JP4477839B2 - 容器集合方法及び容器集合装置 - Google Patents
容器集合方法及び容器集合装置 Download PDFInfo
- Publication number
- JP4477839B2 JP4477839B2 JP2003192080A JP2003192080A JP4477839B2 JP 4477839 B2 JP4477839 B2 JP 4477839B2 JP 2003192080 A JP2003192080 A JP 2003192080A JP 2003192080 A JP2003192080 A JP 2003192080A JP 4477839 B2 JP4477839 B2 JP 4477839B2
- Authority
- JP
- Japan
- Prior art keywords
- container
- conveyor
- speed
- containers
- side belt
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 28
- 238000011144 upstream manufacturing Methods 0.000 claims description 16
- 238000009434 installation Methods 0.000 claims description 8
- 230000008569 process Effects 0.000 claims description 8
- 230000032258 transport Effects 0.000 claims description 7
- 230000003247 decreasing effect Effects 0.000 claims 2
- 241000332371 Abutilon x hybridum Species 0.000 claims 1
- 230000002776 aggregation Effects 0.000 claims 1
- 238000004220 aggregation Methods 0.000 claims 1
- 230000000694 effects Effects 0.000 description 13
- 238000004519 manufacturing process Methods 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 238000009825 accumulation Methods 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
Images








Landscapes
- Attitude Control For Articles On Conveyors (AREA)
Description
【発明の属する技術分野】
本発明は、上流から複数列で供給される容器群をコンベヤ上で単列化して下流に排出する容器集合方法及び容器集合装置に関するもので、特に空のプラスチック容器等転倒しやすい容器を高速で安定して集合可能な容器集合技術に関する。
【0002】
【従来の技術】
従来からガラスびんや缶等容器群の集合手段として、容器群の供給コンベヤに隣接して配設された複数列の順次高速化する集合コンベヤを利用し、供給コンベヤ及び集合コンベヤ上を斜めに横切って配設した固定ガイド部材により容器群を下流高速側コンベヤに誘導して順次加速し、複数列の容器を単列化する技術が広く利用されている。一方、生産ラインの高能力化とPETびん等のプラスチック容器の普及に伴い、変形しやすく転倒しやすい容器群をコンベヤ上で容器転倒を防止して高能力で集合するための手段として、特許文献1及び特許文献2に示される如くコンベヤ搬送面から容器底面を負圧で吸引しながら容器群を集合する技術が提案されている。
【0003】
しかし、これらバキュームを利用する方法は容器の転倒を防止する観点では優れているが、容器の底とコンベヤ搬送面の吸引力による副次的な抵抗を発生させるため、集合に際して容器の相互の円滑な移動が阻害され、必ずしも容器群の集合手段として優れた機能を発揮することが出来なかった。また、容器集合装置が長大となり、真空関連装置が高価で場所を取るのみならず、ランニングコストや騒音・保守費用の発生を伴う欠点があった。
【0004】
また、特許文献3に示される如く、容器群の供給コンベヤに隣接して配設された複数列の順次加速する集合コンベヤを利用して、供給コンベヤ及び集合コンベヤ上を斜めに横切って配設する固定のガイド部材に替えて駆動された2組のガイドベルトを設けて、ガイドベルトに接触する円柱状の容器の回転を減少させて容器の自転による転倒を防止する手段が提案されている。
【0005】
この技術は複数列の容器群が順次集合されて2列から1列に移行する領域で円柱状の容器の転倒を防止する観点で効果があるが、3列以上などさらに多くの容器群を2列乃至1列に集合する領域での容器集合機能を備えていないため、機能向上の効果は容器が2列乃至1列に集合された以降の領域に限られており、容器集合装置全体としての性能向上は限定的であった。このため、近来の高速ラインにおいて転倒し易い容器を安定して短い距離でかつ高能力で、満足すべき稼動状況で集合することが困難であった。また、円柱状の容器を対象とした技術のため近来利用が増大している角形の容器の集合に対する性能向上への配慮がなされていなかった。
【特許文献1】
特公平3−55373号公報
【特許文献2】
特開平11−59883号公報
【特許文献3】
米国特許第5551551号明細書
【0006】
【発明が解決しようとする課題】
本発明は、上記の課題を解決して供給コンベヤ上から多くの列数の容器がランダム状態で供給される高速ラインにおいても、円柱状の容器のみならず断面基本形状が正方形や長方形の角形の容器にも適用可能で、従来の容器集合装置に較べて短い距離で多数列の容器を転倒させずに集合単列化して下流に供給することの出来る容器集合方法及び容器集合装置を提供するものである。
【0007】
またバキュームを利用する場合に比較して高価な真空関連装置、および真空装置設置用の広い場所を必要とせず、ランニングコストや騒音・保守費用の低減を図って、簡易な構成で安価な容器集合方法及び容器集合装置を提供するものである。さらに取扱い対象の容器及び集合装置の運転能力等の条件変更に対して簡易に対応可能な容器集合方法及び容器集合装置を提供するものである。
【0008】
【課題を解決するための手段】
請求項1に記載の発明は、供給コンベヤから直立状態で接触した状態で供給される複数列の容器を、供給コンベヤに隣接して配設された順次高速化する複数列のコンベヤからなる集合コンベヤに誘導し、容器を順次加速集合し単列化して排出コンベヤにより下流に搬送する容器集合方法において、前記供給コンベヤ及び集合コンベヤ上を斜めに横切って容器を容器の集合開始位置から単列化される過程で誘導する駆動されたサイドベルトを複数配設し、前記複数サイドベルト及び対応する各コンベヤの速度をサイドベルトの速度と該当領域の最高速コンベヤの速度比を上流側から下流側に順次減少させてそれぞれ所定の速度に設定し、サイドベルトに接触する容器を容器より高速で進行するサイドベルトで回転並びに加速することにより、サイドベルトに近い側の容器の進行速度をサイドベルトから離れた側の容器の進行速度と同等以上の進行速度とし、設定された前記各コンベアと対応する前記複数のサイドベルトとの速度比により、サイドベルトから離れた位置の容器をサイドベルトに近い側の容器の後方に前後の容器と接触させながら順次集合させて複数列の容器を単列化することを特徴とする容器集合方法を提供することを要旨とする。
【0009】
請求項2の発明は、請求項1において角形の容器を対象とする際、サイドベルトの進行速度をベルトに接触する容器の進行速度と異なる速度に設定制御してサイドベルトに接触した角形の容器を自転させることにより、サイドベルト近傍の特に面と面が密着して一体に搬送されがちな角形の容器をコンベヤ上で相互に分離して、複数列の容器を効率良く単列化させることを特徴とする容器集合方法を提供することを要旨とする。
【0010】
請求項3の発明は、直立状態で接触した状態の複数列の容器を供給する供給コンベヤと、これに隣接して下流側が順次高速化する複数列のコンベヤからなる集合コンベヤ、及び単列に集合された容器を下流側に搬送する排出コンベヤを備えた容器集合装置において、前記供給コンベヤ及び集合コンベヤ上を斜めに横切って容器を容器の集合開始位置から単列化される過程で誘導するとともに、サイドベルトに接触する容器を回転並びに加速させるための駆動された複数の高速で進行するサイドベルト装置と、前記複数のサイドベルト装置を配設した集合コンベヤ上のそれぞれの部所において、前記複数のサイドベルト及び対応する各コンベヤの速度をサイドベルトの速度と該当領域の最高速コンベヤの速度比を上流側から下流側に順次減少させてサイドベルトに接触する容器を容器より高速で進行するサイドベルトで回転並びに加速することにより、サイドベルトに近い側の容器の進行速度をサイドベルトから離れた側の容器の進行速度と同等以上の速度とし、設定された前記各コンベアと対応する前記複数のサイドベルトとの速度比により、サイドベルトから離れた位置の容器をサイドベルトに近い側の容器の後方に前後の容器と接触させながら順次集合させて複数列の容器を単列化可能ならしめる複数のサイドベルト及び各コンベヤの速度設定手段とを備えたことを特徴とする容器集合装置を提供することを要旨とする。
【0011】
請求項4の発明は、請求項3において、コンベヤを斜めに横切って配設された前記複数サイドベルトのコンベヤ進行方向に対する設置角度を、下流側で順次コンベヤの進行方向に添わせた角度とすることを特徴とする容器集合装置を提供することを要旨とする。
【0012】
請求項5の発明は、請求項3又は4において、複数の前記サイドベルトの進行速度を、各サイドベルトに対応した領域の容器を搬送する最高速コンベヤの進行速度の略1乃至1.6倍とすることを特徴とする容器集合装置を提供することを要旨とする。
【0013】
請求項6の発明は、請求項3乃至5のうちいずれか一項において、容器集合装置の上流側及び下流側の装置並びにコンベヤの稼動状況を示す容器集合装置への制御信号に対応して、前記複数のサイドベルト及び各コンベヤの速度をあらかじめ設定した条件に従って自動的に制御する速度制御手段を備えたことを特徴とする容器集合装置を提供することを要旨とする。
【0014】
【発明の実施の形態】
以下、本発明を具体化した容器集合方法及び容器集合装置の実施例を図1〜9により説明する。図1は本発明に掛かる容器集合装置の実施例を示す平面図、図2は円柱状の容器を集合する実施例としての平面図、図3は図2の一部容器を省略した正面図、図4は図2のX−X断面図、図5は一部容器を省略した図3のY部部分詳細図、図6は円柱状の容器が集合される過程の詳細を示す平面図、図7は角形の容器を集合する状態を示す平面図、図8は角形の容器を集合する際の角形容器の回転を示す平面図、第9図は従来の固定ガイドを利用した場合の円柱状容器の集合状態を示す平面図である。
【0015】
図1の平面図において、本発明にかかる容器集合装置1は上流から複数列の容器を直立状態で搬送する供給コンベヤ2、これに隣接して下流側が順次高速化する複数列のコンベヤから構成される集合コンベヤ3、単列に集合された容器を下流側に搬送する排出コンベヤ4、前記の各コンベヤ上を斜めに横切って容器を誘導するサイドベルト及びその駆動装置を備えた複数のサイドベルト装置5、並びに前記複数のサイドベルト装置5、及び各コンベヤの速度を設定制御する速度制御手段を主体として構成されている。
【0016】
また同図において、速度制御手段としての制御機器を収容する制御盤6及び操作盤7が図示の如く配置されている。なお、各駆動装置11及び駆動伝達装置12は本容器集合装置1を構成する各コンベヤを速度制御手段の制御に基づきそれぞれ所定の速度で駆動する機能を備えている。
【0017】
図2において本発明に掛かる容器集合装置の機能を円柱状の容器Mを対象として説明すると、複列の容器Mが供給コンベヤ2からガイド9、10に案内されて矢印Fの方向に供給され、下流側ガイド端部9aに進行方向を誘導された後、複数のサイドベルト装置5のサイドベルト5a、5b、5c、5dにより誘導されて集合コンベヤ3上を進行する。この時、集合コンベヤ3に複数列で供給された容器Mは、集合コンベヤ3を構成する順次高速化する複数列のコンベヤ及び複数のサイドベルト5a、5b、5c、5dにより回転及び加速され、また進行方向及び容器相互の位置関係を誘導されて順次列数を減少させて最終的に単列化される。
【0018】
同図において、複数のサイドベルト装置5の一部をなす第1サイドベルト5a、第2サイドベルト5b、第3サイドベルト5c、第4サイドベルト5dは各々のベルト駆動装置13a,13b,13c,13d(図示省略)により矢印方向にそれぞれ所定の速度で駆動される。また、コンベヤの下流側に進行するに従って容器の進行は高速となり、容器ガイドとしてのサイドベルトはコンベヤ走行方向に角度が大きいほど容器の衝突による衝撃が大きくなり転倒の原因となるため、第1サイドベルト5a乃至第4サイドベルト5dは順次コンベヤに添う方向に配設されて容器の円滑な走行を図っている。
【0019】
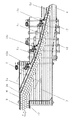
図3の正面図において、供給コンベヤ2、集合コンベヤ3及び排出コンベヤ4のコンベヤフレーム18はコンベヤ支柱15に支えられて各コンベヤの容器搬送面を同一平面に維持し、複数のサイドベルト装置5の各サイドベルト5a乃至5d及び詳細後述の固定ガイド17が容器Mに対応する高さで配設されている。
【0020】
図4において、容器Mを搬送する複数のコンベヤチエン19、並びにサイドベルト5aに接して集合途上の容器M1,M2,M3が示されている。この時、サイドベルト5aは容器の安定を損なわないよう円柱状の容器M1の底面近傍胴部で容器に接触するよう配設されている。また、上部の固定ガイド17はサイドベルト5aに比して図中左方のやや後退した位置に配設されて、通常搬送される時は容器M1と接触せず、容器転倒の原因となる可能性のある接触抵抗をなくしている。しかしながら衝突等により大きく容器M1が傾斜した時、固定ガイド17は容器M1の傾きを防いで容器M1がサイドベルト5aの左方に転倒する事態を防ぐ機能をはたす。
【0021】
図5に示す実施例において、サイドベルト5a乃至5dはタイミングベルトを使用しており、タイミングベルトとプーリ間にはすべりがなく、安定した速度を確保している。サイドベルト5a乃至5d、及び固定ガイド17は通常容器集合装置1全体を通して同じ高さに配設されて、サイドベルト5a乃至5dが容器の流れを誘導する。また、サイドベルト5a、5b間のサイドベルトのつなぎ目にはスペースガイド20が設置されて、両サイドベルト間の容器のスムースな移行を図っている。他のサイドベルトのつなぎ目にも、同様にスペースガイド20が設置されている。なお、軸21aはサイドベルト5aの下流側に配置されて図示省略のスプロケットによりサイドベルト5aを支えている。また、同様に軸21bはサイドベルト5bの上流側に配置されて図示省略のスプロケットによりサイドベルト5bを支えている。他のサイドベルトにおいても同様の構成でスプロケットがサイドベルトを支えている。
【0022】
図6の平面図において、前述の装置構成に基づく本発明に掛かる容器の集合方法により複数列の容器Mが単列に集合される過程の詳細が示されている。即ち、図示例において、4列で供給コンベヤ2から供給された容器Mは集合コンベヤ3と第1サイドベルト5aの働きにより2列程度まで集合される。また、同様に第2サイドベルト5bの近傍で容器Mは略2列から略1.5列まで集合され、第3サイドベルト5c近傍で略1列に集合さる。第4サイドベルト5dにおいて、容器Mは1列になった後さらに容器間に小距離の隙間を持って排出コンベヤ4に移送される。
【0023】
ここで、集合コンベヤ3に供給された直後の位置P1で未だ4列状態にある4本の容器A,B,C,Dに関して集合される過程を示すと、容器A,B,C,Dは、集合コンベヤ上の進行に伴って、各位置P2から位置P6に示す如く、各サイドベルトに近い側の内側の容器Aが他の容器より先に搬送され、サイドベルトから離れた外側の容器B,C,Dが容器Aに遅れて順番に搬送されている。また、前記の容器A乃至Dの相互関係のみならず、記号省略の他の容器を含めて容器全体として、各サイドベルトに近い内側の容器が先に流れ、外側の容器が内側の容器の後に搬送される形で順次集合が行われる。
【0024】
前記の如く、サイドベルトに近い側の容器の進行速度をサイドベルトから離れた側の容器の進行速度と同等以上の進行速度とし、サイドベルトから離れた位置の容器をサイドベルトに近い側の容器の後方に順次集合させて複数列の容器を単列化するために、図6に示す各コンベヤ及び各サイドベルトの進行速度を例えば以下に記載の如く設定する。ここで集合コンベヤ3、及び排出コンベヤ4を構成する各コンベヤをコンベヤの上流側から図示の如くコンベヤC1,C2以下C13とし、それぞれのコンベヤ速度を速度V1,V2以下コンベヤ速度V13とする。
【0025】
図6において、円柱状の容器Mを対象として本発明の方法及び装置により、容器の転倒を防止して高速集合する際の実施例としての速度設定を以下に示す。即ち、4列千鳥配列で容器を搬送する供給コンベヤ2の進行速度V0を基準として、コンベヤC1以下コンベヤC13までのコンベヤ速度を、それぞれV1=1.44V0,V2=1.94V0,V3=2.44V0,V4=2.78V0,V5=3.22V0,V6=3.67V0,V8=4.28V0,V9=4.67V0,V10=5V0,V11=5.22V0,V12=5.44V0,V13=5.56V0に設定する。
【0026】
上記のコンベヤ速度設定において、サイドベルトに接触する容器を容器より高速で進行するサイドベルトで回転並びに加速するために、各サイドベルト5a乃至5dの速度v1乃至v4は以下の如く設定する。例えば、サイドベルト5aの速度v1は、サイドベルト5aのコンベヤ進行方向速度(v1・cosα)がサイドベルト5aの終端部において、集合途上のサイドベルト5aから離れた外側の容器Mを搬送するコンベヤC5の速度V5である3.22V0よりやや高速となるように、例えば3.6V0とする。ここでαはサイドベルト5aのコンベア進行方向に対する傾斜角度である。
【0027】
また、サイドベルト5bの速度v2は、コンベア進行方向速度(v2・cosβ)がサイドベルト5bの終端部に対応するコンベヤC8の速度V8である4.28V0よりやや高速になるように、例えば4.52V0とする。ここでβはサイドベルト5bのコンベヤ進行方向に対する傾斜角度である。
【0028】
なお、サイドベルト5cの終端部において、容器は略集合完了しているので、サイドベルト5cの速度v3は、コンベヤ進行方向速度(v3・cosγ)がコンベヤC9の速度V9である4.67V0とほぼ同速となるように、例えば4.8V0とする。ここでγはサイドベルト5cのコンベヤ進行方向に対する傾斜角度である。同様に、サイドベルト5dの速度v4は、コンベヤ進行方向速度(v4・cosδ)がコンベヤC11の速度V11である5.22V0とほぼ同速となるように、例えば5.33V0とする。ここでδはサイドベルト5dのコンベヤ進行方向に対する傾斜角度である。
【0029】
前記の如く、複数サイドベルト5のそれぞれの進行速度は、各サイドベルトに対応した領域の容器を搬送するコンベヤ中で外側に位置する最高速コンベヤの容進行速度より高速とする。この時、複数の前記サイドベルト5の進行速度は、取扱い容器の種類や運転能力によって、また各サイドベルトの設置角度により異なるが、対応した領域の容器を搬送する最高速コンベヤの進行速度の略1〜1.6倍とする。
【0030】
即ち、各サイドベルトの進行速度を速度vN、該当する領域の容器を搬送する最高速コンベヤの進行速度をVNとすると、前記速度比(vN/VN)は下記のデータの如く、略1〜1.6となる。

前記速度設定により、各サイドベルトに接触した容器は各部位の条件に従って容器自身の回転を含めて元来のコンベヤのみによる搬送速度から加速される。なお、通常上流側の位置P1、P2周辺においては、例えば容器Aの外側には容器B,C,D他の容器が存在して外側から容器Aを押す力が働くため、容器Aはサイドベルト5aとの速度差による自由な回転を阻止されて回転は少量に留まり、コンベヤC1、C2等外側の高速コンベヤ上の容器とサイドベルト5aに保持された形で高速搬送され、下流側の位置P4、P5ではサイドベルト側の容器は回転による容器中心の移動速度を加味して外側の容器より高速走行する傾向が強い。このように、各サイドベルト位置に置いて、サイドベルトに接した側の容器(内側の容器)が離れた側の容器(外側の容器)よりやや早く進行する状況を作り出すことが出来る。
【0032】
この結果、外側の容器は内側の容器の後方に前後の容器と接触しながら徐々に集合される状況となり、外側の容器が単独で走行して不安定になる事態は発生せず、また外側の容器の追越しが発生しないため、先行する容器やガイドに後続の容器が高速で衝突することがなくなり、プラスチック容器等の不安定な容器も高速運転において転倒をすることなく安定して集合することが出来る。
【0033】
また、前述の如く容器の集合状態が改善され、集合された容器の単列走行状態においてばらつきが少なくなり集合コンベヤの長さに余裕を見る必要がなくなる。また、サイドベルトに衝突する時の容器への衝撃が小さくなったため各サイドベルトの設置角度をコンベヤの進行方向に対して大きく出来るようになった。このため、集合コンベヤの長さは従来の固定ガイドを利用した場合に較べて大幅に短くすることが出来るようになり、集合装置全体の長さが短くなる。
【0034】
一方、図9は複数のサイドベルト装置5を利用しないで、従来の固定ガイド23を利用して円柱状の容器Mを誘導した場合を示し、集合コンベヤ3上の位置p1に記載の容器A乃至Dが集合コンベヤ3上で順次集合される過程を示している。この場合、容器A乃至Dは前述の複数のサイドベルト装置5を利用した場合と異なり、外側の容器Dがさらに早い外側のコンベヤに搬送されて内側の容器より早い速度で進行するため、位置p2、p3までの区間に置いてはD,C,B,Aの順番で前方に搬送され集合されている。その後、容器Dが集合されて単列の容器列に組込まれたため、位置p4に置いて固定ガイド23から離れた位置にあった容器Cが容器Dを追い越して、位置p5においては容器C,D,B,Aの順序で集合されている。
【0035】
このように、外側の容器が内側の容器を追い越して集合が行われる場合、例えば位置p1の容器Dは位置p4に示す如く単列に集合されるまでコンベヤC1、C2と順に単列に集合するまで内側(固定ガイド23側)の容器より速く進行し、単独の容器として不安定な状態で走行し前方の容器との衝突を繰返す。前記容器相互の衝突においては、容器が進行方向の衝突に加えて進行直角方向からの内側の容器による衝突を加えた衝撃力を受けて転倒することが多い。また、固定ガイド23に接した容器A以外の容器B,Cに関しても、多くは同じように前方の容器を追越しながら集合されるため、容器Dと同様に不安定な単独走行と衝突が発生するため多くの転倒の危険に遭遇する。
【0036】
また、外側の容器の進行が位置p1からp3の領域で先行する容器を追い越すことに起因して、容器の整列ピッチが均一にならないため、整列した容器と容器の間に所々大きな隙間が発生したり、位置p4に示す容器C如く集合コンベヤの終端部においても単列の中に入りきれず外側を走行し、容器Cが単列部の容器より高速コンベヤ上にあるため順次容器を追越しながら列の前方に搬送され、単列化が遅延または単列化ができない事態が発生する。これを補うため、図9のような固定ガイドによる集合装置に置いては、コンベヤチエンの列数を増やし速度差を小さくし、かつガイドの設置角度をなだらかにする必要がある。すなわちコンベヤを長くする必要が発生する。
【0037】
前記の如く、従来の固定ガイド23を利用した容器集合装置に置いては、特に不安定な容器を対象として高能力が要求される際に、容器の転倒が発生することが多く、生産ラインの円滑な運転を阻害する事態が発生していた。また、前述の不具合を解消するために集合コンベヤ及び固定ガイド23を長くしたり、コンベヤ搬送面から容器底面を負圧で吸引する対策が採用されているが、ガス飲料用容器や最近ますます薄肉化されて不安定化するプラスチック容器等に対して容器の転倒を防止する効果は限定的であった。
【0038】
上記の如く、容器集合装置が長大となりコストが高いのみならず、限定されたプラント設置スペースの中でのレイアウトを制約する問題があり、各種の不安定な容器を転倒させずに高速で集合出来る容器集合装置が求められていた。
【0039】
図7は容器集合装置1に対して、断面が正方形の角形の容器を適用した実施例を示すもので、供給コンベヤ2から5列の角形の容器Mが供給され、集合コンベヤ3上で集合される状態を示している。この時、供給コンベヤ2の速度V0並びに集合コンベヤ3、排出コンベヤ4を構成する各コンベヤの速度は、前述の円柱状の容器に対する場合と同様にサイドベルトから離れた外側の容器が内側の容器の後方に順次集合する速度に設定する。この設定により角形の容器に対しても外側の容器は内側の容器の後方に順次集合して角形の容器の集合も円滑に行われる。
【0040】
図8(a)は複列で供給された角形の容器M4が第1サイドベルト5に接触して回転力を受ける状況を示し、図8(b)は第1サイドベルト5aに接触している容器M4が回転し、さらにその外側の容器M5、M6を回転させている状況を示す。この場合、第1サイドベルト5aの速度v1は供給コンベヤ2の角形の容器Mの進行方向速度V0Sより高速に設定されており、角形の容器Mは容器自体の進行速度と第1サイドベルト5aとの速度差によって回転される。
【0041】
なお、図8(a)において、角形の容器M4と第1サイドベルト5aの速度差が小さい場合や第1サイドベルト5aに替えて固定のガイドを利用した場合には、角形の容器M4を回転させる力が少ないため角形の容器M4乃至M6は、図8(a)の状態のまま内側の容器M4と外側の容器M5、M6が密着した状態で搬送されて集合が円滑に行われない傾向があり、図示の如く容器を回転させることによってコンベヤ上で容器相互を分離して、複数列の容器を効率良く単列化していく。
【0042】
また、上記において第1サイドベルト5aの位置における角形の容器M4乃至M6の挙動を説明したが、第2サイドベルト5b以下のサイドベルトの位置においても同様の効果が発揮させることが出来るため全体として円滑な角形の容器Mの集合が可能となる。また、角形の容器に較べてサイドベルトの速度を遅くして同じ目的を達する事も出来るが、本発明においては全体としてのサイドベルトの速度設定から、サイドベルトの速度を早くして容器を回転させている。
【0043】
なお、図1において本発明の容器集合装置1は上流側及び下流側に配置されている装置並びにコンベヤの稼動状況に対応して円滑に運転速度を変更する必要がある。この為、容器集合装置1の上流及び下流の接続コンベヤ上に設置した図示省略の容器アキューム量のセンサー等の信号に基づく容器集合装置1の速度制御信号に対応して、前記複数のサイドベルト及び各コンベヤの速度をあらかじめ設定した条件に従って自動的に制御する。
【0044】
例えば、図示省略の下流側の装置が停止して図示省略の下流側の接続コンベヤ上に容器が特定位置まで蓄積された場合、複数のサイドベルト5及び各コンベヤ2,3,4の進行速度を全体として比例的に低下させる等、あらかじめ設定した条件に従って円滑な容器の集合を確保しながら図示省略の上下流の機器の稼動状況と連動した容器集合装置1の速度制御を行う。
【0045】
なお、取扱い容器の種類や運転能力等に対応して、駆動された各サイドベルトの適性配置角度が異なることがあり、生産する容器の品種変更に伴って各サイドベルト装置のコンベヤ進行方向に対する設置角度を調整容易な構造とすることが出来る。また、必要に応じて隣接する複数のサイドベルトの高さを替えて隣接する駆動軸と従動軸を同軸としながら両サイドベルト用プーリの回転数を自在として隣接するサイドベルト間の容器移行の安定を図ることも出来る。
【0046】
なお、前記の説明において各コンベヤの列数、長さ、速度、並びに各サイドベルトの種類、配設位置、個数、速度、容器の供給列数等を特定の条件で記載したが、特に記載の条件に限定されるものではなく、本発明の主旨に従って各種の応用が出来る。また、図4に記載の固定ガイド17を集合装置の使用条件に従って、駆動されたサイドベルトに変更することも出来る。
【0047】
【発明の効果】
請求項1に記載の発明によれば、設定された前記各コンベアと対応する前記複数のサイドベルトとの速度比により、サイドベルトに接触する容器を容器より高速で進行するサイドベルトで回転並びに加速することにより、サイドベルトに近い側の容器の進行速度をサイドベルトから離れた側の容器の進行速度と同等以上の進行速度として、サイドベルトから離れた位置の容器をサイドベルトに近い側の容器の後方に前後の容器と接触させながら順次集合させて複数列の容器を単列化させることが出来る。
【0048】
この結果、外側の容器は内側の容器の後方に前後の容器と接触しながら徐々に集合される状況となり、外側の容器が単独で走行して不安定になる事態は発生せず、また外側の容器の追越しが発生しないため先行する容器やガイドに後続の容器が高速で衝突することがなくなりプラスチック容器等の不安定な容器も高速運転において転倒をすることなく安定して集合出来る。このことは生産ラインの稼働率を高める効果とともに、転倒した容器の除去に要した労力を減らす省力の効果がある。
【0049】
また、容器の集合状態が改善されて集合された容器の単列走行状態のばらつきが少なくなり、集合コンベヤの長さに余裕を見る必要がなくなり、さらにサイドベルトに衝突する時の容器への衝撃が小さくなったため各サイドベルトの設置角度をコンベヤの進行方向に対して大きく出来るようになる。このため、集合コンベヤの長さは従来の固定ガイドを利用した場合に較べて大幅に短くすることが可能となり、かつコンベヤ搬送面から容器底面を負圧により吸引する必要もなく、生産ラインにおける集合装置の省スペースと集合装置の価格低減の効果がある。
【0050】
請求項2に記載の発明によれば、角形の容器を対象とする際サイドベルトに接触した角形の容器を自転させることにより、サイドベルト近傍の特に面と面が密着して一体に搬送される角形の容器をコンベヤ上で相互に分離して、複数列の容器を効率良く単列化させることが出来る。
【0051】
請求項3に記載の発明によれば、設定された前記各コンベアと対応する前記複数のサイドベルトとの速度比により、複数のサイドベルト装置を配設した部位において、サイドベルトに接触する容器を容器より高速で進行するサイドベルトで回転並びに加速することにより、サイドベルトから離れた位置の容器をサイドベルトに近い側の容器の後方に前後の容器と接触させながら順次集合させて、複数列の容器を転倒させることなく短い距離で単列化可能な容器集合装置を提供することが出来る。このため、生産ラインの稼働率を高める効果とともに転倒した容器の除去に要した労力を減らす省力の効果があり、また集合装置が短くなり、かつ容器を吸引する真空装置も必要なくなるため、生産ラインにおける集合装置の省スペースと集合装置の価格低減の効果がある。
【0052】
請求項4に記載の発明によれば、集合コンベヤを斜めに横切って配設された複数のサイドベルトのコンベヤ進行方向に対する設置角度を、下流側で順次コンベヤの進行方向に添わせた角度とすることによって、下流側で高速不安定になりがちな容器の流れを順次コンベヤの進行方向に添わせてサイドベルトとの衝突における衝撃を減らして滑らかに容器を集合することが出来る効果がある。
【0053】
請求項5に記載の発明によれば、前記複数のサイドベルトの進行速度を、各サイドベルトに対応した領域の容器を搬送する最高速コンベヤの進行速度の略1乃至1.6倍とすることによって、サイドベルトから離れた位置の容器をサイドベルトに近い側の容器の後方に順次集合させて、複数列の容器を転倒させることなく短い距離で単列化出来る効果がある。
【0054】
請求項6に記載の発明によれば、容器集合装置の上流側及び下流側の装置並びにコンベヤの稼動状況を示す容器集合装置への制御信号に基づいて、複数のサイドベルト及び各コンベヤの速度をあらかじめ設定した条件に従って自動的に制御することによって、容器集合装置を上下流の装置の稼動状況に合わせて良好な条件で自動運転を行い生産ラインの稼働率を高める効果がある。
【図面の簡単な説明】
【図1】本発明に掛かる容器集合装置の実施例を示す平面図
【図2】円柱状の容器を集合する実施例としての平面図
【図3】図2の一部容器を省略した正面図
【図4】図2のX−X断面図
【図5】図3のY部、部分詳細図
【図6】円柱状の容器が集合される過程の詳細を示す平面図
【図7】角形の容器を集合する状態を示す平面図
【図8】角形の容器を集合する際の角びんの回転を示す平面図
【図9】従来の固定ガイドを利用した場合の円柱状容器の集合状態を示す平面図
【符号の説明】
1 容器集合装置
2 供給コンベヤ
3 集合コンベヤ
4 排出コンベヤ
5 サイドベルト装置
5a,5b,5c,5d サイドベルト
6 制御盤
7 操作盤
9 ガイド
9a 下流側ガイド端
10 ガイド
11 駆動装置
12 駆動伝達装置
13 ベルト駆動装置
13a 第1サイドベルト駆動装置
13b 第2サイドベルト駆動装置
13c 第3サイドベルト駆動装置
13d 第4サイドベルト駆動装置
16 ガイド支柱
17 固定ガイド
18 コンベヤフレーム
19 コンベヤチエン
20 スペースガイド
21a,21b 軸
23 固定ガイド
A 容器
B 容器
C 容器
C1,C2,C3,C4,C5,C6,C7,C8,C8,C9,C10,C11,C12,C13 コンベヤ
D 容器
M 容器
M1,M2,M3,M4,M5,M6 容器
P1,P2,P3,P4,P5,P6 位置
p1,p2,p3,p4,p5 位置
V0,V0S 速度
V1,V2,V3,V4,V5,V6,V7,V8,V9,V10,V11,V12,V13 速度
v1,v2,v3,v4,v5 速度
α,β,γ,δ 角度
Claims (6)
- 供給コンベヤから直立状態で接触した状態で供給される複数列の容器を、供給コンベヤに隣接して配設された順次高速化する複数列のコンベヤからなる集合コンベヤに誘導し、容器を順次加速集合し単列化して排出コンベヤにより下流に搬送する容器集合方法において、
前記供給コンベヤ及び集合コンベヤ上を斜めに横切って容器を容器の集合開始位置から単列化される過程で誘導する駆動されたサイドベルトを複数配設し、
前記複数のサイドベルト及び対応する各コンベヤの速度をサイドベルトの速度と該当領域の最高速コンベヤの速度比を上流側から下流側に順次減少させてそれぞれ所定の速度に設定し、サイドベルトに接触する容器を容器より高速で進行するサイドベルトで回転並びに加速することにより、サイドベルトに近い側の容器の進行速度をサイドベルトから離れた側の容器の進行速度と同等以上の進行速度とし、
設定された前記各コンベアと対応する前記複数のサイドベルトとの速度比により、サイドベルトから離れた位置の容器をサイドベルトに近い側の容器の後方に前後の容器と接触させながら順次集合させて複数列の容器を単列化することを特徴とする容器集合方法。 - 請求項1において角形の容器を対象とする際、サイドベルトの進行速度をベルトに接触する容器の進行速度と異なる速度に設定制御してサイドベルトに接触した角形の容器を自転させることにより、サイドベルト近傍の特に面と面が密着して一体に搬送されがちな角形の容器をコンベヤ上で相互に分離して、複数列の容器を効率良く単列化させることを特徴とする容器集合方法。
- 直立状態で接触した状態の複数列の容器を供給する供給コンベヤと、これに隣接して下流側が順次高速化する複数列のコンベヤからなる集合コンベヤ、及び単列に集合された容器を下流側に搬送する排出コンベヤを備えた容器集合装置において、
前記供給コンベヤ及び集合コンベヤ上を斜めに横切って容器を容器の集合開始位置から単列化される過程で誘導するとともに、サイドベルトに接触する容器を回転並びに加速させるための駆動された複数の高速で進行するサイドベルト装置と、
前記複数のサイドベルト装置を配設した集合コンベヤ上のそれぞれの部所において、前記複数のサイドベルト及び対応する各コンベヤの速度をサイドベルトの速度と該当領域の最高速コンベヤの速度比を上流側から下流側に順次減少させてサイドベルトに接触する容器を容器より高速で進行するサイドベルトで回転並びに加速することにより、サイドベルトに近い側の容器の進行速度をサイドベルトから離れた側の容器の進行速度と同等以上の速度とし、
設定された前記各コンベアと対応する前記複数のサイドベルトとの速度比により、ササイドベルトから離れた位置の容器をサイドベルトに近い側の容器の後方に前後の容器と接触させながら順次集合させて複数列の容器を単列化可能ならしめるための複数のサイドベルト及び各コンベヤの速度設定手段とを備えたことを特徴とする容器集合装置。 - 請求項3において、集合コンベヤを斜めに横切って配設された前記複数サイドベルトのコンベヤ進行方向に対する設置角度を、下流側で順次コンベヤの進行方向に添わせた角度とすることを特徴とする容器集合装置。
- 請求項3又は4において、前記複数のサイドベルトの進行速度を、各サイドベルトに対応した領域の容器を搬送する最高速コンベヤの進行速度の略1乃至1.6倍とすることを特徴とする容器集合装置。
- 請求項3乃至5のうちいずれか一項において、容器集合装置の上流側及び下流側の装置並びにコンベヤの稼動状況を示す容器集合装置への制御信号に基づいて、あらかじめ設定した条件に従って前記複数のサイドベルト及び各コンベヤの速度を自動的に制御する速度制御手段を備えたことを特徴とする容器集合装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003192080A JP4477839B2 (ja) | 2003-07-04 | 2003-07-04 | 容器集合方法及び容器集合装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003192080A JP4477839B2 (ja) | 2003-07-04 | 2003-07-04 | 容器集合方法及び容器集合装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005022846A JP2005022846A (ja) | 2005-01-27 |
| JP2005022846A5 JP2005022846A5 (ja) | 2006-06-22 |
| JP4477839B2 true JP4477839B2 (ja) | 2010-06-09 |
Family
ID=34189477
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003192080A Expired - Fee Related JP4477839B2 (ja) | 2003-07-04 | 2003-07-04 | 容器集合方法及び容器集合装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4477839B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5713802B2 (ja) * | 2011-06-02 | 2015-05-07 | 三菱重工食品包装機械株式会社 | 容器集合装置 |
| JP5193387B1 (ja) * | 2012-10-11 | 2013-05-08 | 三田機械株式会社 | 整列搬送装置 |
| JP5976587B2 (ja) * | 2013-03-29 | 2016-08-23 | 三菱重工食品包装機械株式会社 | 容器集合装置 |
| JP2016037358A (ja) * | 2014-08-07 | 2016-03-22 | 三菱マテリアルテクノ株式会社 | 搬送装置 |
| CN112791962B (zh) * | 2019-11-25 | 2022-10-28 | 科捷智能科技股份有限公司 | 并排包裹的分离方法 |
-
2003
- 2003-07-04 JP JP2003192080A patent/JP4477839B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005022846A (ja) | 2005-01-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103619735B (zh) | 分单机和用于将松散物品分成单行的方法 | |
| CN107074458B (zh) | 用于移除包裹的移位和保持输送设备以及输送包裹的方法 | |
| JPH09290912A (ja) | 物品を単一縦列に整える搬送機構 | |
| JP6333394B2 (ja) | 固い小包および小さい小包の大きなバッグのためのシンギュレータコンベアシステム | |
| CN101795948B (zh) | 孤立毗连物品的方法 | |
| EP0727371A1 (en) | Conveyor for removing an article conveyed abreast of another article | |
| CN101903259A (zh) | 带有互相连接的正向和反向传送器的且用于防止蛋在卷轴杆上以独立的排离开之前溢出/上拱的蛋定向和聚积系统 | |
| JPH0229567B2 (ja) | ||
| US6257393B1 (en) | Product collator | |
| GB2126555A (en) | Apparatus for spreading out and slowing down a stream of upright articles | |
| US6851543B2 (en) | Conveying machine | |
| JP4477839B2 (ja) | 容器集合方法及び容器集合装置 | |
| WO2006010032A2 (en) | Article singulation and reorientation system | |
| JP2009233581A (ja) | 選別装置 | |
| JP5819101B2 (ja) | 物品分離供給装置及びそれを用いた搬送システム | |
| US20010013461A1 (en) | Separating system | |
| JP3795674B2 (ja) | 長物農産物の供給装置 | |
| JPH11240508A (ja) | 角型容器の方向規正装置 | |
| JP2005200215A (ja) | 果物等の物品の供給装置 | |
| JP3718692B2 (ja) | 容器集合装置 | |
| JP3197171B2 (ja) | 野菜の自動選果装置 | |
| CA1047553A (en) | Machine for stacking cups | |
| JP4144077B2 (ja) | 容器合流装置 | |
| CN110626756B (zh) | 一种向饼干夹心机供料的供料系统 | |
| JP2005096916A (ja) | 容器集合方法及び集合装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20050727 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060510 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060510 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090302 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090310 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090511 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090818 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091118 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20091125 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100223 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100312 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4477839 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130319 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160319 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |