JP4410920B2 - 空気圧式ロボット及び空気圧式関節駆動装置 - Google Patents
空気圧式ロボット及び空気圧式関節駆動装置 Download PDFInfo
- Publication number
- JP4410920B2 JP4410920B2 JP2000288335A JP2000288335A JP4410920B2 JP 4410920 B2 JP4410920 B2 JP 4410920B2 JP 2000288335 A JP2000288335 A JP 2000288335A JP 2000288335 A JP2000288335 A JP 2000288335A JP 4410920 B2 JP4410920 B2 JP 4410920B2
- Authority
- JP
- Japan
- Prior art keywords
- link
- joint
- covering
- pneumatic
- bodies
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Manipulator (AREA)
- Rehabilitation Tools (AREA)
- Outerwear In General, And Traditional Japanese Garments (AREA)
Description
【発明の属する技術分野】
この発明は、ロボットや人間の関節を回動させるための空気圧式関節駆動装置及びそれを用いた空気圧式ロボットに関するものである。
【0002】
【従来の技術】
従来、電動のモータを用いたロボットでは、モータの発熱により長時間の連続した駆動が行えず、またモータ重量が大きくなり、モータを支持する構造体も重量化し、費用が高くなってしまう。
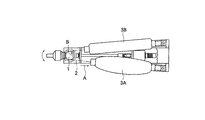
【0003】
これに対し、図8は例えば特開平7−24771号公報に示された従来の空気圧式のマニプレータ装置を示す構成図である。図において、マニプレータ装置は、関節に設けられた駆動プーリ1、この駆動プーリ1に巻き掛けられたタイミングベルト2、及びこのタイミングベルト2の両端部に接続された一対の弾性膨張体3A,3Bを有している。
【0004】
このようなマニプレータ装置では、弾性膨張体3A,3Bに対して空気を供給・排出することにより、弾性膨張体3A,3Bが伸縮され、タイミングベルト2を介して駆動プーリ1が回転されて、関節が駆動される。例えば、弾性膨張体3Aが膨張することにより、弾性膨張体3Aの長さが縮小され、タイミングベルト2は矢印A方向へ移動される。これにより、駆動プーリ1は矢印B方向へ回転される。
【0005】
図9はある重量の荷物を軸の回転により持ち上げる様子を示す説明図である。図において、支持腕4は、軸5を中心に回動される。支持腕4には、吊下腕6を介して重さW1の荷物7が吊り下げられている。実線の位置(初期位置)から支持腕4が時計方向に角度θだけ回動されると、荷物7はΔH1だけ持ち上げられる(第1持上位置)。その位置から支持腕4がさらに時計方向に角度θだけ回動されると、荷物7はΔH2だけ持ち上げられる(第2持上位置)。
【0006】
このように、同じ角度θだけ支持腕4が回動されても、初期位置から第1持上位置までの持ち上げ量はΔH1であり、第1持上位置から第2持上位置までの持ち上げ量はΔH2であり、持ち上げ量には差が生じる(ΔH1<ΔH2)。
【0007】
これに対し、図8に示した従来のマニプレータ装置は、単にモータの代わりに弾性膨張体を用いて駆動プーリ1を回転させるものであり、一定のトルクを発生するものである。従って、図9のような仕事を行う場合、初期位置から第1持上位置までの間であっても、第1持上位置から第2持上位置までの間と同じトルクを発生している。
【0008】
【発明が解決しようとする課題】
上記のような従来のマニプレータ装置は、常に一定のトルクを発生するものであるため、負担の小さな作業を行う際にも最大のトルクを発生しており、エネルギーにロスを生じ、その分だけ弾性膨張体3A,3Bや空気給排装置(図示せず)が大形化するとともに、駆動効率が低下する。
【0009】
この発明は、上記のような問題点を解決することを課題としてなされたものであり、全体を小形化できるとともに、駆動効率を向上させることができる空気圧式ロボット及び空気圧式関節駆動装置を得ることを目的とする。
【0010】
【課題を解決するための手段】
この発明に係る空気圧式関節駆動装置は、複数のリンク体と、これらのリンク体間を回動可能に連結する少なくとも1つの関節部とを有するリンク連結体に装着され、関節部で連結された一方のリンク体に対して他方のリンク体が回動するように関節部を駆動するものであって、リンク連結体を被覆する可撓性の被覆体、この被覆体に設けられ、気体を供給・排出されることにより伸縮し、被覆体に引張力を与える複数の伸縮引張体、これらの伸縮引張体に対して気体の供給・排出を行う気体給排部、及びこの気体給排部を制御する制御部を備え、複数の伸縮引張体による引張力の合力により関節部が駆動される。
また、被覆体は、人体の少なくとも下肢を覆うように構成されており、制御部には、人体の歩行を助けるように複数の伸縮引張体を伸縮させるためのデータが記憶されている。
また、被覆体は、布により構成されている。
また、伸縮引張体は、気体が供給されることにより、径が増大し、長さが縮小される弾性膨張体である。
また、この発明に係る空気圧式ロボットは、複数のリンク体と、これらのリンク体間を回動可能に連結する少なくとも1つの関節部とを有するリンク連結体、このリンク連結体を被覆する可撓性の被覆体、この被覆体に設けられ、気体を供給・排出されることにより伸縮し、被覆体に引張力を与える複数の伸縮引張体、これらの伸縮引張体に対して気体の供給・排出を行う気体給排部、及びこの気体給排部を制御する制御部を備え、複数の伸縮引張体による引張力の合力により、関節部で連結されている一方のリンク体に対して他方のリンク体が回動されるように関節部が駆動される。
【0023】
【発明の実施の形態】
以下、この発明の実施の形態を図について説明する。
実施の形態1.
図1はこの発明の実施の形態1による空気圧式ロボットを示す正面図である。図において、ベース10には、第1のリンク体11が取り付けられている。第1のリンク体11の先端部には、関節部13を介して第2のリンク体12が連結されている。第2のリンク体12は、図のZ軸と平行な軸を中心として回動可能に第1のリンク体11に連結されている。リンク連結体14は、一方のリンク体である第1のリンク体11、他方のリンク体である第2のリンク体12、及び関節部13により構成されている。
【0024】
関節部13には、第1及び第2の中継部としての第1及び第2の関節リンク15,16が回動可能に連結されている。第1及び第2の関節リンク15,16は、リンク連結体14を関節部13で折り曲げたとき、一方が内側に他方が外側に位置するように配置されている。
【0025】
第1のリンク体11の基端部と第1の関節リンク15と第2のリンク体12の先端部との間には、第1の引張装置17が接続されている。第1のリンク体11の基端部と第2の関節リンク16と第2のリンク体12の先端部との間には、第2の引張装置18が接続されている。
【0026】
第1の引張装置17は、第1のリンク体11と第1の関節リンク15との間に接続された第1の伸縮引張体としての第1の弾性膨張体19a及び第1の接続ワイヤ20aと、第2のリンク体12と第1の関節リンク15との間に接続された第1の伝達ワイヤ21aとを有している。第2の引張装置18は、第1のリンク体11と第2の関節リンク16との間に接続された第2の伸縮引張体としての第2の弾性膨張体19b及び第2の接続ワイヤ20bと、第2のリンク体12と第2の関節リンク16との間に接続された第2の伝達ワイヤ21bとを有している。
【0027】
第1及び第2の弾性膨張体19a,19bは、伸縮可能なゴム等の材料からなり、気体である空気を供給・排出することにより径が増減されるとともに全長が伸縮される。第1の引張装置17は、関節部13を中心として図の時計方向に回動させる力を第2のリンク体12に与える。第2の引張装置18は、関節部13を中心として図の反時計方向に回動させる力を第2のリンク体12に与える。
【0028】
弾性膨張体19a,19bには、気体給排部としての空気給排部23が接続されている。空気給排部23による弾性膨張体19a,19bへの空気の供給・排出は、制御部24により制御されている。制御部24は、弾性膨張体19a,19b内の圧力により空気給排部23を制御する。
【0029】
次に、動作について説明する。例えば、空気給排部23により第1の弾性膨張体19aに空気が供給され、第2の弾性膨張体19bから空気が排出されると、第1の弾性膨張体19aは、その径が大きくなるとともに、長さが短くなる。また、第2の弾性膨張体19bは、その径が小さくなるとともに、長さが長くなる。
【0030】
このような弾性膨張体19a,19bの伸縮により、第2のリンク体12は、関節部13を中心として図の時計方向へ回動される。逆に、第1の弾性膨張体19aから空気が排出され、第2の弾性膨張体19bに空気が供給されると、第2のリンク体12は、関節部13を中心として図の反時計方向へ回動される。従って、第2のリンク体12により負荷Wを上げ下げすることも可能である。即ち、第1及び第2の弾性膨張体19a,19bによる引張力の合力により関節部13が駆動される。
【0031】
また、空気給排部23の制御方法は、制御部24に予めプリセットされたデータにより制御しても、他の操縦装置(図示せず)からの指令信号を制御部24に入力することにより制御してもよい。この場合、リンク連結体14と同様の機構を持つ操縦装置を用いることにより、マスタースレーブ方式の制御を行うこともできる。
【0032】
このような空気圧式ロボットにおいては、例えば負荷Wを持ち上げる場合、関節部13回りのトルクが負荷Wの変位量に応じて変化するため、エネルギーのロスが少なく、駆動装置全体を小形化できるとともに、駆動効率を向上させることができる。また、第1及び第2の弾性膨張体19a,19b内の圧力差で負荷Wを変位させるため、装置を小形軽量化することができる。
【0033】
さらに、第1及び第2のリンク体11,12は、圧縮部材としてのみ働くため、剛性を小さくすることができ、リンク連結体14の構造を簡素化しかつ軽量化することができる。例えば、第1及び第2のリンク体11,12は、薄肉のパイプ等で構成することもできる。
【0034】
さらにまた、第1及び第2の引張装置17,18は、引張部材としてのみ働くため、圧縮・引張の両方で働く油圧シリンダ等に比べて、構造を簡単にし、軽量化することができる。即ち、第1及び第2の接続ワイヤ20a,20bや第1及び第2の伝達ワイヤ21a,21bのような軽量の材料を使用することができる。
【0035】
また、関節部13に第1及び第2の関節リンク15,16が設けられており、第1及び第2の引張装置17,18は、第1及び第2の関節リンク15,16を通して配置されているため、第2のリンク体12に作用する力の方向を安定させることができ、関節部13の回動角度の全範囲内で安定して関節部13を駆動することができる。
【0036】
なお、実施の形態1では、第2のリンク体12を図1の時計方向へ回動させるための弾性膨張体19aを1個、逆方向へ回動させるための弾性膨張体19bを1個用いたが、それぞれ複数個ずつ用いてもよい。
【0037】
実施の形態2.
また、実施の形態1では、第1及び第2の中継部として第1及び第2の関節リンク15,16を示したが、例えば図2に示すように、第1及び第2の中継部として一対の第1のローラ61及び一対の第2のローラ62を関節部13に設けてもよい。
【0038】
この場合、弾性膨張体19a,19bと第2のリンク体12の先端部との間を第1及び第2のベルト63a,63bで連結し、第1のベルト63aは一対の第1のローラ61間に通し、第2のベルト63bは一対の第2のローラ62間に通せばよい。また、この実施の形態2における第1の引張装置64は、第1の弾性膨張体19a及び第1のベルト63aにより構成され、第2の引張装置65は、第2の弾性膨張体19b及び第2のベルト63bにより構成される。
【0039】
実施の形態3.
図3はこの発明の実施の形態3による空気圧式ロボットの要部を示す平面図、図4は図3のIV−IV線に沿う断面図である。図において、第1のリンク体11の先端部には、関節部25を介して第2のリンク体12が連結されている。第2のリンク体12は、図のZ軸及びY軸に平行な2つの軸を中心として回動可能に第1のリンク体11に連結されている。リンク連結体26は、第1のリンク体11、第2のリンク体12及び関節部25により構成されている。
【0040】
Z軸回りの関節部25の駆動は、実施の形態1と同様に第1及び第2の引張装置17,18により行われる。関節部25には、第1及び第2の関節リンク15,16に加えて、第3及び第4の関節リンク27,28が回動可能に連結されている。
【0041】
第1のリンク体11の基端部と第3の関節リンク27と第2のリンク体12の先端部との間は、第3の引張装置29により接続されている。第1のリンク体11の基端部と第4の関節リンク28と第2のリンク体12の先端部との間は、第4の引張装置30により接続されている。
【0042】
第3の引張装置29は、第1のリンク体11と第3の関節リンク27との間に接続された第1の伸縮引張体としての第3の弾性膨張体19c及び第3の接続ワイヤ20cと、第2のリンク体12と第3の関節リンク27との間に接続された第3の伝達ワイヤ21cとを有している。第4の引張装置30は、第1のリンク体11と第4の関節リンク28との間に接続された第2の伸縮引張体としての第4の弾性膨張体19d及び第4の接続ワイヤ20dと、第2のリンク体12と第4の関節リンク28との間に接続された第4の伝達ワイヤ21dとを有している。他の構成は、実施の形態1と同様である。
【0043】
このような空気圧式ロボットでは、第1及び第2の弾性膨張体19a,19bを用い、Z軸を中心として第2のリンク体12を回動させることができるとともに、第3及び第4の弾性膨張体19c,19dを用い、Y軸を中心とした第2のリンク体12の回動も可能となる。
【0044】
即ち、第3及び第4の関節リンク27,28と第3及び第4の引張装置29,30とは、関節部13のY軸回りの駆動に対応する2組目の第1及び第2の中継部と第1及び第2の引張装置とに相当する。
【0045】
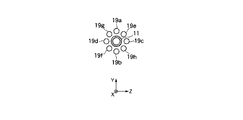
実施の形態4.
図5はこの発明の実施の形態4による空気圧式ロボットの弾性膨張体の配置状態を示す断面図である。第1のリンク体11の周囲には、第1ないし第8の弾性膨張体19a〜19hが配置されている。このように、弾性膨張体19a〜19hの数を増加し、関節部をユニバーサルジョイント等で構成することにより、第2のリンク体12をあらゆる方向へ回動させることができる。
【0046】
なお、実施の形態1〜4では、1つの関節部を含むリンク連結体について示したが、関節部の数や駆動方向に対応して引張装置を配置することにより、多関節のリンク連結体にもこの発明を適用することができる。即ち、多関節の空気圧式ロボットを構成することができる。
【0047】
また、第1のリンク体11に対して第2のリンク体12を捻り可能に連結し、引張装置をリンク連結体に螺旋状に配置することにより、第2のリンク体12を捻り方向にも回動させることができ、動作の自由度を高めることができる。
【0048】
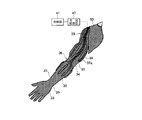
実施の形態5.
次に、図6はこの発明の実施の形態5による空気圧式ロボットを示す正面図である。図において、支持ボディ60には、人間の腕に模したリンク連結体36が支持されている。リンク連結体36は、リンク体としての上腕部31、この上腕部31の先端部に回動可能に連結されているリンク体としての前腕部32、この前腕部32の先端部に回動可能に連結されているリンク体としての手部33、上腕部31と前腕部32とを連結している肘関節部34、及び前腕部32と手部33とを連結している手首関節部35を有している。また、この例のリンク連結体36は、肘関節部34及び手首関節部35以外の関節部を持たないものとする。
【0049】
肘関節部34及び手首関節部35における回動方向及び回動角度の範囲は、人間の腕に対応してそれぞれ制限されている。支持ボディ60の少なくとも一部及びリンク連結体36の全体は、可撓性を有する布状の被覆体37によりぴったりと覆われている。被覆体37は、例えば合成繊維又は自然繊維の編み物又は織物により構成されている。また、被覆体37は、不織布や合成樹脂のシート材で構成することも可能である。
【0050】
被覆体37には、複数の袋状の収容部37aが設けられている。これらの収容部37a内には、伸縮引張体としての弾性膨張体38がそれぞれ収容されている。弾性膨張体38は、伸縮可能なゴム等の材料からなり、気体である空気を供給・排出することにより伸縮される。また、弾性膨張体38は、被覆体37が弾性膨張体38により引張されるように収容部37a内に結合されている。従って、弾性膨張体38が被覆体37に与える引張力は、弾性膨張体38の伸縮により変化する。
【0051】
各弾性膨張体38は、それぞれ可撓性を有する空気給排管39を介して気体給排部である空気給排部40に接続されている。空気給排部40による弾性膨張体38への空気の供給・排出は、制御部41により個別に制御されている。制御部41は、弾性膨張体38内の圧力により空気給排部40を制御する。実施の形態5の空気圧式関節駆動装置は、被覆体37、弾性膨張体38、空気給排管39、空気給排部40及び制御部41を有している。また、空気圧式関節駆動装置とリンク連結体36とにより空気圧式ロボットが構成されている。
【0052】
また、空気給排部40の制御方法は、制御部41に予めプリセットされたデータにより制御しても、他の操縦装置(図示せず)からの指令信号を制御部41に入力することにより制御してもよい。この場合、リンク連結体36と同様の機構を持つ操縦装置を用いることにより、マスタースレーブ方式の制御を行うこともできる。
【0053】
このような空気圧式ロボットでは、複数の弾性膨張体38による引張力の合力により、対応する関節部34,35が駆動される。即ち、各弾性膨張体38の伸縮量が調整されることにより、被覆体37にかかる引張力が部分毎に変化し、前腕部32が肘関節部34で、手部33が手首関節部35でそれぞれ回動される。従って、手部33により負荷を上げ下げすることも可能である。
【0054】
基本的な動作原理は、実施の形態1〜3と同様であり、エネルギーのロスが少なく、駆動装置全体を小形化できるとともに、駆動効率を向上させることができる。また、複数の弾性膨張体38内の圧力差で関節部34,35を駆動するため、装置を小形軽量化することができる。
【0055】
さらに、上腕部31、前腕部32及び手部33は、圧縮部材としてのみ働くため、剛性を小さくすることができ、リンク連結体36の構造を簡素化しかつ軽量化することができる。
【0056】
ここで、実施の形態1では、ワイヤ20a,20b,21a,21bを引張部材として使用しているため、これらのワイヤ20a,20b,21a,21bの接続部に力が集中的に作用する。これに対し、実施の形態5では、リンク連結体36を覆う被覆体37が引張部材として使用されているため、弾性膨張体38による引張力を広い面積で分散して受けることができ、リンク連結体36の構成を簡素化することができる。
【0057】
なお、実施の形態5では、肘関節部34と手首関節部35とを駆動する空気圧式関節駆動装置を示したが、リンク連結体36の肩関節部や指関節部を回動可能に構成し、各関節部に対応する弾性膨張体を追加して、肩関節部や指関節部を駆動するようにしてもよい。
【0058】
また、弾性膨張体の配置位置、個数、大きさ等は、関節部の動きや必要な力に応じて種々の変更が可能である。また、弾性膨張体の形状は、チューブ状のものに限定されず、必要に応じて円盤状、球状等としてもよい。
【0059】
さらに、実施の形態5では、空気圧式関節駆動装置とリンク連結体36とを組み合わせて空気圧式ロボットを構成したが、空気圧式関節駆動装置のみで使用することも可能である。例えば、腕の筋力が衰えた人などが実施の形態5の空気圧式関節駆動装置を着用することにより、腕を動かすことが可能となる。
【0060】
さらにまた、例えば弾性膨張体をリンク連結体に螺旋状に配置することにより、リンク体を捻り方向に回動させることも可能である。
【0061】
また、被覆体37の伸びの許容量及び伸びを許容する方向は、部位毎に適宜設定される。
【0062】
実施の形態6.
次に、図7はこの発明の実施の形態6による空気圧式関節駆動装置を示す正面図である。実施の形態6の空気圧式関節駆動装置は、リンク連結体である人体50に着用するタイプのものである。但し、人体50と同様のリンク構造を持つ人形状のリンク連結体に着用させて空気圧式ロボットとして動かすことも可能である。
【0063】
人体50は、上肢及び頭部を除いて、布状の被覆体51によりぴったりと覆われている。被覆体51は、実施の形態5の被覆体37と同様の材料で構成されている。被覆体51には、複数の袋状の収容部51aが設けられている。これらの収容部51a内には、伸縮引張体としての弾性膨張体38がそれぞれ収容されている。被覆体51は、弾性膨張体38により引張されている。弾性膨張体38が被覆体51に与える引張力は、弾性膨張体38の伸縮により変化する。
【0064】
弾性膨張体38は、例えば腰の回り、背中、腹部、体側部、臀部、腿、すね等に配置されている。また、各部における弾性膨張体38の大きさ、個数は、対応する関節部の動きや要求される引張力に応じて適宜設定される。また、弾性膨張体38の形状は、チューブ状のものに限定されず、必要に応じて円盤状、球状等また、被覆体37の伸びの許容量及び伸びを許容する方向は、部位毎に適宜設定される。
【0065】
各弾性膨張体38は、それぞれ可撓性を有する空気給排管(図示せず)を介して空気給排部40に接続されている。空気給排部40による弾性膨張体38への空気の供給・排出は、制御部41により個別に制御されている。制御部41は、弾性膨張体38の圧力により空気給排部40を制御する。実施の形態6の空気圧式関節駆動装置は、被覆体51、弾性膨張体38、空気給排管、空気給排部40及び制御部41を有している。
【0066】
次に、動作について説明する。空気給排部40から弾性膨張体38に対して空気を供給することにより、弾性膨張体38が被覆体51に与える引張力は増大する。逆に、弾性膨張体38から空気を排出させると、弾性膨張体38が被覆体51に与える引張力は小さくなる。これらの引張力の合力に応じて人体50の関節部、即ち腰、股関節、膝、足首等の関節部が駆動される。
【0067】
従って、実施の形態6の空気圧式関節駆動装置を着用することにより、例えば足の筋力が衰えた人が、車椅子を使わずに歩行したり、ベッドから起きあがったり、さらには立ったり座ったりすることができる。即ち、各弾性膨張体38が健常な筋肉の代替物として機能し、動作の手助けをしてくれることになる。
【0068】
このとき、引張部材である被覆体37により人体50が覆われているため、弾性膨張体38による引張力を広い面積で分散して受けることができ、人体50の一部に集中的に力が作用するのが抑えられ、人体50に負担をかけずにスムーズに動作させることができる。
【0069】
空気給排部40の制御方法は、例えば制御部41に予めプリセットされたデータにより制御しても、他の操縦装置(図示せず)からの指令信号を制御部41に入力することにより制御してもよい。例えば、歩くときの各関節の動きを実現するための弾性膨張体38の伸縮動作をデータとしてプリセットしておけば、そのデータに従って弾性膨張体38が伸縮し、人体50を歩かせることができる。例えば歩行、停止、座り、立ち上がり等の複数のデータをプリセットしておき、使用者がデータを選択することにより、種々の動作を行うことができる。
【0070】
空気給排部40や制御部41は、被覆体51の外側から腰部等にベルトで取り付けたりすればよい。また、空気給排部40及び制御部41は別置きとして、空気給排管の長さの範囲で使用者が移動するという使用方法であってもよい。その場合、リモートコントローラを用いて制御部41をワイヤレス操作することもできる。
【0071】
なお、実施の形態6では、空気圧式関節駆動装置を人体50に着用させたが、例えば人体50の構造を模した人形に着用させることにより、歩行可能な空気圧式ロボットとすることができる。また、実施の形態5のような腕に装着するタイプの空気圧式関節駆動装置を実施の形態6の駆動装置と組み合わせて人形に着用させることにより、腕や足を使ったあらゆる動作が可能な空気圧式ロボットとすることができる。
【0072】
また、実施の形態1〜6では、気体として空気を用いたが、例えば特殊な環境で使用される場合など、空気以外の気体により弾性膨張体を伸縮させてもよい。
【0073】
さらに、実施の形態1〜6では、伸縮引張体として、空気を供給することにより径が増大して長さが縮小する弾性膨張体を示したが、空気を供給することにより長さが伸び、内部の空気を吸引することにより長さが縮小するタイプの伸縮引張体を使用することも可能である。
【図面の簡単な説明】
【図1】 この発明の実施の形態1による空気圧式ロボットを示す正面図である。
【図2】 この発明の実施の形態2による空気圧式ロボットの要部を示す正面図である。
【図3】 この発明の実施の形態3による空気圧式ロボットの要部を示す平面図である。
【図4】 図3のIV−IV線に沿う断面図である。
【図5】 この発明の実施の形態4による空気圧式ロボットの弾性膨張体の配置状態を示す断面図である。
【図6】 この発明の実施の形態5による空気圧式ロボットを示す正面図である。
【図7】 この発明の実施の形態6による空気圧式関節駆動装置を示す正面図である。
【図8】 従来の空気圧式のマニプレータ装置の一例を示す構成図である。
【図9】 ある重量の荷物を軸の回転により持ち上げる様子を示す説明図である。
【符号の説明】
11 第1のリンク体、12 第2のリンク体、13 関節部、14,36 リンク連結体、15 第1の関節リンク(第1の中継部)、16 第2の関節リンク(第2の中継部)、17,64 第1の引張装置、18,65 第2の引張装置、19a 第1の弾性膨張体(第1の伸縮引張体)、19b 第2の弾性膨張体(第2の伸縮引張体)、23,40 空気給排部(気体給排部)、24,41 制御部、31 上腕部(リンク体)、32 前腕部(リンク体)、33 手部(リンク体)、34 肘関節部、35 手首関節部、37,51 被覆体、38 弾性膨張体(伸縮引張体)、50 人体(リンク連結体)、61 第1のローラ(第1の中継部)、62 第2のローラ(第2の中継部)、63a 第1のベルト、63b 第2のベルト。
Claims (5)
- 複数のリンク体と、これらのリンク体間を回動可能に連結する少なくとも1つの関節部とを有するリンク連結体に装着され、上記関節部で連結された一方のリンク体に対して他方のリンク体が回動するように上記関節部を駆動する空気圧式関節駆動装置であって、
上記リンク連結体を被覆する可撓性の被覆体、
この被覆体に設けられ、気体を供給・排出されることにより伸縮し、上記被覆体に引張力を与える複数の伸縮引張体、
これらの伸縮引張体に対して気体の供給・排出を行う気体給排部、及び
この気体給排部を制御する制御部
を備え、上記複数の伸縮引張体による引張力の合力により、上記関節部が駆動されることを特徴とする空気圧式関節駆動装置。 - 被覆体は、人体の少なくとも下肢を覆うように構成されており、
制御部には、人体の歩行を助けるように複数の伸縮引張体を伸縮させるためのデータが記憶されていることを特徴とする請求項1記載の空気圧式関節駆動装置。 - 被覆体は、布により構成されていることを特徴とする請求項1又は請求項2に記載の空気圧式関節駆動装置。
- 伸縮引張体は、気体が供給されることにより、径が増大し、長さが縮小される弾性膨張体であることを特徴とする請求項1ないし請求項3のいずれかに記載の空気圧式関節駆動装置。
- 複数のリンク体と、これらのリンク体間を回動可能に連結する少なくとも1つの関節部とを有するリンク連結体、
このリンク連結体を被覆する可撓性の被覆体、
この被覆体に設けられ、気体を供給・排出されることにより伸縮し、上記被覆体に引張力を与える複数の伸縮引張体、
これらの伸縮引張体に対して気体の供給・排出を行う気体給排部、及び
この気体給排部を制御する制御部
を備え、上記複数の伸縮引張体による引張力の合力により、上記関節部で連結されている一方のリンク体に対して他方のリンク体が回動されるように上記関節部が駆動されることを特徴とする空気圧式ロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000288335A JP4410920B2 (ja) | 2000-09-22 | 2000-09-22 | 空気圧式ロボット及び空気圧式関節駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000288335A JP4410920B2 (ja) | 2000-09-22 | 2000-09-22 | 空気圧式ロボット及び空気圧式関節駆動装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2002103270A JP2002103270A (ja) | 2002-04-09 |
| JP2002103270A5 JP2002103270A5 (ja) | 2007-10-25 |
| JP4410920B2 true JP4410920B2 (ja) | 2010-02-10 |
Family
ID=18771934
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000288335A Expired - Fee Related JP4410920B2 (ja) | 2000-09-22 | 2000-09-22 | 空気圧式ロボット及び空気圧式関節駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4410920B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103908394A (zh) * | 2014-04-02 | 2014-07-09 | 华中科技大学 | 一种便携式二自由度腕关节康复机器人 |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1753653A (zh) | 2003-03-28 | 2006-03-29 | 株式会社日立医药 | 穿着形关节驱动装置 |
| JP2006340852A (ja) * | 2005-06-08 | 2006-12-21 | Natl Rehabilitation Center For The Disabled | 着用形関節駆動装置 |
| JP2007068794A (ja) * | 2005-09-07 | 2007-03-22 | Okayama Univ | 流体アクチュエータ、流体アクチュエータの製造方法、流体アクチュエータを備えた筋力補助装置、及び流体アクチュエータで構成した拘束具 |
| JP4645392B2 (ja) * | 2005-09-27 | 2011-03-09 | カシオ計算機株式会社 | 筋力補助装置 |
| JPWO2007058085A1 (ja) | 2005-11-18 | 2009-04-30 | 日本シグマックス株式会社 | 流体圧式アクチュエータ |
| WO2007058327A1 (ja) * | 2005-11-18 | 2007-05-24 | National University Corporation Okayama University | 流体アクチュエータ及びこの流体アクチュエータを備えた動作支援装置並びに立ち上がり動作支援装置 |
| JP4407632B2 (ja) * | 2005-12-26 | 2010-02-03 | パナソニック株式会社 | 筋力補助装置 |
| JP4693755B2 (ja) * | 2006-11-28 | 2011-06-01 | 政典 杉坂 | 前脛骨筋の機能回復および補助用装置 |
| DK2332508T3 (en) * | 2009-10-05 | 2018-05-22 | Keijirou Yamamoto | LED MOVEMENT SUPPORT DEVICE |
| JP5734043B2 (ja) * | 2011-03-23 | 2015-06-10 | キヤノン株式会社 | リンク機構 |
| CN102189556B (zh) * | 2011-05-18 | 2013-09-04 | 中国计量学院 | 带缓冲弹簧和柔性轴套的气动肌肉柔顺肘关节装置 |
| JP2013146328A (ja) * | 2012-01-18 | 2013-08-01 | Seiko Epson Corp | 動作支援装置 |
| CA2885228C (en) * | 2012-09-17 | 2021-07-20 | President And Fellows Of Harvard College | Soft exosuit for assistance with human motion |
| KR101959330B1 (ko) | 2013-03-15 | 2019-03-21 | 에스알아이 인터내셔널 | 인간 신체 보강 시스템 |
| JP7561705B2 (ja) | 2021-07-14 | 2024-10-04 | 三菱重工業株式会社 | チルト装置およびアクセス装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5129592B2 (ja) * | 1972-04-04 | 1976-08-26 | ||
| JPS6021190Y2 (ja) * | 1980-04-19 | 1985-06-24 | トキコ株式会社 | 可焼性ア−ム装置 |
| JPS58163364A (ja) * | 1982-03-23 | 1983-09-28 | 工業技術院長 | 下肢障害者用動力装具 |
| JPS592344U (ja) * | 1982-06-29 | 1984-01-09 | 日本ゼオン株式会社 | 医療用チユ−ブ先端操作装置 |
| JPS59222152A (ja) * | 1983-05-28 | 1984-12-13 | 工業技術院長 | 動力装具 |
| JPS6165796A (ja) * | 1984-09-10 | 1986-04-04 | 三菱重工業株式会社 | 多関節ア−ム |
| JPS6365973A (ja) * | 1986-09-05 | 1988-03-24 | Hitachi Ltd | ロボツト装置 |
| JPH0675837B2 (ja) * | 1987-10-18 | 1994-09-28 | 征四郎 吉原 | ロボットハンド |
| JPH06190763A (ja) * | 1992-12-28 | 1994-07-12 | Masane Suzuki | 把持装置 |
| JPH07299773A (ja) * | 1994-04-28 | 1995-11-14 | Nec Corp | 身体の動作再現装置 |
| JPH08107983A (ja) * | 1994-10-12 | 1996-04-30 | Toshiba Corp | 表情変化装置 |
| JP3771056B2 (ja) * | 1998-08-14 | 2006-04-26 | 圭治郎 山本 | 介護用筋力補助装置 |
| JP2000166997A (ja) * | 1998-12-10 | 2000-06-20 | Nsk Ltd | 歩行補助装置 |
-
2000
- 2000-09-22 JP JP2000288335A patent/JP4410920B2/ja not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103908394A (zh) * | 2014-04-02 | 2014-07-09 | 华中科技大学 | 一种便携式二自由度腕关节康复机器人 |
| CN103908394B (zh) * | 2014-04-02 | 2016-06-01 | 华中科技大学 | 一种便携式二自由度腕关节康复机器人 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002103270A (ja) | 2002-04-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4410920B2 (ja) | 空気圧式ロボット及び空気圧式関節駆動装置 | |
| JP3771056B2 (ja) | 介護用筋力補助装置 | |
| US20180326243A1 (en) | A cable-driven robot for locomotor rehabilitation of lower limbs | |
| WO2004087033A1 (ja) | 着用形関節駆動装置 | |
| JP4573798B2 (ja) | 腰部支援装置 | |
| WO2004085856A1 (ja) | 流体圧式アクチュエータ及びそれを用いた持続的他動運動装置 | |
| WO2018136004A1 (en) | A fluid-driven actuator and its applications | |
| US20110251533A1 (en) | Wearable robotic system for rehabilitation training of the upper limbs | |
| JP2007097636A (ja) | 筋力補助装置 | |
| WO2007053795A2 (en) | Converting rotational motion into radial motion | |
| KR20190002260A (ko) | 신체움직임보조장치 | |
| KR20180136940A (ko) | 근력 보조 장치 | |
| Ivlev | Soft fluidic actuators of rotary type for safe physical human-machine interaction | |
| CN110861074B (zh) | 一种绳驱动柔性外骨骼助力机器人 | |
| KR100302630B1 (ko) | 인공 기능 의수 | |
| JP3870857B2 (ja) | 肢体駆動装置 | |
| KR20190002433A (ko) | 근력 보조 장치 | |
| WO2003067097A1 (fr) | Verin hydraulique et son procede de fabrication | |
| CN111568704A (zh) | 基于绳索传动的下肢康复外骨骼 | |
| JP7213497B2 (ja) | 指動作支援装置 | |
| JP6698835B2 (ja) | 動作アシスト装置 | |
| JP2020192124A (ja) | 他動運動装置 | |
| CN213099174U (zh) | 基于绳索传动的下肢康复外骨骼 | |
| CN210785246U (zh) | 一种球面外骨骼髋关节康复机构 | |
| JP2005000339A (ja) | 筋力補助装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20060602 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070911 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070911 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20080605 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090311 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090317 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090513 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091110 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091116 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4410920 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121120 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131120 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |