JP4270614B2 - 観察物体の物理量を検出するための装置およびこれを用いた検出方法 - Google Patents
観察物体の物理量を検出するための装置およびこれを用いた検出方法 Download PDFInfo
- Publication number
- JP4270614B2 JP4270614B2 JP28610398A JP28610398A JP4270614B2 JP 4270614 B2 JP4270614 B2 JP 4270614B2 JP 28610398 A JP28610398 A JP 28610398A JP 28610398 A JP28610398 A JP 28610398A JP 4270614 B2 JP4270614 B2 JP 4270614B2
- Authority
- JP
- Japan
- Prior art keywords
- observation object
- image
- differential interference
- image information
- amount
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/2441—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures using interferometry
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
- G01B11/06—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness for measuring thickness ; e.g. of sheet material
- G01B11/0608—Height gauges
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/30—Measuring arrangements characterised by the use of optical techniques for measuring roughness or irregularity of surfaces
- G01B11/303—Measuring arrangements characterised by the use of optical techniques for measuring roughness or irregularity of surfaces using photoelectric detection means
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/0004—Microscopes specially adapted for specific applications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/36—Microscopes arranged for photographic purposes or projection purposes or digital imaging or video purposes including associated control and data processing arrangements
- G02B21/365—Control or image processing arrangements for digital or video microscopes
- G02B21/367—Control or image processing arrangements for digital or video microscopes providing an output produced by processing a plurality of individual source images, e.g. image tiling, montage, composite images, depth sectioning, image comparison
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Optics & Photonics (AREA)
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Microscoopes, Condenser (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
【発明の属する技術分野】
本発明は、微分干渉顕微鏡によって得られた観察物体の画像情報から観察物体の形状や観察物体の各観察点の座標,段差,位相変化等の物理量を検出するための装置およびこれを用いた検出方法に関する。
【0002】
【従来の技術】
微分干渉顕微鏡は、観察物体の位相変化や段差情報等を偏光干渉により可視化できることから、生体やICパターン等の微細構造の観察に広く用いられている。特に、近年磁気ディスクの表面に形成された磁気ヘッドの密着防止用微小突起(バンプ)の検査や、半導体のパターン露光に用いられる位相シフトレチクルの欠陥やリターデーション(位相差)量の測定、半導体ウエハーの位置決め装置等に微分干渉顕微鏡を用いる試みがなされている。
【0003】
例えば、特開平5−149719号公報および特開平7−248261号公報において、微分干渉顕微鏡をシァーリング干渉計及びマッハツェンダー干渉計と考えて、位相シフトレチクルの欠陥検出や位相測定に応用する方法が開示されている。また、特開平7−239212号公報では、微分干渉顕微鏡を用いて半導体ウエハー上の位置決めマークのエッジ部を検出して半導体ウエハーの位置決めを行う方法が開示されている。
【0004】
しかし、これらの方法は従来の干渉計測技術を微分干渉顕微鏡に応用したものであり、観察物体面での光の回折の影響は考慮されていない。また、観察物体における光の反射率や透過率の変化による光の強度変化に対する影響についての考慮もなされていない。
なお、これらの観察物体面上の光の回折や強度変化の影響については、特開平9−15504号公報において、本発明者が、微分干渉顕微鏡の結像特性を明らかにして、微分干渉顕微鏡によって得られた画像から観察物体の位相情報を抽出する方法を示した。
【0005】
【発明が解決しようとする課題】
微分干渉顕微鏡は観察物体面上の位相変化を画像における濃淡の分布に変換している。逆に、微分干渉画像における濃淡の分布を解析することにより、観察物体面上の位相変化を検出することができると考えられている。また、観察物体の段差のエッジ部は急激な位相変化を伴うことから、画像の濃淡値にも急激な変化が生じるので、微分干渉画像から濃淡値が急激に変化する部分を抽出することにより観察物体の段差の位置を検出できることが、特開平7−239212号公報等に示されている。
さらに、正常な標本の微分干渉画像をレファレンス画像とし、このレファレンス画像と観察物体像とを比較することで観察物体に混入した異物を検出する方法が、特開平5−256795号公報に示されている。
【0006】
ところで、微分干渉画像における濃淡の分布から観察物体の位相分布を求める場合には、観察物体における光の透過率や反射率の変化,照明光の強度変化等の観察物体の位相変化以外の要素が混ざると、観察物体の位相変化を正確に検出することができなくなる。
これらの問題は、予め観察する物体の情報をレファレンス画像として取得し、このレファレンス画像のデータを基にした観察物体の画像処理を行うことによって、ある程度解決することはできる。しかし、この方法はレファレンス画像との比較処理を行うために長い時間が必要になり、半導体等の検査では検査時間の短縮化が要望されている点を考慮すると好ましくない。
【0007】
また、観察物体の段差等のエッジ部の検出では、凸部から凹部に変わる部分と凹部から凸部に変わる部分とでは、微分干渉画像の濃淡の分布が反転する。従って、エッジ部を検出するには微分干渉画像において濃淡値の極大値と極小値の両方を検出しなくてはならない。
しかし、この場合、微分干渉画像を撮像する素子の検出特性や照明光の強度特性の変換により、検出特性が大きく変わってしまう。さらに、観察物体上の特定の領域での勾配を検出する場合には、微分干渉画像からは特定の値を検出することになり、特に外乱光の影響を受けやすくなるという問題がある。
【0008】
ところで、観察物体の段差等の位相量の変化を計測するとき、段差が比較的小さい場合には、微分干渉顕微鏡に干渉計測で用いられる縞走査を組み合わせることにより、観察物体の位相情報を抽出することができる。縞走査を行うときには、偏光成分のリターデーション量が異なる4枚の画像を撮像して演算しなければならず、処理時間を短縮化する課題の達成はできない。
また、偏光成分のリターデーション量が0のときとπのときとでは、画像の濃淡値が大きく変化するので、正確な位相量を検出するためにはダイナミックレンジの広い撮像素子が必要になり、装置が複雑になる。
なお、本発明者は、特開平9−15504号公報において、微分干渉顕微鏡の結像特性に着目し、微分干渉画像から位相情報と強度情報を分離する方法を示した。
【0009】
本発明は上記のような従来技術の問題点に鑑みてなされたものであり、その目的とするところは、観察物体の勾配,微小平面部,エッジ部,段差,位相変化量等の具体的な物理量を微分干渉顕微鏡によって得られる観察物体の微分干渉画像から位相情報と強度情報とを分離することにより、従来の方法よりも短時間で検出するための装置とこれを用いた検出方法を提供することにある。
【0010】
【課題を解決するための手段】
上記目的を達成するため、本発明による検出装置は、光源と、光源からの光を2つの偏光成分に分離するための部材を備えた光源からの光を観察物体に導くための照明光学系と前記照明光学系内で分離された2つの偏光成分を再構成するための部材を備えた観察物体の像を形成するための結像光学系とを有する微分干渉顕微鏡と、前記2つの偏光成分のリターデーション量を変化させる手段と、観察物体の像を撮像する手段と、この撮像手段により取り込まれた画像の演算を行う手段とを備えていることを特徴とする。
【0011】
そして、本発明の検出装置において、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる観察物体の2つの微分干渉画像を形成し、これら2つの微分干渉画像において夫々対応するの画素毎に差演算を行って差画像を取得し、この差画像から所定の範囲の画像情報を抽出する方法を行えば、観察物体の勾配が検出できる。
【0012】
また、本発明の検出装置において、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる観察物体の2つの微分干渉画像を形成し、これら2つの微分干渉画像において夫々対応する画素毎に差演算を行って差画像を取得し、この差画像における画像情報の絶対値を求め所定の閾値を設定し、閾値を越える画像領域を抽出する方法を行えば、観察物体上のエッジ部が検出できる。
【0014】
【発明の実施の形態】
本発明による検出装置は、光源と、光源からの光を2つの偏光成分に分離するための部材を備えた前記光源からの光を観察物体に導くための照明光学系と前記照明光学系内で分離された2つの偏光成分を再構成するための部材を備えた観察物体の像を形成するための結像光学系とを有する微分干渉顕微鏡と、前記2つの偏光成分のリターデーション量を変化させる手段と、観察物体の像を撮像する手段と、この撮像手段により取り込まれた画像の演算を行う手段とを備えて構成している。
【0015】
そして、本発明の検出装置において、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる観察物体の2つの微分干渉画像を形成し、これら2つの微分干渉画像において夫々対応する画素毎に差演算を行って差画像を取得し、この差画像から所定の範囲の画像情報を抽出することにより、観察物体の勾配が検出できる(第1の方法)。
【0016】
また、本発明の検出装置において、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる観察物体の2つの微分干渉画像を形成し、これら2つの微分干渉画像において夫々対応する画素毎に差演算および和演算を行って差画像と和画像を取得し、これら差画像と和画像における画像情報の比を演算し、得られた結果から所定の範囲の画像情報を抽出することによっても、観察物体の勾配が検出できる(第2の方法)。
【0017】
また、第1または第2の方法に従った演算の結果得られた画像情報から0値を中心に所定の範囲の画像情報を抽出すれば、観察物体上の位相変化のない部分または平面部分が検出できる(第3の方法)。
【0018】
さらに、第3の方法によって検出された観察物体の位相変化のない部分または平面部の面積または形状を、基準とする他の標本から予め求めた平面部の面積または形状と比較することにより、観察物体と標本との相違が検出できる(第4の方法)。
【0019】
また、本発明の検出装置を用いれば、観察物体上のエッジ部の検出も可能である。すなわち、本発明の検出装置において、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる観察物体の2つの微分干渉画像を形成し、これら2つの微分干渉画像において夫々対応する画素毎に差演算を行って差画像を取得し、この差画像における画像情報の絶対値を求め所定の閾値を設定し、閾値を越える画像領域を抽出することにより、観察物体上のエッジ部が検出できる(第5の方法)。
【0020】
本発明の装置において、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる観察物体の2つの微分干渉画像を形成し、これら2つの微分干渉画像において夫々対応する画素毎に差演算および和演算を行って差画像および和画像を取得し、差画像と和画像とにおいて各画素毎に画像情報の比を演算し、この結果から観察物体の画像情報の絶対値を求め所定の閾値を設定し、この閾値を越える画像情報を抽出することによっても、観察物体上のエッジ部の検出が可能になる(第6の方法)。
【0021】
また、本発明の検出装置において、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる観察物体の2つの微分干渉画像を形成し、これら2つの微分干渉画像において夫々対応するの画素毎に差演算を行って差画像を取得し、この差画像を差画像中の最大値と最小値の間の値で割り算した値の2乗を求め、所定の閾値を設定しこの閾値を越える画像領域を抽出することにより、観察物体上のエッジ部の検出が可能になる(第7の方法)。
【0022】
また、本発明の検出装置において、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる観察物体の2つの微分干渉画像を形成し、これら2つの微分干渉画像において夫々対応する画素毎に差演算および和演算を行って差画像および和画像を取得し、差画像と和画像において各画素毎に画像情報の比を演算し、この結果得られた画像情報を画像情報中の最大値と最小値との間の値で割り算し、さらにこの結果得られた値を2乗演算し所定の閾値を設定して、閾値を越える画像領域を抽出することにより、観察物体上のエッジ部の検出が可能になる(第8の方法)。
【0023】
さらに、第5乃至第8の方法に従って、前記閾値を越える画像領域の座標を求めることによっても、観察物体上のエッジ部の位置検出が可能になる(第9の方法)。
【0024】
また、第5乃至第8の方法に従って、前記閾値を越える画像領域に特に基準となる座標を設定すれば、観察物体上のエッジ部の位置検出がより高精度にできる(第10の方法)。
【0025】
第5乃至第8の方法に従って、前記閾値を越える画像領域の座標を求めることにより、観察物体上の各エッジ部の間隔も検出できる(第11の方法)。
【0026】
また、第5乃至第8の方法に従って、前記閾値を越える画像領域に特に基準となる座標を設定すれば、観察物体上の各エッジ部の間隔がより高精度に検出できる(第12の方法)。
【0027】
さらに、本発明の検出装置において、まず、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる2つの微分干渉画像を形成して、これら2つの微分干渉画像において夫々対応する画素毎に差演算および和演算を行って差画像情報および和画像情報を取得する。次に、前記検出した偏光成分のリターデーション量をθ、前記差画像情報をD(x,y)、前記和画像情報をS(x,y)、前記各画像情報に対応する観察物体面上の位相量をΦ(x,y)とするとき、次の条件式(1),(2) の何れかを用いて、前記2つの偏光成分の分離方向rに対応する観察物体面上の位相量の微分値∂Φ(x,y)/∂rを検出し、r方向の積分処理を行えば、観察物体上の位相量Φ(x,y)の検出が可能になる(第13の方法)。
∂Φ(x,y)/∂r=k・{(1−cosθ)・D(x,y)}/{2sinθ・S(x,y)} ・・・・(1)
∂Φ(x,y)/∂r=k・tan-1〔{(1−cosθ)・D(x,y)}/{2sinθ・S(x,y)}] ・・・・(2)
但し、前記kに関し、前記検出装置の光源から射出される光の波長をλとするとき、観察物体を透過観察する場合はk=λ/2π、観察物体を反射観察する場合はk=λ/4πである。
【0028】
また、本発明の検出装置において、まず、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる2つの微分干渉画像を形成して、これら2つの微分干渉画像において夫々対応する画素毎に差演算および和演算を行って差画像情報および和画像情報を取得する。次に、前記検出した偏光成分のリターデーション量をθ、前記差画像情報をD(x,y)、前記和画像情報をS(x,y)、前記各画像情報に対応する観察物体面上の位相量をΦ(x,y)、前記差画像情報D(x,y)を微分干渉顕微鏡の光学的応答特性を用いてデコンボリューションした画像情報をd(x,y)とするとき、次の条件式(3),(4) の何れかを用いることにより、観察物体面上の位相量Φ(x,y)が検出できる(第14の方法)。
Φ(x,y)=k・{(1−cosθ)・d(x,y)}/{2sinθ・S(x,y)} ・・・・(3)
Φ(x,y)=k・tan-1〔{(1−cosθ)・d(x,y)}/{2sinθ・S(x,y)}] ・・・・(4)
但し、前記kに関し、前記検出装置の光源から射出される光の波長をλとするとき、観察物体の透過観察の場合はk=λ/2π、観察物体の反射観察の場合はk=λ/4πである。
【0029】
本発明の検出装置において、まず、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる2つの微分干渉画像を形成して、これら2つの微分干渉画像において夫々対応する位置の画素毎に差演算および和演算を行って差画像情報および和画像情報を取得する。次に、前記検出した偏光成分のリターデーション量をθ、前記差画像情報をD(x,y)、前記和画像情報をS(x,y)、前記各画像情報に対応する観察物体面上の位相量をΦ(x,y)、前記差画像情報D(x,y)を微分干渉顕微鏡の光学的応答特性を用いてデコンボリューションした画像情報をd(x,y)、前記和画像情報S(x,y)中の極小値を包絡する画像情報をL(x,y)とするとき、次の条件式(5),(6) の何れかを用いることにより、観察物体上の位相量Φ(x,y)の検出が可能になる(第15の方法)。 Φ(x,y)=k・{(1−cosθ)・d(x,y)}/{2sinθ・L(x,y)} ・・・・(5)
Φ(x,y)=k・tan-1〔{(1−cosθ)・d(x,y)}/{2sinθ・L(x,y)}] ・・・・(6)
但し、前記kに関し、前記検出装置の光源から射出される光の波長をλとするとき、観察物体の透過観察の場合はk=λ/2π、観察物体の反射観察の場合はk=λ/4πである。
【0030】
本発明の検出装置において、まず、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる2つの微分干渉画像と、偏光成分のリターデーション量が0の微分干渉画像を形成し、前記偏光成分のリターデーション量が等しく符号の異なる2つの微分干渉画像において夫々対応する画素毎に差演算および和演算を行って差画像情報および和画像情報を取得する。次に、前記検出した偏光成分のリターデーション量をθ、前記偏光成分のリターデーション量が0の画像情報をO(x,y)、前記差画像情報をD(x,y)、前記和画像情報をS(x,y)、前記各画像情報に対応する観察物体面上の位相量をΦ(x,y)とするとき、次の条件式(7),(8) の何れかを用い、2つの偏光成分の分離方向rに対応する観察物体の位相量の微分値∂Φ(x,y)/∂rを検出し、r方向の積分処理を行うことにより、観察物体上の位相量Φ(x,y)が検出できる(第16の方法)。
∂Φ(x,y)/∂r=k・{(1−cosθ)・d(x,y)}/{2sinθ・B(x,y)} ・・・・(7)
∂Φ(x,y)/∂r=k・tan-1〔{(1−cosθ)・d(x,y)}/{2sinθ・B(x,y)}] ・・・・(8)
但し、前記kに関し、前記検出装置の光源から射出される光の波長をλとするとき、観察物体の透過観察の場合はk=λ/2π、観察物体の反射観察の場合はk=λ/4πである。また、B(x,y)=S(x,y)−2・O(x,y)である。
【0031】
本発明の検出装置において、まず、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる2つの微分干渉画像と、偏光成分のリターデーション量が0の微分干渉画像を形成し、前記偏光成分のリターデーション量が等しく符号の異なる2つの微分干渉画像において夫々対応する画素毎に差演算および和演算を行って差画像情報および和画像情報を取得する。次に、前記検出した偏光成分のリターデーション量をθ、前記偏光成分のリターデーション量が0の画像情報をO(x,y)、前記差画像情報をD(x,y)、前記和画像情報をS(x,y)、前記各画像情報に対応する観察物体面上の位相量をΦ(x,y)、前記差画像情報D(x,y)を微分干渉顕微鏡の光学的応答特性を用いてデコンボリューションした画像情報をd(x,y)とするとき、次の条件式(9),(10)の何れかを用いることにより、観察物体面上の位相量Φ(x,y)が検出できる(第17の方法)。
Φ(x,y)=k・{(1−cosθ)・d(x,y)}/{2sinθ・B(x,y)} ・・・・(9)
Φ(x,y)=k・tan-1〔{(1−cosθ)・d(x,y)}/{2sinθ・B(x,y)}] ・・・・(10)
但し、前記kに関し、前記検出装置の光源から射出される光の波長をλとしたとき、観察物体の透過観察の場合はk=λ/2π、観察物体の反射観察の場合はk=λ/4πである。また、B(x,y)=S(x,y)−2・O(x,y)である。
【0032】
本発明の検出装置において、まず、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる2つの微分干渉画像と、偏光成分のリターデーション量が0の微分干渉画像を形成し、前記偏光成分のリターデーション量が等しく符号の異なる2つの微分干渉画像において夫々対応する画素毎に差演算および和演算を行って差画像情報および和画像情報を取得する。次に、前記検出した偏光成分のリターデーション量をθ、前記偏光成分のリターデーション量が0の画像情報をO(x,y)、前記差画像情報をD(x,y)、前記和画像情報をS(x,y)、前記各画像情報に対応する観察物体面上の位相量をΦ(x,y)、前記差画像情報D(x,y)を微分干渉顕微鏡の光学的応答特性を用いてデコンボリューションした画像情報をd(x,y)、{S(x,y)−2・O(x,y)}中の極小値を包絡する画像情報をb(x,y)をとするとき、次の条件式(11),(12) の何れかを用いることにより、観察物体面上の位相量Φ(x,y)の検出ができる(第18の方法)。
Φ(x,y)=k・{(1−cosθ)・d(x,y)}/{2sinθ・b(x,y)} ・・・・(11)
Φ(x,y)/∂r=k・tan-1〔{(1−cosθ)・d(x,y)}/{2sinθ・b(x,y)}]・・・・(12)
但し、前記kに関し、前記検出装置の光源から射出される光の波長をλとするとき、観察物体の透過観察の場合はk=λ/2π、観察物体の反射観察の場合はk=λ/4πである。
【0033】
本発明者は、微分干渉顕微鏡の結像特性について、結像特性の導き方から結果までを特開平9−15504号公報において詳細に説明している。
微分干渉顕微鏡の特性は、微分干渉顕微鏡における像強度分布をI(x,y)、微分干渉顕微鏡内の2つの偏光成分のリターデーション量をθ、観察物体の光の透過(反射)率をT(x,y)、微分干渉顕微鏡の位相情報をP(x,y)、像の強度情報をA(x,y)とすると、簡略的に次の式(13)で表せる。
I(x,y,θ)=T(x,y){(1−cosθ) ・A(x,y)/2+sinθ・P(x,y)} ・・・・(13)
また、式(13)において−θのとき、
I(x,y,−θ)=T(x,y){(1−cosθ) ・A(x,y)/2−sinθ・P(x,y)} ・・・・(14)
となる。
【0034】
式(13),(14)から(13)−(14),(13)+(14)を計算すると、
I(x,y,θ)−I(x,y,−θ)
=2T(x,y)・sinθ・P(x,y) ・・・・(15)
I(x,y,θ)+I(x,y,−θ)
=T(x,y)・(1−cosθ)・A(x,y) ・・・・(16)
となる。
よって、差画像情報と和画像情報を形成することにより微分干渉画像から位相情報と像の強度情報とを分離することが可能になる。
【0035】
さらに、微分干渉画像から位相情報を抽出することにより、観察物体の位相変化に対応した画像情報を求めることができる。特に、微分干渉画像の位相情報は観察物体の位相分布の微分値と相関しているので、画像の位相情報から所定の値を抽出することにより、観察物体において所定の値に対応した勾配を検出することができる。
従って、前述の第1の方法に示したように、偏光成分のリターデーション量が等しく符号が異なる2つの微分干渉画像から差画像を取得し、この差画像から所定の範囲の画像情報を抽出することによって、観察物体の勾配を容易に検出することができる。そして、この方法をシステム化することにより観察物体の勾配を検出する装置を構成できる。
【0036】
ところで、観察物体の透過率(反射率)T(x,y)が比較的1に近い場合は、差画像情報を取得するだけで観察物体の勾配を十分正確に検出することができる。一般的な場合には、式(15)と式(16)の比を計算すると、T(x,y)の影響を除くことができる。
従って、第2の方法に示したように、差画像と和画像を取得しこれらの比を求めることにより、観察物体の光の透過率や反射率の影響を取り除いた上で、観察物体の勾配を検出することが可能である。また、この方法をシステム化することにより観察物体の勾配を検出する装置を構成できる。
【0037】
また、第3の方法で述べたように、第1または第2の方法によって得られた画像情報から値が0になる部分を中心に所定の範囲内の画像領域を抽出すると、位相勾配がほぼ0になる領域を抽出することができる。これは観察物体から位相変化のない部分又は平面部分を検出することと等価となる。なぜなら、観察物体に曲面や球面が存在する場合、その面頂近傍や位相変化が生じない部分も平面ととらえることができるからである。さらに、観察物体の曲面や球面等に摩耗や変形,変質が生じると、この曲面や球面等の面頂部分にも変化が生じる。
そこで、第3の方法に示したように、観察物体の位相変化のない部分または平面を検出することにより、観察物体の摩耗や変形,変質を検出することが可能になる。また、この方法をシステム化することで、観察物体の摩耗や変形,変質を検出する装置を構成できる。
【0038】
また、第4の方法に示すように、位相変化のない部分または平面部分の領域の面積や包絡する形状を決め、予め基準とした標本の面積や形状と比較することにより、観察物体の摩耗や変形,変質を量的に計測することが可能になる。さらに、相関検出を行うことにより、欠陥の検出も可能になる。
この方法を自動化すれば、第4の方法を実施する検出装置を構成できる。
【0039】
観察物体の具体的な例としては、磁気ディスク上に形成された磁気ヘッドの密着防止用のバンプと呼ばれる微小な突起や、ICチップ,ICのリードフレームに形成されている球状の導電体、半導体基板上に形成された球状の導電体等がある。
そこで、前述の第4の方法を適用することにより、観察物体が均質である場合には、変質した部分が検出されるので相対的な欠陥を検出することが可能になる。例えば、ディスプレイ等に用いられる液晶セルや電極の変質を検出することが可能である。
【0040】
また、段差のエッジ部を検出するために、微分干渉顕微鏡を用いることについては、特開平7−239212号公報に開示されている。しかし、これには微分干渉顕微鏡の結像特性については何ら示されておらず、段差部で生じる位相変化が干渉縞のコントラストを変えることからエッジ部が検出できるとしているだけである。実際に段差のエッジ部を顕微鏡で観察した場合、エッジ部で光が散乱していることが確認できる。この影響により、微分干渉顕微鏡で段差のエッジ部を観察すると、段差の凸部から凹部に変化する部分とその逆に凹部から凸部に変化する部分とでは像の濃淡が非対称になることが確認されている。
【0041】
これの原因は、微分干渉像にエッジ部の散乱光成分が付加されているためと考えることができる。よって、エッジ部の散乱光は偏光特性がなくなると考え、エッジ部の散乱光成分をN(x,y)とすると、前述の式(13)は、
I(x,y,θ)=T(x,y){(1−cosθ)・A(x,y)/2+sinθ・P(x,y)+N(x,y)}・・・・(17)
と表せる。式(17)式を用いても式(13)と同様に差画像情報は式(15)で表せる。
また、和画像情報については、
I(x,y,θ)+I(x,y,−θ)=T(x,y){(1−cosθ)・A(x,y)+2N(x,y)} ・・・・(18)
となるが、散乱光成分は像の強度成分と比較すると微弱と考えられるので、式(18)式に代えて近似的に式(16)を用いても問題はない。
【0042】
従って、差画像情報を抽出することにより、観察物体のエッジ部の位相変化に相関した位相情報を抽出することができる。具体的には、差画像から画像情報の極大値と極小値の両方を求め位相情報を抽出することにより、段差のエッジ部を検出することができる。抽出される位相情報は段差の凸部から凹部に変化する部分とその逆に凹部から凸部に変化する部分とでは像の濃淡の変化が対称であるため、第5の方法で示すように形成された差画像の画像情報の絶対値をとった画像情報を形成し、この画像情報から所定の閾値以上になる部分を抽出することにより、段差のエッジ部を検出することができる。
【0043】
また、第6の方法で示したように、取得した差画像と和画像から、各画素毎に差画像と和画像における像の画像情報の比を演算することにより、観察物体の光の透過率や反射率の悪影響を除去することができる。さらに、前記演算で求められた結果の絶対値をとり所定の閾値以上になる部分を形成した画像情報を求めることにより、段差のエッジ部を正確に検出することができる。
さらに、形成された差画像の各画素データを2乗し差画像情報の2乗画像を形成すると、段差のエッジ部のように急激に像の濃淡が変化する部分はさらに変化が大きくなる。よって、このようにすることで、所定の閾値を設定してその値以上の部分を検出する第6の方法の精度をより向上させることができる。
【0044】
撮像手段で取り込まれた画像は、通常各画素毎に0から255の256階調の整数データとして取り扱われる。差画像を形成する場合は−255から255の512階調の整数データになる。この整数データをそのまま2乗してもエッジ検出は良好に行える。さらに、エッジ検出の精度を向上させる方法としては、形成した差画像の最大値と最小値の間の値を設定し、この値で形成した差画像の画像データを割り算し、差画像の画像データを実数化する。これにより、差画像の画像データは1以下の領域と1以上の領域とから構成される。そして、閾値として1以上の値を設定することでエッジ検出の精度の向上が図れる。
従って、前述の第7の方法を用いることにより、段差のエッジ部をより精度よく検出することが可能になる。
【0045】
また、第8の方法で示したように、差画像と和画像とにおける像の画像情報の比を求め観察物体の光の透過率や反射率の悪影響を取り除いてから、形成された画像情報の最大値と最小値の間の値を用いて割り算した画像を形成することにより、撮像素子のノイズ等の影響を除去することができ、段差のエッジ部をより精度よく検出することが可能になる。
【0046】
また、第9の方法は第5乃至第8の方法の応用例である。この方法では、まず、撮像した画像上に座標系を設定し、検出したエッジ部の情報を画像上の座標に対応させる。そして、このエッジ部の座標が所定の座標に重なるまで相対的に観察物体を移動させることにより、観察物体の位置決めを行うことができる。
また、検出したエッジ部が特定の大きさをもちある程度の領域を占めるようになった場合には、その領域の座標系における2方向または1方向の中心または重心を求め、その中心値または重心値を代表点にすることで観察物体の位置決めを行うことができる。また、第9,第10の方法で示したように、差画像を形成したエッジ部を検出することにより、観察物体の位置決めを行うこともできる。
【0047】
位置決めと同様に、検出したエッジ情報から特定の2領域を設定し、その2領域の座標からその距離を計算し、結像光学系の光学倍率等のパラメータを用いて観察物体面上の距離に換算することで、観察物体面上の所定の2点間の距離を計測することができる。
従って、第11,第12の方法で示したように、差画像を形成しそのエッジ部を検出することにより、観察物体のエッジ間隔または長さを求めることができる。
【0048】
以上、第5乃至第12の方法についての説明をしたが、これらの方法を自動化すること等により検出装置として用いることは容易である。
また、偏光成分のリターデーション量が0のときの画像は、式(17)においてエッジ部での錯乱光成分N(x,y)を表していると考えられるので、和画像から偏光成分のリターデーション量が0の画像情報を2倍した画像を引いた画像を形成し、この画像を和画像と置き換えて差画像との比を求めることにより、より高精度のエッジ検出が行える。
【0049】
ところで、微分干渉顕微鏡に干渉計測で用いられている縞走査を組み合わせて観察物体の位相分布を計測する方法については、特開平5−149719号公報等に開示されている。通常、微分干渉顕微鏡に縞走査法を組み合わせた場合、偏光成分のリターデーション量が0、π/2、π、及び3π/2の4枚の微分干渉画像を取り込み、この4枚の微分干渉画像の各画素データを用いて、
tan-1[{I(π/2)−I(3π/2)]/[I(0)−I(π)}]
・・・・(19)
の演算を行うことで観察物体の位相情報を求めている。
【0050】
干渉計測における縞走査法は、観察物体表面での光の回折及び散乱は生じないことを前提としている。しかし、微分干渉顕微鏡は物体面で回折する光を微分干渉画像に変換しているために、式(13)で示したように、位相情報と強度情報の両方が組み合わされた形の画像が得られる。
偏光成分のリターデーション量θが±π/2の画像を取り込み、差画像と和画像を形成すると、差画像から式(19)の「I(π/2)−I(3π/2)」に相当する情報が得られる。
従って、微分干渉顕微鏡においては、θ=±π/2の画像を用いることにより、縞走査法と同様の情報が得られる。なお、任意のθに対しても同様の効果が得られる。
【0051】
よって、第13の方法に示したように、微分干渉顕微鏡で偏光成分のリターデーション量を検出しながら、偏光成分のリターデーション量が等しく符号の異なる2つの微分干渉像から差画像と和画像を形成し、これから各画素毎に像の比をとりそのtan-1の値を求めることで観察物体のシァー方向における位相量の微分値を検出することができる。さらに、その微分値のシァー方向の積分値を求めることで、より正確に観察物体の各点における位相量を定量測定することができる。
【0052】
また、観察する物体や微分干渉顕微鏡のシァー量により、微分干渉画像の濃淡が異なるので、濃淡が最良になるリターデーション量で画像を取り込み、位相検出することにより高精度の計測が可能となる。
検出する位相量が小さい場合には、tan-1の値を求めなくても近似的に位相量の微分値を求めることができ、さらに積分処理を行うことで位相量を求めることもできる。
この場合、2枚の微分干渉画像から観察物体の位相分布を求めることができるので、従来の縞走査法を用いるよりも計測時間を短縮することができる。
【0053】
また、微分干渉顕微鏡では、偏光成分のリタデーション量が0のときとπのときとでは、画像の濃淡の分布が大きく変わるので、縞走査法を用いる場合にはダイナミックレンジが非常に広い撮像素子が必要になる。
なお、本発明では、特に偏光成分のリターデーション量がπの画像を必要としないので、ダイナミックレンジが非常に広い撮像素子を用いなくても計測が可能である。
【0054】
微分干渉顕微鏡を用いて観察物体の位相分布を計測する場合、微分干渉顕微鏡の瞳径は有限であるため、観察物体で回折した光を全て画像情報として取得することはできない。微分干渉顕微鏡の結像特性は前述の式(13)で表される。また、位相情報P(x,y)と像の強度情報A(x,y)は次の式(20),(21)に示すように、夫々特有の光学的応答関数でコンボリューションされた形になっている。従って、観察物体の位相情報を正確に求めるためには微分干渉顕微鏡の光学的応答特性を考慮する必要がある。
【0055】
【数1】

【数2】
但し、
【数3】
【0056】
しかし、本発明では前述の第14の方法で述べたように、差画像を形成した後にその差画像を式(20)に示す微分干渉顕微鏡の位相情報に対応した光学的応答特性を用いてデコンボリューション処理を行い、和画像との差を求める等により積分処理を行わなくとも観察物体の位相量を正確に求めることができる。
【0057】
しかしながら、観察物体の位相量が弱位相領域より大きくなると式(21)の2項と3項の影響が大きくなりはじめる。観察物体の位相量を正確に求めるには、観察物体で回折散乱されない0次光を検出する必要がある。しかし、強度上は実際的には回折散乱された光と混ざった状態でしか検出できないので、強度情報から0次光成分を分離しなければならない。
【0058】
分離する方法としては、像の濃淡情報をフーリエ変換し低い周波数のみを抽出することにより、0次光成分を分離することができる。また、像の濃淡情報の中で0次光成分は極小値になる部分と考えられる。よって、第15の方法に示したように、和画像を形成することで像の濃淡情報を抽出して和画像の極小値を求め、その極小値を包絡する画像情報L(x,y)と差画像をデコンボリューションした画像情報d(x,y)との比を求めることで、観察物体の位相量の検出精度を向上させることができる。
【0059】
以上、第13乃至第15の方法について説明したが、これらの方法を自動化すること等により検出装置として用いることは容易である。そして、これにより検出時間の短縮化や、微分干渉画像を検出する撮像素子のダイナミックレンジの影響を受け難い等の効果が得られる。
【0060】
観察物体の位相変化が比較的大きく、段差等のエッジ部が存在する場合には、そのエッジ部で光の散乱が生じる。このエッジ部で生じる錯乱が位相検出の精度を低下させる原因となり得る。この影響をなくすために、第16の方法で述べたように、偏光成分のリターデーション量が0のときの画像と偏光成分のリターデーション量が±θのときの画像を各1枚ずつ計3枚を撮像し、偏光成分のリタデーション量が±θの画像から求められる差画像情報D(x,y),和画像情報S(x,y)とリターデーション量が0の画像情報O(x,y)とから、B(x,y)=S(x,y)−2・O(x,y)の値を求め、差画像情報D(x,y)とB(x,y)との比を求めることによりエッジ部の散乱光を除去することができる。
【0061】
また、第17の方法に示したように、第14の方法と同様にデコンボリューション処理を行うことにより、微分干渉顕微鏡の応答特性の影響を考慮した位相検出を行うことができる。また、第18の方法で述べたように、第15の方法と同様に画像情報の極小値を包絡する画像情報を形成し、差画像のデコンボリューション画像との比を求めることにより、エッジ部での散乱光の影響を考慮した位相検出を行うことができる。
【0062】
以下、本発明の実施例及び参考例を示し、本発明を詳細に説明する。
【0063】
第1実施例
本実施例は、磁気ディスク上に形成された磁気ヘッドの密着防止用微小突起(バンプ)の検出方法を示すものである。本実施例では、金属物体を観察するための落射型の微分干渉顕微鏡を組み込んだ検出装置を用いる。その概略を図1に示す。
【0064】
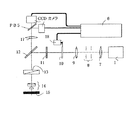
図1に示すように、本実施例で用いる検出装置は、光源1と、照明光学系2と結像光学系3とからなる微分干渉顕微鏡4と、微分干渉顕微鏡4で得られた像を撮像するCCDカメラ5と、CCDカメラ5で撮像された像を演算するマイクロコンピュータ6とにより構成する。
照明光学系2は、光源1側から順に、レンズ7,絞り8,レンズ9,偏光子10,1/4波長板11,ハーフミラー12,ノマルスキープリズム13,及び対物レンズ14を配置して構成している。また、結像光学系3は、観察物体15側から順に、対物レンズ14,ノマルスキープリズム13,ハーフミラー12,検光子16,及びレンズ17を配置して構成している。ハーフミラー12,ノマルスキープリズム13,対物レンズ14は照明光学系2と観察光学系3において共通である。
【0065】
図1に示した検出装置において、光源1から射出された光は偏光子10を介することにより偏光された後、1/4波長板11を透過し、ハーフミラー12により下方へ反射される。この反射光は、対物レンズ14の瞳位置に常光と異常光との分岐点がローカライズするように配置したノマルスキープリズム13を介し、対物レンズ14を透過することにより、観察物体15上で常光と異常光とが所定のシァー量だけ分離される。そして、観察物体15で反射された常光と異常光は、再度対物レンズ14を透過した後、ノマルスキープリズム13により再構成され、さらにハーフミラー12を透過した後、検光子16を透過することにより前記常光と異常光とが干渉し合い、レンズ17を介してCCDカメラ5の結像面に観察物体15の微分干渉像を形成する。
【0066】
ここで、偏光子10は光軸を中心として回転可能になっている。さらに、偏光子10にはパルスモータ18を接続しこれをマイクロコンピュータ6で制御可能にして、偏光子10の回転角度を自由に設定できるようにしてある。従って、マイクロコンピュータ6によりパルスモータ18の回転を制御することにより、偏光子10で偏光成分のリターデーション量を設定することができる。
また、1/4波長板11はその進相軸若しくは遅相軸が検光子16の偏光方向と一致するように固定されている。
【0067】
本実施例では、まず、観察物体15の代わりにレファレンスとなるミラーを置いて観察し、マイクロコンピュータ6を作動させて偏光子10を回転させながら像の濃淡分布を取り込み、偏光子10の回転角と偏光成分のリターデーション量の変化を求めておく。
次に、前記ミラーに代え観察物体15として磁気ディスクを置き、偏光子10を回転させ偏光成分のリターデーション量が所定の値θになるように設定し、磁気ディスクの画像を取り込む。なお、この場合の偏光成分のリターデーション量θについては、代表的な磁気ディスク等を観察し最適とされる値を設定しておく。
そして、偏光子10を偏光線分のリターデーション量が−θとなるように回転させ、画像を取り込む。取り込んだ前記2枚の画像から差画像を形成し位相情報を抽出する。さらに、前記差画像から0値近傍の部分を抽出し、この0値近傍の部分とそれ以外の部分とを2値化した画像を形成する。
【0068】
図2(a),(b)は夫々偏光成分のリターデーション量がθ,−θのときのバンプの微分干渉像を示している。また、同図(c)は位相情報の抽出のために形成した差画像(ここでは表示の都合上最大,最小値を256階調で示している)を示している。さらに、同図(d)は前記差画像から0値近傍の値を抽出し0値近傍部分とそれ以外の部分を2値化したときの画像を示している。
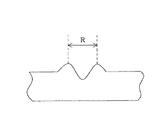
なお、前記磁気ディスク上に形成されているパンプの断面は図3に示すような形状をしている。従って、バンプの面頂部分では勾配が0となる。但し、バンプが磁気ヘッドにより摩耗または変形した場合には、面頂部分の平面部分が変形してくる。
【0069】
そして、本実施例では、図2(d)の2値化した画像から図4に示すように面頂部分のデータを最小近似する円Rを求めその半径または直径をパラメータ化することにより、バンプの摩耗の度合いを検出することができる。
また、磁気ディスクは光の反射率がほぼ一様であるため、差画像を形成するだけで位相情報が検出できる。しかし、光の反射率が一様でない観察物体に対してはさらに図2(a),(b)に示した像の和画像を形成し、この和画像と前記差画像において夫々対応する各画素データ毎の比をとった画像情報を形成することにより光の反射率の変化による影響を除去できる。
【0070】
本実施例では磁気ディスクのバンプを検出する方法について説明したが、本実施例で示した検出方法はバンプ検出に限定されるものではない。例えば、ICチップまたはリードフレーム上に形成されたBGA(ボールグリットアレイ)の球状の半田を検査する方法としても用いることができる。この場合、球状の半田の大きさが変化した場合には面頂部分の面積も変化するので、平面部分を検出して近似する円の半径や面積をパラメータ化することにより球状半田の大きさを検出することができる。また、形状の変化や欠陥も面頂を検出することによって可能になる。
【0071】
また、本実施例では落射型の微分干渉顕微鏡を組み込んだ検出装置を用いたが、透過型の微分干渉顕微鏡を用いれば、透過標本の均質部分の検出を行うことができる。なお、この場合、均質部分を検出することにより、逆に均質ではない部分を検出することもできる。
【0072】
第2実施例
本実施例は、半導体ウエハーの位置合わせ用凹凸標本(ボックスマーク)のエッジ検出の方法を示すものである。検出装置は、第1実施例と同様に図1に示した落射型の微分干渉顕微鏡を組み込んだものを用いる。
【0073】
まず、図1に示した検出装置において、マイクロコンピュータ6を操作して偏光子10を回転させて偏光成分のリターデーション量を変化させ、偏光成分のリターデーション量がθと−θの画像を取り込む。次に、この2枚の画像から差画像を形成し、この差画像の絶対値を求め所定の閾値を設定し、この閾値を基に閾値以上の部分と閾値以下の部分とで画像の2値化を行う。
【0074】
図5(a),(b)は夫々偏光成分のリターデーション量がθと−θの凹凸標本の微分干渉画像を示している。また、同図(c)は位相情報を抽出するために形成した差画像(ここでは表示の都合上最大,最小値を256階調で示している)を示している。同図(d)は前記差画像の絶対値をとって閾値を設定し、この閾値を基に閾値以上の部分と閾値以下の部分とで2値化した画像を示している。
【0075】
本実施例の検出方法によれば、図5(d)に示した画像から凹凸標本のエッジ部を検出することができる。そして、その画像上にx−y座標を設定し、凹凸標本を画像上のx−y座標に対応して2次元的に移動可能なステージに載せることにより凹凸標本の位置決めが可能になる(図6)。
さらに、図6に示した画像において、エッジ部の間隔を計測することにより凹凸標本の長さを計測することができる。
【0076】
ここで、エッジ部の位置検出の精度を向上させる方法としては、前記画像上のx−y座標において前述の方法により求めた閾値以上の領域の基準位置を求め、その基準位置をエッジ部の代表点とする方法や、閾値以上の領域における像の濃淡値の極大値を検出してこれを基準にしてエッジ部の座標を設定する方法がある。
【0077】
本実施例では差画像の絶対値をとる例を示したが、差画像の最大値と最小値の間に所定の値を設定し、この値で差画像を割り算してもよい。これにより、差画像が±1以上の領域と±1以下の領域に分離できる。そして、差画像の各画素データの値を2乗することにより、前記±1以上の領域は像の濃淡値が1以上のより大きい値に、±1以下の領域は像の濃淡値が1以下のより小さい値になり、エッジ部の信号をより急峻にすることができ、エッジ検出の精度を向上させることができる。
【0078】
さらに、凹凸標本も磁気ディスクと同様に光の反射率がほぼ一様であるため、差画像を形成するだけでも位相情報の抽出は可能である。しかし、光の反射率が一様でない凹凸標本に対しては、図5(a),(b)に示した2枚の画像の和画像を形成し、差画像と和画像において各画素データ毎の比をとった画像情報を形成することにより、光の反射率の変化による影響を除去できる。なお、この方法は、ICパターンの位置決めや長さ計測に応用することができる。
【0079】
また、本実施例の検出方法では、透過型の微分干渉顕微鏡を用いることにより、液晶の透明電極の位置決めや、透明電極の間隔計測等に応用することができる。
【0080】
参考例
本参考例は、位相物体の位相量の計測について位相格子を用いた検出方法を示すものである。本参考例では、透過型の微分干渉顕微鏡を組み込んだ検出装置を用いる。その概略を図7に示す。
【0081】
図7に示すように、本参考例で用いる検出装置は、光源21と、照明光学系22と結像光学系23とからなる微分干渉顕微鏡24と、微分干渉顕微鏡24で得られた像を撮像するCCDカメラ25と、CCDカメラ25で撮像された像を演算するマイクロコンピュータ26とにより構成する。
照明光学系22は、レンズ27,絞り28,レンズ29,偏光子30,1/4波長板31,ノマルスキープリズム32,及びコンデンサーレンズ33からなっている。また、観察光学系23は、対物レンズ34,ノマルスキープリズム35,検光子36,及びレンズ37を配置して構成している。
【0082】
図7に示した検出装置において、光源21から射出された光は偏光子30により偏光された後、1/4波長板31を透過しコンデンサーレンズ33の瞳位置に常光と異常光との分岐点がローカライズするように配置したノマルスキープリズム32によりコンデンサーレンズ33を介して観察物体15上で常光と異常光とを所定のシァー量だけ分離させる。観察物体15を透過した常光と異常光は対物レンズ34を透過した後、対物レンズ34の瞳位置に前記常光と異常光との合波点がローカライズするように配置したノマルスキープリズム35により再構成され、さらに検光子36を透過する際に前記常光と異常光とが互いに干渉し合い、レンズ37を介してCCDカメラ25の結像面に観察物体15の微分干渉像を形成する。
【0083】
本参考例では、光源21内には干渉フィルタを配置し、射出される照明光が波長550nmの準単色光になるように設定している。
また、偏光子30は光軸を中心として回転可能になっている。さらに、偏光子30にはパルスモータ38を接続しこれをマイクロコンピュータ26で制御可能にして、偏光子30の回転角度を自由に設定できるようにしてある。従って、マイクロコンピュータ26によりパルスモータ38の回転を制御することにより、偏光子30で偏光成分のリターデーション量を設定することができる。
1/4波長板31はその進相軸若しくは遅相軸が検光子36の偏光方向と一致するように固定されている。
【0084】
まず、本参考例では、均一的な位相物体を観察し、偏光子30を回転させながら像の濃淡分布を取り込み、偏光子30の回転角と偏光成分のリターデーション量の変化を求めておく。
次に、偏光成分のリターデーション量がθになるように偏光子30を回転させて観察物体15の画像を取り込む。なお、このときの偏光子30の回転角をマイクロコンピュータ26で検出し、同時にこのときの偏光成分のリターデーション量もマイクロコンピュータ26で記憶する。同様に、偏光成分のリターデーション量が−θになるように偏光子30を回転させて観察物体15の画像を取り込む。また、このときの偏光子30の回転角をマイクロコンピュータ26で検出し、同時にこのときの偏光成分のリターデーション量もマイクロコンピュータ26で記憶する。そして、取り込んだ偏光成分のリターデーション量がθと−θである2枚の画像から差画像と和画像を形成する。
さらに、形成した差画像をマイクロコンピュータ26において図8に示す微分干渉顕微鏡の光学的応答特性を用いてデコンボリューションして、新たに光学的応答関数を考慮した位相情報画像を形成する。その後、形成された各画像情報を前記和画像で割り算し、tan-1の値を求め、検出した偏光成分のリターデーション量θから求めた以下の値を掛けて位相分布に変換する。
【0085】
k・(1−cos θ)/2sinθ 但しk=λ/2π(λ=550nm)
・・・・(22)
【0086】
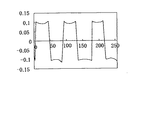
図9(a),(b)は夫々偏光成分のリターデーション量がθ,−θである位相物体の画像を示している。図9(c),(d)は同図(a),(b)に示した画像により形成された差画像,和画像を示している。図9(e)はこのときの位相分布の再現図(格子の断面図)を示している。
また、参考までに従来の縞走査法を用いてデコンボリューション処理を行った位相分布を再現した格子の断面図を図10に示す。
【0087】
以上のように、本参考例によれば、偏光成分のリターデーション量が±θの2つの画像から従来の縞走査法による測定と同等の観察物体の位相分布が求められることが分かる。特に、従来の縞走査法を用いる場合では偏光成分のリターデーションが異なる4つの画像が必要になるのに対し、本参考例では偏光成分のリターデーション量が異なる2つの画像を用いるのみで従来の方法と同様に位相分布を求めることができるので、計測時間を短縮することができる。
【0088】
ところで、本参考例の検出方法において、予め観察する物体の位相量が比較的小さいことが分かっている場合には、tanφ=φの近似が成り立つので、tan-1の値を求める処理を省略することができ、計測時間をさらに短縮することができる。そして、差画像と和画像との比を求めた後の画像をデコンボリューション処理しても同様の結果が得られる。
【0089】
また、微分干渉顕微鏡の光学的応答特性は、照明光学系の明るさ絞りの径の大きさにより特性が変わる。観察物体によっては位相分布が特定の空間周波数帯域に偏る場合がある。このような物体の位相検出を行うときには、明るさ絞りの径を適当な大きさに設定することにより、応答特性を1に近い値のまま維持できるので、デコンボリューション処理を行わなくても位相分布を正確に求めることができる。
【0090】
本参考例では、偏光成分のリターデーション量の検出を偏光子30の回転角を検出することにより行っているが、検出装置に偏光成分のリターデーション量を検出する手段を付加し、この検出手段からの信号を用いて偏光成分のリターデーション量を求めてもよい。
また、偏光成分のリターデーション量を変化させる場合、偏光子30を回転させる方法だけではなく、偏光子30と1/4波長板31との間に液晶素子を挿入し、液晶素子の印加電圧を変化させる方法や、偏光子30と1/4波長板31との間に1/2波長板を挿脱可能に配置する方法等を用いても同様の効果が得られる。
【0091】
また、本参考例では透過観察を行う例を示しているが、図1に示した落射型の微分干渉顕微鏡を用いても同様の位相分布を求めることができる。但し、落射型のものを用いる場合には、観察物体が金属等の反射物体である場合、検出される位相分布が2倍の値になる。従って、このような場合には、前述の式(22)においてk=λ/4πとして位相分布を求めることが必要である。
【0092】
本参考例では、偏光成分のリターデーション量が±θの2つの画像から観察物体の位相分布を求める具体的な方法を示しているが、同様に、偏光成分のリターデーション量が±θの2つの画像と偏光成分のリターデーション量が0の画像を取り込み、図9(d)に示した画像から偏光成分のリターデーション量が0の画像情報の2倍を引き算してB(x,y)を求め(但しB(x,y)=S(x,y)−2・O(x,y))、図9(c)に示した差画像とB(x,y)との比を形成することにより、観察物体のエッジ部の光の散乱の影響を考慮した位相分布を検出することができる。
【0093】
以上、本発明では第1及び第2実施例並びに参考例を示して説明したように、撮像手段(CCDカメラ)を1台にし、偏光成分のリターデーション量を変化させながら画像を撮像する方法について述べてきた。しかし、本発明の意図は1台の撮像手段を使用することに限定されることはなく、2台の撮像手段を用いても同様の効果を得ることができる。
【0094】
例えば、図11,12に示しように、検光子に代えて観察光学系中にPBS(偏光ビームスプリッタ)を配置して2つの直交する2偏光成分に分離し、夫々の偏光成分をCCDカメラで受光するようにしてもよい。このようにすることにより、2つのCCDカメラの結像面には夫々偏光成分のリターデーション量が等しく符号の異なる微分干渉画像が形成される。
よって、この2台のCCDカメラからの画像を演算することにより、観察物体の勾配,平面部,複屈折部分、歪み,段差のエッジ部分,位相分布等の物理量を検出することができる。
【0095】
以上説明したように、本発明は、特許請求の範囲に記載した特徴と併せ、以下の(1)〜(15)に示す特徴も有している。
【0096】
(1)請求項1に記載の検出装置において、照明光学系内で分離された2つの偏光成分リターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる観察物体の2つの微分干渉画像を形成し、これら2つの微分干渉画像において夫々対応する画素毎に差演算および和演算を行って差画像と和画像を取得し、これら差画像と和画像とにおける像の画像情報の比を演算し、得られた結果から所定の範囲の画像情報を抽出することにより、観察物体の勾配を検出する方法。
【0097】
(2)請求項2または前記(1)に記載の方法に従った演算の結果得られた画像情報から0値を中心に所定の範囲の画像情報を抽出することにより、観察物体上の位相変化のない部分または平面部分を検出する方法。
【0098】
(3)前記(2)に記載の方法によって検出された観察物体の位相変化のない部分または平面部の面積または形状を、基準とする標本から予め求めた平面部の面積または形状と比較することにより、観察物体と標本との相違を検出する方法。
【0099】
(4)請求項1に記載の検出装置において、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる観察物体の2つの微分干渉画像を形成し、これら2つの微分干渉画像において夫々対応する画素毎に差演算および和演算を行って差画像および和画像を取得し、差画像と和画像とにおいて各画素毎に比を演算し、この結果から観察物体の画像の絶対値を求め、所定の閾値を設定し、この閾値を越える画像情報を抽出することにより、観察物体上のエッジ部を検出する方法。
【0100】
(5)請求項1に記載の検出装置において、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる観察物体の2つの微分干渉画像を形成し、これら2つの微分干渉画像において夫々対応する画素毎に差演算を行って差画像を取得し、この差画像を差画像中の最大値と最小値の間の値で割り算した値の2乗を求め、所定の閾値を設定しこの閾値を越える画像領域を抽出することにより、観察物体上のエッジ部を検出する方法。
【0101】
(6)請求項1に記載の検出装置において、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる観察物体の2つの微分干渉画像を形成し、これら2つの微分干渉画像において夫々対応する画素毎に差演算および和演算を行って差画像および和画像を取得し、差画像と和画像とにおいて各画素毎に比を演算し、この結果得られた画像情報をその画像情報の最大値と最小値との間の値で割り算し、さらにこの結果得られた値を2乗演算し所定の閾値を設定して、閾値を越える画像領域を抽出することにより、観察物体上のエッジ部を検出する方法。
【0102】
(7)請求項4または前記(4)乃至(6)に記載の方法に従って、前記閾値を越える画像領域の座標を求めることにより、観察物体上のエッジ部の位置検出を行う方法。
【0103】
(8)請求項4または前記(4)乃至(6)に記載の方法に従って、前記閾値を越える画像領域の中心または重心を求めることにより、観察物体上のエッジ部の位置検出を行う方法。
【0104】
(9)請求項4または前記(4)乃至(6)に記載の方法に従って、前記閾値を越える画像領域の座標を求めることにより、観察物体上の各エッジ部の間隔を検出する方法。
【0105】
(10)請求項4または前記(4)乃至(6)に記載の方法に従って、前記閾値を越える画像領域の中心または重心を求めることにより、観察物体上の各エッジ部の間隔の検出を行う方法。
【0106】
(11)請求項1に記載の検出装置において、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる2つの微分干渉画像を形成して、これら2つの微分干渉画像において夫々対応する画素毎に差演算および和演算を行って差画像情報および和画像情報を取得し、前記検出した偏光成分のリターデーション量をθ、前記差画像情報をD(x,y)、前記和画像情報をS(x,y)、前記各画像情報に対応する観察物体面上の位相量をΦ(x,y)、前記差画像情報D(x,y)を微分干渉顕微鏡の光学的応答特性を用いてデコンボリューションした画像情報をd(x,y)とするとき、次の条件式の何れかを用いることにより、観察物体面上の位相量Φ(x,y)を検出を行う方法。
Φ(x,y)=k・{(1−cosθ)・d(x,y)}/{2sinθ・S(x,y)}
Φ(x,y)=k・tan-1〔{(1−cosθ)・d(x,y)}/{2sinθ・S(x,y)}]
但し、前記kに関し、前記検出装置の光源から射出される光の波長をλとするとき、観察物体の透過観察の場合はk=λ/2π、観察物体の反射観察の場合にk=λ/4πである。
【0107】
(12)請求項1に記載の検出装置において、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる2つの微分干渉画像を形成して、これら2つの微分干渉画像において夫々対応する画素毎に差演算および和演算を行って差画像情報および和画像情報を取得し、前記検出した偏光成分のリターデーション量をθ、前記差画像情報をD(x,y)、前記和画像情報をS(x,y)、前記各画像情報に対応する観察物体面上の位相量をΦ(x,y)、前記差画像情報D(x,y)を微分干渉顕微鏡の光学的応答特性を用いてデコンボリューションした画像情報をd(x,y)、前記和画像情報S(x,y)中の像の濃淡値の極小値を包絡する画像情報L(x,y)をとするとき、次の条件式の何れかを用いることにより、観察物体上の位相量Φ(x,y)を検出する方法。
Φ(x,y)=k・{(1−cosθ)・d(x,y)}/{2sinθ・L(x,y)}
Φ(x,y)=k・tan-1〔{(1−cosθ)・d(x,y)}/{2sinθ・L(x,y)}]
但し、前記kに関し、前記検出装置の光源から射出される光の波長をλとするとき、観察物体の透過観察の場合はk=λ/2π、観察物体の反射観察の場合はk=λ/4πである。
【0108】
(13)請求項1に記載の検出装置において、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる2つの微分干渉画像と偏光成分のリターデーション量が0の微分干渉画像を形成し、前記偏光成分のリターデーション量が等しく符号の異なる2つの微分干渉画像において夫々対応する画素毎に差演算および和演算を行って差画像情報および和画像情報を取得し、前記検出した偏光成分のリターデーション量をθ、前記偏光成分のリターデーション量が0の画像情報をO(x,y)、前記差画像情報をD(x,y)、前記和画像情報をS(x,y)、前記各画像情報に対応する観察物体面上の位相量をΦ(x,y)とするとき、次の条件式の何れかを用いて、前記2つの偏光成分の分離方向rに対応する観察物体の位相量の微分値∂Φ(x,y)/∂rを検出し、r方向の積分処理を行うことにより、観察物体上の位相量Φ(x,y)の検出を行う方法。
∂Φ(x,y)/∂r=k・{(1−cosθ)・d(x,y)}/{2sinθ・B(x,y)}
∂Φ(x,y)/∂r=k・tan-1〔{(1−cosθ)・d(x,y)}/{2sinθ・B(x,y)}]
但し、前記kに関し、前記検出装置の光源から射出される光の波長をλとするとき、観察物体の透過観察の場合はk=λ/2π、観察物体の反射観察の場合はk=λ/4πである。また、B(x,y)=S(x,y)−2・O(x,y)である。
【0109】
(14)請求項1に記載の検出装置において、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる2つの微分干渉画像と偏光成分のリターデーション量が0の微分干渉画像を形成し、前記偏光成分のリターデーション量が等しく符号の異なる2つの微分干渉画像において夫々対応する画素毎に差演算および和演算を行って差画像情報および和画像情報を取得し、前記検出した偏光成分のリターデーション量をθ、前記偏光成分のリターデーション量が0の画像情報をO(x,y)、前記差画像情報をD(x,y)、前記和画像情報をS(x,y)、前記各画像情報に対応する観察物体面上の位相量をΦ(x,y)、前記差画像情報D(x,y)を微分干渉顕微鏡の光学的応答特性を用いてデコンボリューションした画像情報をd(x,y)とするとき、次の条件式の何れかを用いることにより、観察物体面上の位相量Φ(x,y)を検出を行う方法。
Φ(x,y)=k・{(1−cosθ)・d(x,y)}/{2sinθ・B(x,y)}
Φ(x,y)=k・tan-1〔{(1−cosθ)・d(x,y)}/{2sinθ・B(x,y)}]
但し、前記kに関し、前記検出装置の光源から射出される光の波長をλとしたとき、観察物体の透過観察の場合はk=λ/2π、観察物体の反射観察の場合はk=λ/4πである。また、B(x,y)=S(x,y)−2・O(x,y)である。
【0110】
(15)請求項1に記載の検出装置において、照明光学系内で分離された2つの偏光成分のリターデーション量を検出して偏光成分のリターデーション量が等しく符号の異なる2つの微分干渉画像と偏光成分のリターデーション量が0の微分干渉画像を形成し、前記偏光成分のリターデーション量が等しく符号の異なる2つの微分干渉画像において夫々対応する画素毎に差演算および和演算を行って差画像情報および和画像情報を取得し、前記検出した偏光成分のリターデーション量をθ、前記偏光成分のリターデーション量が0の画像情報をO(x,y)、前記差画像情報をD(x,y)、前記和画像情報をS(x,y)、前記各画像情報に対応する観察物体面上の位相量をΦ(x,y)、前記差画像情報D(x,y)を微分干渉顕微鏡の光学的応答特性を用いてデコンボリューションした画像情報をd(x,y)、{S(x,y)−2・O(x,y)}中の像の濃淡値の極小値を包絡する画像情報をb(x,y)とするとき、次の条件式の何れかを用いることにより、観察物体面上の位相量Φ(x,y)の検出を行う方法。
Φ(x,y)=k・{(1−cosθ)・d(x,y)}/{2sinθ・b(x,y)}
Φ(x,y)/∂r=k・tan-1〔{(1−cosθ)・d(x,y)}/{2sinθ・b(x,y)}]
但し、前記kに関し、前記検出装置の光源から射出される光の波長をλとするとき、観察物体の透過観察の場合はk=λ/2π、観察物体の反射観察の場合はk=λ/4πである。
【0111】
【発明の効果】
上述のように、本発明によれば、まず観察物体の微小な平面部分を正確に検出することができる。また、微小な平面部分を検出することにより、磁気ディスクの磁気ヘッド密着防止用微小突起の形状や欠陥の検出を行うことができる。
次に、画像情報を抽出してその絶対値や2乗値を形成することにより、エッジ部分による散乱光等の外乱の影響を受けずにエッジ部の検出を行うことができ、半導体ウエハー上に形成された位置決め用凹凸標本のエッジ部を正確に検出することができる。
そして、偏光成分のリターデーション量が±θである2つの画像から観察物体の位相分布を計測することができるので、観察物体の位相分布を計測する時間を短縮することができる。また、従来の縞走査法と比較すると画像を撮像する素子のダイナミックレンジに影響されることが少なくなり、装置の簡素化も図ることができる。
【図面の簡単な説明】
【図1】本発明による観察物体の物理量を検出するための装置の構成を示す図である。
【図2】(a),(b)は夫々図1に示した装置を用いて第1実施例による方法で取得した偏光成分のリターデーション量がθ,−θのときの観察物体の微分干渉像を示す図である。(c)は(a),(b)に示した画像により形成した差画像を示す図である。(d)は(c)に示した差画像から0値近傍の値を抽出し0値近傍の部分とそれ以外の部分とを2値化したときの画像を示す図である。
【図3】磁気ディスク上に形成されているバンプの断面図である。
【図4】図3に示したバンプの摩耗の度合いを検出するための、図2(d)に示した画像から前記バンプの面頂部分の情報を最少近似した画像を示す図である。
【図5】(a),(b)は夫々図1に示した装置を用いて第2実施例による方法で取得した偏光成分のリターデーション量がθ,−θのときの観察物体の微分干渉像を示す図である。(c)は(a),(b)に示した画像により形成した差画像を示す図である。(d)は(c)に示した差画像の絶対値をとって閾値を設定し、この閾値を基に閾値以上の部分と閾値以下の部分とで2値化した画像を示す図である。
【図6】第2実施例の方法により観察物体のエッジ部を検出し観察物体の位置決めを行う手順を説明するための図である。
【図7】 観察物体の物理量を検出するための装置の構成を示す図である。
【図8】微分干渉顕微鏡の光学的応答特性を示すグラフである。
【図9】 (a),(b)は夫々図7に示した装置を用いて参考例による方法で取得した偏光成分のリターデーション量がθ,−θのときの観察物体の微分干渉像を示す図である。(c),(d)は夫々(a),(b)に示した画像により形成した差画像,和画像を示す図である。(e)は位相分布再現図である。
【図10】従来の縞操作法により検出される位相分布再現図である。
【図11】本発明による観察物体の物理量を検出するための装置の構成を示す図である。
【図12】本発明による観察物体の物理量を検出するための装置の構成を示す図である。
【符号の説明】
1,21 光源
2,22 照明光学系
3,23 結像光学系
4,24 微分干渉顕微鏡
5,25 CCDカメラ
6,26 マイクロコンピュータ
7,9,17,27,29,37 レンズ
8,28 絞り
10,30 偏光子
11,31 1/4波長板
12 ハーフミラー
13,32,35 ノマルスキープリズム
14,34 対物レンズ
15 観察物体
16,36 検光子
18,38 パルスモータ
33 コンデンサーレンズ
Claims (4)
- 光源と、該光源からの光を2つの偏光成分に分離するための部材を備えた前記光源からの光を観察物体に導くための照明光学系と、前記照明光学系内で分離された2つの偏光成分を再構成するための部材を備えた観察物体の像を形成するための結像光学系とを有する微分干渉顕微鏡と、前記2つの偏光成分のリターデーション量を変化させる手段と、観察物体の像を撮像する手段とを備え、前記リターデーション量を変化させる手段によって形成されたリターデーション量が等しく符号の異なる観察物体の2つの微分干渉像を前記撮像手段で撮像する検出装置において、
前記2つの微分干渉像の画像において夫々対応する画素毎に差演算を行って差画像情報を取得し、該差画像情報から所定の範囲の画像情報を抽出することにより観察物体の勾配を検出する演算手段を備えていることを特徴とする検出装置。 - 光源と、該光源からの光を2つの偏光成分に分離するための部材を備えた前記光源からの光を観察物体に導くための照明光学系と、前記照明光学系内で分離された2つの偏光成分を再構成するための部材を備えた観察物体の像を形成するための結像光学系とを有する微分干渉顕微鏡と、前記2つの偏光成分のリターデーション量を変化させる手段と、観察物体の像を撮像する手段とを備え、前記リターデーション量を変化させる手段によって形成されたリターデーション量が等しく符号の異なる観察物体の2つの微分干渉像を前記撮像手段で撮像する検出装置に用いられる方法であって、
該2つの微分干渉像の画像において夫々対応する画素毎に差演算を行って差画像情報を取得し、該差画像情報から所定の範囲の画像情報を抽出することにより観察物体の勾配を検出する方法。 - 光源と、該光源からの光を2つの偏光成分に分離するための部材を備えた前記光源からの光を観察物体に導くための照明光学系と、前記照明光学系内で分離された2つの偏光成分を再構成するための部材を備えた観察物体の像を形成するための結像光学系とを有する微分干渉顕微鏡と、前記2つの偏光成分のリターデーション量を変化させる手段と、観察物体の像を撮像する手段とを備え、前記リターデーション量を変化させる手段によって形成されたリターデーション量が等しく符号の異なる観察物体の2つの微分干渉像を前記撮像手段で撮像する検出装置において、
該2つの微分干渉像の画像において夫々対応する画素毎に差演算を行って差画像情報を取得し、該差画像情報における絶対値を求め所定の閾値を設定し、閾値を越える画像情報を抽出することにより観察物体のエッジ部を検出する手段を備えていることを特徴とする検出装置。 - 光源と、該光源からの光を2つの偏光成分に分離するための部材を備えた前記光源からの光を観察物体に導くための照明光学系と、前記照明光学系内で分離された2つの偏光成分を再構成するための部材を備えた観察物体の像を形成するための結像光学系とを有する微分干渉顕微鏡と、前記2つの偏光成分のリターデーション量を変化させる手段と、観察物体の像を撮像する手段とを備え、前記リターデーション量を変化させる手段によって形成されたリターデーション量が等しく符号の異なる観察物体の2つの微分干渉像を前記撮像手段で撮像する検出装置に用いられる方法であって、
該2つの微分干渉像の画像において夫々対応する画素毎に差演算を行って差画像情報を取得し、該差画像情報における絶対値を求め所定の閾値を設定し、閾値を越える画像情報を抽出することにより観察物体のエッジ部を検出する方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP28610398A JP4270614B2 (ja) | 1998-09-22 | 1998-09-22 | 観察物体の物理量を検出するための装置およびこれを用いた検出方法 |
| US09/400,433 US6369375B1 (en) | 1998-09-22 | 1999-09-21 | Detection apparatus having an object gradient detection |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP28610398A JP4270614B2 (ja) | 1998-09-22 | 1998-09-22 | 観察物体の物理量を検出するための装置およびこれを用いた検出方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008260061A Division JP4436878B2 (ja) | 2008-10-06 | 2008-10-06 | 観察物体の物理量を検出するための装置およびこれを用いた検出方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000098253A JP2000098253A (ja) | 2000-04-07 |
| JP4270614B2 true JP4270614B2 (ja) | 2009-06-03 |
Family
ID=17699982
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP28610398A Expired - Fee Related JP4270614B2 (ja) | 1998-09-22 | 1998-09-22 | 観察物体の物理量を検出するための装置およびこれを用いた検出方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US6369375B1 (ja) |
| JP (1) | JP4270614B2 (ja) |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020195548A1 (en) * | 2001-06-06 | 2002-12-26 | Dowski Edward Raymond | Wavefront coding interference contrast imaging systems |
| US6741356B1 (en) * | 1999-09-20 | 2004-05-25 | Olympus Corporation | Method for detecting physical amount of object and optical apparatus using the same |
| EP1290485B1 (de) * | 2000-06-14 | 2007-01-03 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren zur quantitativen optischen messung der topographie einer oberfläche |
| US6891627B1 (en) | 2000-09-20 | 2005-05-10 | Kla-Tencor Technologies Corp. | Methods and systems for determining a critical dimension and overlay of a specimen |
| US7079245B2 (en) * | 2000-12-14 | 2006-07-18 | Mitsubishi Denki Kabushiki Kaisha | Method and apparatus for detecting gap of liquid-crystal panel and apparatus therefor |
| US7151632B2 (en) * | 2001-01-12 | 2006-12-19 | University Of Rochester | Apparatus for production of an inhomogeneously polarized optical beam for use in illumination and a method thereof |
| IL146924A (en) * | 2001-12-04 | 2007-03-08 | Nova Measuring Instr Ltd | Metal cmp process monitoring |
| US20050027489A1 (en) * | 2002-08-14 | 2005-02-03 | Yale University | Phase extraction between coupled atom interferometers using ellipse-specific fitting |
| JP4689171B2 (ja) * | 2004-02-06 | 2011-05-25 | オリンパス株式会社 | 培養細胞の状態計測方法及び計測装置 |
| JP4582762B2 (ja) * | 2003-12-12 | 2010-11-17 | オリンパス株式会社 | 顕微鏡観察方法及びそれを用いるための顕微鏡 |
| US7239389B2 (en) * | 2004-07-29 | 2007-07-03 | Applied Materials, Israel, Ltd. | Determination of irradiation parameters for inspection of a surface |
| JP4718231B2 (ja) * | 2005-04-20 | 2011-07-06 | オリンパス株式会社 | 形状計測装置、及びプログラム |
| US7583875B2 (en) * | 2005-07-22 | 2009-09-01 | Seiko Epson Corporation | Illumination device, image display device, and projector |
| DE102005062439B3 (de) * | 2005-12-23 | 2007-05-10 | JOMESA Meßsysteme GmbH | Verfahren für die Partikelanalyse und Partikelanalysesystem |
| JP4833662B2 (ja) * | 2005-12-28 | 2011-12-07 | 株式会社ミツトヨ | 非接触変位計測装置、並びにそのエッジ検出方法及びエッジ検出プログラム |
| JP4917404B2 (ja) * | 2006-10-18 | 2012-04-18 | オリンパス株式会社 | 位相物体の可視化方法とその顕微鏡システム |
| JP2008111726A (ja) * | 2006-10-30 | 2008-05-15 | Olympus Corp | 3次元位相計測方法とそれに使われる微分干渉顕微鏡 |
| WO2008105156A1 (ja) * | 2007-02-28 | 2008-09-04 | Photonic Lattice, Inc. | 偏光イメージング装置,及び微分干渉顕微鏡 |
| FR2922314B1 (fr) * | 2007-10-16 | 2010-02-26 | Thales Sa | Dispositif optique de mesure de parametres anemometriques |
| US20110317909A1 (en) * | 2010-06-29 | 2011-12-29 | General Electric Company | Tool wear quantification system and method |
| CZ304906B6 (cs) * | 2011-04-06 | 2015-01-14 | Vysoké Učení Technické V Brně | Způsob topografického zjišťování pevnosti v tlaku cementového kamene v betonových konstrukcích |
| US20140268149A1 (en) * | 2013-03-15 | 2014-09-18 | University Of Rochester | Device and method for detection of polarization features |
| EP3261577B1 (en) * | 2015-02-25 | 2020-05-20 | DENTSPLY SIRONA Inc. | Method of determining wear on a dental scaler tool |
| JP6367775B2 (ja) * | 2015-09-01 | 2018-08-01 | 日本電信電話株式会社 | 摩耗進行度判断装置、摩耗進行度判断方法、及び摩耗進行度判断用プログラム |
| CN106501266B (zh) * | 2016-10-18 | 2018-05-29 | 淮阴师范学院 | 基于微分干涉的光学薄膜缺陷检测方法 |
| CN106705897B (zh) * | 2016-12-23 | 2021-06-08 | 电子科技大学 | 曲面电子显示屏用弧形玻璃面板缺陷检测方法 |
| JP7063337B2 (ja) * | 2017-09-12 | 2022-05-09 | 株式会社ニコン | 顕微鏡および観察方法 |
| US20190339376A1 (en) * | 2018-05-04 | 2019-11-07 | GM Global Technology Operations LLC | Differential phase-based detector |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3047646B2 (ja) | 1991-10-31 | 2000-05-29 | 株式会社日立製作所 | 欠陥検出方法及びその装置 |
| JPH05149719A (ja) | 1991-11-29 | 1993-06-15 | Toshiba Corp | 性状測定装置 |
| JPH05232384A (ja) | 1992-02-18 | 1993-09-10 | Olympus Optical Co Ltd | 干渉顕微鏡 |
| JPH07239212A (ja) | 1994-02-28 | 1995-09-12 | Nikon Corp | 位置検出装置 |
| JP3417640B2 (ja) | 1994-03-10 | 2003-06-16 | 株式会社東芝 | 位相差測定装置及びその方法 |
| JP3943620B2 (ja) | 1995-04-24 | 2007-07-11 | オリンパス株式会社 | 微分干渉顕微鏡 |
| US5969855A (en) | 1995-10-13 | 1999-10-19 | Olympus Optical Co., Ltd. | Microscope apparatus |
| US6134009A (en) * | 1997-11-07 | 2000-10-17 | Lucid, Inc. | Imaging system using polarization effects to enhance image quality |
-
1998
- 1998-09-22 JP JP28610398A patent/JP4270614B2/ja not_active Expired - Fee Related
-
1999
- 1999-09-21 US US09/400,433 patent/US6369375B1/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000098253A (ja) | 2000-04-07 |
| US6369375B1 (en) | 2002-04-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4270614B2 (ja) | 観察物体の物理量を検出するための装置およびこれを用いた検出方法 | |
| US7468799B2 (en) | Scanning interferometry for thin film thickness and surface measurements | |
| KR100917912B1 (ko) | 단일 편광자 초점 타원계측기 | |
| TWI448661B (zh) | 使用極化掃描法之干涉儀 | |
| US7312866B2 (en) | Methods and systems for substrate surface evaluation | |
| US10054423B2 (en) | Optical method and system for critical dimensions and thickness characterization | |
| JPS63193005A (ja) | 面検査用装置 | |
| US11635289B2 (en) | Surface shape measurement device and surface shape measurement method | |
| TWI623725B (zh) | 在一亮場差分干涉對比系統中提供高精確度檢驗或計量之方法 | |
| US6741356B1 (en) | Method for detecting physical amount of object and optical apparatus using the same | |
| JPH10103914A (ja) | 高速欠陥分析用の検査装置 | |
| JP4436878B2 (ja) | 観察物体の物理量を検出するための装置およびこれを用いた検出方法 | |
| WO2013118543A1 (ja) | 表面計測装置 | |
| US7518712B2 (en) | Tilted edge for optical-transfer-function measurement | |
| JP2001159736A (ja) | 観察物体の物理量を検出するための方法およびこれを用いた検出装置 | |
| JP2000002514A (ja) | 膜厚測定装置及びアライメントセンサ並びにアライメント装置 | |
| Ishihara et al. | High-speed 3D shape measurement using a nonscanning multiple-beam confocal imaging system | |
| US20230392919A1 (en) | Calculation method, image-capturing method, and image-capturing apparatus | |
| JPH0613963B2 (ja) | 表面欠陥検査方法 | |
| US20230375816A1 (en) | Calculation method, imaging-capturing method, and image-capturing apparatus | |
| JP2023142687A (ja) | 偏光顕微鏡装置及び視野内補正解析方法 | |
| Baker | Semiconductor wafer inspection | |
| JP2022074621A (ja) | 検査装置及び検査方法 | |
| JP2022069005A (ja) | 測定装置、及び測定方法 | |
| JP2580943B2 (ja) | 単結晶基板の凹凸の測定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050708 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080812 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081006 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090203 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090224 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120306 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120306 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120306 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130306 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140306 Year of fee payment: 5 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |