JP4422300B2 - ウェハ処理装置 - Google Patents
ウェハ処理装置 Download PDFInfo
- Publication number
- JP4422300B2 JP4422300B2 JP2000180182A JP2000180182A JP4422300B2 JP 4422300 B2 JP4422300 B2 JP 4422300B2 JP 2000180182 A JP2000180182 A JP 2000180182A JP 2000180182 A JP2000180182 A JP 2000180182A JP 4422300 B2 JP4422300 B2 JP 4422300B2
- Authority
- JP
- Japan
- Prior art keywords
- wafer
- robot arm
- optical sensor
- state
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images









Description
【発明の属する技術分野】
本発明は、ウェハ処理装置に関し、特に、ウェハ処理装置内に設けられたウェハ搬送装置においていかなる方向にウェハ位置ずれが生じてもできるだけ少ない数のセンサで確実に検出し得る装置に関する。
【0002】
【従来の技術】
ウェハの表面を処理する装置(以下「表面処理装置」という)としてエッチング装置、CVD装置、PVD装置が知られている。これらの装置は、基本構成として、ウェハの表面処理が行われる所要の減圧状態の空間を形作る真空容器(処理チャンバ)と、真空容器内を所要の減圧状態にする排気機構と、真空容器内にプロセスガスを供給するガス供給機構と、真空容器内に電力を供給する電力供給機構と、処理すべきウェハを設置するステージと、真空容器内の当該ステージにウェハを搬入して搭載しかつ搬出して取除くウェハ搬送装置を備えている。ウェハの表面処理を行う真空容器と、ウェハ搬送装置が備えられる容器とは隣接して設けられ、その間にはゲートバルブが設けられている。ウェハ搬送装置が備えられた容器は、通常、セパレーションチャンバ(または搬送チャンバ)と呼ばれ、その周囲に複数のウェハ処理用の真空容器が設けられている。
【0003】
上記の表面処理装置では、1枚のウェハの表面処理のための動作が次のように行われる。まず最初に、外部から処理を受ける1枚のウェハがウェハ搬送装置が設けられた容器内に搬入され、その後にウェハはウェハ搬送装置によってゲートバルブを経由して真空容器内へ搬入され、ステージの上に搭載される。その後、ゲートバルブは閉じられ、真空容器は密閉される。この状態で真空容器の内部を排気機構によって所定の減圧状態に排気した後、真空容器内にガス導入機構によってプロセスガスが導入される。当該プロセスガスの導入量は、真空容器内に設定される減圧状態との関係で、適当な流量に設定され、維持される。その後、電力供給機構により電力がプロセスガスに供給され、この電力でプラズマが生成され、当該プラズマの作用でステージ上のウェハの表面処理が行われる。ウェハの表面処理が終了すると、ウェハ搬送装置によってウェハの交換が行われる。ウェハの交換は、ウェハ搬送装置によって表面処理が終了したウェハをステージから取除き、真空容器から取出し、表面処理装置の外部へ搬出し、その後、次に表面処理すべきウェハを前述と同様に真空容器内に搬入するように、行われる。上記のごとくしてウェハの交換を行った後に前述と同様な動作を繰返す。
【0004】
ウェハ表面処理が行われる真空容器内へウェハを搬入しまたは当該真空容器からウェハを搬出するウェハ搬送装置について、従来の一例を、図11〜図13を参照して説明する。
【0005】
図11は従来のウェハ搬送装置の平面図を示し、図12はその動作の一例を示す。この従来のウェハ搬送装置は、出願人による表面処理装置において従来より専ら利用されてきた装置である。このウェハ搬送装置はロボットアーム101と、ロボットアーム101の先部に設けられた爪付き把持プレート102を備えている。
【0006】
ロボットアーム101はベース(基礎部材)103を中心に全体が回転する構成を有する。103aが回転の中心となるベース中心部である。ベース103の下側にはモータ(図示せず)等の駆動装置が設置され、モータの駆動軸の位置はベース中心部103aの位置と一致している。ロボットアーム101は、中間連結部104を有し、ベース103と中間連結部104の間に設けられる平行リンク対105と、中間連結部104と把持プレート取付け部106の間に設けられる平行リンク対107とから構成される。平行リンク対105,107の各リンクの両端は、ベース103と中間連結部104と把持プレート取付け部106のそれぞれに回転可能に連結されている。このように連結部分(関節部)を回転させることによって、平行リンク対105とベース103と中間連結部104で平行四辺形リンク装置が形成され、平行リンク対107と中間連結部104と把持プレート取付け部106で他の平行四辺形リンク装置が形成される。平行リンク対105は第1アームを形成し、平行リンク対107は第2アームを形成する。把持プレート102は把持プレート取付け部106の先端に固定されている。把持プレート102は、図11や図12で破線によって示されるように、円形のウェハ108を搭載する二股部102aを有し、かつ搭載状態のウェハ108を周囲4箇所で押える4つの爪109を備えている。正常の搬送状態では、ウェハ108は把持プレート102の上であって4つの爪109の内側に配置されるように把持される。なお図11および図12では、ロボットアーム101の構成を明確に示すために、把持プレート102に搭載されたウェハ108は破線で示されている。
【0007】
図12を参照してロボットアーム101によるウェハ搬送の動作の一例を説明する。この動作は、最も縮んだ位置(左側後退位置)に存在するロボットアーム101がアーム機構部の位置関係を変えながら右側へアーム機構部全体を伸ばす状態を6段階(A〜F)で示している。この動作によって破線で示されたウェハ108は図において左側から右側へ位置が移される。この動作において、当然のことながらベース103の位置は変わらず、このベース103に対して平行リンク対105を時計回りに回転させかつ平行リンク対107を中間連結部104に対して反時計周りに回転させることにより、すなわちアーム角度を変化させることにより上記動作が生じる。上記のロボットアーム101の動作は、通常、ウェハ処理のためのウェハを真空容器内に搬入するときに行われる。また動作を逆にすることによって、ロボットアーム101を後退させることもできる。こうしてロボットアーム101の伸縮動作によって把持プレート102すなわちウェハ108の前進と後退を行うことが可能となり、これによりウェハ処理用真空容器に対するウェハの搬入(導入)・搬出(取出し)を行う。
【0008】
上記のウェハ搬送装置で、ロボットアーム101によってウェハ108を搬送するとき、ウェハ108が把持プレート102の上で正しい位置(正常位置)に配置されているときには問題がないが、場合に応じて、把持プレート102の上で位置ずれが生じて、ずれる場合も起きる。このようなときには、ウェハ108は一部が爪109の上に乗り上げ、傾きを生じた状態になる。なお把持プレート102上でウェハ108が正常位置にあるとは、ウェハ108が4つの爪109に囲まれ、ウェハ108の中心と、4つの爪109で決まる中心110(図12のAに示す)とが一致して配置された状態のことをいう。従ってロボットアーム101でウェハを搬送するときには常にウェハ108が本来の正常位置にあり、位置ずれの不具合が生じていないか否かを監視する必要がある。かかる監視を行うため、図11等で示したウェハ搬送装置にはウェハの位置ずれを検出する装置が設けられている。
【0009】
図11に示されたウェハ位置ずれ検出装置は1つの透過型光センサ111を利用して形成されている。透過型光センサ111を図13に拡大して示す。この透過型光センサ111は、箱状容器112の手前の一面に上下の位置でパイプ部113,114を設け、この箱状容器112に2本の光ファイバ115を導いて、当該光ファイバ115の先端をパイプ部113,114の先から突き出させている。2本の光ファイバ115の先端位置115aは上下の位置関係にて一致している。例えば上側の光ファイバ115の先端115aには投光部が設けられ、下側の光ファイバ115の先端115aには受光部が設けられている。光ファイバ115に導かれて投光部から出た光116(細いビーム状光線)は、受光部で受光される。従って上側の光ファイバ115の投光部と下側の光ファイバ115の受光部の間にウェハのような遮光物が入ると、光116は遮ぎられる。このウェハ位置ずれ検出装置では、ウェハの一部が投光部と受光部の間に存在するか否かで、ウェハの有無を検出し、それによってロボットアーム101の把持プレート102に搭載されたウェハの位置ずれの有無を検出するようにしていた。以上の構成を有する透過型光センサ111はベース103の所定の箇所に取りつけられている。これによればロボットアーム101が最も縮んだ状態にあるときのウェハ108が検出されるようになっている。ロボットアーム101の最縮時の状態は図12のAで示した状態である。
【0010】
以上のごとく図11等を参照して説明した上記の従来例では、1つの透過型光センサ111を用いて把持プレート102上のウェハ108の位置ずれをロボットアーム101の最縮時の状態で検出するようにしていた。
【0011】
次に従来のウェハ位置ずれ検出機構の文献について説明する。ウェハ位置ずれ検出機構の文献として、例えば特開平7−201952号公報、特開平10−223732号公報、特開平10−247681号公報、特開平10−64971号公報、特開平6−24284号公報等を挙げることができる。
【0012】
特開平7−201952号公報は半導体製造装置に関するもので、ドライエッチング装置等の処理容器内のステージにウェハを置く際のウェハの位置ずれを検出し、これを防止する装置が備えられている。ウェハ位置ずれ検出装置は、ステージのウェハ載置面の縁に沿って3つの反射型センサを設け、ステージの上に載置されるウェハの最外周の3箇所を検出する構成となっている。3つの反射型センサのいずれかが反射光を検出できないときには、位置ずれが生じたと判定される。
【0013】
特開平10−223732号公報は、ウェハの位置を効率よく正確に検出し、ウェハ移載動作を適切に補正する位置ずれ検出装置および方法を開示する。この位置ずれ検出では透過型または反射型の2つの光学センサを所定位置に配置し、当該2つの光学センサでウェハの円周の2箇所を検出して、円形ウェハの弦の長さを求め、この弦の長さとウェハの既知の半径と直角三角形の3辺の関係を利用してウェハの中心の位置を求め、これによりウェハの位置ずれの有無を検出している。2つの光学センサによるウェハの円周部の2ヶ所の検出は同時に1回のみ行われる。
【0014】
特開平10−247681号公報は基板ステージの上に基板を搭載するとき、基板の搬送前後の位置ずれを検出し、基板ステージ上の所望の位置に基板を搭載する位置ずれ検出装置を開示している。基板搬送装置で基板を基板ステージの上に搬送して配置する場合において、搬送前の段階で切欠き部を含む3箇所の基板外縁部を3つのセンサで検出し、搬送後の段階で切欠き部を含む2箇所の基板外縁部をを2つのセンサで検出し、基板搬送前後の検出結果を比較することにより、基板の搬送前後の位置ずれを算出するように構成されている。
【0015】
特開平10−64971号公報はウェハの位置の誤り検出を行う装置が開示される。ウェハ移送装置はウェハを運ぶのに適したブレードを有し、このブレードの上にウェハが搭載される。このブレードはスロットを有し、ブレードの上でウェハの位置ずれが生じていないか否かは、処理チャンバの入り口近くに1つの光検出センサを設け、光検出センサはスロットを通して光を反射器へ向け監視することによって行われる。ブレードのスロットの端とウェハの端の間隔を測定し、この間隔によってブレードに対するウェハの位置を計測し、ウェハの位置ずれを検出する。
【0016】
特開平6−224284号公報は、移送チャンバの周囲に複数の処理チャンバを備え、移送チャンバ内にR−θロボットを設け、このロボットでウェハを各処理チャンバへ搬入しまたは搬出する。ウェハを処理チャンバに搬入するとき、ウェハを選択された目的位置に正確に位置決めするために、目的位置に対するウェハ等の相対的な位置を検出するセンサアレイ(複数の光学的センサ)が移送チャンバの上面壁と下面壁の各外側に位置合せして配置されている。
【0017】
【発明が解決しようとする課題】
図11〜図13を参照して説明した従来の位置ずれ検出機構によれば、1つの透過型光センサ111を用いており、ウェハ108の外縁の一部が当該光センサにおいて遮光状態を作ることにより位置ずれを検出するため、構成上、搬送途中にウェハの位置ずれが発生してもウェハの一部が透過型光センサの光を遮る限り、ウェハが正常な位置にあると判断されるおそれがあった。つまり、1つの透過型光センサでウェハの外縁の一点のみを検出する構成であったため、把持プレート102の上でウェハ108の位置ずれが生じても、ずれが生じる方向によっては位置の変化がなく、光センサ111で検出され、正常と判断されることもある。その結果、把持プレート102の上のウェハは位置ずれを生じたまま搬送され、ウェハが破損する可能性も高くなる。1つの光センサ111を利用してウェハの位置ずれを検出する場合には、上記のような不具合が生じるのは宿命的なことであると考えられる。
【0018】
また前述した5件の文献の各々に開示されたウェハの位置ずれ検出の構成は、1つの光センサを利用するものでは前述と同様な問題が起き、また3つ以上の光センサを利用するものでは、光センサの並べ方によっては当然のことながら基本的にあらゆる方向のウェハの位置ずれを検出することが可能となる。しかし、3つ以上の複数の光センサを利用するものでは、コスト的にできる限り安価に装置を作製したいという要望に沿うものではない。そこで、以上のことから、ウェハ位置ずれの検出性能を高め、あらゆる方向のウェハ位置ずれを確実に検出し、かつ光センサの数をできるだけ少なくして製作コストを低減したいという要望が高まってきている。
【0019】
本発明の目的は、上記の問題を解決しかつ上記要望に応えるものであり、ウェハ処理装置において正常位置に対してどの方向に位置ずれが生じても確実に位置ずれを検出でき、さらに少数の光学的センサを用いて検出できるウェハ位置ずれ検出装置を備えたウェハ処理装置を提供することにある。
【0020】
【課題を解決するための手段および作用】
本発明に係るウェハ処理装置は、上記目的を達成するために次のように構成される。
【0021】
本発明に係るウェハ処理装置は、伸びと縮みの動作を行うアーム機構部と、アーム機構部の先部に取り付けられ、かつウェハを載置する爪付き把持プレートと、アーム機構部を回転させる回転機構部と、回転機構部およびアーム機構部を支持するベースと、ベースの上に位置不変の第1および第2の光センサとを備えたロボットアームを有し、並びに、ウェハ処理を行う真空容器を有し、さらに、ウェハが第1の位置にあるときにおける、第1の光センサによる検出結果と第2の光センサによる検出結果との第1の組合せ結果と、ウェハが第2の位置にあるときにおける、第1の光センサによる検出結果と第2の光センサによる検出結果との第2の組合せ結果と、に基づいてウェハの位置ずれの有無を判定するウェハ位置ずれ検出装置を備えるとともに、第1と第2の光センサは共にウェハが入り込む開口部を持つコ字型形態を有し、第1光センサは上記ロボットアームの伸縮方向に向かって上記開口部を向けて配置され、第2光センサは伸縮方向に直交する方向に向かって上記開口部を向けて配置される。
【0025】
【発明の実施の形態】
以下に、本発明の好適な実施形態を添付図面に基づいて説明する。
【0026】
図1は本発明に係るウェハ処理装置、および本発明に係るウェハ位置ずれ検出装置が設けられたウェハ処理装置の内部構成を示す平面図であり、図2は図1の要部の縦断面図である。図2ではウェハ位置ずれ検出装置の図示は省略されている。図1と図2によれば、マルチチャンバ形式によるウェハ処理装置10においてウェハ搬送のためのセパレーションチャンバ(ウェハ搬送チャンバ)11が示されている。セパレーションチャンバ11の内部にはウェハ搬送装置が設けられ、ウェハ搬送装置はロボットアーム12によって構成されている。図1と図2によればロボットアーム12の平面図と側面図が示される。このロボットアーム12に対して本発明に係るウェハ位置ずれ検出装置が付設される。ロボットアーム12自体の構成は、従来技術の箇所で説明されたロボットアーム101と基本的には同じである。このロボットアーム12に付設されるウェハ位置ずれ検出装置の構成に本発明の特徴があり、このウェハ位置ずれ検出装置は所定位置関係にて配置された2つの光センサ13,14(図1に示す)によって特徴付けられる。光センサ13,14は例えば透過型の光センサであり、投光部と受光部を備えている。
【0027】
まず図1と図2を参照して本発明に係るウェハ位置ずれ検出装置と関連するウェハ処理装置の概略構成を説明する。ロボットアーム12が設けられたセパレーションチャンバ11は例えばほぼ正五角形の平面形状を有し、その4つの側面に二点鎖線で示されるように処理チャンバ(真空容器)15A〜15Dが付設されている。各処理チャンバ15A〜15Dはウェハステージ16を備えている。処理対象のウェハ17は各処理チャンバにおいて当該ウェハステージ16の上に搭載される。ここでは各処理チャンバで行われるウェハの表面処理の内容については発明の要部との関係が薄いので説明を省略する。処理チャンバ15A〜15Dの各々とセパレーションチャンバ11の間には各チャンバを隔離し、それぞれの密閉性を維持するためのゲートバルブ18が設けられている。なお処理チャンバ15A〜15Dは真空容器として形成されており、ウェハステージ16に搭載されたウェハ17の表面を処理するためには処理チャンバの内部は所要の真空状態(減圧状態)にされ、かつプロセスガスと導入すると共に電力を投入することによりプラズマを発生させ、当該ウェハ17の表面を処理する。そのため、各処理チャンバには排気装置、ガス導入装置、電力供給装置等が付設されているが、これらは良く知られたものであるので、図1等では説明の便宜上省略されている。またセパレーションチャンバ11の残りの一側面には、セパレーションチャンバ11の内部空間につながる部屋19が形成され、2つのウェハ台20が並べて配置されている。このウェハ台20は中間的なウェハ配置台である。ウェハ台20は、図2に示されるように、昇降装置21により必要に応じて昇降するように設けられている。
【0028】
セパレーションチャンバ11につながる部屋20の外側には外部からセパレーションチャンバ11内へウェハ17を導入するための外部ロボットアーム22が設けられている。外部ロボットアーム22で導入されたウェハ17は、上昇状態にあるウェハ台20の上に搭載される。なお図1と図2において、移動で位置が変化した部材には原番号にダッシュが付されて示されている。
【0029】
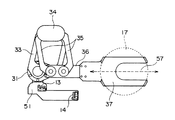
次にロボットアーム12について上記の図1と、図3および図4を参照して説明する。図3は、ロボットアーム12に基づくウェハ搬送動作状態を示す斜視図であり、図3のAはロボットアーム12が縮んだ状態を示し、図3のBはロボットアーム12が伸びた状態を示している。図4はロボットアーム12の部分の拡大平面図である。図3のAは図4とほぼ一致している。基本的構成は前述の通りロボットアーム101と同じである。すなわち、セパレーションチャンバ11の下壁11aにベース31を設け、ベース31は、下壁11aの下側に設けられた駆動装置32によってその中心軸の周りに自在に回転するように設けられている。ベース31には第1の平行リンク対33が取りつけられ、平行リンク対33の外端には中間連結部34が連結され、中間連結部34には第2の平行リンク対35も取りつけられ、第2の平行リンク対35の外端には把持プレート取付け部36が設けられている。中間連結部34において、平行リンク対33は下側位置で、平行リンク対35は上側位置で取り付けられている。把持プレート取付け部36の先端には把持プレート37が固定される。駆動装置32によってロボットアーム12の全体が時計回りまたは反時計周りに回転する。また平行リンク対33とベース31と中間連結部34で第1の平行四辺形リンク装置が形成され、平行リンク対35と中間連結部34と把持プレート取付け部36で第2の平行四辺形リンク装置が形成される。平行リンク対33は第1アームを形成し、平行リンク対35は第2アームを形成している。ベース31に内蔵されるモータと中間連結部34に内蔵されるモータを動作させることにより各連結部分(関節部)を回転させる。このように連結部分を回転させることによって、平行リンク対(第1アーム)33と平行リンク対(第2アーム)35が回転し、ロボットアーム12のアーム機構部が全体として把持プレート37の長さ方向(軸方向38)へ伸縮動作する。駆動装置32に基づくロボットアーム12の回転動作で把持プレート37の進退する向きが定められ、平行リンク対33,35の回転動作に基づき図3のAまたはBに示すごとくロボットアーム12の伸縮動作が行われ、把持プレート37の進退動作を行わせる。
【0030】
ロボットアーム12は、上記の構成と動作に基づいて、中間に位置するウェハ台20に置かれた未処理のウェハ17を、処理チャンバ15A〜15Dのいずれかに搬入し、あるいは処理チャンバ15A〜15Dのいずれかで処理されたウェハ17を搬出してウェハ台20に置くように作動する。処理チャンバに対してウェハを搬入するときにはロボットアーム12は処理チャンバに向かってアーム部分を伸ばし、処理チャンバからウェハを搬出するときにはアーム機構部を縮める。ロボットアーム12の伸縮動作によってウェハの搬入(導入)と搬出(取出し)が行われる。以上のごときロボットアーム12に基づくウェハの搬送動作においては、ウェハ17は把持プレート37で正常の位置にあることが必要である。すなわち、把持プレート37における4つの爪39の間に置かれることが必要である。把持プレート37においてウェハが正常位置あるか、または位置ずれが生じているか否かについての判定は、付設された位置ずれ検出装置によって行われる。ウェハの位置ずれとは、ウェハの一部が爪39の上に乗り上げることをいう。
【0031】
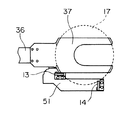
ロボットアーム12のみを拡大して示した図4では特にウェハ位置ずれ検出装置の平面図を併せて示しており、さらに図5はウェハ位置ずれ検出装置の側面図を示している。前述の図3と、さらに図4と図5とを参照して、ウェハ位置ずれ検出装置を説明する。なおウェハ位置ずれ検出装置は上記のベース31に固定されているが、図2では図が細かくなるので、ウェハ位置ずれ検出装置の図示は省略されている。搬送時に生じるウェハ17の位置ずれを検出する位置ずれ検出装置は、本実施形態の場合、2つの光センサ13,14を用いて構成されている。位置ずれ検出装置は、ベース31に固定される取付けプレート51と、取付けプレート51の上で所定の位置関係で固定される2つの光センサ13,14とからなる。取付けプレート51は水平に保持され、その面は搬送されるウェハ17の面と平行になっている。またロボットアーム12が伸縮動作を行うと、把持プレート37はその軸方向38に移動するが、取付けプレート51は、その長手方向が当該軸方向38に向けて延設された形態を有している。上記取付けプレート51に対して光センサ13は軸方向38に関して後側に設けられ、光センサ14は軸方向38に関して前側に設けられている。光センサ13,14の設置位置は、ロボットアーム12が最も縮んだ状態になった時(最縮時)においてウェハ17と光センサ13,14とが所定の位置関係になるように定められている。位置関係に関して満たすべき条件はウェハ17の位置に対応した光センサ13,14の動作状態に基づいて与えられ、その詳細は後述される。
【0032】
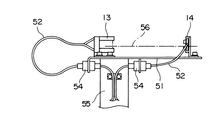
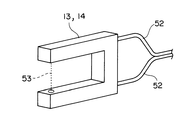
光センサ13,14は透過型の光センサであり、図3〜図6に示すコ字型フレームの中に光ファイバ52を配線し、コ字型フレームの先端部において例えば上側先端に投光部を設け、下側先端に受光部を設けるように形成される。光センサ13,14のコ字型フレームにおいて先端部の投光部と受光部の間にウェハが通過するための開口部が形成されている。コ字型フレームの先端部の間には光ビーム53が通っている。この光ビーム53を遮ると遮光状態になり、そうでない場合には受光状態になる。コ字型フレームの光センサ13,14の後側から引き出された光ファイバ52は取付けプレート51の下側へ引き出され、カプラー54を経由してさらに支柱プレート55に沿って下方へ延設される。図5において56は搬送されるウェハの高さ位置を示している。
【0033】
上記において、ウェハ17としては例えば直径200mmのものを想定しており、かかるウェハ17を検出するために取付けプレート51の寸法や取付けプレート51における光センサ13,14の配置位置が設定されている。またコ字型フレームを有してなる光センサ13,14の配置状態は、図4および図5に示されるごとく、後側光センサ13はコ字型フレームが軸方向(ロボットアームの伸縮方向)38に平行になるように配置されかつ前方(図4中右側)に向かって開いており(開口部が軸方向38に向く)、前側光センサ14はコ字型フレームが軸方向38に直交するように配置されかつ図4中上側に向かって開いている(開口部が軸方向38の直交方向に向く)。
【0034】
次に上記構成を有するロボットアーム12の動作を説明すると共に、併せて本発明に係るウェハ位置ずれの検出方法を説明する。この説明では、前述の各図と共に、図7〜図10を参照する。図7は、把持プレート37の上にウェハ17が搭載された状態で、ロボットアーム12が矢印57のごとき搬送動作を行ってウェハ17を搬送する過渡的な状態を示している。矢印57の方向は前述の軸方向38の方向と一致している。またウェハ17は把持プレート37の形状を明確に示すために破線で示されている。ロボットアーム12が最も伸びた状態(例えば図12のFの状態)では、把持プレート37とこれに搭載されるウェハ17は処理チャンバの内部に進入した状態になる。ロボットアーム12が最も縮んだ状態ではウェハ17の外縁が2つの透過型光センサ13,14と係わり合うことになる。図8と図9は、ロボットアーム12が軸方向38にて収縮し、把持プレート37およびウェハ17が後退した2つの状態を示している。図8に示す位置関係は1回目のウェハ17の検出状態に関する位置関係を示している。このとき後側光センサ13は受光状態となり、前側光センサ14は遮光状態となっている。図9に示す位置関係は2回目のウェハ17の検出状態に関する位置関係を示している。このとき後側光センサ13は遮光状態となり、前側光センサ14は受光状態となる。図9に示された位置関係はロボットアーム12の最縮状態で作られた位置関係であり、図8に示された位置関係はロボットアーム12の最縮状態から少し伸びた状態で作られた位置関係である。図9に示された後側光センサ13が遮光状態(これをオンとする)、前側光センサ14が受光状態(これをオフとする)となる状態を作る位置関係を基準位置と呼ぶことにする。
【0035】
図8と図9に示されたロボットアーム12(すなわちウェハ搬送装置)の動作によって生じるウェハ17と2つの透過型光センサ13,14との位置関係は、ロボットアーム12の動作を制御装置で制御することにより作られる。制御装置としてはコンピュータが使用され、よく知られるものであるので、ここでは図示しない。本実施形態によるウェハ17の位置ずれ検出は、2つの光センサ13,14を利用してかつ図8と図9で示された2つの状態を作り出すことによって行われる。
【0036】
ウェハの位置ずれの検出の仕方は次の通りである。処理チャンバ15A〜15Dのいずれかで表面処理が終了したウェハ17を取出すときには、ロボットアーム12は伸びた状態でその把持プレート37でウェハ17を受け取り、収縮動作を行う。このときにおいて、ウェハ17が把持プレート37の上において正常な位置にあるか、または位置ずれが生じている否かが問題である。そこで、位置ずれの有無について検出を行う。把持プレート37にウェハ17を搭載した状態で、ロボットアーム12は収縮動作を行い、ウェハ17を図7で左側方向へ移送させる。そして前述した図8に示される位置でロボットアーム12の動作を一旦停止させる。このとき、ウェハ17が把持プレート37に対して位置ずれを生じることなく正常な位置にあれば、後側の透過型光センサ13が受光状態、前側の透過型光センサ14が遮光状態になる。図8に示した位置関係でウェハ17の1回目の位置検出を行い、把持プレート37の上でウェハ17が正常位置、すなわち爪39に乗り上げることなく4つの爪の間の箇所に配置されていることが確認される。
【0037】
次にロボットアーム12を動作させ、さらに収縮動作を行わせ、ウェハ17を基準位置まで移動させる。この位置においては、図9に示すごとく、ウェハ17が正常な位置にあれば、後側の透過型光センサ13が遮光状態になり、前側の透過型光センサ14が受光状態になる。こうして図9に示された位置関係でウェハ17の2回目の位置検出が行われ、正常位置であるか否かが確認される。
【0038】
上記のごとく本実施形態によるウェハ位置ずれ検出の仕方では、2つの透過型光センサ13,14を用いてかつ図8と図9に示されるごとく2回に分けてウェハ17の位置確認を行うようにしている。これによって、把持プレート37に搭載されるウェハ17が把持プレート37に対してどの程度正常位置から外れているかを検出することが可能となる。またどの方向に位置ずれが生じたとしても、2つの光センサを利用してすべて検出することが可能となる。
【0039】
図10は、把持プレート37の上で生じる可能性のあるウェハ17の位置ずれの方向と、それぞれの方向の位置ずれに対する従来方式と本発明による(本実施形態による)方式との検出性能の比較である。位置ずれ発生方向としては、図10において上下方向、水平方向、およびそれらの間の中間に位置する方向の8方向が示されている。従来方式は、図11で示した光センサを1つ用いて構成された位置ずれ検出装置である。図10で明らかなように、従来の方式によればウェハのずれ方向として、図10中の左方向、左上方向、下方向、右下方向、左下方向の位置ずれを検出することができないが、これに対して本実施形態の方式ではすべての方向の位置ずれを検出できることが実証された。また最小限である2つの光センサ13,14を用いてすべての方向のウェハ位置ずれを検出できるという利点を有している。
【0040】
なお前述の実施形態において光センサ13,14の取付け位置を変えることにより、許容できるウェハずれ量を調整することができ、さらにウェハの寸法の変化に対応させることができる。また前述の実施形態では光センサを透過型として構成したが、反射型として構成できるのは勿論である。さらに光センサは光ファイバを利用したものに限定されない。発光素子や受光素子を利用することも可能である。また位置ずれの検出対象となるウェハとしてはシリコン基板が好ましく、透明基板は対象としていない。さらに位置ずれ検出方法に関しては、特にフローチャート等を用いてその工程を示していないが、前述の装置の構成および動作の説明で明らかであり、課題を解決するための手段の欄でその要約説明が行われている。
【0041】
【発明の効果】
以上の説明で明らかなように本発明によれば、2つの少ない光センサを用いてかつその配置関係を前述した所定位置関係を満たし、2回の検出動作における遮光状態と受光状態の組合せでウェハの把持プレートにおける搭載状態が正常位置あるかまたは位置ずれが生じているか否かを判定するようにしたので、あらゆる方向方の位置ずれをすべて確実に検出することができ、さらに光センサに要するコストも安価にして実現することができる。
【図面の簡単な説明】
【図1】本発明に係るウェハ位置ずれ検出装置が適用されるウェハ処理装置の内部構成を示す平面図である。
【図2】本発明に係るウェハ位置ずれ検出装置が適用されるウェハ処理装置の内部構成を示す縦断側面図である。
【図3】本発明によるロボットアームによるウェハ搬送動作状態を示す斜視図であり、Aはロボットアームが縮んだ状態を示し、Bはロボットアーム12が伸びた状態を示している。
【図4】本発明に係るロボットアームの平面図である。
【図5】本発明に係るウェハ位置ずれ検出装置の要部構成を示す部分側面図である。
【図6】本発明に係る透過型光センサの斜視図である。
【図7】本発明に係るロボットアームの動作の一過程を示す平面図である。
【図8】本発明に係るウェハ位置ずれ検出装置による第1回目の検出状態を示す平面図である。
【図9】本発明に係るウェハ位置ずれ検出装置による第2回目の検出状態(基準位置)を示す平面図である。
【図10】本発明に係るウェハ位置ずれ検出装置の有効性を解説するための図である。
【図11】従来のウェハ搬送装置のロボットアームの平面図である。
【図12】従来のロボットアームの動作例を示す平面図である。
【図13】従来の光センサの斜視図である。
【符号の説明】
10 ウェハ処理チャンバ
11 セパレーションチャンバ
12 ロボットアーム
13,14 光センサ
17 ウェハ
Claims (1)
- 伸びと縮みの動作を行うアーム機構部と、
前記アーム機構部の先部に取り付けられ、かつウェハを載置する爪付き把持プレートと、
前記アーム機構部を回転させる回転機構部と、
前記回転機構部および前記アーム機構部を支持するベースと、
前記ベースの上に位置不変の第1および第2の光センサと、
を備えたロボットアーム、並びに、
、ウェハ処理を行う真空容器を有し、
前記ウェハが第1の位置にあるときにおける、前記第1の光センサによる検出結果と前記第2の光センサによる検出結果との第1の組合せ結果と、
前記ウェハが第2の位置にあるときにおける、前記第1の光センサによる検出結果と前記第2の光センサによる検出結果との第2の組合せ結果と、に基づいて前記ウェハの位置ずれの有無を判定するウェハ位置ずれ検出装置を備えるとともに、
前記の第1と第2の光センサは共に開口部を持つコ字型形態を有し、
前記第1の光センサは前記ロボットアームの伸縮方向に向かって前記開口部を向けて配置され、前記第2の光センサは前記伸縮方向に直交する方向に向かって前記開口部を向けて配置されることを特徴とするウェハ処理装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000180182A JP4422300B2 (ja) | 2000-06-15 | 2000-06-15 | ウェハ処理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000180182A JP4422300B2 (ja) | 2000-06-15 | 2000-06-15 | ウェハ処理装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007192099A Division JP4422745B2 (ja) | 2007-07-24 | 2007-07-24 | ウェハ位置ずれ検出装置およびウェハ位置ずれ検出方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2001358208A JP2001358208A (ja) | 2001-12-26 |
| JP2001358208A5 JP2001358208A5 (ja) | 2007-09-06 |
| JP4422300B2 true JP4422300B2 (ja) | 2010-02-24 |
Family
ID=18681331
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000180182A Expired - Lifetime JP4422300B2 (ja) | 2000-06-15 | 2000-06-15 | ウェハ処理装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4422300B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4650273B2 (ja) * | 2006-01-12 | 2011-03-16 | シンフォニアテクノロジー株式会社 | 基板搬送装置、および基板位置検出方法 |
| JP2007227781A (ja) * | 2006-02-24 | 2007-09-06 | Tokyo Electron Ltd | 基板の位置ずれ検査機構,処理システム及び基板の位置ずれ検査方法 |
| JP2010032242A (ja) * | 2008-07-25 | 2010-02-12 | Yamatake Corp | 基板検出装置 |
| WO2023023444A1 (en) * | 2021-08-17 | 2023-02-23 | Tokyo Electron Limited | Optical sensors for measuring properties of consumable parts in a semiconductor plasma processing chamber |
-
2000
- 2000-06-15 JP JP2000180182A patent/JP4422300B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001358208A (ja) | 2001-12-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100676029B1 (ko) | 진공 처리 시스템 | |
| JP4697192B2 (ja) | 位置ずれ検出装置及びこれを用いた処理システム | |
| JP4389305B2 (ja) | 処理装置 | |
| JP4422745B2 (ja) | ウェハ位置ずれ検出装置およびウェハ位置ずれ検出方法 | |
| US20080138176A1 (en) | Apparatus for manufacturing semiconductor device | |
| US7353076B2 (en) | Vacuum processing method and vacuum processing apparatus | |
| US20150221534A1 (en) | Stacked process modules for a semiconductor handling system | |
| JP5185054B2 (ja) | 基板搬送方法、制御プログラム及び記憶媒体 | |
| JPH0936198A (ja) | 真空処理装置およびそれを用いた半導体製造ライン | |
| JP2008173744A (ja) | 搬送システムの搬送位置合わせ方法 | |
| JP2001244316A (ja) | 基板のロボットアラインメント装置及び方法 | |
| US20050118000A1 (en) | Treatment subject receiving vessel body, and treating system | |
| JP2004349503A (ja) | 被処理体の処理システム及び処理方法 | |
| WO2014077379A1 (ja) | 基板処理装置及び基板搬送方法 | |
| JP2019201083A (ja) | 基板処理装置 | |
| JP2002043394A (ja) | 位置ずれ検出装置及び処理システム | |
| JP3936030B2 (ja) | 被処理体の回収方法 | |
| JPH11288988A (ja) | アライメント高速処理機構 | |
| JP4422300B2 (ja) | ウェハ処理装置 | |
| JP2011124294A (ja) | 真空処理装置 | |
| KR200436002Y1 (ko) | 이중 아암 로봇 | |
| JP2010283334A (ja) | 基板処理装置及び半導体装置の製造方法 | |
| JP2004146714A (ja) | 被処理体の搬送機構 | |
| JPH11145241A (ja) | マルチチャンバシステムおよび基板検出方法 | |
| JP2002164416A (ja) | 被検出体の検出装置とこれを用いた処理システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070329 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070724 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090724 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A132 Effective date: 20090804 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20090907 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090918 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20090918 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091201 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091204 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121211 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4422300 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131211 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |