JP4163388B2 - インバータ装置 - Google Patents
インバータ装置 Download PDFInfo
- Publication number
- JP4163388B2 JP4163388B2 JP2001001412A JP2001001412A JP4163388B2 JP 4163388 B2 JP4163388 B2 JP 4163388B2 JP 2001001412 A JP2001001412 A JP 2001001412A JP 2001001412 A JP2001001412 A JP 2001001412A JP 4163388 B2 JP4163388 B2 JP 4163388B2
- Authority
- JP
- Japan
- Prior art keywords
- voltage
- sampling
- induced voltage
- motor
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
- H02P6/182—Circuit arrangements for detecting position without separate position detecting elements using back-emf in windings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of ac power input into dc power output; Conversion of dc power input into ac power output
- H02M7/42—Conversion of dc power input into ac power output without possibility of reversal
- H02M7/44—Conversion of dc power input into ac power output without possibility of reversal by static converters
- H02M7/48—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M7/53—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal
- H02M7/537—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters
- H02M7/539—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters with automatic control of output wave form or frequency
- H02M7/5395—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters with automatic control of output wave form or frequency by pulse-width modulation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
【発明の属する技術分野】
本発明は、ブラシレスDCモータを周波数制御するインバータ装置に関するものである。
【0002】
【従来の技術】
従来より3相4極ブラシレスDCモータを回転数制御する駆動装置として、120゜通電制御(矩形波通電制御)の方式で駆動するものと、180゜通電制御(正弦波通電制御)方式で駆動するものとがある。120゜通電制御方式については例えば特許第2642357号公報に開示され、180゜通電制御方式については例えば特開平7−245982号公報や特開平7−337079号公報に開示されている。
【0003】
上記の120゜通電方式は、モータ巻線の誘起電圧のゼロクロス信号を直接検出する方式であり、このゼロクロス信号に基づいて転流信号を変化させている。ゼロクロス信号の検出は、モータ巻線各相の誘起電圧と基準電圧とを比較することにより行なわれる。3相4極ブラシレスDCモータでは、ゼロクロス信号はモータ回転子一回転中に3相で12回発生する。すなわち、機械角30゜(電気角60゜)毎に発生する。導通角が120゜のとき、ゼロクロス信号はモータ巻線の各相の非導通期間すなわち電気角で60゜(=180゜−120゜)の範囲で連続して検出することができる。
【0004】
図16に、従来の120゜通電制御を用いて、モータ1を駆動したときの一つの相に流れる電流(相電流)の波形を示す。この図では、電気角に対する相電流を示しており、この場合、電流の全く流れない区間(例えば、150゜から210゜の区間)が電気角1周期において一相あたり2回存在する。モータ1が半回転する間、3相全体では電流が流れない区間は6回存在する。したがって、モータ1の一回転中には3相合計で12回存在する。このような電流が流れない区間において、電流が流れない相(U、V、Wの各相のうちいずれか一つ)に対してモータ1の誘起電圧を確認することができ、誘起電圧のゼロクロス位置を見つけることができる。
【0005】
一方、上記の180゜通電方式では、モータ巻線の中性点電位と、3相のインバータ出力電圧に対して3相Y結線した抵抗の中性点電位との差分電圧を増幅し、それを積分回路に入力し、その積分回路の出力信号と、その出力信号をフィルタ回路により処理し、直流カットした信号とを比較することにより、120°通電方式の誘起電圧に対応する位置検知信号を得る。この位置検知信号は、モータ一回転中に12回発生する。すなわち、機械角30゜(電気角60゜)毎に発生する。この方式では積分回路を用いるため、誘起電圧がゼロクロスする絶対的な位置は把握できず、位相補正等の複雑な位相制御が必要となる。
【0006】
【発明が解決しようとする課題】
ところで、120゜通電方式では、前述のようにモータ巻線の誘起電圧と基準値とを比較することによりのゼロクロスを検出しているため、モータ負荷の急変や電源電圧の急変がおきると、誘起電圧のゼロクロス信号が、モータ駆動電圧の領域内に隠れてしまい、検出できなくなることがある。このような状態になると、まず脱調現象が発生し、モータ駆動システムが停止してしまう。
【0007】
また、120゜通電方式において、モータ運転時の音・振動を軽減するためには、導通期間を拡大すればよいため、例えば、通電角を150゜程度に拡大して運転させようとすると、モータ巻線各相の誘起電圧を検出できる範囲が電気角で30゜(=180゜−150゜)と狭まり、その範囲内ではゼロクロスの検出ができない場合がある。このため、運転時においても脱調する危険性が増加し、また乱調等の不安定現象も発生し易くなる傾向がある。このことは、導通角をより大きくするほど、すなわち、導通角を180゜に近づけるほど安定したモータ運転がより困難になることを意味する。
【0008】
一方、180゜通電方式では、前述のように積分回路を用いるため、誘起電圧のゼロクロスの絶対的な位置の把握ができず、また、運転状態によってはゼロクロス位置と位置検知信号の位相差が大きく変化するため、位相補正等の複雑な制御が必要であり、その位相補正調整が困難であったり、また、制御演算が複雑になったりする。また、モータに中性点出力端子が必要であり、誘起電圧波形の3次高調波成分を利用しているため正弦波着磁マグネットを使用したモータでは使用不可能という問題がある。
【0009】
本発明は、上記課題を解決すべきなされたものであり、その目的とするところは、簡単なシステム構成で、機械的電磁ピックアップセンサの必要としない通電角180゜近傍の運転が可能とすることにより、機械系の音・振動を小さくし、機械系の防音、振動対策を簡略化でき、さらには、安価で信頼性の高いインバータ装置を提供することにある。
【0010】
【課題を解決するための手段】
本発明に係るインバータ装置は、スイッチング素子を含み、そのスイッチング素子の開閉により直流電圧を疑似交流電圧に変換し該疑似交流電圧をモータに対して出力する直流交流変換手段と、モータの巻線電圧を検出する電圧検出手段と、直流交流変換手段が出力する疑似交流電圧のPWM制御におけるデューティ比を制御するPWMデューティ制御手段と、PWM制御におけるオン区間のときに、電圧検出手段の出力電圧を入力し、所定の時間間隔毎にサンプリングしてデジタル値に変換し、サンプリング電圧として出力するA/D変換手段と、A/D変換手段からのPWM制御におけるオン区間にサンプリングされた2点以上のサンプリング電圧を相加平均処理することによりモータ巻線の誘起電圧を確定し、確定された誘起電圧によりモータの誘起電圧のゼロクロス位置を演算するとともにサンプリング指令を出力する制御演算手段と、制御演算手段からのサンプリング指令により前記誘起電圧の電圧振動成分に基づいて前記A/D変換手段のサンプリング時間ΔTsとサンプリング回数nとを制御するサンプリング時間制御手段とを有する。サンプリング時間制御手段は、PWM制御におけるオン区間の直後の誘起電圧に発生するリンギングの周波数をf L として、サンプリング時間ΔTsを、ΔTs≦1/f L を満足するように設定する。
【0014】
また、サンプリング時間制御手段は、PWM制御におけるオン区間の誘起電圧をサンプリングするように、サンプリング回数nを設定してもよい。
【0019】
【発明の実施の形態】
以下、添付の図面を用いて本発明に係るインバータ装置の実施形態を詳細に説明する。
【0020】
<インバータ装置の構成>
図1に本発明に係るインバータ装置の制御ブロック図を示す。インバータ装置は、3相4極ブラシレスDCモータ(以下「モータ」と略す。)1を回転数制御するモータ駆動装置である。この図において、インバータ装置は、直流電圧を疑似交流電圧に変換しモータ1に出力する直流交流変換部2と、モータ1の誘起電圧を検出する電圧検出部3と、電圧検出部3からのアナログ検出信号をデジタル信号に変換するA/D変換部4と、A/D変換部4からのデジタル信号からモータ1の誘起電圧のゼロクロス位置を検出する制御演算部5と、モータ1を回転数制御するための印加電圧・周波数・位相を制御するPWMデューティ信号を出力するPWMデューティ制御部6と、制御演算部5の指令によりA/D変換部4のサンプリング点(サンプリング時間ΔTs、サンプリング回数n)を制御するサンプリング時間制御部7とを備える。直流交流変換部2は高速に開閉する6つのスイッチング素子を有する。
【0021】
<インバータ装置の動作>
以上のように構成されたインバータ装置では、直流電圧が直流交流変換部2に入力され、周波数・位相可変の疑似交流電圧に変換されてモータ1に出力される。モータ1の回転数は、直流交流変換部2から出力される疑似交流電圧の周波数(以下「インバータ周波数」という。)、位相を変化させることにより制御される。このインバータ周波数はPWMデューティ制御部6により制御される。
【0022】
次に、インバータ装置の各部の動作を具体的に説明する。
電圧検出部3はモータ1の各相誘起電圧を降下させ、A/D変換部4にアナログ出力する。図2に電圧検出部3の構成を示す。電圧検出部3は、抵抗10a、10bとコンデンサ11で構成される。通常コンデンサ11はなくてもよいが、ノイズ除去用として、誘起電圧の波形がなまらない小さな時定数であればコンデンサ11を挿入するのが好ましい。直流交流変換部2に入力される直流電圧の値がVDCとすると、2つの抵抗10a、10bの抵抗値できまる分圧比kにより、検出される誘起電圧のアナログ電圧の振幅値はk×VDCとなる。なお、ここでは、説明の簡単化のため、k=1とする。
【0023】
直流交流変換部2は、高速に開閉する6つのスイッチング素子を含み、PWMデューティ制御部6からの制御信号を受け、その制御信号に基いてスイッチング素子の開閉動作を制御することにより、モータ1の駆動電圧を生成する。駆動電圧の大きさはPWM(パルス幅変調)制御され、デューティ比に応じて変化する。このため、PWMデューティ制御部6はPWM制御された制御信号(以下「PWMデューティ信号」という。)を出力する。
【0024】
A/D変換部4では、電圧検出部3からのアナログ出力電圧をサンプリングし、デジタル信号に変換し制御演算部5に出力する。
【0025】
制御演算部5は、サンプリングを実行させるための指令であるサンプリング指令をサンプリング時間制御部7に出力する。サンプリング時間制御部7は、サンプリング指令を受けると、サンプリング時間ΔTsとサンプリング回数nに関する制御指令をA/D変換部4に出力する。A/D変換部4はその制御指令情報に基き、電圧検出部3からの出力電圧をサンプリングする際のサンプリング点を決定する。また、制御演算部5は、A/D変換部4によりサンプリングされた電圧から誘起電圧を求め、それに基いてゼロクロス位置を演算し、ベースパターン信号と、PWM制御のための情報を含む回転位相情報とをPWMデューティ制御部6に出力する。
【0026】
PWMデューティ制御部6は、直流交流変換部2の各スイッチング素子の開平を制御するベースパターン信号を出力し、駆動電圧のインバータ周波数を制御する。
【0027】
直流交流変換部2の各スイッチング素子はベースパターン信号に応じて例えば以下のように制御される。すなわち、第1のベースパターンでは、U相上アームスイッチング素子と、V相下アームスイッチング素子がオンされる。第2のベースパターンでは、U相上アームスイッチング素子と、W相下アームスイッチング素子がオンされる。第3のベースパターンでは、V相上アームスイッチング素子と、W相下アームスイッチング素子がオンされる。第4のベースパターンでは、V相上アームスイッチング素子と、U相下アームスイッチング素子がオンされる。第5のベースパターンでは、W相上アームスイッチング素子と、U相下アームスイッチング素子がオンされる。第6のベースパターンでは、W相上アームスイッチング素子と、V相下アームスイッチング素子がオンされる。このように、ベースパターンが切り替わることにより、駆動電圧が印加されるモータの電機子巻線の相も切り替わる。
【0028】
制御演算部5は、これらのベースパターンの転流切換ための回転位相情報を出力する。すなわち、制御演算部5は、モータ1の3相誘起電圧のゼロクロス位置を演算し、ゼロクロス信号を出力する。このゼロクロスはモータ回転子が機械的に一回転する間に12回発生する。モータ1が等速回転を行っていれば、ゼロクロス信号は、ほぼ機械角30゜刻みで発生する。制御演算部5は、A/D変換部4のサンプリング電圧からゼロクロス位置を演算し、PWMデューティ制御部6はそのゼロクロス位置に基づいてベースパターンを順次切り換えながら、PWMデューティ信号を出力する。PWMデューティ信号はベースパターン信号にPWM情報(デューティ比)が重畳した信号である。
【0029】
以上のように、インバータ装置においては、PWMデューティ制御部6が制御演算部5からの回転位相情報に基き直流交流変換部2のインバータ周波数を変化させながら、モータ1を回転数制御する。このとき、モータ1の回転子の磁極位置は誘起電圧のゼロクロス位置からは電機子反作用の影響により直接確定することはできず、それらの間には位相差が生ずる。この位相差は運転負荷に依存するため、真の磁極位置を誘起電圧のゼロクロス位置からマイコン演算により特定することは困難である。しかし、真の磁極位置は特定できなくても、誘起電圧のセロクロス位置のみによりモータ1を回転数制御することは十分可能である。
【0030】
<インバータ装置の通電制御>
図3は、本実施形態のインバータ装置による120°通電制御における電機子巻線の一つの相における電流(相電流)波形を示した図である。図3では、通電角をWxとし、電気角Xから電気角(X+Wx)までの間通電を行ない、その後、電気角Yから通電角Wxの間通電を行っている。すなわち、本実施形態のインバータ装置では、電気角(X+Wx)から電気角Yの間は通電は行なわず、この間にゼロクロス検出のための誘起電圧の検出を行なうようにしている。図3でWx=120゜とすると、図16に示す従来技術の場合と同様となる。ここで、通電角Wxは次式を満たすように設定する。
Wx<180゜ (1)
すなわち、上式を満たせば、電気角の(180゜−Wx)の範囲でモータ1の誘起電圧を確認することができる。このため、モータ1の運転において回転子位置を検出するための位置センサが不要となる。
【0031】
なお、導通角Wxが次式を満たすときは、120゜通電制御で説明した6通りのベースパターン信号に加えて、3相正弦波駆動用のベースパターン信号を追加する必要がある。
150゜<Wx<180゜ (2)
つまり、基本的には、3相のうちのいずれか1つにおいて電流がオフとなる電気角の区間において、上記の120゜通電制御用の6つのベースパターンを使用する。それ以外の区間では、3相正弦波駆動用のベースパターンを使用する。3相正弦波駆動用のベースについては、通常の3相正弦波PWM制御として周知であるので、詳細な説明は省略する。
【0032】
<ゼロクロス位置の検出>
次に、インバータ装置における回転子位置の検出のためのゼロクロス位置の特定方法について説明する。前述のように、ゼロクロス位置検出のためのモータ1の誘起電圧の検出は、相電流が流れていない区間に行なわれる。例えば、図3において、電気角で−Xから+Xまでの区間、又は、電気角で(X+Wx)からYまでの区間に行なわれる。以下、このような相電流が流れていない区間を「相電流オフ区間」という。
【0033】
制御演算部5は、相電流オフ区間の所定の点(電気角)においてモータ巻線の誘起電圧を検出し、その検出値と、ゼロクロスであると判断する基準電圧値(本例では、VDC/2)との差を求め、その差に基いてゼロクロスが発生する点(電気角)を予測して検出する。このように、相電流オフ区間の任意の点で検出された誘起電圧に基いてゼロクロス位置を検出するため、相電流オフ区間において誘起電圧が検出される限り、相電流オフ区間内に実際のゼロクロス発生点が存在するか否かにかかわらずゼロクロス位置を検出することができる。したがって、相電流オフ区間が確保される限り、通電角を180゜近くまで十分広く確保することができ、より円滑なモータ運転が可能となる。
【0034】
図4は、相電流オフ区間におけるモータ1の一つの相の誘起電圧波形を拡大して示した図である。この図において電気角で−Xから+Xまでの区間が、モータ1の誘起電圧12を確認できる区間である。このような誘起電圧を確認できる区間は、3相分で考えると電気角60゜の領域毎に一回存在し、モータ1の一回転中では12回存在する。また、リカバリ電流回復角Rx(≧0)の区間では、回生電流が流れているため、誘起電圧をサンプリングすることはできない。このため、サンプリングが可能となる電気角は次式を満たす必要がある。
−X+Rx<サンプリング可能な電気角<X (3)
X=(180゜−Wx)/2 (4)
【0035】
次に、ゼロクロス点検出時のA/D変換部4と制御演算部5の動作を説明する。なお、図4において、位置(電気角)"Z"がゼロクロス点の位置であるとする。
【0036】
まず、A/D変換部4は、電気角(−X+TS0)にて誘起電圧をサンプリングしてデジタル値V0に変換する。ここで、TS0はウエイト角を示し、制御演算部5からのサンプリング指令によって与えられ、PWMデューティ信号のデューティパルスがオンとなる区間(以下「PWMオン区間」という。)の部分でサンプリングできるようにサンプリングのタイミングは制御される。したがって、図4に示すように、PWMオン区間Ton内でサンプリングが行なわれ、PWMデューティ信号のデューティパルスがオフとなる区間(以下「PWMオフ区間」という。)Toffではサンプリングは行なわれないようになっている。
【0037】
また、ウェイト角TS0とリカバリ電流回復角Rxとは次式の関係を満たすように設定し、これにより、リカバリ電流回復角Rxの区間での検出を行なわないようにしている。
TS0>Rx (5)
【0038】
図4において、誘起電圧のゼロクロス位置は位置Zであり、サンプリングした電圧V0と、ゼロクロス位置Zでの電圧VDC/2との電圧差ΔV0は、
ΔV0=V0−VDC/2 (6)
で求める。
【0039】
制御演算部5は上記のようにして電圧差ΔV0を計算した後、さらに、その電圧差ΔV0と、インバータ角周波数ω1と、モータ1のマグネットの誘起電圧定数E0とを用いて、サンプリング位置とゼロクロス位置との位相差Δθ0を求める。|Δθ0|≒0であれば、誤差Δθ0は一般に次式で与えられる。
Δθ0≒2/(1/√3・ω1・E0)・ΔV0 (7)
式(7)によって位相差Δθ0が求まれば、サンプリング位置と位相差Δθ0とからゼロクロス位置を検出することができる。
【0040】
上記のようにしてゼロクロス位置が検出できれば、誘起電圧のみの観測(3相分の観測)でモータ1の回転位相制御が可能となる。
【0041】
ここで、電圧差ΔV0を得るための必要条件は、相電流オフ期間においてPWMオン区間が少なくとも1つ含まれることである。このため、直流交流変換部2のスイッチング素子の開閉周波数(=キャリア周波数)fc、インバータ周波数f1、通電角Wxが次の関係を満たす必要がある。
fc≧f1×360゜/(180゜−Wx−Rx) (8)
【0042】
上式をみたすようにキャリア周波数fcを設定することにより、相電流オフ期間すなわち相電流オフ期間開始角から相電流オフ期間終了角の間に、PWM制御におけるキャリア周期が少なくとも1つ含まれる。このため、PWMオン区間が少なくとも1回は存在し、サンプリング電圧V0すなわち電圧差ΔV0を得ることが可能となる。
【0043】
(モータの等価回路)
図5はモータ1の等価回路図である。R1は巻線一次抵抗、Lu・Lv・Lwは各相のインダクタンス(合成分)、Eu・Ev・Ewは各相の界磁誘起電圧、Iu・Iv・Iwは各相の相電流を表している。ここで、界磁誘起電圧とは、モータ1が回転したときに、マグネット(界磁)のみによる発生する誘起電圧を意味している。
【0044】
同図において、W−V相間に直流電圧VDCが印加されている場合を考える。この時、W相の電位はVDC、V相の電位は0、U相は解放となり誘起電圧Vu21が観測される。なお、巻線中性点22は各相の中点である。W−V相間の電位差はPWM制御によりVDCと0Vを交互に繰り返す。また、PAM制御時には、常時電位差がVDCとなる。この時の誘起電圧Vu21の電圧波形は図4の誘起電圧に対応している。図4の相電流オフ開始角17と相電流オフ終了角18の区間は、W−V相に直流電圧VDCが印加されてPWM制御が行われている。
【0045】
また、この状態において、図5に示す界磁誘起電圧EuとU相インダクタンスLuの電気角に対する電気的特性は、図6に示す界磁誘起電圧Eu24とU相インダクタンスLu23となる。図6に示すように、界磁誘起電圧Eu24は、振幅がω1・E0となる正弦波状交流電圧であり、U相インダクタンスLu23は、最大値がLq、最小値がLd(Lq≧Ld>0)、そのDC成分が(Lq+Ld)/2となる正弦波状交流電圧である。
【0046】
界磁誘起電圧Eu24が最大値Lqもしくは最小値Ldをとるとき、U相インダクタンスLu23も最大値Lqをとる。界磁誘起電圧Eu24がゼロとなるときは、U相インダクタンスLu23は最小値Ldをとる。
【0047】
界磁誘起電圧Eu24のゼロクロス位置25はモータ1のマグネットの磁極位置に完全対応している。しかしながら、誘起電圧Vu21すなわち誘起電圧12は、U相インダクタンスLu23の電機子反作用の影響により、ゼロクロス位置14と、界磁誘起電圧Eu24のゼロクロス位置25との電気角は一致せず、ある位相角をもつ。この位相角はモータ1の運転状態によって変化するので、その位相角特定は困難である。
【0048】
図5において、W−V相に直流電圧VDCが印加されてPWM制御もしくはPAM制御が行われており、かつW−V相の電位差がVDC、かつIu=0であるなら誘起電圧を検出できるため、サンプリング電圧(位置Zでの)を得ることができる。
【0049】
<ゼロクロス検出に用いる誘起電圧の検出>
インバータ装置は一般的に、抵抗、インダクタンス及びマグネットの磁気回路で構成されるモータ1と、キャパシタンスを含むスイッチング素子とを含み、その誘起電圧に関する回路方程式は二階線形常微分方程式で与えられる。また、その方程式は虚根をもつ。従って、PWMオン区間(Tonの区間)に現れる誘起電圧の波形は、正確には図7に示すような、時間の経過とともに振動しながら一定値に収束する振動波形となる。図7において、V0mj(j≧1の整数)は誘起電圧12の極大点・極小点を示し、tmjはそれらの点における時刻を示す。電圧V00は誘起電圧12の収束電圧を示し、真の誘起電圧である。
【0050】
図7に示す波形を時間tに関して数式化すれば次式となる。
V0≒V00・(1−exp(−k・t)・sin(2π・fL・t−φ)) (9)
ここで、k(≧0)とφ(≧0)は定数であり、fL(≧0)は図7において電圧振動成分の周波数を意味し、しばしばリンギング周波数と呼ばれる。これらの諸量は制御システムが決まれば自動的に決まる数値であるため定数として扱える。
【0051】
このように一般的に誘起電圧はある時区間においては振動しているすなわち過渡状態にあるため、任意の時間に求めたサンプリング電圧は必ずしも、真の誘起電圧数値である収束電圧V00を表しているとは限らない。誘起電圧に基いてゼロクロス位置が検出され、それによりスイッチング素子の切替えタイミングが決定されることから、誘起電圧のデータ信頼性・精度は、制御システム全体の動作に大きく影響する。故に、この誘起電圧は正確に求められることが望まれる。
【0052】
そこで、本インバータ装置では、以下に示す種々の方法で誘起電圧を正確かつ容易に検出する。なお、以下の制御において、サンプリング時間ΔTsとサンプリング回数nの設定はサンプリング時間制御部5により、誘起電圧検出値の確定については制御演算部7により行なわれる。
【0053】
(誘起電圧の検出方法1)
本方法では、図8に示すように所定のサンプリング時間毎に検出電圧をサンプリングし、そのサンプリング電圧のうちの最後にサンプリングされた電圧を誘起電圧12の収束値として確定する。図8において、サンプリング電圧30をV0Sy、サンプリングする時刻をtsy、各サンプリング時間(間隔)をΔTsxy(x,yは、0≦x≦n−1、1≦y≦nを満たす整数)としたとき、サンプリング時間ΔTsxy(>0)とサンプリング回数nとは次の関係を満たすように設定される。
ΔTsxy ≦Ton (10)
Σ(ΔTsxy)≦Ton (Σ:n個の総和) (11)
このようにすれば、PWMオン区間において誘起電圧を必ずサンプリングすることが可能となる。特に、
Σ(ΔTsxy)=Ton (12)
を満足するように各サンプリング時間ΔTsxyとサンプリング回数nを設定する。そして、サンプリング電圧V0Syの最終値であるV0Snを誘起電圧V0と確定する。これにより得られる電圧値V0は、収束電圧V00とほぼ等しい値であると考えられる。このようにすれば、容易に収束電圧V00を求めることができる。
【0054】
このため、サンプリング時間制御部7は、制御演算部5のサンプリング指令に基きサンプリング時間ΔTsとサンプリング回数nをA/D変換部4に出力する。A/D変換部4はそのサンプリング指令情報に基づき、誘起電圧12をn回(n≧1)サンプリングしてサンプリング電圧を得る。制御演算部5は上記の方法で、最終のサンプリング電圧値から誘起電圧12を確定する。
【0055】
(誘起電圧の検出方法2)
本方法では、図9に示すように、検出方法1においてn=1とし、すなわち、1回だけサンプリングするようにし、且つ、そのサンプリングを所定時間(ΔTMIN)の経過後に行なうようにする。サンプリング時間ΔTs01は次式を満足するように設定する。
ΔTs01=ts1=Ton≧ΔTMIN (13)
ここで、ΔTMINは、誘起電圧の電圧振動成分の極大値と極小値の差が、ほぼ収束したと考えられる所定範囲内に収まるようになるまでの時間に設定する。また所定範囲とは、誘起電圧の電圧振動の過渡状態がほぼ終了し、定常状態に移行したと考え得る範囲である。このようにして求めたサンプリング電圧31(V0S1)は誘起電圧12(V0)の真の値とほぼ等しいと考えられる。
【0056】
(誘起電圧の検出方法3)
本方法では、図10に示すように、検出方法1においてn=1とし、すなわち、1回だけサンプリングするようにし、且つ、そのサンプリングを振動が収束したと考えられる所定時間(ΔTMAX)経過後に行なう。サンプリング時間ΔTs01は次式を満足するように設定する。
ΔTMAX≦ΔTs01≦Ton (14)
このようにして求めたサンプリング電圧32の値V0S1は、
V0S1=V00=V0 (15)
をみたすと考えられる。したがって、ΔTMAXは誘起電圧の電圧振動が定常状態になったと考えられる時間に、具体的には、V00=V0S1を満足するサンプリング時間ΔTsの最小値に設定する。
【0057】
また検出方法1において、n個のサンプリング電圧V0Syを求め、これらを相加平均して誘起電圧V0を次のように求めて確定することもできる。
V0=Σ(V0Sy)/n (16)
この場合、外乱ノイズに対し影響の受けにくい誘起電圧V0を確定できる。
【0058】
(誘起電圧の検出方法4)
本方法では、図11に示すように、検出方法1においてn=1とし、すなわち、1回だけサンプリングするようにし、このサンプリング値と式(9)を用いて誘起電圧(収束電圧V0)を求める。この場合、k、fL、φを事前に求めておき、これらの値とサンプリング電圧33(V0S1)と、次式とにより収束電圧V0を求める。
V0=V0S1/(1−exp(−k・ts1)・sin(2π・fL・ts1−φ)) (17)
【0059】
また、検出方法1においてn=4とし、4回サンプリングして電圧V0S1、V0S2、V0S3、V0S4を得るようにしてもよい。この場合には、式(9)を用いて以下の連立方程式を立て、それらを解くことにより、k、fL、φが未知の場合にもV0を確定できる。
V0=V0S1/(1−exp(−k・ts1)・sin(2π・fL・ts1−φ)) (18a)
V0=V0S2/(1−exp(−k・ts2)・sin(2π・fL・ts2−φ)) (18b)
V0=V0S3/(1−exp(−k・ts3)・sin(2π・fL・ts3−φ)) (18c)
V0=V0S4/(1−exp(−k・ts3)・sin(2π・fL・ts3−φ)) (18d)
【0060】
(誘起電圧の検出方法5)
本方法では、検出方法1において次式を満足するようにサンプリング時間ΔTsを設定したものである。
ΔTs≦1/fL (19)
このようにすれば、図12に示すようにリンギング成分をもつ誘起電圧期間を、時間軸上において高分解能にサンプリングすることができるので、上述したいずれのV0を確定する方法をも適用できる。
【0062】
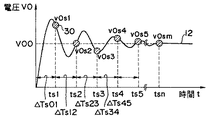
(誘起電圧の検出方法6)
ここでは、上記の検出方法5において、サンプリング時間ΔTsをリンギング周波数の逆数に対して十分に小さく設定し、極大点、極小点のサンプリング電圧を、収束電圧決定のためのサンプリング電圧として採用する。図13に示すように、サンプリング電圧35をV0smy、サンプリング時刻をtsmy(yは正の整数)としている。tsmyは、サンプリング時間ΔTsの1次関数で表される。
【0063】
(誘起電圧の検出方法7)
本方法では、図14に示すように極大点をサンプリングして誘起電圧V0を確定する。サンプリング電圧が極大点となる時には、誘起電圧の電圧方程式は、y=1とすると、以下の方程式となる。

【0064】
従って、定数kのみ既知であれば、極大点となる一つのサンプリング電圧36(V0sm1)により、誘起電圧V0を確定できることになる。つまり、リンギング周波数fLやφに全く依存せずにV0を確定できるので、精度よく誘起電圧を求めることが可能である。
【0065】
さらに、y=3とすると、そのサンプリング電圧により以下の電圧方程式となる。
【0066】
(誘起電圧の検出方法8)
本方法では、図15に示すように極小点をサンプリングして誘起電圧V0を確定する。サンプリング電圧37が極小点である場合には、誘起電圧の電圧方程式は、y=2とし、サンプリング電圧V0sm2により以下のようになる。
【0067】
さらに、y=4とすると、以下の電圧方程式が得られる。
【0068】
以上のような方法でサンプリング点の決定を行なうことにより、電圧検出の精度を向上できるため、より精度よいモータ制御が実現できる。
【0069】
【発明の効果】
本発明のインバータ装置は、モータ巻線の誘起電圧の検出のためのA/D変換手段のサンプリング時間ΔTsとサンプリング回数nとを適宜制御する。これにより、モータ電流の通電角を簡単な回路構成にて180゜近傍まで拡大した場合でも、精度よくモータ回転子位置に基くモータ駆動制御ができるので、モータが発生する音・振動を低減し、機械系の防音、振動対策を簡略化でき、回路コストが安価なインバータ装置を実現できる。
【0071】
また、サンプリング時間ΔTsを、PWM制御におけるオン区間の直後の誘起電圧に発生するリンギングの周波数がfLのときに、ΔTs≦1/fLを満足するように設定する。これにより、高周波なリンギング成分をもつ誘起電圧を高分解能に電圧サンプリングできるので、誘起電圧を正確に確定できる。また、サンプリングされた電圧を相加平均処理することにより、誘起電圧上にノイズ電圧等の外乱電圧が瞬間的に印加されたとしても、大きな影響を受けないため精度よく誘起電圧を確定でき、インバータシステムの安定性と性能をさらに高めることができる。
【0073】
また、サンプリング回数nを、PWM制御におけるオン区間の誘起電圧をサンプリングするように設定してもよい。これにより、正常な誘起電圧以外の電圧要素をサンプリングすることが全くなくなり、誘起電圧サンプリングエラーによるインバータシステムの異常停止を防止できる。
【図面の簡単な説明】
【図1】 本発明に係るインバータ装置の制御ブロック図。
【図2】 インバータ装置の電圧検出部の構成図。
【図3】 ブラシレスDCモータの一の相の電気角に対する相電流波形を示した図。
【図4】 制御演算部においてサンプリング電圧V1から位相差Δθ1を算出するための動作を説明するための図。
【図5】 ブラシレスDCモータの等価回路図。
【図6】 ブラシレスDCモータにおいて、U相インダクタンスLu及び界磁誘起電圧Euの電気角に対する特性を示した図。
【図7】 相電流オフ区間の誘起電圧波形を説明するための図。
【図8】 制御演算部が誘起電圧の確定のために用いるサンプリング点を説明するための図(検出方法1)。
【図9】 制御演算部が誘起電圧の確定のために用いるサンプリング点を説明するための図(検出方法2)。
【図10】 制御演算部が誘起電圧の確定のために用いるサンプリング点を説明するための図(検出方法3)。
【図11】 制御演算部が誘起電圧の確定のために用いるサンプリング点を説明するための図(検出方法4)。
【図12】 制御演算部が誘起電圧の確定のために用いるサンプリング点を説明するための図(検出方法5)。
【図13】 制御演算部が誘起電圧の確定のために用いるサンプリング点を説明するための図(検出方法6)。
【図14】 制御演算部が誘起電圧の確定のために用いるサンプリング点を説明するための図(検出方法7)。
【図15】 制御演算部が誘起電圧の確定のために用いるサンプリング点を説明するための図(検出方法8)。
【図16】 従来の120゜通電制御における相電流波形を示した図。
【符号の説明】
1 ブラシレスDCモータ(BDM)
2 直流交流変換部
3 電圧検出部
4 A/D変換部
5 制御演算部
6 PWMデューティ制御部
7 サンプリング時間制御部
Claims (2)
- スイッチング素子を含み該スイッチング素子の開閉により直流電圧を疑似交流電圧に変換し該疑似交流電圧をモータに対して出力する直流交流変換手段と、
前記モータの巻線電圧を検出する電圧検出手段と、
前記直流交流変換手段が出力する前記疑似交流電圧のPWM制御におけるデューティ比を制御するPWMデューティ制御手段と、
PWM制御におけるオン区間のときに、前記電圧検出手段の出力電圧を入力し、所定の時間間隔毎にサンプリングしてデジタル値に変換し、サンプリング電圧として出力するA/D変換手段と、
該A/D変換手段からのPWM制御におけるオン区間にサンプリングされた2点以上のサンプリング電圧を相加平均処理することによりモータ巻線の誘起電圧を確定し、該確定された誘起電圧により前記モータの誘起電圧のゼロクロス位置を演算するとともにサンプリング指令を出力する制御演算手段と、
該制御演算手段からのサンプリング指令により前記誘起電圧の電圧振動成分に基づいて前記A/D変換手段のサンプリング時間ΔTsとサンプリング回数nとを制御するサンプリング時間制御手段とを有し、
上記サンプリング時間制御手段は、PWM制御におけるオン区間の直後の誘起電圧に発生するリンギングの周波数をf L として、サンプリング時間ΔTsを、ΔTs≦1/f L を満足するように設定することを特徴とするインバータ装置。 - 上記サンプリング時間制御手段は、PWM制御におけるオン区間の誘起電圧をサンプリングするように、上記サンプリング回数nを設定することを特徴とする請求項1に記載のインバータ装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001001412A JP4163388B2 (ja) | 2001-01-09 | 2001-01-09 | インバータ装置 |
| KR10-2001-0086702A KR100432389B1 (ko) | 2001-01-09 | 2001-12-28 | 인버터 장치 |
| CNB021015716A CN1241319C (zh) | 2001-01-09 | 2002-01-08 | 转换装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001001412A JP4163388B2 (ja) | 2001-01-09 | 2001-01-09 | インバータ装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2002204592A JP2002204592A (ja) | 2002-07-19 |
| JP2002204592A5 JP2002204592A5 (ja) | 2005-10-20 |
| JP4163388B2 true JP4163388B2 (ja) | 2008-10-08 |
Family
ID=18870054
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001001412A Expired - Fee Related JP4163388B2 (ja) | 2001-01-09 | 2001-01-09 | インバータ装置 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP4163388B2 (ja) |
| KR (1) | KR100432389B1 (ja) |
| CN (1) | CN1241319C (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004343862A (ja) * | 2003-05-14 | 2004-12-02 | Matsushita Electric Ind Co Ltd | モータ制御装置 |
| JP4226948B2 (ja) * | 2003-05-26 | 2009-02-18 | パナソニック株式会社 | Dcブラシレスモータの制御装置 |
| US7919932B2 (en) | 2007-12-20 | 2011-04-05 | Samsung Led Co., Ltd. | Apparatus and method for controlling lighting brightness through digital conversion |
| JP5523821B2 (ja) * | 2009-12-28 | 2014-06-18 | セミコンダクター・コンポーネンツ・インダストリーズ・リミテッド・ライアビリティ・カンパニー | モータ駆動回路 |
| JP5701503B2 (ja) * | 2009-12-28 | 2015-04-15 | セミコンダクター・コンポーネンツ・インダストリーズ・リミテッド・ライアビリティ・カンパニー | モータ駆動回路 |
| JP5552701B2 (ja) * | 2011-09-20 | 2014-07-16 | 日立オートモティブシステムズ株式会社 | ブラシレスモータの駆動装置 |
| KR101496809B1 (ko) * | 2012-11-30 | 2015-02-27 | 삼성전기주식회사 | 모터 구동 제어 장치, 모터 구동 제어 방법 및 그를 이용한 모터 |
| CN103684139B (zh) * | 2013-12-10 | 2017-01-18 | 吴凯 | 无刷直流电机及其转子位置定位方法 |
| CN104716876A (zh) * | 2015-04-10 | 2015-06-17 | 苏州百微成智能科技有限公司 | 一种新型无刷电机控制方法 |
| TWI578846B (zh) * | 2015-08-31 | 2017-04-11 | Chih Min Liu | Control system of light emitting device |
| CN108980441B (zh) * | 2018-08-21 | 2020-01-07 | 广西柳工机械股份有限公司 | 基于pwm的比例电磁阀驱动方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04117198A (ja) * | 1990-09-06 | 1992-04-17 | Seiko Instr Inc | Acサーボモータ制御装置 |
| EP0602977B1 (en) * | 1992-12-17 | 1998-07-15 | STMicroelectronics, Inc. | Method and apparatus for operating polyphase DC motors using a PWM chopping signal in zero crossing determination |
| KR950015956A (ko) * | 1993-11-11 | 1995-06-17 | 이희종 | 전동기의 회전속도 측정방법 |
| JP3518901B2 (ja) * | 1994-09-09 | 2004-04-12 | 株式会社日立製作所 | ブラシレス直流モータの駆動方法及び駆動装置 |
| KR19980057561U (ko) * | 1997-02-05 | 1998-10-15 | 이종수 | 인버터의 데드 타임 보상장치 |
| JPH1198884A (ja) * | 1997-09-24 | 1999-04-09 | Fujitsu General Ltd | ブラシレスモータの制御方法 |
| JP2000232797A (ja) * | 1999-02-10 | 2000-08-22 | Toshiba Corp | ブラシレスモータの駆動装置 |
-
2001
- 2001-01-09 JP JP2001001412A patent/JP4163388B2/ja not_active Expired - Fee Related
- 2001-12-28 KR KR10-2001-0086702A patent/KR100432389B1/ko not_active IP Right Cessation
-
2002
- 2002-01-08 CN CNB021015716A patent/CN1241319C/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN1365183A (zh) | 2002-08-21 |
| KR100432389B1 (ko) | 2004-05-22 |
| KR20020060057A (ko) | 2002-07-16 |
| CN1241319C (zh) | 2006-02-08 |
| JP2002204592A (ja) | 2002-07-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7119530B2 (en) | Motor phase current measurement using a single DC bus shunt sensor | |
| Su et al. | Low-cost sensorless control of brushless DC motors with improved speed range | |
| US7166975B2 (en) | Apparatus and method for driving the multiphase motor using the magnetic pole position detector | |
| JP4163388B2 (ja) | インバータ装置 | |
| CN112204873B (zh) | 永磁同步电机控制装置、电动车以及磁极极性判别方法 | |
| JP2004343862A (ja) | モータ制御装置 | |
| US11031899B1 (en) | Method for operating an electronically commutated synchronous machine, and actuation circuit | |
| JP2001119983A (ja) | モータ駆動装置 | |
| JP4121718B2 (ja) | インバータ装置 | |
| JP2009247089A (ja) | ブラシレスモータ用インバータの制御方法及びそれを用いた装置 | |
| JP2007014115A (ja) | モータ制御装置 | |
| CN111527691A (zh) | 用于运行同步电机的方法 | |
| Sahu et al. | Improved Speed Range Brushless DC Motors: A Low-Cost Sensorless Control | |
| JP7527485B2 (ja) | インバータ制御装置、インバータ制御方法 | |
| JP4281408B2 (ja) | モータ制御装置 | |
| JP4380296B2 (ja) | モータ制御装置 | |
| JP2005137120A (ja) | モータ制御装置 | |
| JPS61191291A (ja) | 無整流子直流電動機の位置検出回路 | |
| JP2006180651A (ja) | モータ制御装置 | |
| JP4281412B2 (ja) | モータ制御装置 | |
| JP2004343949A (ja) | モータ制御装置 | |
| JP2009077506A (ja) | モータ制御装置 | |
| CN117595739A (zh) | 电动机控制装置 | |
| JP4229523B2 (ja) | ブラシレスモータの駆動装置 | |
| JP2007104861A (ja) | モータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050615 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071016 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071112 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080325 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080522 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080624 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080724 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110801 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110801 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120801 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130801 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130801 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140801 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |