JP4189191B2 - クラッチ制御装置 - Google Patents
クラッチ制御装置 Download PDFInfo
- Publication number
- JP4189191B2 JP4189191B2 JP2002282252A JP2002282252A JP4189191B2 JP 4189191 B2 JP4189191 B2 JP 4189191B2 JP 2002282252 A JP2002282252 A JP 2002282252A JP 2002282252 A JP2002282252 A JP 2002282252A JP 4189191 B2 JP4189191 B2 JP 4189191B2
- Authority
- JP
- Japan
- Prior art keywords
- pressure plate
- diaphragm spring
- adjustment
- clutch
- distance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Landscapes
- Mechanical Operated Clutches (AREA)
Description
【発明の属する技術分野】
本発明は、クラッチディスクの摩耗補償を行うクラッチ制御装置に関するものである。
【0002】
【従来の技術】
従来、既存のマニュアルトランスミッションにアクチュエータを取り付け、運転者の意志若しくは車両状態により一連の変速操作(クラッチの断接、ギヤシフト、セレクト)を自動的に行うシステムが知られている。
【0003】
こうしたシステムが備える摩擦クラッチは、クラッチフェーシング(クラッチディスク)の摩耗に伴ってダイヤフラムスプリングの姿勢が変化するため、同クラッチを非係合状態にするために必要な操作力、すなわちクラッチのレリーズ荷重が増加する。このため、クラッチディスクの摩耗を補償する機構部(調整機構)を備えたものも提案されている(例えば、特許文献1参照。)。
【0004】
【特許文献1】
特開平5−215149号公報
【0005】
【発明が解決しようとする課題】
ところで、こうしたシステムにおいては、クラッチディスクの摩耗補償は搭載される機構部の諸元に応じた所定の限度内で実施可能であり、限界を超えた状態では同摩耗補償は機能し得ない。こうした摩耗補償不能の状態が所要の整備をされることなく放置されると、車両挙動が不安定化する一因となりうる。従って、クラッチディスクの摩耗補償が限界を超え、若しくは限界に近づいたことが速やかに利用者に報知されることが好ましい。
【0006】
本発明の目的は、調整機構によるプレッシャプレート及びダイヤフラムスプリングの軸方向の総変更距離を検出することができるクラッチ制御装置を提供することにある。
【0007】
【課題を解決するための手段】
上記問題点を解決するために、請求項1に記載の発明は、駆動源の出力軸と一体的に回転するフライホイールに対向するクラッチディスクをプレッシャプレート及びダイヤフラムスプリングを介して軸方向に変位させるアクチュエータを備え、該アクチュエータを駆動制御して該クラッチディスクと該フライホイールとの係合状態を変化させるクラッチ制御装置において、前記プレッシャプレート及び前記ダイヤフラムスプリングの間に配設され、前記アクチュエータの駆動により該プレッシャプレート及び該ダイヤフラムスプリングの軸方向の距離を所定距離の限度内で変更し、前記クラッチディスクの摩耗補償を行う調整機構と、前記調整機構による前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の総変更距離を検出する検出手段とを備え、前記調整機構は、前記プレッシャプレートに設けられて該プレッシャプレートから前記ダイヤフラムスプリングに向かうテーパ面を有するテーパ部と、前記ダイヤフラムスプリングに設けられて前記テーパ面と当接するウェッジ側テーパ面を有するアジャストウェッジ部材とを備え、前記テーパ部及び前記アジャストウェッジ部材を所定角度で相対回転させて前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の距離を所定変動量ずつ変更するよう構成し、前記検出手段は、前記テーパ部及び前記アジャストウェッジ部材を所定角度で相対回転させて前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の距離を所定変動量ずつ変更する要否を判定する判定手段を備え、前記判定手段により前記テーパ部及び前記アジャストウェッジ部材を所定角度で相対回転させて前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の距離を所定変動量ずつ変更する必要性が判定されるときの連続回数に基づき前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の総変更距離を検出するよう構成したことを要旨とする。
【0008】
請求項2に記載の発明は、駆動源の出力軸と一体的に回転するフライホイールに対向するクラッチディスクをプレッシャプレート及びダイヤフラムスプリングを介して軸方向に変位させるアクチュエータを備え、該アクチュエータを駆動制御して該クラッチディスクと該フライホイールとの係合状態を変化させるクラッチ制御装置において、前記プレッシャプレート及び前記ダイヤフラムスプリングの間に配設され、前記アクチュエータの駆動により該プレッシャプレート及び該ダイヤフラムスプリングの軸方向の距離を所定距離の限度内で変更し、前記クラッチディスクの摩耗補償を行う調整機構と、前記調整機構による前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の総変更距離を検出する検出手段とを備え、前記調整機構は、前記プレッシャプレートに設けられて該プレッシャプレートから前記ダイヤフラムスプリングに向かうテーパ面を有するテーパ部と、前記ダイヤフラムスプリングに設けられて前記テーパ面と当接するウェッジ側テーパ面を有するアジャストウェッジ部材とを備え、前記テーパ部及び前記アジャストウェッジ部材を所定角度で相対回転させて前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の距離を所定変動量ずつ変更するよう構成し、前記検出手段は、前記テーパ部及び前記アジャストウェッジ部材を所定角度で相対回転させて前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の距離を所定変動量ずつ変更する要否を判定する判定手段を備え、前記判定手段により前記テーパ部及び前記アジャストウェッジ部材を所定角度で相対回転させて前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の距離を所定変動量ずつ変更する必要性が判定された累積回数に基づき前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の総変更距離を検出するよう構成したことを要旨とする。
【0011】
請求項3に記載の発明は、請求項1又は2に記載のクラッチ制御装置において、前記検出手段により検出された前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の総変更距離が前記所定距離に達したときに報知する報知手段を備えたことを要旨とする。
【0012】
(作用)
各請求項に記載の発明によれば、調整機構によるプレッシャプレート及び前記ダイヤフラムスプリングの軸方向の総変更距離が検出される。従って、例えば検出された総変更距離に応じて利用者に報知することで、同総変更距離が上記所定距離に達した状態が長時間にわたって放置されることが回避される。
【0013】
請求項1に記載の発明によれば、判定手段により前記テーパ部及び前記アジャストウェッジ部材を所定角度で相対回転させて前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の距離を所定変動量ずつ変更する必要性が判定されるときの連続回数に基づき極めて簡易にプレッシャプレート及びダイヤフラムスプリングの軸方向の総変更距離が検出される。
【0014】
請求項2に記載の発明によれば、判定手段により前記テーパ部及び前記アジャストウェッジ部材を所定角度で相対回転させて前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の距離を所定変動量ずつ変更する必要性が判定された累積回数に基づき極めて簡易にプレッシャプレート及びダイヤフラムスプリングの軸方向の総変更距離が検出される。
【0015】
請求項3に記載の発明によれば、検出手段により検出された前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の総変更距離が前記所定距離に達したときに報知されることで、利用者はクラッチディスクの交換などの速やかな対処行動が可能となる。
【0016】
【発明の実施の形態】
(第1実施形態)
以下、本発明を具体化した第1実施形態を図1〜図9に従って説明する。図1に概略的に示された本クラッチ制御装置は、駆動源としてのエンジン10と変速機11との間に配設される摩擦クラッチ20の係合・非係合を制御するものであり、同クラッチ20を操作するアクチュエータ30と、このアクチュエータ30を駆動制御するクラッチ制御回路40とを含んで構成されている。
【0017】
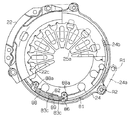
図2に詳細を示したように、摩擦クラッチ20は、フライホイール21、クラッチカバー22、クラッチディスク23、プレッシャプレート24、ダイヤフラムスプリング25、レリーズベアリング26、レリーズフォーク27、変速機ケース11aに固定されたピボット支持部材28及び調整機構80を主たる構成要素として備えている。尚、プレッシャプレート24及びダイヤフラムスプリング25等はクラッチカバー22に一体的に組み付けられるため、これらをクラッチカバー組立体(アッセンブリ)と称することがある。
【0018】
フライホイール21は、鋳鉄製の円板であり、エンジン10のクランクシャフト(駆動源の出力軸)10aにボルト固定されていて、同クランクシャフト10aと一体的に回転するようになっている。
【0019】
クラッチカバー22は、略円筒形状であって、円筒部22aと、円筒部22aの内周側に形成されたフランジ部22bと、円筒部22aの内周縁に周方向に等間隔で形成された複数の支点形成部22cとを含んでいる。そして、クラッチカバー22は円筒部22aの外周部にてフライホイール21にボルト固定されて同フライホイール21と一体的に回転するようになっている。
【0020】
クラッチディスク23は、エンジン10の動力を変速機11に伝達する摩擦板であって、フライホイール21とプレッシャプレート24との間に配設され、中央部にて変速機11の入力軸とスプライン連結されることにより軸方向に移動できるようになっている。また、クラッチディスク23の外周部の両面には、摩擦材からなるクラッチフェーシング23a,23bがリベットにより張り付け固定されている。
【0021】
プレッシャプレート24は、クラッチディスク23をフライホイール21側に押圧してフライホイール21との間に挟み込み、クラッチディスク23をフライホイール21と摩擦係合させて一体的に回転させるものである。このプレッシャプレート24は、クラッチカバー22の回転に伴って回転するように、ストラップ24aにより同クラッチカバー22と連結されている。
【0022】
ストラップ24aは、積層された複数枚の薄い板ばね材から構成されていて、図3にも示したように、その一端がリベットR1によりクラッチカバー22の外周部に固定されるとともに、その他端がリベットR2によりプレッシャプレート24の外周部に設けられた突起部に固定されている。これにより、ストラップ24aは、プレッシャプレート24がフライホイール21から離間し得るように、同プレッシャプレート24に対して軸方向の付勢力を付与している。
【0023】
図3にも示したように、ダイヤフラムスプリング25は、クラッチカバー22の円筒部22aの内周に沿って放射状に配置された複数(12本)の弾発性の板材(以下、「レバー部材25a」と称する。)から構成されている。図2に示したように、各レバー部材25aは、クラッチカバー22の支点形成部22cに、各レバー部材25aの軸方向両側に配置された一対のリング状の支点部材25b,25cを介して挟持されている。これにより、レバー部材25aは、クラッチカバー22に対し支点部材25b,25cを支点としたピボット運動をすることができるようになっている。
【0024】
レリーズベアリング26は、変速機11の入力軸の外周を包囲するように変速機ケース11aに支持された支持スリーブ11bに対し摺動可能に支持されている。そして、レリーズベアリング26は、レバー部材25aの内端部(ダイヤフラムスプリング25の中央部)をフライホイール21側に押動するための力点部26aを構成している。
【0025】
レリーズフォーク27は、アクチュエータ30の作動に応じてレリーズベアリング26を軸方向に摺動させるためのものである。このレリーズフォーク27は、一端がレリーズベアリング26と当接し、他端がアクチュエータ30のロッド31の先端部と当接部27aにて当接している。また、レリーズフォーク27は、変速機ケース11aに固定されたスプリング27cによりピボット支持部材28に組みつけられていて、同レリーズフォーク27の略中央部27bにて同ピボット支持部材28を支点として揺動するようになっている。
【0026】
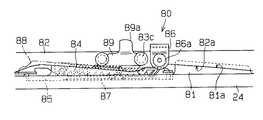
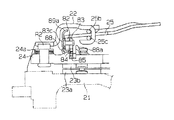
調整機構80は、プレッシャプレート24とダイヤフラムスプリング25との間の力の伝達経路を形成するとともにダイヤフラムスプリング25とプレッシャプレート24との軸方向の距離を所定距離の限度内で変更し得るようになっている。以下、図3〜図7に基づき調整機構80について説明する。尚、図4は図3の調整機構80に係わる構成を側方から見た図である。図5は摩擦クラッチ20が係合状態のときの調整機構80の断面図であり、図6は摩擦クラッチ20が係合状態のときのダイヤフラムスプリング25の保持に係わる断面図である。また、図7は図3の調整機構80に係わる構成を側方から見た図であり、図7(a)〜図7(d)はそれぞれダイヤフラムスプリング25の姿勢変化に応じた調整機構80の作動を示している。
【0027】
図3及び図4に示したように、プレッシャプレート24の外周端部にはリング状のテーパ部81が形成されていて、テーパ部81が有する鋸歯状の複数のテーパ面81aがダイヤフラムスプリング25に向けて立設されている。
【0028】
また、上記プレッシャプレート24(テーパ部81)のテーパ面81aと上記ダイヤフラムスプリング25の外周端部との間には、アジャストウェッジ部材82が配設されている。このアジャストウェッジ部材82は、テーパ部81と略同一径のリング状の部材であって、テーパ面81aと同一形状のウェッジ側テーパ面82aを有している。そして、ウェッジ側テーパ面82aとテーパ面81aとは、互いに当接している。アジャストウェッジ部材82のダイヤフラムスプリング25側端面は平坦とされている。このアジャストウェッジ部材82は、プレッシャプレート24とダイヤフラムスプリング25との間の力の伝達経路を形成し、ダイヤフラムスプリング25に付与される力及び同ダイヤフラムスプリング25に発生する力をプレッシャプレート24に伝達する。
【0029】
一方、図5及び図7に示したように、アジャストウェッジ部材82の内周面には、リベット83cにてアジャストピニオン83が固定されている。このアジャストピニオン83には、ダイヤフラムスプリング25からプレッシャプレート24への軸方向に向けて起立するピニオン歯83aが形成されている。ピニオン歯83aは、鋸歯形状(又は等間隔に配置される三角形状)を呈している。
【0030】
図4及び図7に示すように、プレッシャプレート24のアジャストピニオン83と対向する端面には、ロアラック85が取り付けられている。ロアラック85は、プレッシャプレート24の端面からダイヤフラムスプリング25側へ向かう軸方向に立設するロアラック歯85aを備えている。また、ロアラック85のロアラック歯85aの両端部にはロアラック歯85aの立設方向に沿って突出する突出部85bが設けられている。図3に示すように、このロアラック85のプレッシャプレート24への取付けにあたっては、ロアラック85よりも周方向に長く形成された固定板材88をテーパ部81の外周面に沿って組付ける。そして、テーパ部81の内周側に延出する固定板材88の両端部をロアラック85の両端部を跨くようにしてネジ88aにてプレッシャプレート24に固定する。これにより、ロアラック85はプレッシャプレート24に対して固定される。
【0031】
アジャストピニオン83とロアラック85との軸方向間には、アジャストピニオン83及びロアラック85に対して周方向及び軸方向に移動可能なアッパラック84が配設されている。アッパラック84は、プレッシャプレート24からダイヤフラムスプリング25に向かう軸方向に立設するとともにピニオン歯83aと噛合可能な第1ラック歯84aと、ダイヤフラムスプリング25からプレッシャプレート24に向かう軸方向に立設するとともにロアラック歯85aと噛合可能な第2ラック歯84bとを有している。そして、アッパラック84の長手方向の両端部には、ロアラック85の突出部85bと係止可能な規制部84cが設けられている。この規制部84cが突出部85bの端部に引っ掛かることで、ロアラック歯85aと第2ラック歯84bとの噛合が完全に解除される前にロアラック85に対する軸方向及び周方向の移動量が規制されるように構成されている。尚、規制部84cにて規制されるアッパラック84のロアラック85に対する周方向の移動量は、第1ラック歯84aの歯面の半ピッチ〜1ピッチの範囲内となるように予め設定されている。
【0032】
ロアラック85の外周面側の一方の突出部85b1近傍には、アッパラック84とロアラック85との噛合を解除するための付勢部材87の一端が係止されている。付勢部材87は、一端が係上された状態でロアラック85の外周面に沿ってロアラック85の他方の突出部85b2側に延在し、切り欠き85cを介してロアラック85の内周面側に延出している。更に、ロアラック85の内周面では他方の突出部85b2側から一方の突出部85b1側へと延出するとともに、ロアラック歯85aの歯面と第2ラック歯84bの歯面とが摺接しながら噛合を解除する方向(図7において矢印C方向)にアッパラック84を付勢するバネ部87aが形成されている。尚、付勢部材87の一端から切り欠き85cまで延在する部分は、バネ部87aによりアッパラック84を付勢する力を受ける受部87bである。この付勢部材87によって、ロアラック歯85aの歯面と第2ラック歯84bの歯面とが摺接しながらアッパラック84とロアラック85との噛合を解除する方向にアッパラック84が付勢される。
【0033】
図6に示すように、プレッシャプレート24の外周側のダイヤフラムスプリング25側の端面には、前記テーパ部81と略同心円上においてプレッシャプレート24からダイヤフラムスプリング25へ向かう軸方向にストッパ部24bが立設している。このストッパ部24bとクラッチカバーの対向する内壁面との間には、摩擦クラッチ20の係合状態において所定の隙間が形成されており、ダイヤフラムスプリング25の姿勢に応じてこの隙間の範囲内でプレッシャプレート24が軸方向に移動可能である。ダイヤフラムスプリング25の姿勢が変化してストッパ部24bがクラッチカバー22の対向する内壁面に当接すると、プレッシャプレート24はクラッチカバー22に近づくこれ以上の軸方向への移動ができなくなる。
【0034】
また、アジャストウェッジ部材82の外周面側にはリベット86aにて保持部材86が固定されている。保持部材86は、アジャストウェッジ部材82のダイヤフラムスプリング25側の端面よりもダイヤフラムスプリング25側に延出するとともに、アジャストウェッジ部材82の外周面側から内周面側に向かって屈曲している。そして、保持部材86は、アジャストウェッジ部材82の端面との間でダイヤフラムスプリング25の外周端部を保持している。保持部材86によって、ダイヤフラムスプリング25の外周端部の軸方向の移動に追従してアジャストウェッジ部材82が軸方向に移動する。
【0035】
図4に示すように、アジャストピニオン83が固定されている箇所に対向するアジャストウェッジ部材82の外周面には、噛合解除部材89が取り付けられている。噛合解除部材89は、一端がアジャストウェッジ部材82の周面に対して回転可能に取付けられ、他端がプレッシャプレート24のダイヤフラムスプリング25側の端面と当接可能に形成されている。また、一端と他端との間にはプレッシャプレート24からダイヤフラムスプリング25に向かう軸方向に立設されて、摩擦クラッチ20の係合状態においてクラッチカバー22の対向する内壁面と所定の距離をもって突出する突部89aが形成されている。尚、噛合解除部材89の一端は、アジャストピニオン83を固定するリベット83cの1つによってアジャストウェッジ部材82に取り付けられている。また、摩擦クラッチ20の係合状態において突部89aとクラッチカバー22の対向する内壁面とのなす距離は、ストッパ部24bがクラッチカバー22の対向する内壁面と当接すると同時に突部89aがクラッチカバー22の対向する内壁面と当接するように設定されている。
【0036】
アクチュエータ30は、前述したロッド31を進退移動させるものであって、これによりダイヤフラムスプリング25及びプレッシャプレート24を介してフライホイール21に対向するクラッチディスク23を進退させる。すなわち、アクチュエータ30は、クラッチディスク23の係合状態を変化させるための力をダイヤフラムスプリング25に付与する。このアクチュエータ30は、直流駆動の電動モータ32と、この電動モータ32を支持するとともに車両の適宜個所に固定されたハウジング33とを備えている。ハウジング33内には、電動モータ32により回転駆動される回転軸34と、側面視にて扇型をなしハウジング33に揺動可能に支持されたセクタギヤ35と、アシストスプリング36とが収容されている。
【0037】
前記回転軸34にはウォームが形成され、前記セクタギヤ35の円弧部と歯合している。また、ロッド31の基端部(レリーズフォーク27と当接している先端部と反対側の端部)は、セクタギヤ35に回動可能に支持されている。これらにより、電動モータ32が回転するとセクタギヤ35が回転し、ロッド31がハウジング33に対して進退移動するようになっている。
【0038】
前記アシストスプリング36は、セクタギヤ35の揺動範囲内において圧縮されている。アシストスプリング36の一端はハウジング33の後端部に係止され、他端はセクタギヤ35に係止されている。これにより、アシストスプリング36は、セクタギヤ35が図2において時計回転方向に所定角度以上回動すると、同セクタギヤ35を時計回転方向に付勢し、これにより、ロッド31を右方向へ付勢して電動モータ32によるロッド31の右方向への移動を補助している。
【0039】
再び図1を参照すると、クラッチ制御回路40はアクチュエータ30の作動を制御するもので、CPU(マイクロコンピュータ)41、インターフェース42〜44、電源回路45及び駆動回路46等から構成されている。CPU41は、後述するプログラム及びマップ等を記憶したROM、RAM及びEEPROM等を内蔵している。
【0040】
インターフェース42は、バスを介してCPU41に接続されるとともに、変速機のシフトレバーが操作されたときに生じる荷重(シフトレバー荷重)を検出するシフトレバー荷重センサ51、車速Vを検出する車速センサ52、実際の変速段を検出するギヤ位置センサ53、変速機11の入力軸11cの回転数を検出する変速機入力軸回転数センサ54、及びアクチュエータ30に固定されセクタギヤ35の揺動角度を検知してロッド31のストローク(以下、「クラッチストロークST」という)を検出するストロークセンサ37と接続されていて、CPU41に対し各センサの検出信号を供給するようになっている。また、インターフェース42は、報知手段としてのインジケータランプ57にも接続されている。このインジケータランプ57は、例えば車室内のインストルメントパネルに設けられており、CPU41により点灯駆動されることで利用者によるシステムの作動確認に供される。具体的には、クラッチフェーシング23a,23bが限界まで摩耗して、調整機構80によるアジャスト動作が機能し得なくなったと判断されたとき、CPU41はインジケータランプ57を点灯駆動する。
【0041】
インターフェース43は、バスを介してCPU41に接続されるとともに、エンジン制御装置60と双方向の通信が可能となるように接続されている。これにより、クラッチ制御回路40のCPU41は、エンジン制御装置60が入力しているスロットル開度センサ55及びエンジン回転数センサ56の情報を取得し得るようになっている。
【0042】
インターフェース44は、バスを介してCPU41に接続されるとともに、電源回路45のOR回路45aの一方の入力端子と駆動回路46とに接続されていて、CPU41からの指令に基づきこれらに所定の信号を送出するようになっている。
【0043】
電源回路45は、前記OR回路45aと、同OR回路45aの出力端子がベースに接続されたパワートランジスタTrと、定電圧回路45bとを備えている。パワートランジスタTrのコレクタは車両に搭載されたバッテリ70のプラス端子と接続され、エミッタは定電圧回路45bと駆動回路46とに接続されていて、パワートランジスタTrがオン状態とされたとき、それぞれに電源を供給するようになっている。定電圧回路45bは、バッテリ電圧を所定の一定電圧(5V)に変換するもので、CPU41、及びインターフェース42〜44に接続されていて、各々に電源を供給するようになっている。OR回路45aの他方の入力端子には、運転者によりオン状態及びオフ状態に操作されるイグニッションスイッチ71の一端が接続されている。このイグニッションスイッチ71の他端は、バッテリ70のプラス端子に接続されている。また、イグニッションスイッチ71の前記一端はインターフェース42にも接続されていて、CPU41はイグニッションスイッチ71の状態を検出し得るようになっている。
【0044】
駆動回路46は、インターフェース44を介した指令信号によりオン又はオフする4個のスイッチング素子(図示省略)を内蔵している。これらのスイッチング素子は、周知のブリッジ回路を構成し、選択的に導通状態とされるとともに導通時間が制御され、電動モータ32に所定方向及び同所定方向とは逆方向の任意の大きさの電流を流すようになっている。即ち、電動モータ32は、CPU41からの指令信号により駆動回路46を介して所要の電流が供給され、駆動制御される。
【0045】
エンジン制御装置60は、図示しないマイクロコンピュータを主として構成され、エンジン10の燃料噴射量及び点火時期等を制御するものである。前述したようにエンジン制御装置60は、エンジン10のスロットル開度TAを検出するスロットル開度センサ55と、同エンジン10の回転数NEを検出するエンジン回転数センサ56等と接続され、それぞれのセンサからの信号を入力・処理するようになっている。
【0046】
上記のように構成されたクラッチ制御装置においては、従来の運転者によるクラッチペダル操作に代わり、アクチュエータ30がクラッチ断接操作を自動的に行う。即ち、断接操作は、CPU41が、例えば(1)車両が走行している状態から停止する状態に移行していることを検出した場合(変速機入力軸回転数が所定値以下に低下した場合)、(2)シフトレバー荷重センサ51の検出する荷重が所定値以上となったことを検出した場合(運転者の変速意思が確認された場合)、(3)車両が停止している状態において、アクセルペダルが踏込まれたことを検出した場合、等において実行される。
【0047】
このクラッチ制御装置において、摩擦クラッチ20を接(係合)状態とし、エンジン10の動力を変速機11に伝達する場合の作動について説明すると、先ず、CPU41からの指令信号により駆動回路46が電動モータ32に所定の電流を流し、電動モータ32を回転駆動する。これにより、セクタギヤ35が図2において反時計回転方向に回転し、ロッド31が左方向に移動する。
【0048】
一方、レリーズベアリング26は、ダイヤフラムスプリング25により、フライホイール21から離間する方向(図2における右方向)に力を受けている。この力は、レリーズベアリング26を介してレリーズフォーク27に伝達されるため、レリーズフォーク27は、ピボット支持部材28を支点として図2において反時計回転方向に回動する力を受けている。従って、ロッド31が図2において左方向に移動すると、レリーズフォーク27は反時計回転方向に回動するとともにダイヤフラムスプリング25の中央部はフライホイール21から離間する方向に移動する。
【0049】
このとき、ダイヤフラムスプリング25は支点部材25b,25cを中心に揺動(姿勢変化)し、同ダイヤフラムスプリング25の外周端部と当接するアジャストウェッジ部材82をフライホイール21側に押動する。この結果、プレッシャプレート24はテーパ部81を介してフライホイール21側に向かう力を受け、クラッチディスク23を同フライホイール21との間で挟み込む。これと同時に、プレッシャプレート24はアジャストピニオン83、アッパラック84、及びロアラック85を介してフライホイール21側に向かう力を受ける。従って、ピニオン歯83a及び第1ラック歯84a、第2ラック歯84b及びロアラック歯85aの各噛合状態が維持される。そして、アジャストピニオン83とロアラック85との相対回転が許容されることがないので、アジャストウェッジ部材82はプレッシャプレート24(テーパ部81)に対し相対回転しない。これにより、クラッチディスク23は、フライホイール21と摩擦係合して同フライホイール21と一体的に回転するようになり、変速機11にエンジン10の動力を伝達する。尚、この状態では、プレッシャプレート24とダイヤフラムスプリング25の外周端部とは一定の軸方向の距離に保持される。
【0050】
次に、クラッチを断(非係合)状態とし、エンジン10の動力を変速機11に伝達しない状態とする場合について説明すると、先ず、電動モータ32を回転駆動してセクタギヤ35を図2において時計回転方向に回転させる。これにより、ロッド31が図2において右方向に移動し、レリーズフォーク27に対し当接部27aにて右方向の力を与えるため、同レリーズフォーク27はピボット支持部材28を支点として図2において時計回転方向に回動し、レリーズベアリング26をフライホイール21側に押動する。
【0051】
このため、ダイヤフラムスプリング25は力点部26aにてフライホイール21に向う力を受け、支点部材25b,25cを中心に揺動(姿勢変化)する。そして、ダイヤフラムスプリング25の外周端部はフライホイール21から離間する方向に移動し、アジャストウェッジ部材82を介してプレッシャプレート24をフライホイール21側に押圧していた力は減少する。一方、プレッシャプレート24は、ストラップ24aによりクラッチカバー22と接続されていて、フライホイール21から離間する方向に常に付勢されているため、この付勢力によりクラッチディスク23から僅かに離れる。この結果、クラッチディスク23はフリー状態となって、エンジン10の動力が変速機11に伝達されない状態となる。
【0052】
尚、通常の運転時においてクラッチを断状態とする場合は、プレッシャプレート24のストッパ部24bとクラッチカバー22とが当接しない範囲内(噛合解除部材89の突部89aとクラッチカバー22とが当接しない範囲内)でアクチュエータ30のクラッチストロークSTを制御する。これによると、プレッシャプレート24とダイヤフラムスプリング25の外周端部との軸方向の距離は変更されない。このため、図7(a)に概念的に示したように、アジャストピニオン83のピニオン歯83aとアッパラック84の第1ラック歯84aとの噛合状態及びロアラック85のロアラック歯85aとアッパラック84の第2ラック歯84bとの噛合状態が維持される。そして、アジャストウェッジ部材82はプレッシャプレート24(テーパ部81)に対し相対回転しない。換言すれば、アジャストピニオン83のピニオン歯83a及びアッパラック84の第1ラック歯84aの噛合と、ロアラック85のロアラック歯85a及びアッパラック84の第2ラック歯84bの噛合とがともに解除されない程度にクラッチストロークSTを決定しておく。これにより、アジャストウェッジ部材82はプレッシャプレート24に対し相対回転しない。
【0053】
次に、このクラッチ制御装置において、クラッチフェーシング23a,23bが摩耗した際にこれを補償する場合の作動(アジャスト動作)について説明する。尚、このアジャスト動作は、後述のアジャスト判定においてその必要性が判定された場合に行われる。このアジャスト動作は、少なくともエンジン回転数NEが低回転域にあるときに実行される。
【0054】
通常の運転時におけるクラッチの断状態から更に電動モータ32を回転駆動してセクタギヤ35を図2において時計回転方向に回転させる。これにより、ロッド31が図2において右方向に更に移動し、レリーズフォーク27に対し当接部27aにて右方向の力を与えるため、同レリーズフォーク27はピボット支持部材28を支点として図2において時計回転方向に更に回動し、レリーズベアリング26をフライホイール21側に押動する。これにより、ダイヤフラムスプリング25は力点部26aにてその中央部がフライホイール21に向う力を受け、支点部材25b,25cを中心に更に揺動(姿勢変化)する。そして、ダイヤフラムスプリング25の外周端部はフライホイール21から更に離間する方向に移動し、プレッシャプレート24のストッパ部24bとクラッチカバー22の対向する内壁面とが当接する。これと同時に、噛合解除部材89の突部89aとクラッチカバー22の対向する内壁面とが当接する。ストッパ部24bと噛合解除部材89の突部89aとがクラッチカバー22の内壁面と当接するまでの範囲内では、プレッシャプレート24がストラップ24aの付勢力を受けている。このため、ダイヤフラムスプリング25の外周端部とともに軸方向に移動するアジャストウェッジ部材82とともにテーパ部81も当該軸方向に移動する。従って、アジャストピニオン83とロアラック85とは軸方向に相対移動することなく、アジャストピニオン83のピニオン歯83aとアッパラック84の第1ラック歯84aとの噛合状態及びロアラック85のロアラック歯85aとアッパラック84の第2ラック歯84bとの噛合状態が維持される。そして、アジャストウェッジ部材82はプレッシャプレート24(テーパ部81)に対し相対回転しない。
【0055】
この状態から更に電動モータ32を回転駆動すると、上記に準じてダイヤフラムスプリング25の姿勢は更に変化する。このとき、プレッシャプレート24のストッパ部24bはクラッチカバー22の内壁面に当接しているため、プレッシャプレート24は、それ以上の軸方向への移動が規制される。しかしながら、ダイヤフラムスプリング25の姿勢の変化が継続することで、ダイヤフラムスプリング25は、その外周端部がフライホイール21から離間するように姿勢が変化する。その結果、保持部材86がダイヤフラムスプリング25の外周端部が移動する力を直接受けることで、保持部材86に固定されているアジャストウェッジ部材82がダイヤフラムスプリング25の外周端部に追従して軸方向へ移動する。これにより、アジャストウェッジ部材82は、テーパ部81から離間する。そして、アジャストウェッジ部材82に固定されるアジャストピニオン83がプレッシャプレート24に固定されるロアラック85に対して軸方向へと相対移動する。ここで、アッパラック84は付勢部材87により図面C方向に付勢されているが、アジャストピニオン83は軸方向に移動するために、ピニオン歯83aと第1ラック歯84aとの噛合が完全に解除されない限りアッパラック84は周方向へは移動できない。従って、ピニオン歯83aと第1ラック歯84aとの噛合が完全に解除されないクラッチストロークSTの範囲内では、アジャストピニオン83がロアラック85に対して軸方向に離間するが、アッパラック84は第2ラック歯84bとロアラック歯85aとの噛合が維持されるためにアッパラック84は軸方向に移動しない。図7(b)は、図7(a)の状態からアジャストウェッジ部材82がプレッシャプレート24に対して軸方向に相対移動し、ピニオン歯83aと第1ラック歯84aとの噛合が完全に解除される直前の状態を示している。
【0056】
この状態から更にダイヤフラムスプリング25の姿勢が変化してアジャストウェッジ部材82がプレッシャプレート24から更に離間すると、アジャストピニオン83のピニオン歯83aとアッパラック84の第1ラック歯84aとの噛合が完全に解除される。即ち、図7(b)の状態から、ピニオン歯83aと第1ラック歯84aとの噛合を完全に解除するのに必要な軸方向移動量まで更にクラッチストロークSTが増大すると、ピニオン歯83aと第1ラック歯84aとの噛合が完全に解除される。このとき、アッパラック84の周方向への移動が許容される。これにより、アッパラック84は、付勢部材87にて付勢されて第2ラック歯84bとロアラック歯85aとが摺接しながら軸方向及び周方向へと移動する。これと同時にダイヤフラムスプリング25の姿勢が更に変化することで、ピニオン歯83aと第1ラック歯84aとが離間するが、アッパラック84のロアラック85に対する軸方向移動量は規制部84cにより所定の距離に規制されている。このため、アッパラック84のロアラック85に対する軸方向の相対移動量が所定の距離に達すると、アッパラック84はロアラック85に対するこれ以上の軸方向への相対移動ができなくなる。このときの状態を図7(c)に示す。ここで、前述したように規制部84cにより規制されるアッパラック84の周方向への移動量は、第1ラック歯84aの歯面の半ピッチから1ピッチの範囲内に設定されている。従って、図7(c)の状態では、図7(a)及び図7(b)の状態と比べてピニオン歯83aに対する第1ラック歯84aの位置が、半ピッチから1ピッチの範囲内でずれることになる。尚、図7(c)の状態では、アジャストウェッジ部材82のプレッシャプレート24(テーパ部81)に対する相対回転は行なわれていない。
【0057】
ここで、図7(a)から図7(b)、図7(c)への移行時における噛合解除部材89の作用について説明する。噛合解除部材89の突部89aがクラッチカバー22に当接してからも更にアジャストウェッジ部材82がプレッシャプレート24から離間する方向へと移動すると、クラッチカバー22によって突部89aが規制される。このため、噛合解除部材89は一端側(図4右側)のリベット83cを中心として反時計回転方向に回転する。これによって、噛合解除部材89の他端がプレッシャプレート24のダイヤフラムスプリング25側の端面を図4の下方に押付けるので、アジャストウェッジ部材82はプレッシャプレート24(テーパ部81)から確実に離間される。これによって、例えばテーパ面81aとウェッジ側テーパ面82aとの間に錆付き等がある場合であっても、アジャストウェッジ部材82とテーパ部81とを確実に相対移動させることができる。
【0058】
次に、この状態(図7(c)の状態)から電動モータ32を逆方向に回転駆動してセクタギヤ35を図2において反時計回転方向に回転させる。これにより、ロッド31が図2において左方向に移動してクラッチストロークSTが減少し、ダイヤフラムスプリング25の姿勢が変化する。そして、ダイヤフラムスプリング25の外周端部はフライホイール21に近づく方向に移動する。このとき、アジャストピニオン83のピニオン歯83aとアッパラック84の第1ラック歯84aとの噛合が開始される。ここで、図7(c)の状態では図7(b)の状態に対してアッパラック84が周方向に半ピッチだけ移動しているので、図7(c)の状態においてピニオン歯83aと対向する第1ラック歯84aの歯面は、図7(a)においてピニオン歯83aと噛合する第1ラック歯84aに対して1ピッチずれることになる。従って、図7(c)の状態からクラッチストロークSTが減少したときにピニオン歯83aと噛合する第1ラック歯84aは、図7(a)の状態に対して1ピッチだけ図7の右方向にずれる。このとき、ダイヤフラムスプリング25の押付力によってアジャストウェッジ部材82がプレッシャプレート24に向かって押付けられ、ピニオン歯83aと第1ラック歯84a、及びロアラック歯85aと第2ラック歯84bとがともに噛合しようとする。しかしながら、ピニオン歯83aと第1ラック歯84aとが噛合する歯面が1ピッチだけずれるため、ピニオン歯83aと第1ラック歯84aとの歯面が摺接しながら噛合するとともに、第2ラック歯84bとロアラック歯85aとの歯面が摺接しながら噛合する。これらの歯面の摺接時に、アジャストピニオン83に対してアッパラック84に回転力が付与されるとともにアッパラック84に対してロアラック85に回転力が付与される。この回転力によってアジャストウェッジ部材82がプレッシャプレート24(テーパ部81)に対して相対回転し、図7(d)の状態となる。これにより、テーパ面81aとウェッジ側テーパ面82aとの当接位置が第1ラック歯84aの1ピッチ分だけ変化して、ダイヤフラムスプリング25の外周端部とプレッシャプレート24との軸方向距離が変更される。以上により、通常運転時におけるダイヤフラムスプリング25の姿勢が修正される。また、このとき、噛合解除部材89の突部89aはクラッチカバー22に規制されなくなるため、噛合解除部材89の他端を介してプレッシャプレート24を押圧する力がなくなり、噛合解除部材89は初期の位置へと戻される。
【0059】
以上により、1度のアジャスト動作で第1ラック歯84aの1ピッチ分に応じた量(1ピッチの距離に応じたテーパ面81aの高さ分)だけ摩耗補償がなされる。
【0060】
尚、本実施形態では、第1ラック歯84aの歯数は23個に設定されており、アジャストウェッジ部材82はプレッシャプレート24に対しアジャストピニオン83(ピニオン歯83a)との噛合状態に応じて1ピッチごと19段階で相対回転しうるようになっている。換言すると、19回を限度(摩耗補償限度回数)としてアジャスト動作による上記摩耗補償が実施可能となっている。
【0061】
次に、クラッチフェーシング23a,23bの摩耗補償動作(アジャスト動作)態様について図8のフローチャートに基づき説明する。このルーチンは、前記イグニッションスイッチ71がオンからオフに切り替わる都度に実行される。
【0062】
処理がこのルーチンに移行すると、ステップ101においてCPU41は、アジャスト動作の要否を判定するアジャスト判定を行う。具体的には、初期状態において摩擦クラッチ20を完全係合状態にしたときの電動モータ32の電流である初期クラッチ電流ST0と、このルーチンにおいて摩擦クラッチ20を完全係合状態にしたときの電動モータ32の電流であるクラッチ電流ST1とを比較する。尚、初期状態とは、工場からの出荷時やクラッチディスク23の交換直後等であってクラッチフェーシング23a,23bの摩耗が進行していない状態、或いはクラッチディスク23の摩耗補償動作がなされた直後等の状態をいう。また、完全係合状態は、クラッチディスク23がフライホイール21に略完全に係合される状態であって、アクチュエータ30のロッド31がレリーズフォーク27(当接部27a)を介して加える荷重が略皆無となる状態に相当する。従って、完全係合状態は、例えばアクチュエータ30(電動モータ32)の駆動後の十分な経過時間や検出されるクラッチストローク(ST)の安定状態などによって判断される。そして、この初期状態において摩擦クラッチ20を完全係合状態としたときの最初のクラッチストロークSTが初期クラッチ電流ST0として登録・保存される。或いは、上記初期状態において摩擦クラッチ20を完全係合状態としたときの最初の所定回数(例えば、10回)分のクラッチストロークSTの平均値を初期クラッチ電流ST0として登録・保存してもよい。こうした初期クラッチ電流ST0は、EEPROMに設定・登録される。同様に、初期クラッチ電流ST0と比較されるクラッチ電流ST1(完全係合状態としたときのクラッチストローク)も、当該ルーチンでのクラッチ電流ST1を含む過去所定回数(例えば、10回)分のクラッチストロークの平均値としてもよい。
【0063】
ここで、上記初期状態に対しクラッチフェーシング23a,23bの摩耗が進行していなければ、上記初期クラッチ電流ST0とクラッチ電流ST1との偏差は小さくなる。反対に、上記初期状態に対しクラッチフェーシング23a,23bの摩耗が進行していれば、上記初期クラッチ電流ST0とクラッチ電流ST1との偏差は大きくなる。従って、CPU41は、上記初期クラッチ電流ST0及びクラッチ電流ST1の偏差Δ1と所定のアジャスト判定閾値TH1とを大小比較することでアジャスト判定を行う。或いは、上記初期クラッチ電流ST0とクラッチ電流ST1との偏差Δ1の絶対値と所定のアジャスト判定閾値TH1とを大小比較してもよい。尚、このアジャスト判定閾値TH1は、アジャスト動作に伴いテーパ面81aとウェッジ側テーパ面82aとの当接位置が第1ラック歯84aの1ピッチ分だけ変化するときのテーパ部81に対するアジャストウェッジ部材82(ダイヤフラムスプリング25)の軸方向の移動量に基づき設定されている。
【0064】
ステップ101において、アジャスト動作が必要と判断されると、CPU41はステップ102に移行してアジャスト動作を実行する。このアジャスト動作は、各種実行条件を満足させた状態で行われる。
【0065】
各種実行条件としては、例えば摩擦クラッチ20が係合状態でないことがある。これは、摩擦クラッチ20の係合状態において、アジャスト動作を実行できないからである。
【0066】
また、エンジン回転数NEが所定の下限値及び上限値の範囲にあることがある。これは、エンジン10が停止した駐車状態において所定の変速ギヤが係合されるいわゆるギヤ駐車時に、摩擦クラッチ20を非係合状態にするアジャスト動作を実行することは好ましくないためである。また、エンジン10の振動が小さく、摩擦クラッチ20が共振等しない状態でアジャスト動作を行い、誤調整を防止するためである。
【0067】
さらに、車速Vが「0」であることがある。これは、車両の走行に伴う振動による誤調整を防止するためである。
こうした実行条件を満足するとCPU41は、アクチュエータ30を駆動制御してアジャスト動作を実行する。具体的には、CPU41はアジャスト動作のための必要量に対応して設定されている目標クラッチストロークにクラッチストロークSTが一致するように制御する。これにより、ダイヤフラムスプリング25が姿勢変形して、既述の態様(図7(a)〜図7(d))でアジャスト動作を行う。尚、アジャスト動作のための必要量は、クラッチフェーシング23a,23bの摩耗量X、初期状態において摩擦クラッチ20が係合状態とされたときのプレッシャプレート24のストッパ部24bとクラッチカバー22の対向する内壁面との軸方向距離(噛合解除部材89の突部89aとクラッチカバー22の対向する内壁面との軸方向距離)Y及びアジャストピニオン83のピニオン歯83aとアッパラック84の第1ラック歯84aとの噛合が完全に解除されるまでにアジャストウェッジ部材82がプレッシャプレート24に対して相対的に移動する軸方向の距離(アジャストピニオン83がロアラック85に対して相対的に移動する軸方向の距離)Zを加算した量である。クラッチフェーシング23a,23bの摩耗量Xは、初期クラッチ電流ST0とクラッチ電流ST1との偏差に対応する。
【0068】
上記アジャスト動作で第1ラック歯84aの1ピッチ分に応じた量(1ピッチの距離に応じたテーパ面81aの高さ分)だけ摩耗補償を行うと、CPU41はステップ103に移行してアジャスト判定カウンタCNTを値「1」だけインクリメントする。
【0069】
一方、ステップ101においてアジャスト動作が不要と判断されると、CPU41はステップ104に移行してアジャスト判定カウンタCNTを値「0」にリセットする。
【0070】
従って、アジャスト判定カウンタCNTは、連続してアジャスト動作が必要と判断され実行されるときの演算回数に相当する。
ステップ103又は104のいずれかにおいてアジャスト判定カウンタCNTの更新等を行ったCPU41は、ステップ105に移行して上記アジャスト判定カウンタCNTをEEPROMに設定・登録する。そして、CPU41はその後の処理を一旦終了する。
【0071】
次に、クラッチフェーシング23a,23bの摩耗補償限界時の処理態様について図9のフローチャートに基づき説明する。このルーチンは、前記イグニッションスイッチ71がオフからオンに切り替わる都度に実行される。
【0072】
処理がこのルーチンに移行すると、ステップ201においてCPU41は、アジャスト判定カウンタCNTが所定値K以上か否か、即ちアジャスト動作が必要と判断され実行される演算がK回以上連続したか否かを判断する。この所定値Kは、「2」以上の所定の整数であって通常の運転時においてアジャスト動作が必要と判断され実行される演算が連続し得ない回数に基づき設定されている。
【0073】
ここで、アジャスト判定カウンタCNTが所定値K以上と判断されると、CPU41はアジャスト動作が必要と判断され実行されたにも関わらず、実質的にアジャスト動作(クラッチフェーシング23a,23bの摩耗補償)が機能していないものと判断する。このような状態は、例えばクラッチディスク23の新品の状態からアジャスト動作による上記摩耗補償が限界回数(19回)だけ行われ、これ以上の摩耗補償が実施し得ないときに生じる。
【0074】
このとき、CPU41はステップ202に移行して前記インジケータランプ57を点灯駆動する。そして、CPU41はその後の処理を一旦終了する。従って、クラッチフェーシング23a,23bが限界まで摩耗してクラッチディスク23の交換を要することが利用者に報知される。
【0075】
一方、ステップ201においてアジャスト判定カウンタCNTが所定値K未満と判断されると、CPU41はアジャスト動作(クラッチフェーシング23a,23bの摩耗補償)が正常に機能していると判断する。これは、アジャスト動作が必要と判断され実行されると、次回のルーチンでのアジャスト動作の要否判定(ステップ101)において不要と判断され、アジャスト判定カウンタCNTは「0」にリセットされることによる。このとき、CPU41はそのままその後の処理を一旦終了する。
【0076】
以上詳述したように、本実施形態によれば、以下に示す効果が得られるようになる。
(1)本実施形態では、調整機構80によるプレッシャプレート24及びダイヤフラムスプリング25の軸方向の総変更距離が摩耗補償可能な距離に達し、クラッチディスク23(クラッチフェーシング23a,23b)の摩耗補償が限界状態にあることが検出される。そして、検出されたクラッチディスク23の摩耗補償の限界状態がインジケータランプ57の点灯によって利用者に報知される。従って、利用者は整備所でのクラッチディスク23の交換などの速やかな対処行動が可能となる。そして、クラッチディスク23の摩耗によって車両挙動が不安定化することを回避できる。また、クラッチディスク23の摩耗補償の限界状態が長時間にわたって放置されることを回避できる。
【0077】
(2)本実施形態では、クラッチディスク23の摩耗補償が必要と判定され実施されるときの連続回数(アジャスト判定カウンタCNT)に基づき極めて簡易にクラッチディスク23の摩耗補償の限界状態を検出できる。
【0078】
(第2実施形態)
以下、本発明を具体化した第2実施形態を図10及び図11に従って説明する。尚、説明の便宜上、前記第1実施形態と同様の構成については同一の符号を付してその説明を一部省略する。
【0079】
まず、本実施形態でのクラッチフェーシング23a,23bの摩耗補償動作(アジャスト動作)態様について図10のフローチャートに基づき説明する。このルーチンは、前記イグニッションスイッチ71がオンからオフに切り替わる都度に実行される。
【0080】
処理がこのルーチンに移行すると、ステップ401においてCPU41は、第1実施形態と同様のアジャスト判定(ステップ101)を行う。
ステップ401においてアジャスト動作が必要と判断されると、CPU41はステップ402に移行して第1実施形態と同様のアジャスト動作(ステップ102)を実行する。
【0081】
次いで、CPU41はステップ403に移行してアジャスト回数カウンタNCNTを値「1」だけインクリメントし、ステップ404に移行する。そして、CPU41は、ステップ404において上記アジャスト回数カウンタNCNTをEEPROMに設定・登録し、その後の処理を一旦終了する。
【0082】
一方、ステップ401においてアジャスト動作が不要と判断されると、CPU41はそのままその後の処理を一旦終了する。
従って、アジャスト回数カウンタNCNTは、出荷後若しくは交換後においてクラッチディスク23に対しアジャスト動作が必要と判断され実行された累積回数に相当する。
【0083】
次に、クラッチフェーシング23a,23bの摩耗補償限界時の処理態様について図11のフローチャートに基づき説明する。このルーチンは、前記イグニッションスイッチ71がオフからオンに切り替わる都度に実行される。
【0084】
処理がこのルーチンに移行すると、ステップ501においてCPU41は、アジャスト回数カウンタNCNTが所定値N以上か否か、即ちアジャスト動作が必要と判断され実行された回数がN回以上か否かを判断する。この所定値Nは、例えば出荷後若しくは交換後においてクラッチディスク23に対しアジャスト動作を行いうる摩耗補償の限界回数(19回)に対応して「19」に設定されている。
【0085】
ここで、アジャスト回数カウンタNCNTが所定値N以上と判断されると、CPU41はクラッチディスク23に対しアジャスト動作を行いうる摩耗補償の限界回数に達したと判断する。
【0086】
このとき、CPU41はステップ502に移行して前記インジケータランプ57を点灯駆動する。そして、CPU41はその後の処理を一旦終了する。従って、クラッチフェーシング23a,23bが限界まで摩耗してクラッチディスク23の交換を要することが利用者に報知される。
【0087】
一方、ステップ501においてアジャスト回数カウンタNCNTが所定値N未満と判断されると、CPU41はクラッチディスク23に対しアジャスト動作を行いうる摩耗補償の限界回数に達していないと判断する。このとき、CPU41はそのままその後の処理を一旦終了する。
【0088】
以上詳述したように、本実施形態によれば、前記第1実施形態における(1)の効果に加えて以下に示す効果が得られるようになる。
(1)本実施形態では、クラッチディスク23の摩耗補償が必要と判定され実施された累積回数(アジャスト回数カウンタNCNT)と、調整機構80に規定された所定の摩耗補償限度回数(所定値N)とを比較することで極めて簡易にクラッチディスク23の摩耗補償の限界状態を検出できる。
【0089】
尚、本発明の実施の形態は上記実施形態に限定されるものではなく、次のように変更してもよい。
・前記第2実施形態において、アジャスト回数カウンタNCNTと比較される所定値Nは、摩耗補償限度回数(19回)に対応して「19」に設定する必要はなく、例えば若干の余裕をもって限界状態が検出されるように「19」よりも小さくてもよい。あるいは、所定値Nは、「19」よりも大きくてもよい。
【0090】
・前記各実施形態においては、クラッチディスク23の摩耗補償の限界状態が検出されたときにインジケータランプ57を点灯駆動するようにした。これに対し、クラッチディスク23の摩耗補償の限界状態が検出されたときにスピーカなどを駆動して報知音を発声させてもよい。
【0091】
・前記各実施形態において、アジャスト判定及びアジャスト動作を別ルーチンで行ってもよい。
・前記各実施形態においては、クラッチ制御回路40はアクチュエータ30と一体或いは別体のどちらであってもよい。
【0092】
・前記各実施形態において、電動モータ32を使用したアクチュエータ30に代えて、電磁バルブ等を使用して油圧を制御し、この油圧によりロッド31を進退させる油圧式のアクチュエータを採用してもよい。
【0093】
・前記各実施形態において採用された構成及び制御態様は一例であって、本発明を逸脱しない範囲で適宜の変更を加えてもよい。
【0094】
【発明の効果】
以上詳述したように、各請求項に記載の発明では、調整機構によるプレッシャプレート及びダイヤフラムスプリングの軸方向の総変更距離を検出することができる。
【図面の簡単な説明】
【図1】本発明によるクラッチ制御装置の概略を示す全体図。
【図2】図1に示したクラッチの断面図。
【図3】図1に示したクラッチの一部切り欠いた正面図。
【図4】調整機構に係わる構成を図3の側方から見た図。
【図5】クラッチが係合状態のときの調整機構の断面図。
【図6】クラッチが係合状態のときのダイアフラムスプリングの保持に係わる断面図。
【図7】アジャスト動作時におけるクラッチの調整機構の作動を説明するための図。
【図8】図1に示したCPUが実行するプログラムを示したフローチャート。
【図9】図1に示したCPUが実行するプログラムを示したフローチャート。
【図10】図1に示したCPUが実行するプログラムを示したフローチャート。
【図11】図1に示したCPUが実行するプログラムを示したフローチャート。
【符号の説明】
10…駆動源としてのエンジン、10a…出力軸としてのクランクシャフト、20…摩擦クラッチ、21…フライホイール、23…クラッチディスク、24…プレッシャプレート、25…ダイヤフラムスプリング、30…アクチュエータ、40…検出手段、判定手段を構成するクラッチ制御回路、57…報知手段としてのインジケータランプ、80…調整機構、81…テーパ部、81a…テーパ面、82…アジャストウェッジ部材、82a…ウェッジ側テーパ面。
Claims (3)
- 駆動源の出力軸と一体的に回転するフライホイールに対向するクラッチディスクをプレッシャプレート及びダイヤフラムスプリングを介して軸方向に変位させるアクチュエータを備え、該アクチュエータを駆動制御して該クラッチディスクと該フライホイールとの係合状態を変化させるクラッチ制御装置において、
前記プレッシャプレート及び前記ダイヤフラムスプリングの間に配設され、前記アクチュエータの駆動により該プレッシャプレート及び該ダイヤフラムスプリングの軸方向の距離を所定距離の限度内で変更し、前記クラッチディスクの摩耗補償を行う調整機構と、
前記調整機構による前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の総変更距離を検出する検出手段とを備え、
前記調整機構は、
前記プレッシャプレートに設けられて該プレッシャプレートから前記ダイヤフラムスプリングに向かうテーパ面を有するテーパ部と、
前記ダイヤフラムスプリングに設けられて前記テーパ面と当接するウェッジ側テーパ面を有するアジャストウェッジ部材とを備え、
前記テーパ部及び前記アジャストウェッジ部材を所定角度で相対回転させて前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の距離を所定変動量ずつ変更するよう構成し、
前記検出手段は、
前記テーパ部及び前記アジャストウェッジ部材を所定角度で相対回転させて前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の距離を所定変動量ずつ変更する要否を判定する判定手段を備え、
前記判定手段により前記テーパ部及び前記アジャストウェッジ部材を所定角度で相対回転させて前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の距離を所定変動量ずつ変更する必要性が判定されるときの連続回数に基づき前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の総変更距離を検出するよう構成したことを特徴とするクラッチ制御装置。 - 駆動源の出力軸と一体的に回転するフライホイールに対向するクラッチディスクをプレッシャプレート及びダイヤフラムスプリングを介して軸方向に変位させるアクチュエータを備え、該アクチュエータを駆動制御して該クラッチディスクと該フライホイールとの係合状態を変化させるクラッチ制御装置において、
前記プレッシャプレート及び前記ダイヤフラムスプリングの間に配設され、前記アクチュエータの駆動により該プレッシャプレート及び該ダイヤフラムスプリングの軸方向の距離を所定距離の限度内で変更し、前記クラッチディスクの摩耗補償を行う調整機構と、
前記調整機構による前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の総変更距離を検出する検出手段とを備え、
前記調整機構は、
前記プレッシャプレートに設けられて該プレッシャプレートから前記ダイヤフラムスプリングに向かうテーパ面を有するテーパ部と、
前記ダイヤフラムスプリングに設けられて前記テーパ面と当接するウェッジ側テーパ面を有するアジャストウェッジ部材とを備え、
前記テーパ部及び前記アジャストウェッジ部材を所定角度で相対回転させて前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の距離を所定変動量ずつ変更するよう構成し、
前記検出手段は、
前記テーパ部及び前記アジャストウェッジ部材を所定角度で相対回転させて前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の距離を所定変動量ずつ変更する要否を判定する判定手段を備え、
前記判定手段により前記テーパ部及び前記アジャストウェッジ部材を所定角度で相対回転させて前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の距離を所定 変動量ずつ変更する必要性が判定された累積回数に基づき前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の総変更距離を検出するよう構成したことを特徴とするクラッチ制御装置。 - 請求項1又は2に記載のクラッチ制御装置において、
前記検出手段により検出された前記プレッシャプレート及び前記ダイヤフラムスプリングの軸方向の総変更距離が前記所定距離に達したときに報知する報知手段を備えたことを特徴とするクラッチ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002282252A JP4189191B2 (ja) | 2002-09-27 | 2002-09-27 | クラッチ制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002282252A JP4189191B2 (ja) | 2002-09-27 | 2002-09-27 | クラッチ制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004116693A JP2004116693A (ja) | 2004-04-15 |
| JP4189191B2 true JP4189191B2 (ja) | 2008-12-03 |
Family
ID=32276446
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002282252A Expired - Fee Related JP4189191B2 (ja) | 2002-09-27 | 2002-09-27 | クラッチ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4189191B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4517825B2 (ja) * | 2004-11-12 | 2010-08-04 | アイシン精機株式会社 | クラッチの制御装置 |
| JP5918946B2 (ja) * | 2011-08-29 | 2016-05-18 | アイシン・エーアイ株式会社 | 車両の動力伝達制御装置 |
| JP5869266B2 (ja) * | 2011-09-06 | 2016-02-24 | アイシン・エーアイ株式会社 | 摩擦クラッチ装置 |
-
2002
- 2002-09-27 JP JP2002282252A patent/JP4189191B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004116693A (ja) | 2004-04-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2002221240A (ja) | アクチュエータの制御装置 | |
| JP2004197842A (ja) | クラッチ制御装置 | |
| JP3557378B2 (ja) | クラッチ制御装置 | |
| EP1657463B9 (en) | Clutch adjustment apparatus | |
| JP4178865B2 (ja) | クラッチ制御装置 | |
| JP4189191B2 (ja) | クラッチ制御装置 | |
| JP4617526B2 (ja) | クラッチの制御装置 | |
| JP4178863B2 (ja) | クラッチ制御装置 | |
| JP3609675B2 (ja) | クラッチ装置 | |
| EP1375950B1 (en) | Clutch control apparatus | |
| JP3840997B2 (ja) | クラッチの制御装置 | |
| JP2005273875A (ja) | クラッチ制御装置 | |
| JP4517825B2 (ja) | クラッチの制御装置 | |
| JP2002295517A (ja) | クラッチの制御装置 | |
| JP4412153B2 (ja) | クラッチ装置 | |
| JP2002357230A (ja) | クラッチの制御装置 | |
| JP5136605B2 (ja) | クラッチの制御装置 | |
| JP4038104B2 (ja) | クラッチ用アクチュエータ | |
| EP1245850B1 (en) | Clutch control apparatus | |
| JP2002295518A (ja) | クラッチの制御装置 | |
| JP2007139102A (ja) | 車両のレンジ切換え装置 | |
| JP2001263376A (ja) | クラッチの制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050805 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080214 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080219 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080421 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080909 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080912 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110919 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120919 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130919 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |