JP4415552B2 - モータの駆動装置及び駆動方法 - Google Patents
モータの駆動装置及び駆動方法 Download PDFInfo
- Publication number
- JP4415552B2 JP4415552B2 JP2003073916A JP2003073916A JP4415552B2 JP 4415552 B2 JP4415552 B2 JP 4415552B2 JP 2003073916 A JP2003073916 A JP 2003073916A JP 2003073916 A JP2003073916 A JP 2003073916A JP 4415552 B2 JP4415552 B2 JP 4415552B2
- Authority
- JP
- Japan
- Prior art keywords
- angle control
- conduction angle
- duty
- control method
- degree conduction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Landscapes
- Control Of Motors That Do Not Use Commutators (AREA)
Description
【発明の属する技術分野】
この発明は、インバータによってモータを、まず120度通電角制御方式で駆動し、その後に180度通電角制御方式で駆動するモータの駆動装置及び駆動方法に関する。
【0002】
【従来の技術】
インバータを用いてブラシレスモータの速度を制御技術として、いわゆる120度通電角制御方式と180度通電角制御方式とがある。いずれの方式も、例えばのこぎり波と正弦波とに基づいてPWM(パルス幅変調)制御を行う。
【0003】
120度通電角制御方式では、インバータの片アームのみをチョッピングしている。これにより、各相のモータ電流の波形は電気角120度で通電する矩形波となる。一方、180度通電角制御方式では、インバータの上下アームともチョッピングを行って、各相のモータ電流は正弦波形となる。そこで、以下ではこれらをそれぞれ矩形波駆動、正弦波駆動と呼ぶことにする。
【0004】
インバータでブラシレスモータを駆動するに際し、回転速度に応じて、正弦波駆動から矩形波駆動へあるいは矩形波駆動から正弦波駆動へ適宜切り換える技術が特許文献1に公開されている。
【0005】
【特許文献1】
特開2002−233183号公報
【0006】
【発明が解決しようとする課題】
ところで、矩形波駆動と正弦波駆動とでは、モータに流れる電流波形が異なることから、両方式を切り換える際には、それぞれのPWMデューティを調整し、切り換えの際にモータに流れる相電流が急激に変化しないことが望ましい。そこで、例えば矩形波駆動用のPWMデューティv_dutyと、正弦波駆動用のPWMデューティ「v_amp」との関係を次の(1)式とすることが望ましい。
【0007】
v_duty=v_amp×α …(1)
この(1)式を利用して、矩形波駆動方式と正弦波駆動方式とを切り換える際に、それらのPWMデューティv_duty,v_ampを相互に変換することが可能である。
【0008】
ところで、発明者は、v_duty/v_ampは一定ではなく、正弦波駆動用のPWMデューティv_ampの関数になることを発見した。
【0009】
そこで、この発明の課題は、回転速度に応じて正弦波駆動と矩形波駆動とを切り換えるに際して、補正係数を最適化して適正な出力電流を実現するブラシレスモータの駆動装置及び駆動方法を提供することにある。
【0010】
【課題を解決するための手段】
上記課題を解決すべく、請求項1に記載の発明は、インバータ(1)と、前記インバータによってモータ(2)を、120度通電角制御方式と180度通電角制御方式とを切り替えて駆動するスイッチング信号(J)を生成するパルス幅変調制御部(3)とを備え、前記パルス幅変調制御部は、前記120度通電角制御方式におけるデューティ(v_duty)を、前記180度通電角制御方式におけるデューティ(v_amp)に補正係数(α)を乗じて求める通電角制御用デューティ算出部(3b)と、前記120度通電角制御方式が採用される場合には前記120度通電角制御方式における前記デューティを採用し、前記180度通電角制御方式が採用される場合には前記180度通電角制御方式におけるデューティを採用し、それぞれ前記スイッチング信号を生成する駆動切り替え部(3c)とを有する。前記180度通電方式におけるデューティは、指令回転数とモータ回転数に基づいて回転数制御を行うことにより生成される電圧指令を基に生成され、前記補正係数は、前記180度通電角制御方式における前記デューティの増加に対して減少し、前記180度通電角制御方式における前記デューティが所定の値以下の場合において、前記補正係数は一定である。ここで言う「デューティ」とは、いわゆる変調率と言い換えても良い。
【0011】
請求項2に記載の発明は、前記モータ(2)の回転速度(N)に基づいて、前記120度通電角制御方式と前記180度通電角制御方式とを切り替えて駆動するものである。
【0013】
請求項3に記載の発明は、インバータ(1)と、前記インバータによってモータ(2)を、120度通電角制御方式と180度通電角制御方式とを切り替えて駆動するスイッチング信号(J)を生成するパルス幅変調制御部(3)とを備え、前記パルス幅変調制御部は、前記120度通電角制御方式におけるデューティ(v_duty)を、前記180度通電角制御方式におけるデューティ(v_amp)に補正係数(α)を乗じて求める180度通電角制御用デューティ算出部(3b)と、前記120度通電角制御方式が採用される場合には前記120度通電角制御方式における前記デューティを採用し、前記180度通電角制御方式が採用される場合には前記180度通電角制御方式におけるデューティを採用し、それぞれ前記スイッチング信号を生成する駆動切り替え部(3c)とを有する。前記180度通電方式におけるデューティは、指令回転数とモータ回転数に基づいて回転数制御を行うことにより生成される電圧指令を基に生成され、起動後の一定期間において前記補正係数は一定であり、その後前記補正係数は時間の経過と共に減少するものである。
【0014】
請求項4に記載の発明は、前記モータ(2)の回転速度(N)に基づいて、前記120度通電角制御方式と前記180度通電角制御方式とを切り替えて駆動するものである。
【0016】
請求項5に記載の発明は、インバータ(1)によってモータ(2)を、120度通電角制御方式と180度通電角制御方式とを切り替えて駆動するモータの駆動方法であって、前記120度通電角制御方式におけるデューティ(v_duty)を、前記180度通電角制御方式におけるデューティ(v_amp)に補正係数(α)を乗じて求める第1の工程と、前記120度通電角制御方式が採用される場合には前記120度通電角制御方式における前記デューティを採用し、前記180度通電角制御方式が採用される場合には前記180度通電角制御方式におけるデューティを採用し、前記インバータによってモータ(2)を駆動するスイッチング信号(J)をそれぞれ生成する第2の工程と、前記180度通電方式におけるデューティを、指令回転数とモータ回転数に基づいて回転数制御を行うことにより生成される電圧指令を基に生成する第3の工程とを有し、前記第1の工程において、前記補正係数は、前記180度通電角制御方式における前記デューティの増加に対して減少するものである。そして前記180度通電角制御方式における前記デューティが所定の値以下の場合において、前記補正係数は一定である。
【0017】
請求項6に記載の発明は、前記モータ(2)の回転速度(N)に基づいて、前記120度通電角制御方式と前記180度通電角制御方式とを切り替えて駆動するものである。
【0019】
請求項7に記載の発明は、インバータ(1)によってモータ(2)を、120度通電角制御方式と180度通電角制御方式とを切り替えて駆動するモータの駆動方法であって、前記120度通電角制御方式におけるデューティ(v_duty)を、前記180度通電角制御方式におけるデューティ(v_amp)に補正係数(α)を乗じて求める第1の工程と、前記120度通電角制御方式が採用される場合には前記120度通電角制御方式における前記デューティを採用し、前記180度通電角制御方式が採用される場合には前記180度通電角制御方式におけるデューティを採用し、前記インバータによってモータ(2)を駆動するスイッチング信号(J)をそれぞれ生成する第2の工程とを有する。前記180度通電方式におけるデューティは、指令回転数とモータ回転数に基づいて回転数制御を行うことにより生成される電圧指令を基に生成され、起動後の一定期間において、前記補正係数は一定であり、その後前記補正係数は時間の経過と共に減少するものである。
【0020】
請求項8に記載の発明は、前記モータ(2)の回転速度(N)に基づいて、前記120度通電角制御方式と前記180度通電角制御方式とを切り替えて駆動するものである。
【0022】
【発明の実施の形態】
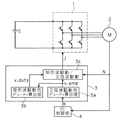
図1はこの発明の一の実施の形態に係るブラシレスモータの駆動装置を示す図である。このブラシレスモータの駆動装置は、図1の如く、直流出力Eを用いてインバータ1がブラシレスモータ(M)2に通電を行い、このブラシレスモータ2を駆動する。直流出力Eは例えば整流回路等から与えられる。
【0023】
ここで、インバータ1は、PWM制御部(制御部)3によって制御されている。即ち、PWM制御部3は、ブラシレスモータ2の回転速度Nに応じて、矩形波駆動と正弦波駆動とを切り換える。そして、PWM制御部3は、正弦波駆動用のPWMデューティv_ampを演算し、矩形波駆動用のPWMデューティv_dutyを(1)式に基づいて演算する。
【0024】
ブラシレスモータ2の回転速度Nは、例えばホール素子等を用いて実際にブラシレスモータ2の回転速度Nを検出したり、ブラシレスモータ2に供給される駆動電流を検出してこの駆動電流からブラシレスモータ2の回転速度Nを推測したりして得られる。
【0025】
具体的には、PWM制御部3は、正弦波駆動用デューティ算出部3a、矩形波駆動用デューティ算出部3b、及び矩形波駆動/正弦波駆動切換部3cを備えている。正弦波駆動用デューティ算出部3aにはPI制御部4から電圧基準Kが与えられ、これに基づいて正弦波駆動用デューティ算出部3aが正弦波駆動用のPWMデューティv_ampを生成する。この正弦波駆動用のPWMデューティv_ampは矩形波駆動用デューティ算出部3bに与えられ、(1)式に基づいて矩形波駆動用のPWMデューティv_dutyを生成する。
【0026】
図2は正弦波駆動と矩形波駆動とでブラシレスモータ2の回転速度Nが等しい場合における(v_duty/v_amp)の値をv_ampに対して示したグラフである。(v_duty/v_amp)の値はv_ampの増加に対して減少する。
【0027】
これは、ブラシレスモータ2について初期的に弱い昇磁を補正するために電流位相の進み/遅れを行ったり、整流回路における正負間でのアーム短絡を避けるために正側と負側の切り替え時間に時間差(デッドタイム)を予め設定したりすることが行われていることに起因すると考えられる。
【0028】
起動時にはブラシレスモータ2のロータの位置が検出しにくいために矩形波駆動が適しており、運転時にはトルクリップルを抑制するために正弦波駆動が適している。
【0029】
図3は、経過時間が進行するに従ってブラシレスモータ2の回転速度Nが増大する様子を示す図であり、図3中の線λ1は正弦波駆動のみを採用した場合の回転速度N、線λ2a,λ2bは矩形波駆動のみを採用した場合の回転速度Nを示している。起動時には、矩形波駆動を採用する方が回転速度Nが早期に増大することがわかる。
【0030】
モータの特性や駆動回路の特性などによって、例えば矩形波駆動の回転速度Nの上昇率は線λ2a,λ2bのように異なることがあるため、正弦波駆動と矩形波駆動との切換タイミングを起動時からの経過時間T1,T2で一律に設定するよりは、モータの回転速度Nがω0になった時点で切り換える方が、低速回転時の矩形波駆動の利点と、高速回転時の正弦波駆動の利点を有効に機能させることができる。したがって、矩形波駆動/正弦波駆動切換部3cはブラシレスモータ2の回転速度Nが所定値ω0以下である場合には矩形波駆動に基づいて、所定値ω0を越える場合には正弦波駆動に基づいて、それぞれ各方式用のPWMデューティv_duty,v_ampを用いてスイッチング信号Jを生成する。スイッチング信号Jは、インバータ1を構成するスイッチング素子(例えばトランジスタ)のオン/オフを制御する。
【0031】
補正係数αは、正弦波駆動用のPWMデューティV_ampに応じて変化する値として設定されており、具体的には例えば、次の表1に励磁されたテーブルデータ(データ)としてフラッシュROM等の記憶媒体に予め保有された複数の値の中から、駆動方式の切換時点での正弦波駆動用のPWMデューティv_ampを参照キーとして選択される。
【0032】
【表1】

基本的な考え方としては、図2に示された(v_duty/v_amp)を補正係数αとして採用すれば、両駆動方式を切り換える際にもブラシレスモータ2に流れる相電流に不要なリンギングを発生させない。
【0034】
図3に示したように矩形波駆動から正弦波駆動への切り換えは、線λ2a,λ2bに示されるような回転速度Nの上昇率が異なる場合においても共通に回転速度Nに基づいて行っており、PWMデューティに基づいて行われるのではない。よって、例えばブラシレスモータ2にファンが取り付けられている場合、これに風が当たっているか否かによって、矩形波駆動から正弦波駆動への切り換えの際のPWMデューティは異なる。
【0035】
図4及び図5のいずれもブラシレスモータ2にファンを取り付けており、ファンにあたる風によって回転させたい方向とは逆に300rpmで回転している状態から、回転させたい方向に920rpmまで回転速度を上昇させる場合を示している。時刻t1,t2,t3はそれぞれ起動開始、矩形波駆動から正弦波駆動への切り換え、及び定常回転となった時点を示す。ただしω0は200rpmとした。図4は無風時においてリンギングが生じないように設定されたαの値α0を用いた場合を示し、図5は図2に示されたv_duty/v_ampの値を用いた場合を示している。
【0036】
ある方向に回転するモータを逆方向に駆動するのであるから、無風時よりも起動時に必要なデューティは大きい。よって図2からわかるように、本来必要とするv_dutyよりも、α0・v_ampの方が大きくなる。よって図4に示されるように、補正係数αとして無風時の値α0を用いた場合には、矩形波駆動から正弦波駆動へ切り換える時刻t2においてリンギングQが発生する。
【0037】
これに対して図5では、本来必要とされるv_duty/v_ampの値を補正係数として採用するので、時刻t2におけるリンギングの発生は見られない。
【0038】
ただし、正弦波駆動用のPWMデューティv_ampが小さい領域ほど、補正係数αの値が大きくなってしまう。補正係数αを大きく設定した場合は、矩形波駆動用のPWMデューティv_dutyが非常に高まってしまい、時刻t1において過電流が流れてしまうおそれがある。
【0039】
そこで、図6に示すように正弦波駆動用のPWMデューティV_ampを低域D1と高域D2とに二分して補正係数αを設定する。例えば、低域D1と高域D2との境界でのPWMデューティv_ampの値は「6.7」に選定される。そして、図2において「v_amp=6.7」の際のv_duty/v_ampの値「2.40」を以て、低域D1の補正係数αとする。高域D2の補正係数αは、図2に示されたv_duty/v_ampの値を採用する。参考のため、図6には図2のグラフのうち、低域D1に対応する部分を破線で示している。図6で示された補正係数αは、図2で示されたv_duty/v_ampの値を、低域D1と高域D2との境界におけるv_duty/v_ampの値でクリッピングしたものと把握することができる。表1は図6のグラフを離散化して得られるデータである。補正係数αもv_duty/v_ampと同様、v_ampの増加に対して減少すると言える。
【0040】
図7は、図6中の低域D1における破線部分(即ちv_duty/v_ampをそのまま補正係数αとして適用した場合)のブラシレスモータ2の回転速度Nと相電流の推移を示す図であって、経過時間を横軸とし、ブラシレスモータ2の回転速度L1及び相電流L2の変化を示している。図7において、時刻Taでブラシレスモータ2を矩形波駆動を以て起動した結果、相電流にリンギングRが生じており、この期間で過電流が流れるおそれがある。かかる過電流の発生は、図6中の低域D1における(v_duty/v_amp)をそのまま補正係数αとして適用した結果、ブラシレスモータ2に与える出力電流が過大となったことが原因と考えられる。かかる過電流は、ブラシレスモータやその駆動回路の耐久性を損なうおそれがある。
【0041】
そこで、表1及び図6の実線に示した補正係数αは、正弦波駆動用のPWMデューティv_ampが小さい低域D1において、v_duty/v_ampに拘わらず、過電流を防止できる程度に小さな値に設定される。換言すれば、そのような小さな値をv_duty/v_ampがとるようなv_ampを以て低域D1と高域D2の境界とする。
【0042】
図8は、図6中の低域D1(即ち、180度通電角制御方式におけるデューティv_ampが所定の値以下の場合)において補正係数αを一定値(2.4)に抑制した場合のブラシレスモータの回転速度Nと相電流の推移を示す図である。ここでは、経過時間を横軸とし、ブラシレスモータの回転速度NL1及び相電流L2の変化を示している。図8において、時刻Taでブラシレスモータを矩形波駆動を以て起動した結果、相電流の振幅が経時的に徐々に増大している。よって図7に示されたようなリンギングRが発生していない。したがって、表1や図6のような補正係数αを採用することにより過電流を防止でき、ブラシレスモータやその駆動回路の耐久性を損なう事態を防止できる。
【0043】
図9のフローチャートに沿って、このブラシレスモータの駆動装置の動作を説明する。
【0044】
まず図9のステップS01で、PI制御部4によりブラシレスモータ2の回転速度Nに基づいてPI(比例−積分)制御が開始され、電圧基準Kが生成される。これにより、ブラシレスモータ2の回転速度Nは、起動直後から経時的に増大していく。
【0045】
ここで、PWM制御部3は、ブラシレスモータ2の回転速度Nが所定の基準回転速度ω0(例えば200rpm)以下の低速回転時は矩形波駆動(120度通電角制御方式)を行い、回転速度Nが上昇して所定の基準回転速度ω0を越えた時点で、正弦波駆動(180度通電角制御方式)を行う(図3参照)。
【0046】
即ち、ステップS02において、矩形波駆動/正弦波駆動切替部3cが、ブラシレスモータ2の回転速度Nを基準回転速度ω0と比較し、その比較結果に応じて正弦波駆動であるか矩形波駆動であるかを選択する。初期的には、ブラシレスモータ2の回転速度Nは低いため、矩形波駆動を選択することになる。この場合には、次のステップS03に進む。
【0047】
ステップS03では、矩形波駆動用デューティ算出部3bにおいて、正弦波駆動用のPWMデューティv_ampに応じて、表1に示したデータテーブルから補正係数αが読み出され、この読み出された補正係数αを上記の(1)式に従って正弦波駆動用のPWMデューティv_ampに乗算する。そして、その乗算結果を、矩形波駆動(120度通電角制御方式)用のPWMデューティv_dutyとして適用して(ステップS04)する。これを受けて矩形波駆動/正弦波駆動切替部3cは、インバータの出力波形を生成するためのスイッチング信号Jを出力して(ステップS05)、ブラシレスモータ2がインバータ制御により駆動される(ステップS06)。こうして、与えられた正弦波駆動用のPWMデューティv_ampに基づいて、インバータ1によってブラシレスモータ2が矩形波駆動で駆動制御される。かかるステップS01〜ステップS05が繰り返される。
【0048】
ブラシレスモータ2の回転速度Nが経時的に上昇し、その回転速度Nが所定の基準回転速度ω0を越えると、ステップS02においてその旨が判断され、その判断結果に応じて、ステップS07に移行する。
【0049】
ステップS07では、矩形波駆動/正弦波駆動切替部3cが、正弦波駆動を選択する。そして正弦波駆動用のPWMデューティv_ampをそのまま適用して、インバータの出力波形を生成して(ステップS05)、ブラシレスモータ2がインバータ制御により駆動される(ステップS06)。以後、正弦波駆動により、ブラシレスモータ2が駆動されることになる。
【0050】
ところで、上記のステップS06において適用される補正係数αは、表1及び図6の実線に示すように、正弦波駆動用のPWMデューティv_ampが小さい(6.7以下)の低域D1において、図6中の右下がりの破線の特性に拘わらず、過電流を防止できる程度に小さな値、即ち、この低域D1における最小値(即ち、低域D1と高域D2との境界における値=2.4)に設定されている。したがって、ブラシレスモータ2に与える出力電流の過大が原因となって過電流が発生するのを防止できる。
【0051】
尚、起動後は、ブラシレスモータ2の回転速度Nを増大させていくが、その際には正弦波駆動用のPWMデューティv_ampも時間の経過とともに大きくなる。よって起動後の一定時間について補正係数αを小さくなるよう抑制してもよい。
【0052】
【発明の効果】
請求項1及び請求項5に記載の発明によれば、モータの回転速度に基づいて120度通電角制御方式と180度通電角制御方式とを切り替えても、補正係数が切り替え時のデューティに依存しているので、モータに供給される電流における切り替え時のリンギングを発生を抑えることができる。更にモータに供給される電流における起動時のリンギングを発生を抑えることができる。
【0053】
請求項2及び請求項6に記載の発明によれば、モータの回転速度の上昇率が異なっても、低速回転時の120度通電角制御方式の利点と、高速回転時の180度通電角制御方式の利点とを有効に機能させることができる。
【0055】
請求項3及び請求項7に記載の発明によれば、デューティは時間の経過と共に減少するので、時間の経過と共に減少する補正係数を用いることにより、モータに供給される電流においてリンギングの発生を抑えることができる。更に、モータに供給される電流における起動時のリンギングを発生を抑えることができる。
【0056】
請求項4及び請求項8に記載の発明によれば、モータの回転速度の上昇率が異なっても、低速回転時の120度通電角制御方式の利点と、高速回転時の180度通電角制御方式の利点とを有効に機能させることができる。
【図面の簡単な説明】
【図1】この発明の一の実施の形態に係るブラシレスモータの駆動装置を示すブロック図である。
【図2】正弦波駆動時のPWMデューティによって、矩形波駆動時のPWMデューティと正弦波駆動時のPWMデューティとの比率が変化する様子を示す図である。
【図3】経過時間が進行するに従ってモータの回転速度Nが増大する様子を示す図である。
【図4】無風時においてリンギングが生じないように設定された補正係数を用いた場合のブラシレスモータの回転速度と相電流との関係を示す図である。
【図5】補正係数として図2に示されたv_duty/V_ampの値を用いた場合のブラシレスモータの回転速度と相電流との関係を示す図である。
【図6】この発明の一の実施の形態に係るブラシレスモータの駆動装置において、正弦波形PWMデューティから120度通電波形のPWMデューティを求めるための補正係数を示す図である。
【図7】ブラシレスモータの回転速度Nに伴って相電流が推移する際に過電流が発生している様子を示す図である。
【図8】この発明の一の実施の形態に係るブラシレスモータの駆動装置において補正係数を調整することで、駆動方式の切り換え直後の過電流が防止された様子を示す図である。
【図9】この発明の一の実施の形態に係るブラシレスモータの駆動装置の動作を示すフローチャートである。
【符号の説明】
1 インバータ
2 ブラシレスモータ
3 PWM制御部
3b 補正係数
V_amp 正弦波形PWMデューティ
Claims (8)
- インバータ(1)と、
前記インバータによってモータ(2)を、120度通電角制御方式と180度通電角制御方式とを切り替えて駆動するスイッチング信号(J)を生成するパルス幅変調制御部(3)と
を備え、
前記パルス幅変調制御部は、
前記120度通電角制御方式におけるデューティ(v_duty)を、前記180度通電角制御方式におけるデューティ(v_amp)に補正係数(α)を乗じて求める通電角制御用デューティ算出部(3b)と、
前記120度通電角制御方式が採用される場合には前記120度通電角制御方式における前記デューティを採用し、前記180度通電角制御方式が採用される場合には前記180度通電角制御方式におけるデューティを採用し、それぞれ前記スイッチング信号を生成する駆動切り替え部(3c)と
を有し、
前記180度通電方式におけるデューティは、指令回転数とモータ回転数に基づいて回転数制御を行うことにより生成される電圧指令を基に生成され、
前記補正係数は、前記180度通電角制御方式における前記デューティの増加に対して減少し、前記180度通電角制御方式における前記デューティが所定の値以下の場合において、前記補正係数は一定である、モータの駆動装置。 - 前記モータ(2)の回転速度(N)に基づいて、前記120度通電角制御方式と前記180度通電角制御方式とを切り替えて駆動する、請求項1記載のモータの駆動装置。
- インバータ(1)と、
前記インバータによってモータ(2)を、120度通電角制御方式と180度通電角制御方式とを切り替えて駆動するスイッチング信号(J)を生成するパルス幅変調制御部(3)と
を備え、
前記パルス幅変調制御部は、
前記120度通電角制御方式におけるデューティ(v_duty)を、前記180度通電角制御方式におけるデューティ(v_amp)に補正係数(α)を乗じて求める通電角制御用デューティ算出部(3b)と、
前記120度通電角制御方式が採用される場合には前記120度通電角制御方式における前記デューティを採用し、前記180度通電角制御方式が採用される場合には前記180度通電角制御方式におけるデューティを採用し、それぞれ前記スイッチング信号を生成する駆動切り替え部(3c)と
を有し、
前記180度通電方式におけるデューティは、指令回転数とモータ回転数に基づいて回転数制御を行うことにより生成される電圧指令を基に生成され、
起動後の一定期間において前記補正係数は一定であり、その後前記補正係数は時間の経過と共に減少する、モータの駆動装置。 - 前記モータ(2)の回転速度(N)に基づいて、前記120度通電角制御方式と前記180度通電角制御方式とを切り替えて駆動する、請求項3記載のモータの駆動装置。
- インバータ(1)によってモータ(2)を、120度通電角制御方式と180度通電角制御方式とを切り替えて駆動するモータの駆動方法であって、
前記120度通電角制御方式におけるデューティ(v_duty)を、前記180度通電角制御方式におけるデューティ(v_amp)に補正係数(α)を乗じて求める第1の工程と、
前記120度通電角制御方式が採用される場合には前記120度通電角制御方式における前記デューティを採用し、前記180度通電角制御方式が採用される場合には前記180度通電角制御方式におけるデューティを採用し、前記インバータによってモータ(2)を駆動するスイッチング信号(J)をそれぞれ生成する第2の工程と、
前記180度通電方式におけるデューティを、指令回転数とモータ回転数に基づいて回転数制御を行うことにより生成される電圧指令を基に生成する第3の工程と
を有し、
前記第1の工程において、前記補正係数は、前記180度通電角制御方式における前記デューティの増加に対して減少し、
前記180度通電角制御方式における前記デューティが所定の値以下の場合において、前記補正係数は一定である、モータの駆動方法。 - 前記モータ(2)の回転速度(N)に基づいて、前記120度通電角制御方式と前記180度通電角制御方式とを切り替えて駆動する、請求項5記載のモータの駆動方法。
- インバータ(1)によってモータ(2)を、120度通電角制御方式と180度通電角制御方式とを切り替えて駆動するモータの駆動方法であって、
前記120度通電角制御方式におけるデューティ(v_duty)を、前記180度通電角制御方式におけるデューティ(v_amp)に補正係数(α)を乗じて求める第1の工程と、
前記120度通電角制御方式が採用される場合には前記120度通電角制御方式における前記デューティを採用し、前記180度通電角制御方式が採用される場合には前記180度通電角制御方式におけるデューティを採用し、前記インバータによってモータ(2)を駆動するスイッチング信号(J)をそれぞれ生成する第2の工程と
を有し、
前記180度通電方式におけるデューティは、指令回転数とモータ回転数に基づいて回転数制御を行うことにより生成される電圧指令を基に生成され、
起動後の一定期間において、前記補正係数は一定であり、その後前記補正係数は時間の経過と共に減少する、モータの駆動方法。 - 前記モータ(2)の回転速度(N)に基づいて、前記120度通電角制御方式と前記180度通電角制御方式とを切り替えて駆動する、請求項7記載のモータの駆動方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003073916A JP4415552B2 (ja) | 2003-03-18 | 2003-03-18 | モータの駆動装置及び駆動方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003073916A JP4415552B2 (ja) | 2003-03-18 | 2003-03-18 | モータの駆動装置及び駆動方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004282954A JP2004282954A (ja) | 2004-10-07 |
| JP4415552B2 true JP4415552B2 (ja) | 2010-02-17 |
Family
ID=33289696
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003073916A Expired - Fee Related JP4415552B2 (ja) | 2003-03-18 | 2003-03-18 | モータの駆動装置及び駆動方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4415552B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7218071B1 (en) * | 2006-03-14 | 2007-05-15 | Gm Global Technology Operations, Inc. | Method and apparatus for increasing AC motor torque output at low frequency |
| JP5157179B2 (ja) * | 2007-01-26 | 2013-03-06 | ダイキン工業株式会社 | モータ駆動制御装置 |
| JP5239273B2 (ja) * | 2007-09-13 | 2013-07-17 | 株式会社リコー | モータ駆動制御装置 |
| JP2011151957A (ja) * | 2010-01-21 | 2011-08-04 | Sanken Electric Co Ltd | ブラシレスモータの駆動装置 |
| JP6533523B2 (ja) | 2014-06-30 | 2019-06-19 | マイクロスペース株式会社 | モータ駆動制御装置および信号生成方法 |
| JP6652918B2 (ja) * | 2014-06-30 | 2020-02-26 | マイクロスペース株式会社 | モータ駆動制御装置 |
| JP7162654B2 (ja) * | 2018-03-28 | 2022-10-28 | 新電元工業株式会社 | 駆動装置、電動車両および駆動装置の制御方法 |
| JP7198121B2 (ja) * | 2019-03-04 | 2022-12-28 | マブチモーター株式会社 | ブラシレスdcモータ用の駆動装置およびモータシステム |
-
2003
- 2003-03-18 JP JP2003073916A patent/JP4415552B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004282954A (ja) | 2004-10-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100435475C (zh) | 电机驱动装置 | |
| US8159162B2 (en) | Motor control apparatus, vehicle fan drive apparatus, and motor control method | |
| KR20040010147A (ko) | 전환자기저항구동의 제어 | |
| JP4513914B2 (ja) | モータ制御回路,車両用ファン駆動装置及びモータ制御方法 | |
| JPWO2005055410A1 (ja) | 直流モータ駆動装置 | |
| JP2010045941A (ja) | モータ制御回路,車両用ファン駆動装置及びモータ制御方法 | |
| JP4415552B2 (ja) | モータの駆動装置及び駆動方法 | |
| JP4578142B2 (ja) | ブラシレスdcモータの駆動装置 | |
| JP4218317B2 (ja) | 電動流体ポンプ装置 | |
| US10498270B2 (en) | Control device for stepping motor and control method for stepping motor | |
| JP5078676B2 (ja) | ステッピングモータ駆動制御装置及びステッピングモータ駆動制御方法 | |
| JP6056629B2 (ja) | モータ制御装置 | |
| WO2021200389A1 (ja) | モータ制御装置、モータシステム及びモータ制御方法 | |
| JP2003111469A (ja) | モータの制御方法および制御装置 | |
| JP2012016122A (ja) | ステッピングモータの制御方法および制御装置 | |
| JP2007267576A (ja) | ブラシレスdcモータ制御装置 | |
| JP2009171738A (ja) | モータ駆動装置 | |
| CN111106768B (zh) | 电机的启动控制方法及装置 | |
| JP4062228B2 (ja) | 直流電動機の駆動装置 | |
| JP5724353B2 (ja) | 電動ポンプ用ブラシレスモータの制御装置 | |
| JP7718343B2 (ja) | モータ制御装置 | |
| JP5014133B2 (ja) | モータ制御方法及びモータ制御システム | |
| JP2006129543A (ja) | ステッピングモータ駆動装置およびステッピングモータ駆動方法 | |
| JP7338259B2 (ja) | モータ制御装置 | |
| JP3285717B2 (ja) | ブラシレスモータ及びその駆動装置並びにエアコンディショナのコンプレッサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060223 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20081205 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081209 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090209 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20090209 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091104 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4415552 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091117 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121204 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131204 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |