JP4243546B2 - 空間的光変調器(slm)の可動素子のアドレス指定方法 - Google Patents
空間的光変調器(slm)の可動素子のアドレス指定方法 Download PDFInfo
- Publication number
- JP4243546B2 JP4243546B2 JP2003577037A JP2003577037A JP4243546B2 JP 4243546 B2 JP4243546 B2 JP 4243546B2 JP 2003577037 A JP2003577037 A JP 2003577037A JP 2003577037 A JP2003577037 A JP 2003577037A JP 4243546 B2 JP4243546 B2 JP 4243546B2
- Authority
- JP
- Japan
- Prior art keywords
- force
- deflection
- movable element
- electrode
- electrostatic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims abstract description 30
- 230000005670 electromagnetic radiation Effects 0.000 claims abstract description 15
- 230000004044 response Effects 0.000 claims abstract description 13
- 230000003321 amplification Effects 0.000 claims description 10
- 238000003199 nucleic acid amplification method Methods 0.000 claims description 10
- 230000010355 oscillation Effects 0.000 claims description 4
- 230000003068 static effect Effects 0.000 claims 2
- 230000007423 decrease Effects 0.000 claims 1
- 230000000737 periodic effect Effects 0.000 claims 1
- 238000007493 shaping process Methods 0.000 abstract 1
- 239000000463 material Substances 0.000 description 11
- 239000004020 conductor Substances 0.000 description 7
- 230000001629 suppression Effects 0.000 description 5
- 230000001360 synchronised effect Effects 0.000 description 5
- 230000001133 acceleration Effects 0.000 description 4
- 239000000758 substrate Substances 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000005684 electric field Effects 0.000 description 3
- 239000007789 gas Substances 0.000 description 3
- 230000005855 radiation Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- 238000005452 bending Methods 0.000 description 2
- 238000013016 damping Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000001960 triggered effect Effects 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 239000011261 inert gas Substances 0.000 description 1
- 238000001459 lithography Methods 0.000 description 1
- 238000004377 microelectronic Methods 0.000 description 1
- 229910021421 monocrystalline silicon Inorganic materials 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000000059 patterning Methods 0.000 description 1
- 238000002310 reflectometry Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 239000004332 silver Substances 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- 239000003190 viscoelastic substance Substances 0.000 description 1
- 239000008207 working material Substances 0.000 description 1
Images










Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/0816—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements
- G02B26/0833—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD
- G02B26/0841—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD the reflecting element being moved or deformed by electrostatic means
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Mechanical Light Control Or Optical Switches (AREA)
- Control Of Indicators Other Than Cathode Ray Tubes (AREA)
- Micromachines (AREA)
- Mechanical Optical Scanning Systems (AREA)
- Liquid Crystal (AREA)
Description
以下の詳細な説明は、図を参照して行われる。本発明を説明するために、実施例が説明されるが、それは特許請求の範囲により定められる本発明の範囲を限定するためのものではない。当業者は、以下の説明に関するさまざまな同等の変形を認識する。
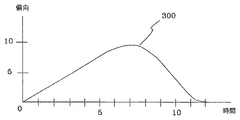
間隙は、また、共振性アドレス指定においても減少させることができる。その理由は、スナップ・イン状態に近づいた時には、可動素子の加速度は方向を変えているからである。

ただし、Veは、電極に印加される電圧、Vmは、可動素子に印加される電圧である。両電極に印加される電圧は、次の通りである。
電極1により誘起される力は、次のようになる。
電極2により誘起される力は、次のようになる。
このとき可動素子に作用する力F1の方向の合力は、次のようになる。
両電極上の電圧の振幅Aが等しいものと仮定すれば、周波数ωを有する成分以外の全ての寄与は、打ち消しあい、移動を誘起する力は、簡単に次のように与えられる。
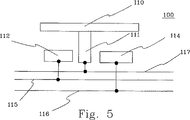
また、図6に示されている実施例と図7に示されている実施例、すなわち、電極112、114の少なくとも1つに接続可能な少なくとも1つの抵抗と少なくとも1つの抵抗160に接続可能な少なくとも1つのさらなる電極154、156とを組合わせることも可能である。
Claims (14)
- 空間的光変調器により電磁放射の少なくとも1つのパルスを変調する方法において、前記方法は、
複数の機械的可動変調器素子を備えるステップと、
少なくとも1つの印加電圧に応答して静電気力を発生することによって機械的可動変調器素子を移動することができる作動素子を備えるステップとを含み、
機械的可動変調器素子は、静電気力に対して共振性機械的応答をして偏向し、
さらに、少なくとも1つの機械的可動変調器素子において、電磁放射パルスが変調素子に入射する時の変調素子の偏向が、静電気力が静的に印加される場合の一瞬の力による偏向より著しく大きくなるように、静電気力に対する前記共振性機械的応答を励起するための印加電圧の時間依存性を適応させるステップを含む前記方法。 - 静電気力は、機械的可動変調器素子を加速し、前記偏向が最大値に達する前に著しく小さくなる請求項1記載の方法。
- 静電気力は、機械的可動変調器素子を加速する力のパルスから成り、前記力のパルスは、前記偏向が最大値に達する前に著しく小さくなる請求項1記載の方法。
- 前記力のパルスは、変調素子の共振周波数の周期の1/4より短い請求項3記載の方法。
- 電磁放射パルスが変調素子に入射する時の偏向は、静的な力によるスナップ・イン・ポイントに対応する偏向より大きい請求項1記載の方法。
- 静電気力は、変調素子の共振周波数近傍の周波数の発振成分を含む請求項1記載の方法。
- 静電気力は、機械的可動変調器素子の共振性発振応答を励起する周波数で周期的である請求項6記載の方法。
- 前記偏向は、共振によって増幅され、静電気力の最大値に対応する静的偏向よりも著しく大きい最大値を有する請求項7記載の方法。
- 静電気力は、印加電圧に応答する可動部分と少なくとも一つの電極との間の静電引力によって発生する請求項1記載の方法。
- 静電気力は、可動部分と一つの電極との間、および可動部分と別の電極との間の静電引力のバランスによって発生する請求項1記載の方法。
- 前記空間的光変調器は、複数の変調素子を有し、変調素子のための静電気力は、可動部分と電極の平均電位との間のアドレス指定電圧によって発生し、前記アドレス指定電圧は、変調素子の少なくともいくつかで異なり、前記二つの電極間の増幅電圧は、前記複数の変調素子で同じである請求項8記載の方法。
- 前記増幅電圧は、変調素子の共振周波数近傍の周波数の交流電圧である請求項9記載の方法。
- 電磁放射は、248nmと同じかそれより短い波長を有する請求項1記載の方法。
- 物体平面に配置された少なくとも1つの空間的光変調器(SLM)を用いることによりパターンを形成する装置において、前記SLMは、複数の可動変調器超小形素子(110)を含み、前記装置は、
少なくとも1つの印加電圧に応答して静電気力を発生することによって機械的可動変調器素子を移動することができる作動素子(112、114)と、
少なくとも1つの機械的可動変調器素子において、電磁放射パルスが変調素子に入射する時の変調素子の偏向が、静電気力が静的に印加される場合の一瞬の力による偏向より著しく大きくなるように、静電気力に対する共振性機械的応答を励起するための印加電圧の時間依存性を適応させる手段とを含む前記装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SE0200787A SE0200787D0 (sv) | 2002-03-15 | 2002-03-15 | Improved addressing method |
| PCT/SE2003/000427 WO2003079090A1 (en) | 2002-03-15 | 2003-03-14 | IMPROVED ADDRESSING METHOD OF MOVABLE ELEMENTS IN A SPATIAL LIGHT MODULATOR (slm) |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005521078A JP2005521078A (ja) | 2005-07-14 |
| JP2005521078A5 JP2005521078A5 (ja) | 2009-01-22 |
| JP4243546B2 true JP4243546B2 (ja) | 2009-03-25 |
Family
ID=20287276
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003577037A Expired - Fee Related JP4243546B2 (ja) | 2002-03-15 | 2003-03-14 | 空間的光変調器(slm)の可動素子のアドレス指定方法 |
Country Status (9)
| Country | Link |
|---|---|
| US (2) | US7075693B2 (ja) |
| EP (1) | EP1485746B1 (ja) |
| JP (1) | JP4243546B2 (ja) |
| CN (1) | CN1324344C (ja) |
| AT (1) | ATE403175T1 (ja) |
| AU (1) | AU2003215999A1 (ja) |
| DE (1) | DE60322517D1 (ja) |
| SE (1) | SE0200787D0 (ja) |
| WO (1) | WO2003079090A1 (ja) |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE0100336L (sv) | 2001-02-05 | 2002-08-06 | Micronic Laser Systems Ab | Adresseringsmetod och apparat som använder densamma tekniskt område |
| US6876440B1 (en) | 2003-09-30 | 2005-04-05 | Asml Holding N.V. | Methods and systems to compensate for a stitching disturbance of a printed pattern in a maskless lithography system utilizing overlap of exposure zones with attenuation of the aerial image in the overlap region |
| US7410736B2 (en) | 2003-09-30 | 2008-08-12 | Asml Holding N.V. | Methods and systems to compensate for a stitching disturbance of a printed pattern in a maskless lithography system not utilizing overlap of the exposure zones |
| US7023526B2 (en) | 2003-09-30 | 2006-04-04 | Asml Holding N.V. | Methods and systems to compensate for a stitching disturbance of a printed pattern in a maskless lithography system utilizing overlap without an explicit attenuation |
| US20090033878A1 (en) * | 2003-11-01 | 2009-02-05 | Akira Shirai | System configurations and methods for controlling image projection apparatuses and mirror device |
| US7336290B2 (en) * | 2004-01-07 | 2008-02-26 | Texas Instruments Incorporated | Method and apparatus for increasing a perceived resolution of a display |
| JP4073886B2 (ja) * | 2004-03-30 | 2008-04-09 | アンリツ株式会社 | 可変波長光源 |
| US7072090B2 (en) * | 2004-04-22 | 2006-07-04 | Micronic Laser Systems Ab | Addressing of an SLM |
| US7499146B2 (en) * | 2005-03-14 | 2009-03-03 | Asml Netherlands B.V. | Lithographic apparatus and device manufacturing method, an integrated circuit, a flat panel display, and a method of compensating for cupping |
| US7372617B2 (en) * | 2005-07-06 | 2008-05-13 | Peter Enoksson | Hidden hinge MEMS device |
| JP2007033787A (ja) * | 2005-07-26 | 2007-02-08 | Fujifilm Corp | 微小薄膜可動素子および微小薄膜可動素子アレイ並びに微小薄膜可動素子アレイの駆動方法 |
| US7505195B2 (en) | 2006-05-04 | 2009-03-17 | Miradia Inc. | Reflective spatial light modulator with high stiffness torsion spring hinge |
| US7443568B2 (en) * | 2006-05-04 | 2008-10-28 | Miradia Inc. | Method and system for resonant operation of a reflective spatial light modulator |
| US7649673B2 (en) * | 2007-02-26 | 2010-01-19 | Silicon Quest Kabushiki-Kaisha | Micromirror device with a single address electrode |
| US20080231936A1 (en) * | 2007-03-02 | 2008-09-25 | Taro Endo | Display system comprising a mirror device with micromirrors controlled to operate in intermediate oscillating state |
| US20090179837A1 (en) * | 2007-03-02 | 2009-07-16 | Taro Endo | Display system comprising a mirror device with micromirrors controlled to operate in intermediate oscillating state |
| US9250536B2 (en) | 2007-03-30 | 2016-02-02 | Asml Netherlands B.V. | Lithographic apparatus and method |
| US8937706B2 (en) * | 2007-03-30 | 2015-01-20 | Asml Netherlands B.V. | Lithographic apparatus and method |
| JP5239594B2 (ja) * | 2008-07-30 | 2013-07-17 | 富士通株式会社 | クリップ検出装置及び方法 |
| US8531755B2 (en) | 2009-02-16 | 2013-09-10 | Micronic Laser Systems Ab | SLM device and method combining multiple mirrors for high-power delivery |
| NL2006625A (en) * | 2010-05-26 | 2011-11-29 | Asml Netherlands Bv | Illumination system and lithographic apparatus. |
| DE102011081042B4 (de) * | 2011-08-16 | 2021-05-27 | Robert Bosch Gmbh | Steuervorrichtung für einen Mikrospiegel, Verfahren zum Ansteuern eines Mikrospiegels und Bildprojektionssystem |
| CN102354050B (zh) * | 2011-09-28 | 2013-01-02 | 哈尔滨工业大学 | 柔性辅助臂跟随超高角灵敏度高频响微角摆控制反射镜 |
| US20130286463A1 (en) * | 2011-10-24 | 2013-10-31 | Texas Instruments Incorporated | Dynamic actuation waveform for a digital micromirror device |
| FR2985320B1 (fr) * | 2011-12-29 | 2014-02-14 | Alpao | Systeme a etalonnage commun et procede correspondant |
| DE102015205404A1 (de) * | 2015-03-25 | 2016-09-29 | Carl Zeiss Smt Gmbh | Vielspiegel-Anordnung |
| CN109557661B (zh) * | 2018-10-15 | 2021-02-26 | 武汉光迅科技股份有限公司 | 驱动光学转镜转动的方法及用于驱动光学转镜转动的装置 |
| CN111552072B (zh) * | 2020-04-28 | 2022-07-12 | 安徽中科米微电子技术有限公司 | 大尺寸mems垂直梳齿微镜及其制备方法 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5032924A (en) * | 1989-04-10 | 1991-07-16 | Nilford Laboratories, Inc. | System for producing an image from a sequence of pixels |
| US5285196A (en) * | 1992-10-15 | 1994-02-08 | Texas Instruments Incorporated | Bistable DMD addressing method |
| US5526172A (en) * | 1993-07-27 | 1996-06-11 | Texas Instruments Incorporated | Microminiature, monolithic, variable electrical signal processor and apparatus including same |
| US6044705A (en) * | 1993-10-18 | 2000-04-04 | Xros, Inc. | Micromachined members coupled for relative rotation by torsion bars |
| US5488862A (en) * | 1993-10-18 | 1996-02-06 | Armand P. Neukermans | Monolithic silicon rate-gyro with integrated sensors |
| US5949570A (en) * | 1995-06-20 | 1999-09-07 | Matsushita Electric Industrial Co., Ltd. | Diffractive optical modulator and method for producing the same, infrared sensor including such a diffractive optical modulator and method for producing the same, and display device including such a diffractive optical modulator |
| US5771116A (en) * | 1996-10-21 | 1998-06-23 | Texas Instruments Incorporated | Multiple bias level reset waveform for enhanced DMD control |
| US6323982B1 (en) * | 1998-05-22 | 2001-11-27 | Texas Instruments Incorporated | Yield superstructure for digital micromirror device |
| KR100311032B1 (ko) * | 1999-10-29 | 2001-11-02 | 윤종용 | 마이크로미러 가동장치 |
| JP2001228552A (ja) * | 2000-02-17 | 2001-08-24 | Fuji Photo Film Co Ltd | プリンタ |
| US6600591B2 (en) * | 2001-06-12 | 2003-07-29 | Network Photonics, Inc. | Micromirror array having adjustable mirror angles |
| US7190509B2 (en) * | 2001-11-07 | 2007-03-13 | Trex Enterprises Corp. | Optically addressed MEMS |
| US6757092B2 (en) * | 2001-12-10 | 2004-06-29 | Nayef M. Abu-Ageel | Micro-machine electrostatic actuator, method and system employing same, and fabrication methods thereof |
| WO2004041710A1 (ja) * | 2002-11-06 | 2004-05-21 | Matsushita Electric Industrial Co., Ltd. | 変位検出機能を備えたマイクロアクチュエータ、および当該マイクロアクチュエータを備えた可変形ミラー |
| US6956683B2 (en) * | 2003-06-11 | 2005-10-18 | Texas Instruments Incorporated | Pivoting platform having a piezoelectric drive |
| US20070132681A1 (en) * | 2005-12-09 | 2007-06-14 | Chih-Liang Chen | Passive micro-mirror-array spatial light modulation |
-
2002
- 2002-03-15 SE SE0200787A patent/SE0200787D0/xx unknown
-
2003
- 2003-03-14 AT AT03744576T patent/ATE403175T1/de not_active IP Right Cessation
- 2003-03-14 EP EP03744576A patent/EP1485746B1/en not_active Expired - Lifetime
- 2003-03-14 CN CNB038061686A patent/CN1324344C/zh not_active Expired - Fee Related
- 2003-03-14 AU AU2003215999A patent/AU2003215999A1/en not_active Abandoned
- 2003-03-14 DE DE60322517T patent/DE60322517D1/de not_active Expired - Lifetime
- 2003-03-14 WO PCT/SE2003/000427 patent/WO2003079090A1/en active Application Filing
- 2003-03-14 JP JP2003577037A patent/JP4243546B2/ja not_active Expired - Fee Related
- 2003-03-14 US US10/507,554 patent/US7075693B2/en not_active Expired - Fee Related
-
2006
- 2006-04-14 US US11/404,340 patent/US20060187517A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| CN1324344C (zh) | 2007-07-04 |
| US20060187517A1 (en) | 2006-08-24 |
| AU2003215999A1 (en) | 2003-09-29 |
| ATE403175T1 (de) | 2008-08-15 |
| JP2005521078A (ja) | 2005-07-14 |
| DE60322517D1 (de) | 2008-09-11 |
| EP1485746B1 (en) | 2008-07-30 |
| CN1643432A (zh) | 2005-07-20 |
| US7075693B2 (en) | 2006-07-11 |
| EP1485746A1 (en) | 2004-12-15 |
| US20050122558A1 (en) | 2005-06-09 |
| SE0200787D0 (sv) | 2002-03-15 |
| WO2003079090A1 (en) | 2003-09-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4243546B2 (ja) | 空間的光変調器(slm)の可動素子のアドレス指定方法 | |
| JP2005521078A5 (ja) | ||
| KR101284542B1 (ko) | 반발 모드 작동식 주사 미세 거울 | |
| Schenk et al. | Large deflection micromechanical scanning mirrors for linear scans and pattern generation | |
| CN107797274B (zh) | 用于光的二维偏转的微机械装置和方法 | |
| TWI605013B (zh) | 微光學機電掃描裝置與製造其之方法 | |
| US20070269199A1 (en) | Driving device, optical scanning device, and object information detecting device | |
| US10746982B2 (en) | Electrostatically actuated oscillating structure with oscillation starting phase control, and manufacturing and driving method thereof | |
| JP6789438B2 (ja) | 光走査装置およびその制御方法 | |
| JP2008020701A (ja) | 2次元光スキャナ、それを用いた光学装置および2次元光スキャナの製造方法 | |
| JP3759598B2 (ja) | アクチュエータ | |
| EP1527484A2 (en) | High resolution piezoelectric motor | |
| JP2011064928A (ja) | 2次元光スキャナ | |
| JP7436686B2 (ja) | マイクロミラーデバイス及び光走査装置 | |
| JP5049904B2 (ja) | 可動構造体及びそれを用いた光走査ミラー | |
| JP2008083122A (ja) | 可動構造体及びそれを備えた光学素子 | |
| JP2007192902A (ja) | 微小電気機械素子の駆動方法及び微小電気機械素子アレイの駆動方法、微小電気機械素子及び微小電気機械素子アレイ、並びに画像形成装置 | |
| JP6881532B2 (ja) | Mems周波数チューニングばね | |
| US20220127136A1 (en) | Mems actuator and mems actuator array with a plurality of mems actuators | |
| JP2008122961A (ja) | 低電圧マイクロメカニカルデバイス | |
| Bifano et al. | Micromachined deformable mirror for optical wavefront compensation | |
| JP7455976B2 (ja) | 光走査装置、及びマイクロミラーデバイスの駆動方法 | |
| JP2005250077A (ja) | 光偏向器 | |
| WO2003079091A1 (en) | An adressing method of moveable microelements in a spatial light modulator (slm) for pattering of a workpiece | |
| Joudrey et al. | Design, modeling, fabrication and testing of a high aspect ratio electrostatic torsional MEMS micromirror |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051116 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081110 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20081216 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090105 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120109 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120109 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130109 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130109 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |