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20081023 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090421 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090804 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090831 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090929 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091012 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121030 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4396236 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121030 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131030 Year of fee payment: 4 |