JP4345132B2 - 振動アクチュエータおよびその駆動方法 - Google Patents
振動アクチュエータおよびその駆動方法 Download PDFInfo
- Publication number
- JP4345132B2 JP4345132B2 JP12740899A JP12740899A JP4345132B2 JP 4345132 B2 JP4345132 B2 JP 4345132B2 JP 12740899 A JP12740899 A JP 12740899A JP 12740899 A JP12740899 A JP 12740899A JP 4345132 B2 JP4345132 B2 JP 4345132B2
- Authority
- JP
- Japan
- Prior art keywords
- frequency
- relative motion
- vibrator
- vibration
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images







Description
【発明の属する技術分野】
本発明は、振動アクチュエータおよびその駆動方法に関する。より具体的には、本発明は、駆動電圧を印加されることにより発生する振動によって相対運動部材との間で相対運動を生じる振動子と、駆動電圧を発生する駆動装置とを備える振動アクチュエータと、振動アクチュエータの駆動方法とに関する。
【0002】
【従来の技術】
この種の振動アクチュエータとして、超音波の振動域を利用した超音波アクチュエータが知られている。この超音波アクチュエータは、振動子に入力する駆動信号(交流電圧)の周波数(以下、本明細書では「駆動周波数」という。)を変化させることにより、相対運動部材との間の相対運動の速度(以下、本明細書では「相対運動速度」という。)を変化させることができる。特に、駆動周波数を振動子の共振周波数に一致させることにより、相対運動速度を最大にすることができる。
【0003】
ところで、共振周波数以外の駆動周波数を有する駆動信号を入力した場合にもある程度の相対運動速度および駆動力を得るためには、振動子に印加する駆動信号の電圧を比較的高く設定しなければならない。また、この超音波アクチュエータを、例えばX−Yステージの位置決め機構の駆動源等に適用するには、必然的に、駆動周波数を広い範囲で変化させることによって相対運動速度を低速から高速までの広い範囲で制御する必要が生じる。
【0004】
このため、振動子に印加する駆動信号の電圧が比較的高く設定されているときに駆動周波数を広い範囲で変化させた場合に、駆動周波数が振動子の共振周波数に一致すると、振動子には極めて過大なエネルギーが入力される。このため、振動子は劣化し、最悪の場合には破損してしまう。
【0005】
そこで、駆動周波数を高い値から共振周波数へ向けて掃引する際に、駆動周波数が共振周波数に一致することによって振動子に過大なエネルギーが入力されることを防止するため、これまでにも様々な提案が行われている。
【0006】
例えば特公平7−8154号公報には、振動子の圧電体からの信号を検知する振動検知用電極からの出力信号と、振動子に印加される駆動周波数との位相差を検出し、検出した位相差が共振周波数近傍となったことを示す値になった際に、これ以上低い周波数への掃引を禁止する発明が、提案されている。
【0007】
また、特公平7−10189号公報には、振動子が共振周波数から離れた駆動周波数(高周波数帯)で駆動されているときには駆動周波数の掃引を行い、共振周波数に近づいたことを、2相の駆動信号の位相差の検出値に基づいて検出したときに、これ以上低い周波数への掃引を禁止する発明が、提案されている。
【0008】
【発明が解決しようとする課題】
ところで、振動子の振動状態は、振動子の固体差や負荷変動、さらには温度変化等により、変化する。このため、これらのような環境の変化が生じた場合には、特公平7−8154号公報や同7−10189号公報により提案された発明では、位相差を特性値として用い、この特性値そのものに基づいて共振周波数への接近を判断するため、駆動周波数が共振周波数に接近したことを確実に検知することは極めて難しかった。したがって、駆動周波数が共振周波数に一致することによって振動子に過大なエネルギーが入力されることを確実に防止することができなかった。
【0009】
特に、特公平7−8154号公報により提案された発明は、駆動信号の波形が正弦波でない場合には、振動検知用電極からの出力信号と、振動子に印加される駆動周波数との位相差を検出すること自体が難しく、この点からも、駆動周波数が共振周波数に接近したことを確実に検知することは極めて難しい。
【0010】
このように、これらの従来の技術を用いても、駆動周波数を高い値から共振周波数へ向けて掃引する際に、駆動周波数が振動子の共振周波数に一致することを確実に防止することは困難であった。
【0011】
本発明は、これらの従来の技術が有する課題に鑑みてなされてものであり、例えば超音波アクチュエータ等の振動アクチュエータの駆動周波数を高い値から共振周波数へ向けて掃引する際に、駆動周波数が共振周波数に一致することによって振動子に過大なエネルギーが入力されることを確実に防止することを目的とする。
【0012】
【課題を解決するための手段】
前述した従来の技術は、いずれも、駆動周波数が共振周波数に接近したことを、例えば位相差等の特性値そのものの大きさに基づいて、検出しようとするものである。しかし、本発明者の知見によれば、振動子の固体差や負荷変動、さらには温度変化等が発生すると、この特性値の大きさと、駆動周波数の共振周波数への接近との相関関係が変化し、駆動周波数が共振周波数に近づいたことを確実に検知できない。
【0013】
本発明は、相対運動を発生している時の振動子または相対運動部材から検出される特性値の変化率を用いることによって振動子の振動状態を相対的に把握し、これにより、振動子の固体差や負荷変動、さらには温度変化等が存在しても、駆動周波数が振動子の共振周波数に一致することを確実に防止できるとの、新規な知見に基づくものである。
【0014】
請求項1の発明では、駆動電圧を印加されることにより発生する振動によって相対運動部材との間で相対運動を生じる振動子と、駆動電圧を発生する駆動装置とを備え、駆動装置が、振動子または相対運動部材から相対運動の速度を検出する検出手段と、駆動電圧の周波数を共振周波数へ向けて低下させる際に、相対運動の速度の変化率が予め定めた所定の値より小さくなった時の周波数よりも低い周波数への駆動電圧の周波数の設定を禁止する周波数制御手段とを有することを特徴とする振動アクチュエータを提供する。
【0015】
請求項2の発明は、請求項1に記載された振動アクチュエータにおいて、相対運動の速度が、共振周波数よりも高い周波数に極大値を有するとともに、予め定めた所定の値より小さくなった時の周波数が、極大値またはその近傍における周波数であることを特徴とする。
【0016】
請求項3の発明は、請求項1または請求項2に記載された振動アクチュエータにおいて、周波数制御手段が、駆動電圧の周波数を振動子の共振周波数へ向けて低下させることを特徴とする。
【0017】
請求項4の発明は、請求項1から請求項3までのいずれか1項に記載された振動アクチュエータにおいて、駆動装置が、振動子に印加する駆動電圧の周波数を変更することができる発振手段と、この発振手段からの出力信号を増幅する電力増幅手段とを有することを特徴とする。
【0018】
請求項5の発明は、請求項1から請求項4までのいずれか1項に記載された振動アクチュエータにおいて、周波数制御手段が、予め設定された一定時間における検出手段からの信号の平均値を用いて、相対運動の速度の変化率を求めることを特徴とする。
【0019】
請求項6の発明は、請求項1から請求項5までのいずれか1項に記載された振動アクチュエータにおいて、振動子が、矩形平板状の外形を有し、相対運動の方向と略平行な方向へ振動する第1の振動と、相対運動の方向と交差する方向へ振動する第2の振動とを発生することを特徴とする。
【0020】
さらに、請求項7の発明は、振動を発生することによって相対運動部材との間で相対運動を発生する振動子に印加される駆動電圧の周波数を、共振周波数へ向けて低下させる際に、相対運動を発生している時の前記振動子または相対運動部材から検出される相対運動の速度の変化率が予め定めた所定の値より小さくなった時の周波数よりも低い周波数への駆動電圧の周波数の設定を禁止することを特徴とする振動アクチュエータの駆動方法を提供する。
【0021】
【発明の実施の形態】
(第1実施形態)
以下、本発明にかかる振動アクチュエータの実施形態を、添付図面に基づいて詳細に説明する。なお、以降の実施形態の説明では、振動アクチュエータが、超音波の振動域を利用した超音波アクチュエータである場合を、例にとる。
【0022】
図1は、本実施形態の超音波アクチュエータ1の構成を示すブロック図である。同図に示すように、この超音波アクチュエータ1は、振動子2と駆動装置3とを備える。以下、これらの構成要素について、順次説明する。
【0023】
〔振動子2〕
図2は、本実施形態で用いる振動子2を、相対運動部材4とともに示す斜視図である。また、図3は、振動子2を、発生する振動波形例とともに示す説明図である。
図2および図3に示すように、本実施形態の振動子2は、弾性体5と、弾性体5の一方の平面に装着された圧電体6とを備える。
【0024】
弾性体5は、鉄鋼、ステンレス鋼、リン青銅またはエリンバー材等といった共振先鋭度が大きな金属材料により構成されることが望ましく、矩形平板状に形成される。また、弾性体5の各部の寸法は、発生する1次の縦振動L1および4次の曲げ振動B4それぞれの固有振動数が略一致するように、設定される。
【0025】
弾性体5の一方の平面には、後述する圧電体6が例えば接着される。また、弾性体5の他方の平面には、弾性体5の幅方向に2本の溝部が相対運動方向(図2おける両矢印方向)に関して所定距離だけ離れて設けられる。これらの溝部に、横断面形状が矩形である角棒型の、高分子材等を主成分とした摺動部材が嵌め込まれて装着され、突起状に突出して装着される。高分子材としては、PTFE、ポリイミド樹脂、PEN、PPS、PEEK等が例示される。
【0026】
そして、この摺動部材が駆動力取出部5a、5bとして機能する。したがって、弾性体5は、図示しない加圧部材に加圧されて、これら摺動部材からなる駆動力取出部5a、5bを介して相対運動部材4に加圧接触する。
【0027】
この駆動力取出部5a、5bは、図3に示すように、弾性体5に発生する4次の屈曲振動B4の4つの腹位置l1 〜l4 のうちの外側に位置する腹位置l1 、l4 に一致する位置に設けられる。なお、駆動力取出部5a、5bは、曲げ振動B4の腹位置l1 、l4 に正確に一致する位置に設けられる必要はなく、この腹位置の近傍に設けられていてもよい。
【0028】
圧電体6は、本実施形態ではPZT(チタンジルコン酸鉛)からなる薄板状の圧電素子により構成される。この圧電体6には、A相の駆動信号が入力される入力領域6a、6cと、A相の駆動信号とは位相が(π/2)だけずれたB相の駆動信号が入力される入力領域6b、6dとが形成される。各入力領域6a〜6dは、図3に示すように、弾性体5に発生する曲げ振動B4の5つの節位置n1 〜n5 により区画された4つの領域に連続して形成される。すなわち、駆動信号の入力により変形する各入力領域6a〜6dが、いずれも、不動点である節位置n1 〜n5 を跨がない。そのため、入力領域6a〜6dの変形が節位置n1 〜n5 によって抑制されることがない。これにより、各入力領域6a〜6dに入力された電気エネルギを最大の効率で弾性体5の変形、すなわち機械エネルギに変換することができる。
【0029】
また、曲げ振動B4の節位置n2 、n4 には、検出領域6p、6p’が設けられる。検出領域6p、6p’により、振動子2に発生する縦振動L1に起因した歪みが検出され、この歪みの大きさに応じた電気エネルギがピックアップ電圧として出力される。これにより、振動子2が発生する縦振動L1の振幅が求められる。
【0030】
各入力領域6a〜6dと各検出領域6p、6p’とは、それぞれの表面に、銀電極7a〜7d、7p、7p’を接着される。これにより、各入力領域6a〜6dに独立して駆動信号を入力したり、各検出領域6p、6p’から独立して検出信号であるピックアップ電圧を出力することができる。
図示しないが、各銀電極7a〜7d、7p、7p’には、電気エネルギの授受を行うためのリード線が、それぞれ半田付けされて、接続される。
【0031】
なお、本実施形態では、図3に示すように、振動子2は、その平面の中央部を中心として点対称となるように、形成される。これにより、駆動力取出部5a、5bに発生する楕円運動を略同じ形状とすることができ、相対運動方向の反転に伴う駆動差が殆ど解消される。
【0032】
後述する駆動装置3から、圧電体6の入力領域6a、6cに、縦振動L1および曲げ振動B4それぞれの固有振動数にほぼ一致した周波数を有するA相の駆動信号を入力する。また、入力領域6b、6dにはA相の駆動信号とは(π/2)の位相差を有するB相の駆動信号を入力する。すると、図3に示すように、弾性体5には、相対運動方向(図2における両矢印方向)へ振動する第1の振動である1次の縦振動L1と、この相対運動方向に直交する方向へ振動する第2の振動である4次の曲げ振動B4とが同時に発生する。
【0033】
これらの振動は合成されて、振動子2の駆動力取出部5a、5bには、左回りであって半周期ずれた楕円運動がそれぞれ発生する。発生した楕円運動により、加圧接触する相対運動部材4が左右いずれかの一方向へ直線的に駆動される。
また、相対運動方向を逆向きにするには、B相の駆動信号が、A相の駆動信号に対して(−π/2)の位相差を有するように設定すればよい。
【0034】
本実施形態では、振動子2は以上のように構成される。
また、図2に示すように、振動子2の駆動力取出部5a、5bに加圧接触して、移動子である相対運動部材4が配置される。
【0035】
相対運動部材4は、本実施形態ではステンレス鋼により帯板状に構成される。相対運動部材4は、駆動力取出部5a、5bに発生する楕円運動により、縦振動L1の振動方向と同方向(図3における左右方向)へ駆動される。なお、相対運動部材4は、銅合金やアルミニウム合金さらには高分子材等により構成されていてもよい。
【0036】
相対運動部材4は、相対運動部材4の一方の平面に接触する2基の搬送ローラと、相対運動部材4の幅方向の両端面に接触する4基の搬送ローラ(いずれも図示しない。)とにより、案内されて搬送される。これにより、相対運動部材4は、相対運動方向の両方向への往復移動が可能となる。
本実施形態では、相対運動部材4は以上のように構成される。
【0037】
〔駆動装置3〕
図1に示すように、本実施形態の駆動装置3は、発振手段8と、1/4分周器9と、電力増幅手段10a、10bと、特性値検出手段11と、周波数制御手段12と、速度制御手段13とを有する。以下、これらの要素について説明する。
【0038】
本実施形態では、発振手段8は発振回路により構成した。発振手段8は、振動子2の縦振動L1および曲げ振動B4それぞれに対応する駆動周波数fの4倍の周波数4fを有する駆動信号(矩形波)を出力する。発振手段8は、後述する周波数制御手段12から制御信号を入力されることにより、出力する駆動信号が有する駆動周波数を自在に変更することができる。
【0039】
本実施形態では、1/4分周器9は、発振手段8から出力された駆動信号を入力される。1/4分周回器9により、入力された駆動信号は、A相の駆動信号(正弦波)と、A相の駆動信号とは(π/2)の位相差を有するB相の駆動信号(正弦波)とに、それぞれ変換および分岐される。
【0040】
本実施形態では、電力増幅手段10として増幅回路を用いた。電力増幅手段10は、1/4分周器9により生成されたA相の駆動信号とB相の駆動信号とを、それぞれ、増幅する。すなわち、電力増幅手段10aにはA相の駆動信号が入力され、振動子2の駆動に必要な電圧に増幅される。また、電力増幅手段10bにはB相の駆動信号が入力され、振動子2の駆動に必要な電圧に増幅される。
【0041】
電力増幅手段10aの出力は、A相の駆動信号として、振動子2の入力領域6a、6cに入力される。また、電力増幅手段10bの出力は、B相の駆動信号として、振動子2の入力領域6b、6dに入力される。これにより、前述したように、振動子2の駆動力取出部5a、5bには、左回りであって半周期ずれた楕円運動がそれぞれ発生し、相対運動部材4との間で相対運動を発生する。
【0042】
本実施形態では、特性値検出手段11として、相対運動部材4に取り付けたエンコーダを用いた。特性値検出手段11は、相対運動を発生している時の振動子2の相対運動速度を検出する。
【0043】
図4は、相対運動を発生している時の振動子または相対運動部材から検出される各種の特性値の大きさと駆動周波数fとの関係例を示すグラフである。同図に示すグラフにおいて、実線は振動子2の入力領域6a〜6dに入力される駆動信号の電流値iを示し、破線は相対運動速度vを示し、さらに、一点鎖線は振動子2の検出領域6p、6p’で検出されるピックアップ電圧であり、振動子2に発生する縦振動L1に起因した歪みを示す。
【0044】
同図に示すグラフにおいて、駆動周波数fを、振動子2に発生する屈曲振動B4の共振周波数fBへ向けて低下させる。すると、破線で示す相対運動速度vは、共振周波数fBの近傍であって共振周波数fBよりも高い周波数f2に極大値を有することから、この極大値への到達により、駆動周波数fが共振周波数fBに接近したことを検出することができる。
【0045】
そこで、本実施形態では、特性値として、相対運動速度の変化率、すなわち相対運動部材4の移動速度の変化率を用いた。本実施形態で検出する相対運動速度の変化率は、振動子2自体の固体差や各種の動作環境といった変動要因が最終的に合成された、駆動状態を直接的に示す特性値である。したがって、本実施形態で特性値として用いる相対運動速度の変化率によれば、上記の変動要因それぞれの変動には影響されずに、振動子2の駆動状態を直接的かつ正確に検出することができる。このように、本実施形態では、特性値検出手段11により、相対運動速度に略比例する信号が出力される。
【0046】
本実施形態では、周波数制御手段12として周波数制御回路を用いた。周波数制御手段12には、特性値検出手段11から出力される信号と、発振手段8から出力される駆動信号の駆動周波数と、後述する速度制御手段13から出力される制御信号とが入力される。この周波数制御手段12は、特性値検出手段11から入力された信号、および発振手段8から入力された駆動信号の駆動周波数それぞれの変化を監視する。
【0047】
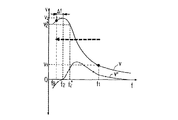
図5は、振動子2に入力される駆動周波数fを、屈曲振動B4の共振周波数fB よりも高い値f1 から屈曲振動B4の共振周波数fB へ向けて掃引したときに、相対運動速度vの変化率の一例を示すグラフである。このグラフにおいて、実線は相対運動速度vを示し、一点鎖線は相対運動速度の変化率v’を示す。
【0048】
図5のグラフに示すように、駆動信号の駆動周波数fを共振周波数fB より高い周波数f1 から共振周波数fB へ向けて掃引すると、最初に変化率v’は正の値を示すが、共振周波数fB に近づくにつれて速度変化率v’は減少する。そして、共振周波数fB に達する直前の周波数f2 において、変化率v’は零になる。さらに周波数を低下すると、変化率v’は負の値を示す。
本実施形態の周波数制御手段12は、この変化率v’が零になることによって、駆動信号の駆動周波数fが共振周波数fB に接近したことを検出する。
【0049】
そして、周波数制御手段12は、変化率v’が零になる周波数f2 を検出した時点で、周波数f2 よりも低い周波数への駆動周波数fの設定を禁止する信号を、発振手段8に出力する。これにより、発振手段8から出力される駆動信号の駆動周波数は、周波数f2 と同じか、または周波数f2 よりも大きな値に制御される。
【0050】
速度制御回路13は、図示しない外部から入力される速度設定入力の値と、特性値検出回路11から入力される速度情報の値とを比較する。そして、発振手段8から出力される駆動信号の駆動周波数をどのように変化させるかを指示する制御信号を、周波数制御手段12に出力する。
【0051】
本実施形態の駆動装置3は、以上のように構成される。次に、本実施形態の超音波アクチュエータ1の動作を説明する。
図1〜図3に示す本実施形態の超音波アクチュエータ1が、図5に示すように、駆動周波数f1 を有する駆動信号を入力されることにより、相対運動部材4との間で、速度v1 の相対運動を発生しているものとする。
【0052】
この状態で、相対運動速度を上昇するために、発振手段8から出力される駆動信号の駆動周波数fを高い周波数f1 から共振周波数fB へ向けて掃引すると、これに伴って、相対運動速度は上昇する。
【0053】
そして、駆動周波数fが周波数f2 (速度:v2 )に達すると、変化率v’は零になる。速度変化率v’が零になった時、周波数制御手段12から発振手段8へ、周波数f2 よりも低い周波数への駆動周波数fの設定を禁止する信号が出力される。これにより、発振手段8から出力される駆動信号の駆動周波数fは、周波数f2 に保持されるか、または周波数f2 よりも大きな値に変更される。
【0054】
このように、本実施形態によれば、駆動信号の駆動周波数fを共振周波数fB より高い周波数f1 から共振周波数fB へ向けて掃引しても、駆動周波数fは周波数f2 (=共振周波数fB +Δf)よりも小さな値にはならない。
【0055】
特に、本実施形態では、振動子2自体の固体差や各種の動作環境といった変動要因が最終的に合成されて現れる相対運動速度の変化率を特性値として用いて駆動状態を直接的に求めるため、上記の変動要因には影響されずに、駆動信号の駆動周波数fが共振周波数fB に接近したことを、確実に検出することができる。
【0056】
このため、駆動周波数fを高い値f1 から共振周波数fB へ向けて掃引する際に、駆動周波数fが共振周波数fB に一致することによって振動子2に過大なエネルギが入力されることを、確実に防止することができる。
【0057】
また、本実施形態によれば、駆動周波数fを設定できる範囲を、共振周波数fB に接近した周波数f2 以上とすることができる。すなわち、前述した従来の技術では、環境の変化分を見込む必要があったために、例えば図5における周波数f2'(f2'>f2 )よりも低い周波数に駆動周波数を設定することはできなかった。これに対し、本実施形態では、駆動周波数fを設定できる範囲を、低周波数側について、周波数f2'と周波数f2 との差(f2'−f2 )だけ拡大することができる。このため、本実施形態により、従来よりも相対運動速度の最高速度を、(v2 −v2')だけ引き上げることが可能となった。
【0058】
(第2実施形態)
次に、第2実施形態を説明する。なお、以降の各実施形態の説明は、前述した第1実施形態と相違する部分について行い、共通する部分については同一の図中符号を付すことにより重複する説明を省略する。
【0059】
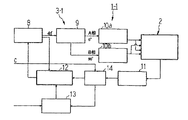
図6は、本実施形態の超音波アクチュエータ1−1の構成を示すブロック図である。本実施形態の超音波アクチュエータ1−1が、第1実施形態の超音波アクチュエータ1と相違するのは、周波数制御手段12が、平均値回路14から出力される相対運動速度の平均値を用いて、特性値の変化を求める点である。
【0060】
特性値検出手段11から出力される信号が、例えばノイズに影響されて、余り安定しなかったり誤検出された場合、この出力を特性値変化検出回路12に直接入力すると、特性値変化検出回路12が誤動作する可能性がある。そこで、本実施形態では、特性値検出手段11と特性値変化検出回路12との間に、平均値回路14を設ける。
【0061】
平均値回路14は、クロック信号cを入力されることにより、予め定めた一定時間における特性値検出回路12からの信号の平均値を演算することにより、特性値の変化率を検出する。そして、演算した平均値を周波数制御手段12に入力する。
【0062】
これ以外の構成は、第1実施形態と同様である。
本実施形態によれば、特性値検出手段11からの出力値が、不安定であったり誤検出を伴う場合にも、誤動作することなく、第1実施形態と同様の効果を得ることができる。
【0063】
(第3実施形態)
図7は、本実施形態の超音波アクチュエータ1−2の構成を示すブロック図である。本実施形態の超音波アクチュエータ1−2が、第1実施形態の超音波アクチュエータ1と相違するのは、特性値として、振動子2に発生する縦振動L1に起因した歪みを用いた点である。
【0064】
本実施形態では、特性値検出手段11−1として、振動子2に装着された圧電体6に形成された検出領域6p、6p’を用いた。特性値検出手段11は、相対運動を発生している時の振動子2の検出領域6p、6p’から出力されるピックアップ電圧、すなわち振動子2に発生する縦振動L1に起因した歪みを検出する。
前述した図4に示すグラフにおいて、駆動周波数fを共振周波数fB へ向けて低下させる。
【0065】
ここで、振動子2は、縦振動L1の共振周波数fLが屈曲振動B4の共振周波数fBよりも高い値になるように、設計されている。また、一点鎖線で示す、振動子2の検出領域6p、6p’で検出されるピックアップ電圧aは、共振周波数fBの近傍であって共振周波数fBよりも高い周波数f4に極大値を有する。この極大値を与える周波数f4が、縦振動L1の共振周波数fLである。
【0066】
したがって、この極大値を与える周波数f4への接近により、駆動周波数fが、屈曲振動B4の共振周波数fBおよび縦振動L1の共振周波数fLにそれぞれ接近したことを検出することができる。
【0067】
そこで、本実施形態では、特性値として、振動子2の検出領域6p、6p’から出力されるピックアップ電圧の変化率、すなわち振動子2に発生する縦振動L1に起因した歪みの変化率を用いた。本実施形態で検出するピックアップ電圧aは、振動子2自体の固体差や各種の動作環境といった変動要因が最終的に合成された、駆動状態を直接的に示す特性値である。したがって、本実施形態で特性値として用いるピックアップ電圧aの変化率a’も、上記の変動要因それぞれの変動には影響されずに、振動子2の駆動状態を直接的かつ正確に検出することができる。
【0068】
このように、本実施形態では、特性値検出手段11−1により、振動子2に発生する縦振動L1に起因した歪みに略比例するピックアップ電圧aが出力される。
これ以外の構成は、第1実施形態と同様である。
【0069】
図8は、振動子2に入力される駆動周波数fを、屈曲振動B4の共振周波数fB よりも高い値f3 から屈曲振動B4の共振周波数fB へ向けて掃引したときに、検出領域6p、6p’から出力されるピックアップ電圧aの変化率a’の一例を示すグラフである。このグラフにおいて、実線はピックアップ電圧aを示し、二点鎖線はピックアップ電圧aの変化率a’を示す。
【0070】
図8のグラフに示すように、駆動信号の駆動周波数fを共振周波数fB より高い周波数f3 から共振周波数fB へ向けて掃引すると、最初にピックアップ電圧aの変化率a’は正の値を示すが、共振周波数fB に近づくにつれてピックアップ電圧aの変化率a’は減少する。そして、周波数f4 (共振周波数fL )に達すると、ピックアップ電圧aの変化率a’は零になる。さらに周波数を低下すると、ピックアップ電圧aの変化率a’は負の値を示す。
【0071】
そこで、本実施形態の周波数制御手段12では、この周波数f4 よりも大きな値であってその変化率a’が正の値を示す周波数f5 を予め設定しておき、駆動周波数fがこの周波数f5 に到達したことを検出することによって、駆動信号の駆動周波数fが、屈曲振動B4の共振周波数fB および縦振動L1の共振周波数fL にそれぞれ接近したことを検出する。
【0072】
そして、周波数制御手段12は、周波数f5 を検出した時点で、周波数f5 よりも低い周波数への駆動周波数fの設定を禁止する信号を、発振手段8に出力する。これにより、発振手段8から出力される駆動信号の駆動周波数は、周波数f5 以上の値とされる。
【0073】
本実施形態の駆動装置3−2は、以上のように構成される。次に、本実施形態の超音波アクチュエータ1−2の動作を説明する。
図7に示す本実施形態の超音波アクチュエータ1−2が、図8に示すように、駆動周波数f3 を有する駆動信号を入力されることにより、相対運動部材4との間で、ピックアップ電圧がa3 である縦振動L1に起因した歪みを発生しているものとする。
【0074】
この状態で、ピックアップ電圧a3 を上昇するために、発振手段8から出力される駆動信号の駆動周波数fを高い周波数f3 から共振周波数fB へ向けて掃引すると、これに伴って、ピックアップ電圧aは増加する。
【0075】
そして、駆動周波数fが周波数f5 (ピックアップ電圧:a5 )に達すると、周波数制御手段12から発振手段8へ、周波数f5 よりも低い周波数への駆動周波数fの設定を禁止する信号が出力される。これにより、発振手段8から出力される駆動信号の駆動周波数fは、周波数f5 に保持されるか、周波数f5 よりも大きな値に変更される。
【0076】
このように、本実施形態によれば、駆動信号の駆動周波数fを共振周波数fB より高い周波数f3 から共振周波数fB へ向けて掃引しても、駆動周波数fは周波数f5 (=共振周波数fB +Δf)よりも小さな値にはならない。
したがって、本実施形態の超音波アクチュエータ1−2によれば、第1実施形態の超音波アクチュエータ1と同様の効果を得ることができる。
【0077】
(第4実施形態)
次に、第4実施形態を説明する。本実施形態は第3実施形態を改良したものである。
【0078】
図9は、本実施形態の超音波アクチュエータ1−3の構成を示すブロック図である。本実施形態の超音波アクチュエータ1−3が、第3実施形態の超音波アクチュエータ1−2と相違するのは、周波数制御手段12が、平均値回路14から出力される相対運動速度の平均値を用いて、特性値の変化を求める点である。
【0079】
特性値検出手段11から出力される信号が、例えばノイズに影響されて、あまり安定しなかったり誤検出された場合、この出力を特性値変化検出回路12に直接入力すると、特性値変化検出回路12が誤動作する可能性がある。そこで、本実施形態では、特性値検出手段11と特性値変化検出回路12との間に、第2実施形態と同様に、平均値回路14を設ける。
【0080】
平均値回路14は、クロック信号cを入力されることにより、予め定めた一定時間における特性値検出回路12からの信号の平均値を演算することにより、特性値の変化を検出する。そして、演算した平均値を周波数制御手段12に入力する。
【0081】
これ以外の構成は、第3実施形態と同様である。
本実施形態によれば、特性値検出手段11からの出力値が不安定であったり誤検出を伴う場合にも、誤動作することなく、第3実施形態と同様の効果を得ることができる。
【0082】
(変形形態)
各実施形態の説明では、振動アクチュエータが、超音波の振動域を利用した超音波アクチュエータである場合を例にとった。しかし、本発明は、超音波アクチュエータには限定されず、超音波以外の他の振動域を利用した振動アクチュエータについても同様に適用される。
【0083】
また、各実施形態の説明では、特性値が、共振周波数よりも高い周波数に極大値を有する場合を例にとった。しかし、本発明は、極大値の周波数の大きさには限定されず、相対運動を発生している時の振動子または相対運動部材から検出される特性値であれば、等しく用いることができる。
【0084】
また、各実施形態の説明では、特性値が、検出された相対運動速度の変化率または、検出された縦振動に起因した歪みの変化率である場合を例にとった。しかし、本発明は、相対運動速度の変化率または、縦振動に起因した歪みの変化率には限定されず、相対運動を発生している時の振動子または相対運動部材から検出される特性値であれば等しく適用される。このような特性値として、相対運動速度の変化率および、検出された縦振動に起因した歪みの変化率以外に、振動子に発生した振動と駆動電圧との間の位相差の変化率を例示することができる。
【0085】
また、第1実施形態の説明では、特性値が零になった時の周波数を求め、この周波数よりも低い周波数への駆動周波数の設定を禁止する場合を例にとった。しかし、本発明は、この形態には限定されない。例えば、第3実施形態に示すように、特性値が、零以外の予め定めた所定の値に達した時の周波数を求め、この周波数よりも低い周波数への駆動周波数の設定を禁止することとしてもよい。これにより、駆動周波数が共振周波数に一致することを、より確実に防止することができる。
【0086】
また、第1実施形態および第2実施形態の説明では、相対運動部材にエンコーダを装着して相対運動速度を検出したが、本発明は、この形態には限定されず、振動子にエンコーダを設けて相対運動速度を検出してもよい。
【0087】
また、第1実施形態および第2実施形態の説明では、相対運動速度の検出にエンコーダを用いたが、本発明は、この形態には限定されず、相対運動速度を検出することができる部材であれば、等しく適用される。
【0088】
また、各実施形態の説明では、駆動装置が、発振手段と、電力増幅手段と、特性値検出手段とを有する場合を例にとった。しかし、本発明は、この形態には限定されず、振動子に印加することによって振動を発生して相対運動部材との間で相対運動を生じる駆動電圧を発生することができる駆動装置であれば、等しく適用される。
【0089】
また、各実施形態の説明では、略矩形平板状の外形を有し、1次の縦振動と4次の屈曲振動とを発生する振動子を用いた場合を例にとった。しかし、本発明はこの振動子には限定されない。例えば、文献「VIBROMOTORS FORPRECISION MICROROBOTS」の第37頁における表2.8に開示された各種の振動子や、「新版 超音波モータ」(上羽貞行氏、富川義朗氏共著、トリケップス刊)に開示された円板状振動子、円環状振動子、棒状振動子、板状振動子さらにはリニア型振動子等の各種の振動子についても、等しく適用される。
【0090】
さらに、各実施形態の説明では、振動子に圧電素子が装着された場合を例にとったが、本発明は圧電素子には限定されず、電気エネルギと機械エネルギとの相互変換素子であれば、等しく用いることができる。圧電素子以外に、例えば電歪素子を用いることもできる。
【0091】
【発明の効果】
以上詳細に説明したように、請求項1〜請求項7の発明によれば、振動アクチュエータの駆動周波数を高い値から共振周波数へ向けて掃引する際に、振動子の固体差や負荷変動、さらには温度変化等が生じていても、駆動周波数が共振周波数に一致することによって振動子に過大なエネルギーが入力されることを確実に防止することができる。
【図面の簡単な説明】
【図1】第1実施形態の超音波アクチュエータの構成を示すブロック図である。
【図2】第1実施形態で用いる振動子を、相対運動部材とともに示す斜視図である。
【図3】第1実施形態で用いる振動子を、発生する振動波形例とともに示す説明図である。
【図4】相対運動を発生している時の振動子または相対運動部材から検出される各種の特性値の大きさと駆動周波数fとの関係例を示すグラフである。
【図5】第1実施形態において、振動子に入力される駆動周波数を、屈曲振動の共振周波数よりも高い値から屈曲振動の共振周波数へ向けて掃引したときに、相対運動速度の変化の一例を示すグラフである。
【図6】第2実施形態の超音波アクチュエータの構成を示すブロック図である。
【図7】第3実施形態の超音波アクチュエータの構成を示すブロック図である。
【図8】第3実施形態において、振動子に入力される駆動周波数を、屈曲振動の共振周波数よりも高い値から屈曲振動の共振周波数へ向けて掃引したときに、振動子に発生する縦振動の振幅の変化の一例を示すグラフである。
【図9】第4実施形態の超音波アクチュエータの構成を示すブロック図である。
【符号の説明】
1 超音波アクチュエータ
2 振動子
3 駆動装置
8 発振手段
9 1/4分周期
10a、10b 電力増幅手段
11 相対運動速度検出手段
12 周波数制御手段
13 速度制御回路
Claims (7)
- 駆動電圧を印加されることにより発生する振動によって相対運動部材との間で相対運動を生じる振動子と、
前記駆動電圧を発生する駆動装置とを備え、
該駆動装置は、前記振動子または前記相対運動部材から前記相対運動の速度を検出する検出手段と、前記駆動電圧の周波数を共振周波数へ向けて低下させる際に、前記相対運動の速度の変化率が予め定めた所定の値より小さくなった時の周波数よりも低い周波数への前記駆動電圧の周波数の設定を禁止する周波数制御手段とを有すること
を特徴とする振動アクチュエータ。 - 前記相対運動の速度は、前記共振周波数よりも高い周波数に極大値を有するとともに、前記予め定めた所定の値より小さくなった時の周波数は、前記極大値またはその近傍における周波数であること
を特徴とする請求項1に記載された振動アクチュエータ。 - 前記周波数制御手段は、前記駆動電圧の周波数を前記振動子の共振周波数へ向けて低下させること
を特徴とする請求項1または請求項2に記載された振動アクチュエータ。 - 前記駆動装置は、前記振動子に印加する前記駆動電圧の周波数を変更することができる発振手段と、
該発振手段からの出力信号を増幅する電力増幅手段とを有すること
を特徴とする請求項1から請求項3までのいずれか1項に記載された振動アクチュエータ。 - 前記周波数制御手段は、予め設定された一定時間における前記検出手段からの信号の平均値を用いて、前記相対運動の速度の変化率を求めること
を特徴とする請求項1から請求項4までのいずれか1項に記載された振動アクチュエータ。 - 前記振動子は、矩形平板状の外形を有し、前記相対運動の方向と略平行な方向へ振動する第1の振動と、前記相対運動の方向と交差する方向へ振動する第2の振動とを発生すること
を特徴とする請求項1から請求項5までのいずれか1項に記載された振動アクチュエータ。 - 振動を発生することによって相対運動部材との間で相対運動を発生する振動子に印加される駆動電圧の周波数を、共振周波数へ向けて低下させる際に、前記相対運動を発生している時の前記振動子または前記相対運動部材から検出される前記相対運動の速度の変化率が予め定めた所定の値より小さくなった時の周波数よりも低い周波数への前記駆動電圧の周波数の設定を禁止することを特徴とする振動アクチュエータの駆動方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP12740899A JP4345132B2 (ja) | 1999-05-07 | 1999-05-07 | 振動アクチュエータおよびその駆動方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP12740899A JP4345132B2 (ja) | 1999-05-07 | 1999-05-07 | 振動アクチュエータおよびその駆動方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2000324860A JP2000324860A (ja) | 2000-11-24 |
| JP2000324860A5 JP2000324860A5 (ja) | 2006-06-15 |
| JP4345132B2 true JP4345132B2 (ja) | 2009-10-14 |
Family
ID=14959248
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP12740899A Expired - Lifetime JP4345132B2 (ja) | 1999-05-07 | 1999-05-07 | 振動アクチュエータおよびその駆動方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4345132B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4770043B2 (ja) * | 2001-03-27 | 2011-09-07 | セイコーエプソン株式会社 | 圧電アクチュエータの駆動装置、圧電アクチュエータの駆動方法、時計および携帯機器 |
| US7396336B2 (en) | 2003-10-30 | 2008-07-08 | Sherwood Services Ag | Switched resonant ultrasonic power amplifier system |
-
1999
- 1999-05-07 JP JP12740899A patent/JP4345132B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000324860A (ja) | 2000-11-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4698580B2 (ja) | 近共振広範囲動作電気機械式モータ | |
| JP2006217716A (ja) | 超音波アクチュエータ駆動装置及び超音波アクチュエータ駆動方法 | |
| JP2010233316A (ja) | 超音波モータ | |
| US20050052095A1 (en) | Ultrasonic actuator driving apparatus and ultrasonic actuator driving method | |
| JP4345132B2 (ja) | 振動アクチュエータおよびその駆動方法 | |
| US8415903B2 (en) | Ultrasonic motor | |
| US5932952A (en) | Vibration motor having a two-phase drive of a longitudinal vibration and a bending vibration mode | |
| JPH02119586A (ja) | 超音波モータ装置 | |
| JPH10304687A (ja) | 振動型アクチュエータの駆動装置および振動型アクチュエータを駆動源とする装置 | |
| JP4482986B2 (ja) | 振動モータ及びその駆動方法 | |
| JPS6139870A (ja) | 圧電形直線モ−タ | |
| JP2002281770A (ja) | 圧電アクチュエータ | |
| CN100539385C (zh) | 用于超声电机的驱动装置 | |
| US5859490A (en) | Vibration actuator and driving apparatus | |
| JPH1052072A (ja) | 振動アクチュエータ | |
| JP2600760B2 (ja) | 超音波モータ | |
| JP2001078472A (ja) | 超音波モータの駆動装置及び超音波モータの駆動方法 | |
| JP3722165B2 (ja) | 振動アクチュエータの駆動装置及び振動アクチュエータの駆動方法 | |
| JPH11164574A (ja) | 振動アクチュエータ駆動装置 | |
| JP4529237B2 (ja) | 振動アクチュエータ | |
| JP4593266B2 (ja) | 振動子 | |
| JP2004336862A (ja) | 超音波モータの駆動回路およびアクチュエータ | |
| JP4691752B2 (ja) | 振動アクチュエータの駆動装置 | |
| JP4269739B2 (ja) | 振動波モータ | |
| JP4520570B2 (ja) | 圧電アクチュエータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060331 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060425 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080916 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081117 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090623 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090706 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120724 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150724 Year of fee payment: 6 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150724 Year of fee payment: 6 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150724 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |