JP4213541B2 - 変位測定器 - Google Patents
変位測定器 Download PDFInfo
- Publication number
- JP4213541B2 JP4213541B2 JP2003296040A JP2003296040A JP4213541B2 JP 4213541 B2 JP4213541 B2 JP 4213541B2 JP 2003296040 A JP2003296040 A JP 2003296040A JP 2003296040 A JP2003296040 A JP 2003296040A JP 4213541 B2 JP4213541 B2 JP 4213541B2
- Authority
- JP
- Japan
- Prior art keywords
- displacement measuring
- signal
- sensor
- calculation
- effective value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
Description
{2(a2+b2+c2)/3}1/2 …(1)
に、各信号の信号レベルa、b、cを代入して演算する処理をコンピュータで行なっている。
{(データbit数−1)×2(bitシフト回数・加算回数)}
×3(2乗計算回数) …(2)
となるため、2乗計算が多い場合には、命令数が増加し、演算に時間がかかることになり、結果として消費電力が大きくなるという問題が存在した。
{3(c−b)2+(2a−b−c)2}1/2/3 …(3)
に基づいて計算する演算機能を備えたことにより、前記課題を解決したものである。
[4{(a2+b2+c2)−(ab+bc+ca)}/9]1/2 …(4)
となる。
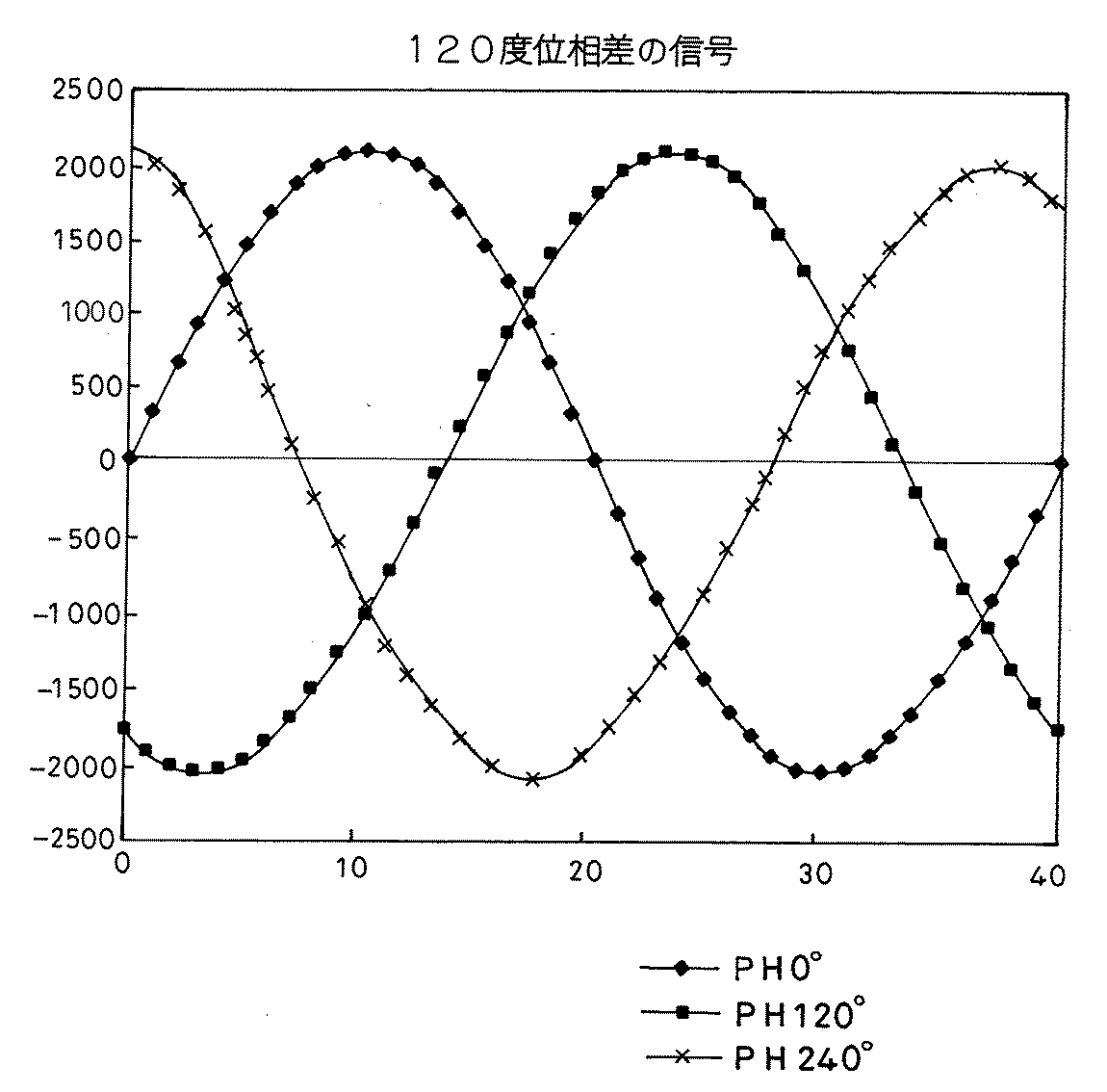
a=sinθ
b=sin(θ−120°)=sinθcos120°−cosθsin120°
=−(sinθ+√3cosθ)/2
c=sin(θ−240°)=sinθcos240°−cosθsin240°
=−(sinθ−√3cosθ)/2
で表すことができる。
a2=sin2θ
b2=(sin2θ+3cos2θ+2√3sinθcosθ)/4
c2=(sin2θ+3cos2θ−2√3sinθcosθ)/4
ab=−(sin2θ+√3cosθsinθ)
bc= (sin2θ+3cos2θ)/4)
ca=−(sin2θ−√3cosθsinθ)
となる。
4{6(sin2θ+cos2θ)/4+3(sin2θ+cos2θ)/4}/9=1
となる。
2{6(sin2θ+cos2θ)/4}/3=1
となる。
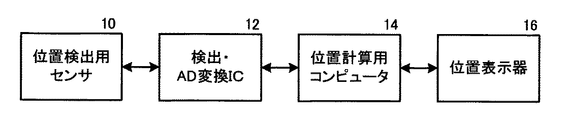
12…AD変換器
14…コンピュータ
16…位置表示器
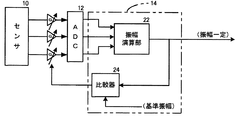
20…可変増幅器
22…振幅演算部
24…比較器
Claims (3)
- センサから出力される120°位相差の3相信号に基づいて変位を測定する変位測定器において、
信号レベルがそれぞれa、b、cの3相信号の実効値を、次式
{3(c−b)2+(2a−b−c)2}1/2/3
に基づいて計算する演算機能を備えたことを特徴とする変位測定器。 - 前記実効値に基づいて、アナログ系のゲイン設定を行なうことを特徴とする請求項1に記載の変位測定器。
- 前記実効値に基づいて、センサの欠陥検出を行なうことを特徴とする請求項1に記載の変位測定器。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003296040A JP4213541B2 (ja) | 2003-08-20 | 2003-08-20 | 変位測定器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003296040A JP4213541B2 (ja) | 2003-08-20 | 2003-08-20 | 変位測定器 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005062123A JP2005062123A (ja) | 2005-03-10 |
| JP4213541B2 true JP4213541B2 (ja) | 2009-01-21 |
Family
ID=34372076
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003296040A Expired - Fee Related JP4213541B2 (ja) | 2003-08-20 | 2003-08-20 | 変位測定器 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4213541B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022148472A (ja) | 2021-03-24 | 2022-10-06 | 株式会社ミツトヨ | フロントエンド回路及びエンコーダ |
| JP2022148473A (ja) | 2021-03-24 | 2022-10-06 | 株式会社ミツトヨ | フロントエンド回路及びエンコーダ |
-
2003
- 2003-08-20 JP JP2003296040A patent/JP4213541B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005062123A (ja) | 2005-03-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3225157B2 (ja) | 位置検出装置及び方法 | |
| JP4664837B2 (ja) | 電圧等の実効値演算回路および測定器 | |
| CN1869615A (zh) | 电子信号的温度补偿装置 | |
| JPS6238062A (ja) | 2値信号検出方法及び装置 | |
| JPS6343005B2 (ja) | ||
| JP5176208B2 (ja) | 回転角度検出方法および回転角度センサ | |
| JP4213541B2 (ja) | 変位測定器 | |
| JP3208933B2 (ja) | 位置測定装置 | |
| US7460979B2 (en) | Method and system for enhanced resolution, automatically-calibrated position sensor | |
| JPH0496130A (ja) | 位置信号の校正装置 | |
| JPS62218813A (ja) | 圧力検出装置 | |
| US5477471A (en) | Method of compensating for power supply variation in a sensor output | |
| EP3705902B1 (en) | Method of determining an absolute angle of a magnetic field | |
| RU2533305C1 (ru) | Цифровой преобразователь угла | |
| JP2006300637A (ja) | ひずみ及び温度の測定装置 | |
| KR102514249B1 (ko) | 정전기 센서 및 그 센서의 측정방법 | |
| JPS60148228A (ja) | アナログ・デイジタル変換装置 | |
| Dolgikh et al. | Correction of Systematic Errors of Ratiometric Measurement Transducers | |
| JPH01212921A (ja) | A/d変換回路 | |
| JPS58172502A (ja) | 渦流式距離測定方法 | |
| JP3452556B2 (ja) | エンコーダ信号処理装置及び方法 | |
| JPS58198709A (ja) | 位置検出装置 | |
| US20190227128A1 (en) | Measuring apparatus, method, and storage medium | |
| SU661407A1 (ru) | Преобразователь составл ющих комплексной величины в электрические сигналы | |
| CN117589221A (zh) | 编码器校准方法、装置、上位机和存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060710 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20081020 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20081028 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20081030 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111107 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4213541 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141107 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |