JP4150924B2 - 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 - Google Patents
画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 Download PDFInfo
- Publication number
- JP4150924B2 JP4150924B2 JP2004078412A JP2004078412A JP4150924B2 JP 4150924 B2 JP4150924 B2 JP 4150924B2 JP 2004078412 A JP2004078412 A JP 2004078412A JP 2004078412 A JP2004078412 A JP 2004078412A JP 4150924 B2 JP4150924 B2 JP 4150924B2
- Authority
- JP
- Japan
- Prior art keywords
- projection
- image
- area
- imaging
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000003672 processing method Methods 0.000 title claims description 16
- 238000003384 imaging method Methods 0.000 claims description 184
- 230000003287 optical effect Effects 0.000 claims description 23
- 238000010586 diagram Methods 0.000 description 39
- 239000004973 liquid crystal related substance Substances 0.000 description 9
- 238000000034 method Methods 0.000 description 7
- 238000006243 chemical reaction Methods 0.000 description 5
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 239000013598 vector Substances 0.000 description 3
- 101100321992 Drosophila melanogaster ABCD gene Proteins 0.000 description 2
- 238000005401 electroluminescence Methods 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- PCTMTFRHKVHKIS-BMFZQQSSSA-N (1s,3r,4e,6e,8e,10e,12e,14e,16e,18s,19r,20r,21s,25r,27r,30r,31r,33s,35r,37s,38r)-3-[(2r,3s,4s,5s,6r)-4-amino-3,5-dihydroxy-6-methyloxan-2-yl]oxy-19,25,27,30,31,33,35,37-octahydroxy-18,20,21-trimethyl-23-oxo-22,39-dioxabicyclo[33.3.1]nonatriaconta-4,6,8,10 Chemical compound C1C=C2C[C@@H](OS(O)(=O)=O)CC[C@]2(C)[C@@H]2[C@@H]1[C@@H]1CC[C@H]([C@H](C)CCCC(C)C)[C@@]1(C)CC2.O[C@H]1[C@@H](N)[C@H](O)[C@@H](C)O[C@H]1O[C@H]1/C=C/C=C/C=C/C=C/C=C/C=C/C=C/[C@H](C)[C@@H](O)[C@@H](C)[C@H](C)OC(=O)C[C@H](O)C[C@H](O)CC[C@@H](O)[C@H](O)C[C@H](O)C[C@](O)(C[C@H](O)[C@H]2C(O)=O)O[C@H]2C1 PCTMTFRHKVHKIS-BMFZQQSSSA-N 0.000 description 1
- 240000001973 Ficus microcarpa Species 0.000 description 1
- 241000872198 Serjania polyphylla Species 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000003702 image correction Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
Images


















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/72—Modifying the appearance of television pictures by optical filters or diffusing screens
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N9/00—Details of colour television systems
- H04N9/12—Picture reproducers
- H04N9/31—Projection devices for colour picture display, e.g. using electronic spatial light modulators [ESLM]
- H04N9/3179—Video signal processing therefor
- H04N9/3182—Colour adjustment, e.g. white balance, shading or gamut
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/14—Picture signal circuitry for video frequency region
- H04N5/20—Circuitry for controlling amplitude response
- H04N5/205—Circuitry for controlling amplitude response for correcting amplitude versus frequency characteristic
- H04N5/208—Circuitry for controlling amplitude response for correcting amplitude versus frequency characteristic for compensating for attenuation of high frequency components, e.g. crispening, aperture distortion correction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/14—Picture signal circuitry for video frequency region
- H04N5/21—Circuitry for suppressing or minimising disturbance, e.g. moiré or halo
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N9/00—Details of colour television systems
- H04N9/12—Picture reproducers
- H04N9/31—Projection devices for colour picture display, e.g. using electronic spatial light modulators [ESLM]
- H04N9/3179—Video signal processing therefor
- H04N9/3185—Geometric adjustment, e.g. keystone or convergence
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N9/00—Details of colour television systems
- H04N9/12—Picture reproducers
- H04N9/31—Projection devices for colour picture display, e.g. using electronic spatial light modulators [ESLM]
- H04N9/3191—Testing thereof
- H04N9/3194—Testing thereof including sensor feedback
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- Geometry (AREA)
- Transforming Electric Information Into Light Information (AREA)
- Projection Apparatus (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
- Controls And Circuits For Display Device (AREA)
Description
前記投写対象物に投写された前記単色キャリブレーション画像を撮像して第1の撮像情報を生成するとともに、前記投写対象物に投写された前記複数色キャリブレーション画像を撮像して第2の撮像情報を生成する撮像手段と、
前記第1の撮像情報に基づく画素ごとの画像信号値の差異に基づき、前記撮像手段の撮像領域における前記投写対象物の4隅の座標を示す投写対象領域情報を生成する投写対象領域情報生成手段と、
前記第1の撮像情報と、前記第2の撮像情報との差異に基づき、前記撮像領域における前記第1の単色の領域を部分投写領域として検出し、当該部分投写領域に基づき、前記撮像領域における投写領域の4隅の座標を示す投写領域情報を生成する投写領域情報生成手段と、
前記投写対象領域情報と、前記投写領域情報とに基づき、画像歪み補正用情報を生成する補正用情報生成手段と、
前記画像歪み補正用情報に基づき、画像の歪みが補正されるように画像信号を補正する歪み補正手段と、
を含み、
前記画像投写手段は、前記歪み補正手段によって補正された画像信号に基づき、画像を投写することを特徴とする。
コンピュータを、
任意の単色で構成される単色キャリブレーション画像を投写対象物へ向け投写するとともに、画像全体の領域より小さい第1の単色の領域を含み、かつ、当該領域以外の領域が当該第1の単色以外の第2の単色で構成される複数色キャリブレーション画像を前記投写対象物へ向け投写する画像投写手段と、
前記投写対象物に投写された前記単色キャリブレーション画像を撮像して第1の撮像情報を生成するとともに、前記投写対象物に投写された前記複数色キャリブレーション画像を撮像して第2の撮像情報を生成する撮像手段と、
前記第1の撮像情報に基づく画素ごとの画像信号値の差異に基づき、前記撮像手段の撮像領域における前記投写対象物の4隅の座標を示す投写対象領域情報を生成する投写対象領域情報生成手段と、
前記第1の撮像情報と、前記第2の撮像情報との差異に基づき、前記撮像領域における前記第1の単色の領域を部分投写領域として検出し、当該部分投写領域に基づき、前記撮像領域における投写領域の4隅の座標を示す投写領域情報を生成する投写領域情報生成手段と、
前記投写対象領域情報と、前記投写領域情報とに基づき、画像歪み補正用情報を生成する補正用情報生成手段と、
前記画像歪み補正用情報に基づき、画像の歪みが補正されるように画像信号を補正する歪み補正手段として機能させ、
前記画像投写手段は、前記歪み補正手段によって補正された画像信号に基づき、画像を投写することを特徴とする。
上記プログラムを記憶したことを特徴とする。
前記投写対象物に投写された前記単色キャリブレーション画像を、撮像部を用いて撮像して第1の撮像情報を生成し、
画像全体の領域より小さい第1の単色の領域を含み、かつ、当該領域以外の領域が当該第1の単色以外の第2の単色で構成される複数色キャリブレーション画像を、前記画像投写部を用いて前記投写対象物へ向け投写し、
前記投写対象物に投写された前記複数色キャリブレーション画像を、前記撮像部を用いて撮像して第2の撮像情報を生成し、
前記第1の撮像情報に基づく画素ごとの画像信号値の差異に基づき、前記撮像部の撮像領域における前記投写対象物の4隅の座標を示す投写対象領域情報を生成し、
前記第1の撮像情報と、前記第2の撮像情報との差異に基づき、前記撮像領域における前記第1の単色の領域を部分投写領域として検出し、当該部分投写領域に基づき、前記撮像領域における投写領域の4隅の座標を示す投写領域情報を生成し、
前記投写対象領域情報と、前記投写領域情報とに基づき、画像歪み補正用情報を生成し、
前記画像歪み補正用情報に基づき、画像の歪みが補正されるように画像信号を補正し、
補正された画像信号に基づき、前記画像投写部を用いて画像を投写することを特徴とする。
前記投写領域情報生成手段は、前記部分投写領域をn倍した領域を前記投写領域として検出してもよい。
前記部分投写領域をn倍した領域を前記投写領域として検出してもよい。
前記投写対象領域情報に基づき、前記撮像領域の2次元平面に前記撮像手段の光軸を3次元目として加えた3次元空間における原点と、前記投写対象物の4隅との前記光軸上の相対距離を演算し、
前記投写対象領域情報と、前記相対距離とに基づき、前記投写対象物の4隅の前記3次元空間における座標を演算し、
当該座標に基づき、前記投写対象物の対向しない2辺の長さをそれぞれ演算することにより前記投写対象物の縦横比を示す第1の縦横比を演算し、
当該第1の縦横比と、前記単色キャリブレーション画像、前記複数色キャリブレーション画像または前記画像投写手段の有する投写用パネルの縦横比を示す第2の縦横比と、前記投写対象領域情報とに基づき、歪みのない状態であって、かつ、前記第2の縦横比で、前記画像投写手段が前記投写対象物に投写した場合の画像の4隅の前記撮像領域における座標を演算し、
当該画像の4隅の前記撮像領域における座標と、前記投写領域情報とに基づき、前記画像歪み補正用情報を生成してもよい。
前記投写対象領域情報と、前記相対距離とに基づき、前記投写対象物の4隅の前記3次元空間における座標を演算し、
当該座標に基づき、前記投写対象物の対向しない2辺の長さをそれぞれ演算することにより前記投写対象物の縦横比を示す第1の縦横比を演算し、
当該第1の縦横比と、前記単色キャリブレーション画像、前記複数色キャリブレーション画像または前記画像投写部の有する投写用パネルの縦横比を示す第2の縦横比と、前記投写対象領域情報とに基づき、歪みのない状態であって、かつ、前記第2の縦横比で、前記投写対象物に投写された場合の画像の4隅の前記撮像領域における座標を演算し、
当該画像の4隅の前記撮像領域における座標と、前記投写領域情報とに基づき、前記画像歪み補正用情報を生成してもよい。
前記キャリブレーション画像を撮像して撮像情報を生成する撮像手段と、
前記撮像情報に基づき、前記撮像手段の撮像領域における前記投写対象物の4隅の座標を示す投写対象領域情報を生成する投写対象領域情報生成手段と、
前記撮像情報に基づき、前記撮像領域における投写領域の4隅の座標を示す投写領域情報を生成する投写領域情報生成手段と、
前記投写対象領域情報と、前記投写領域情報とに基づき、画像歪み補正用情報を生成する補正用情報生成手段と、
前記画像歪み補正用情報に基づき、画像の歪みが補正されるように画像信号を補正する歪み補正手段と、
を含み、
前記画像投写手段は、前記歪み補正手段によって補正された画像信号に基づき、画像を投写し、
前記補正用情報生成手段は、前記投写対象領域情報に基づき、前記投写対象物の縦横比を示す第1の縦横比を把握し、当該第1の縦横比に応じて所望の縦横比を示す第2の縦横比で画像が表示されるように、前記投写領域情報に基づき、前記画像投写手段の有する投写用パネルにおける投写領域の4隅の座標を示す投写座標系投写領域情報を生成するとともに、当該投写座標系投写領域情報に基づき、前記画像歪み補正用情報を生成することを特徴とする。
コンピュータを、
キャリブレーション画像を投写対象物に向け投写する画像投写手段と、
前記キャリブレーション画像を撮像して撮像情報を生成する撮像手段と、
前記撮像情報に基づき、前記撮像手段の撮像領域における前記投写対象物の4隅の座標を示す投写対象領域情報を生成する投写対象領域情報生成手段と、
前記撮像情報に基づき、前記撮像領域における投写領域の4隅の座標を示す投写領域情報を生成する投写領域情報生成手段と、
前記投写対象領域情報と、前記投写領域情報とに基づき、前記投写対象領域に所望の縦横比で画像が投写されるように画像歪み補正用情報を生成する補正用情報生成手段と、
前記画像歪み補正用情報に基づき、画像の歪みが補正されるように画像信号を補正する歪み補正手段として機能させ、
前記画像投写手段は、前記歪み補正手段によって補正された画像信号に基づき、画像を投写し、
前記補正用情報生成手段は、前記投写対象領域情報に基づき、前記投写対象物の縦横比を示す第1の縦横比を把握し、当該第1の縦横比に応じて所望の縦横比を示す第2の縦横比で画像が表示されるように、前記投写領域情報に基づき、前記画像投写手段の有する投写用パネルにおける投写領域の4隅の座標を示す投写座標系投写領域情報を生成するとともに、当該投写座標系投写領域情報に基づき、前記画像歪み補正用情報を生成することを特徴とする。
前記キャリブレーション画像を撮像して撮像情報を生成し、
前記撮像情報に基づき、前記撮像手段の撮像領域における前記投写対象物の4隅の座標を示す投写対象領域情報を生成し、
前記撮像情報に基づき、前記撮像領域における投写領域の4隅の座標を示す投写領域情報を生成し、
前記投写領域情報に基づき、前記画像投写手段の有する投写用パネルにおける投写領域の4隅の座標を示す投写座標系投写領域情報を生成し、
前記投写座標系投写領域情報に基づき、前記投写対象物の縦横比を示す第1の縦横比を把握し、
前記第1の縦横比に応じて所望の縦横比を示す第2の縦横比で画像が投写されるように画像歪み補正用情報を生成し、
前記画像歪み補正用情報に基づき、画像の歪みが補正されるように画像信号を補正し、
補正した画像信号に基づき、画像を投写することを特徴とする。
当該第1の縦横比に応じて所望の縦横比を示す第2の縦横比で画像が表示されるように、前記投写領域情報に基づき、投写用パネルにおける投写領域の4隅の座標を示す投写座標系投写領域情報を生成し、
当該投写座標系投写領域情報に基づき、前記画像歪み補正用情報を生成してもよい。
前記投写対象領域情報に基づき、前記撮像領域の2次元平面に前記撮像手段の光軸を3次元目として加えた3次元空間における原点と、前記投写対象物の4隅との前記光軸上の相対距離を演算し、
前記投写対象領域情報と、前記相対距離とに基づき、前記投写対象物の4隅の前記3次元空間における座標を演算し、
当該座標に基づき、前記投写対象物の対向しない2辺の長さをそれぞれ演算することにより前記第1の縦横比を演算してもよい。
前記投写対象領域情報と、前記相対距離とに基づき、前記投写対象物の4隅の前記3次元空間における座標を演算し、
当該座標に基づき、前記投写対象物の対向しない2辺の長さをそれぞれ演算することにより前記第1の縦横比を演算してもよい。
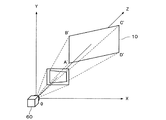
図1は、画像投写時の状態を示す模式図である。
次に、これらの各部を用いた画像処理の流れについて説明する。
u=s*((By-Dy)*(Ax-Dx)-(Bx-Dx)*(Ay-Dy))/((By-Dy)*(Dx-Cx)-(Bx-Dx)*(Dy-Cy))
v=s-t+u
また、ここで、sを例えば1(1以外でもよい。)と仮定することにより、原点からスクリーン10の4隅ABCDまでの光軸上(Z軸方向成分)の相対距離を得ることができる。
なお、本発明の適用は上述した実施例に限定されない。
次に、所定のアスペクト比で画像を投写するためのプロジェクタ20について説明する。
本発明は、上述した実施例に限定されず、種々の変形が可能である。
Claims (15)
- 任意の単色で構成される単色キャリブレーション画像を投写対象物へ向け投写するとともに、画像全体の領域より小さい第1の単色の領域を含み、かつ、当該領域以外の領域が当該第1の単色以外の第2の単色で構成される複数色キャリブレーション画像を前記投写対象物へ向け投写する画像投写手段と、
前記投写対象物に投写された前記単色キャリブレーション画像を撮像して第1の撮像情報を生成するとともに、前記投写対象物に投写された前記複数色キャリブレーション画像を撮像して第2の撮像情報を生成する撮像手段と、
前記第1の撮像情報に基づく画素ごとの画像信号値の差異に基づき、前記撮像手段の撮像領域における前記投写対象物の4隅の座標を示す投写対象領域情報を生成する投写対象領域情報生成手段と、
前記第1の撮像情報と、前記第2の撮像情報との差異に基づき、前記撮像領域における前記第1の単色の領域を部分投写領域として検出し、当該部分投写領域に基づき、前記撮像領域における投写領域の4隅の座標を示す投写領域情報を生成する投写領域情報生成手段と、
前記投写対象領域情報と、前記投写領域情報とに基づき、画像歪み補正用情報を生成する補正用情報生成手段と、
前記画像歪み補正用情報に基づき、画像の歪みが補正されるように画像信号を補正する歪み補正手段と、
を含み、
前記画像投写手段は、前記歪み補正手段によって補正された画像信号に基づき、画像を投写することを特徴とする画像処理システム。 - 請求項1において、
前記第1の単色の領域は、画像全体の領域をn分の1に縮小した領域であって、
前記投写領域情報生成手段は、前記部分投写領域をn倍した領域を前記投写領域として検出することを特徴とする画像処理システム。 - 請求項1、2のいずれかにおいて、
前記補正用情報生成手段は、
前記投写対象領域情報に基づき、前記撮像領域の2次元平面に前記撮像手段の光軸を3次元目として加えた3次元空間における原点と、前記投写対象物の4隅との前記光軸上の相対距離を演算し、
前記投写対象領域情報と、前記相対距離とに基づき、前記投写対象物の4隅の前記3次元空間における座標を演算し、
当該座標に基づき、前記投写対象物の対向しない2辺の長さをそれぞれ演算することにより前記投写対象物の縦横比を示す第1の縦横比を演算し、
当該第1の縦横比と、前記単色キャリブレーション画像、前記複数色キャリブレーション画像または前記画像投写手段の有する投写用パネルの縦横比を示す第2の縦横比と、前記投写対象領域情報とに基づき、歪みのない状態であって、かつ、前記第2の縦横比で、前記画像投写手段が前記投写対象物に投写した場合の画像の4隅の前記撮像領域における座標を演算し、
当該画像の4隅の前記撮像領域における座標と、前記投写領域情報とに基づき、前記画像歪み補正用情報を生成することを特徴とする画像処理システム。 - 請求項1において、
前記補正用情報生成手段は、前記投写対象領域情報に基づき、前記投写対象物の縦横比を示す第1の縦横比を把握し、当該第1の縦横比に応じて所望の縦横比を示す第2の縦横比で画像が表示されるように、前記投写領域情報に基づき、前記画像投写手段の有する投
写用パネルにおける投写領域の4隅の座標を示す投写座標系投写領域情報を生成するとともに、当該投写座標系投写領域情報に基づき、前記画像歪み補正用情報を生成することを特徴とする画像処理システム。 - 請求項4において、
前記補正用情報生成手段は、
前記投写対象領域情報に基づき、前記撮像領域の2次元平面に前記撮像手段の光軸を3次元目として加えた3次元空間における原点と、前記投写対象物の4隅との前記光軸上の相対距離を演算し、
前記投写対象領域情報と、前記相対距離とに基づき、前記投写対象物の4隅の前記3次元空間における座標を演算し、
当該座標に基づき、前記投写対象物の対向しない2辺の長さをそれぞれ演算することにより前記第1の縦横比を演算することを特徴とする画像処理システム。 - 請求項1〜5のいずれかにおいて、
前記投写対象領域情報生成手段は、前記撮像領域の中央付近から各画素を放射状に探索するように、前記撮像情報の画像信号値を探索し、探索中の当該画像信号値の差異に基づいて前記投写対象領域を把握して前記投写対象領域情報を生成することを特徴とする画像処理システム。 - 任意の単色で構成される単色キャリブレーション画像を投写対象物へ向け投写するとともに、画像全体の領域より小さい第1の単色の領域を含み、かつ、当該領域以外の領域が当該第1の単色以外の第2の単色で構成される複数色キャリブレーション画像を前記投写対象物へ向け投写する画像投写手段と、
前記投写対象物に投写された前記単色キャリブレーション画像を撮像して第1の撮像情報を生成するとともに、前記投写対象物に投写された前記複数色キャリブレーション画像を撮像して第2の撮像情報を生成する撮像手段と、
前記第1の撮像情報に基づく画素ごとの画像信号値の差異に基づき、前記撮像手段の撮像領域における前記投写対象物の4隅の座標を示す投写対象領域情報を生成する投写対象領域情報生成手段と、
前記第1の撮像情報と、前記第2の撮像情報との差異に基づき、前記撮像領域における前記第1の単色の領域を部分投写領域として検出し、当該部分投写領域に基づき、前記撮像領域における投写領域の4隅の座標を示す投写領域情報を生成する投写領域情報生成手段と、
前記投写対象領域情報と、前記投写領域情報とに基づき、画像歪み補正用情報を生成する補正用情報生成手段と、
前記画像歪み補正用情報に基づき、画像の歪みが補正されるように画像信号を補正する歪み補正手段と、
を含み、
前記画像投写手段は、前記歪み補正手段によって補正された画像信号に基づき、画像を投写することを特徴とするプロジェクタ。 - コンピュータにより読み取り可能なプログラムであって、
コンピュータを、
任意の単色で構成される単色キャリブレーション画像を投写対象物へ向け投写するとともに、画像全体の領域より小さい第1の単色の領域を含み、かつ、当該領域以外の領域が当該第1の単色以外の第2の単色で構成される複数色キャリブレーション画像を前記投写対象物へ向け投写する画像投写手段と、
前記投写対象物に投写された前記単色キャリブレーション画像を撮像して第1の撮像情報を生成するとともに、前記投写対象物に投写された前記複数色キャリブレーション画像を撮像して第2の撮像情報を生成する撮像手段と、
前記第1の撮像情報に基づく画素ごとの画像信号値の差異に基づき、前記撮像手段の撮像領域における前記投写対象物の4隅の座標を示す投写対象領域情報を生成する投写対象領域情報生成手段と、
前記第1の撮像情報と、前記第2の撮像情報との差異に基づき、前記撮像領域における前記第1の単色の領域を部分投写領域として検出し、当該部分投写領域に基づき、前記撮像領域における投写領域の4隅の座標を示す投写領域情報を生成する投写領域情報生成手段と、
前記投写対象領域情報と、前記投写領域情報とに基づき、画像歪み補正用情報を生成する補正用情報生成手段と、
前記画像歪み補正用情報に基づき、画像の歪みが補正されるように画像信号を補正する歪み補正手段として機能させ、
前記画像投写手段は、前記歪み補正手段によって補正された画像信号に基づき、画像を投写することを特徴とするプログラム。 - コンピュータにより読み取り可能なプログラムを記憶した情報記憶媒体であって、
請求項8に記載のプログラムを記憶したことを特徴とする情報記憶媒体。 - 任意の単色で構成される単色キャリブレーション画像を、画像投写部を用いて投写対象物へ向け投写し、
前記投写対象物に投写された前記単色キャリブレーション画像を、撮像部を用いて撮像して第1の撮像情報を生成し、
画像全体の領域より小さい第1の単色の領域を含み、かつ、当該領域以外の領域が当該第1の単色以外の第2の単色で構成される複数色キャリブレーション画像を、前記画像投写部を用いて前記投写対象物へ向け投写し、
前記投写対象物に投写された前記複数色キャリブレーション画像を、前記撮像部を用いて撮像して第2の撮像情報を生成し、
前記第1の撮像情報に基づく画素ごとの画像信号値の差異に基づき、前記撮像部の撮像領域における前記投写対象物の4隅の座標を示す投写対象領域情報を生成し、
前記第1の撮像情報と、前記第2の撮像情報との差異に基づき、前記撮像領域における前記第1の単色の領域を部分投写領域として検出し、当該部分投写領域に基づき、前記撮像領域における投写領域の4隅の座標を示す投写領域情報を生成し、
前記投写対象領域情報と、前記投写領域情報とに基づき、画像歪み補正用情報を生成し、
前記画像歪み補正用情報に基づき、画像の歪みが補正されるように画像信号を補正し、
補正された画像信号に基づき、前記画像投写部を用いて画像を投写することを特徴とする画像処理方法。 - 請求項10において、
前記第1の単色の領域は、画像全体の領域をn分の1に縮小した領域であって、
前記部分投写領域をn倍した領域を前記投写領域として検出することを特徴とする画像処理方法。 - 請求項10、11のいずれかにおいて、
前記投写対象領域情報に基づき、前記撮像領域の2次元平面に前記撮像部の光軸を3次元目として加えた3次元空間における原点と、前記投写対象物の4隅との前記光軸上の相対距離を演算し、
前記投写対象領域情報と、前記相対距離とに基づき、前記投写対象物の4隅の前記3次元空間における座標を演算し、
当該座標に基づき、前記投写対象物の対向しない2辺の長さをそれぞれ演算することにより前記投写対象物の縦横比を示す第1の縦横比を演算し、
当該第1の縦横比と、前記単色キャリブレーション画像、前記複数色キャリブレーション画像または前記画像投写部の有する投写用パネルの縦横比を示す第2の縦横比と、前記投写対象領域情報とに基づき、歪みのない状態であって、かつ、前記第2の縦横比で、前記投写対象物に投写された場合の画像の4隅の前記撮像領域における座標を演算し、
当該画像の4隅の前記撮像領域における座標と、前記投写領域情報とに基づき、前記画像歪み補正用情報を生成することを特徴とする画像処理方法。 - 請求項10において、
前記投写対象領域情報に基づき、前記投写対象物の縦横比を示す第1の縦横比を把握し、
当該第1の縦横比に応じて所望の縦横比を示す第2の縦横比で画像が表示されるように、前記投写領域情報に基づき、投写用パネルにおける投写領域の4隅の座標を示す投写座標系投写領域情報を生成し、
当該投写座標系投写領域情報に基づき、前記画像歪み補正用情報を生成することを特徴とする画像処理方法。 - 請求項13において、
前記投写対象領域情報に基づき、前記撮像領域の2次元平面に前記撮像部の光軸を3次元目として加えた3次元空間における原点と、前記投写対象物の4隅との前記光軸上の相対距離を演算し、
前記投写対象領域情報と、前記相対距離とに基づき、前記投写対象物の4隅の前記3次元空間における座標を演算し、
当該座標に基づき、前記投写対象物の対向しない2辺の長さをそれぞれ演算することにより前記第1の縦横比を演算することを特徴とする画像処理方法。 - 請求項10〜14のいずれかにおいて、
前記投写対象領域情報を生成する際に、前記撮像領域の中央付近から各画素を放射状に探索するように、前記撮像情報の画像信号値を探索し、探索中の当該画像信号値の差異に基づいて前記投写対象領域を把握して前記投写対象領域情報を生成することを特徴とする画像処理方法。
Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004078412A JP4150924B2 (ja) | 2003-07-02 | 2004-03-18 | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 |
| KR1020040049117A KR100660039B1 (ko) | 2003-07-02 | 2004-06-28 | 화상 처리 시스템, 프로젝터, 정보 기억 매체 및 화상처리 방법 |
| KR20-2004-0018384U KR200362482Y1 (ko) | 2003-07-02 | 2004-06-29 | 화상 처리 시스템 및 프로젝터 |
| US10/880,642 US7419268B2 (en) | 2003-07-02 | 2004-07-01 | Image processing system, projector, and image processing method |
| EP04253992.4A EP1494486B1 (en) | 2003-07-02 | 2004-07-01 | Image processing system, projector, information storage medium, and image processing method |
| TW093120038A TWI253006B (en) | 2003-07-02 | 2004-07-02 | Image processing system, projector, information storage medium, and image processing method |
| CNB2004100500795A CN100476572C (zh) | 2003-07-02 | 2004-07-02 | 图像处理系统、投影机以及图像处理方法 |
| US12/222,027 US7695143B2 (en) | 2000-03-18 | 2008-07-31 | Image processing system, projector, computer-readable medium, and image processing method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003270320 | 2003-07-02 | ||
| JP2004078412A JP4150924B2 (ja) | 2003-07-02 | 2004-03-18 | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008120274A Division JP4572377B2 (ja) | 2003-07-02 | 2008-05-02 | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005038388A JP2005038388A (ja) | 2005-02-10 |
| JP4150924B2 true JP4150924B2 (ja) | 2008-09-17 |
Family
ID=33436482
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004078412A Expired - Fee Related JP4150924B2 (ja) | 2000-03-18 | 2004-03-18 | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US7419268B2 (ja) |
| EP (1) | EP1494486B1 (ja) |
| JP (1) | JP4150924B2 (ja) |
| KR (2) | KR100660039B1 (ja) |
| CN (1) | CN100476572C (ja) |
| TW (1) | TWI253006B (ja) |
Families Citing this family (67)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3846592B2 (ja) * | 2003-06-26 | 2006-11-15 | セイコーエプソン株式会社 | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 |
| US7144115B2 (en) * | 2004-04-14 | 2006-12-05 | Sharp Laboratories Of America, Inc. | Projection system |
| EP1800496A1 (en) * | 2004-09-24 | 2007-06-27 | Tte Technology, Inc. | System and method for optical calibration of a picture modulator |
| JP2006121240A (ja) * | 2004-10-20 | 2006-05-11 | Sharp Corp | 画像投射方法、プロジェクタ、及びコンピュータプログラム |
| JP4232042B2 (ja) | 2005-01-07 | 2009-03-04 | セイコーエプソン株式会社 | 投写制御システム、プロジェクタ、プログラム、情報記憶媒体および投写制御方法 |
| JP3994290B2 (ja) | 2005-01-17 | 2007-10-17 | セイコーエプソン株式会社 | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 |
| JP4085283B2 (ja) * | 2005-02-14 | 2008-05-14 | セイコーエプソン株式会社 | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 |
| JP4380557B2 (ja) * | 2005-02-15 | 2009-12-09 | カシオ計算機株式会社 | プロジェクタ、チャート画像の表示方法及びプログラム |
| US20070115397A1 (en) * | 2005-06-24 | 2007-05-24 | Fakespace Labs, Inc. | Projection display with internal calibration bezel for video |
| JP2007036482A (ja) * | 2005-07-25 | 2007-02-08 | Nippon Telegr & Teleph Corp <Ntt> | 情報投影表示装置およびプログラム |
| US20070024764A1 (en) * | 2005-07-29 | 2007-02-01 | Optoma Technology, Inc. | Methods and systems that compensate for distortion introduced by anamorphic lenses in a video projector |
| US20070030452A1 (en) * | 2005-08-08 | 2007-02-08 | N-Lighten Technologies | Image adaptation system and method |
| JP2007078821A (ja) * | 2005-09-12 | 2007-03-29 | Casio Comput Co Ltd | 投影装置、投影方法及びプログラム |
| JP3953500B1 (ja) * | 2006-02-07 | 2007-08-08 | シャープ株式会社 | 画像投影方法及びプロジェクタ |
| KR100809351B1 (ko) * | 2006-04-03 | 2008-03-05 | 삼성전자주식회사 | 투사 영상을 보정하는 방법 및 장치 |
| JP4340923B2 (ja) | 2007-02-23 | 2009-10-07 | セイコーエプソン株式会社 | プロジェクタ、プログラムおよび情報記憶媒体 |
| DE102007027421A1 (de) * | 2007-06-14 | 2008-12-24 | Airbus Deutschland Gmbh | Bildanpassungsvorrichtung und -verfahren für eine Bildprojektion in einem Luftfahrzeug |
| JP4525945B2 (ja) * | 2007-08-07 | 2010-08-18 | セイコーエプソン株式会社 | 画像処理システム、プロジェクタ、プログラムおよび情報記憶媒体 |
| KR20090022053A (ko) * | 2007-08-29 | 2009-03-04 | 삼성전자주식회사 | 자동으로 영상을 조정하는 빔 프로젝트 장치 및 방법 |
| JP4692531B2 (ja) * | 2007-09-13 | 2011-06-01 | カシオ計算機株式会社 | 投影装置及び光測距方法。 |
| KR101537596B1 (ko) * | 2008-10-15 | 2015-07-20 | 엘지전자 주식회사 | 이동 단말기 및 이것의 터치 인식 방법 |
| KR101520689B1 (ko) * | 2008-10-22 | 2015-05-21 | 엘지전자 주식회사 | 이동 단말기 및 이를 이용한 화면 스크롤 방법 |
| JP5540493B2 (ja) * | 2008-10-30 | 2014-07-02 | セイコーエプソン株式会社 | 投写光学系に対する投写面の位置または傾きの測定方法、その測定方法を用いる投写画像の画像処理方法およびその画像処理方法を実行するプロジェクタ、投写光学系に対する投写面の位置または傾きを測定するプログラム |
| KR20100060428A (ko) * | 2008-11-27 | 2010-06-07 | 엘지전자 주식회사 | 영상 프로젝터를 구비한 이동 단말기 및 손떨림 보정 방법 |
| KR101527014B1 (ko) * | 2008-12-02 | 2015-06-09 | 엘지전자 주식회사 | 이동 단말기 및 이것의 디스플레이 제어 방법 |
| JP2010166360A (ja) * | 2009-01-16 | 2010-07-29 | Seiko Epson Corp | プロジェクタ、その制御方法、及びその制御プログラム |
| US8393740B2 (en) * | 2009-03-12 | 2013-03-12 | Canon Kabushiki Kaisha | Image projection system with keystone correction |
| JP2010243921A (ja) * | 2009-04-08 | 2010-10-28 | Sanyo Electric Co Ltd | 投写型映像表示装置 |
| US8400468B2 (en) * | 2009-08-27 | 2013-03-19 | Seiko Epson Corporation | Projector masks for calibrating projector-based display systems |
| KR20110071326A (ko) * | 2009-12-21 | 2011-06-29 | 삼성전자주식회사 | 프로젝터 기능의 휴대 단말기의 입력 키 출력 방법 및 장치 |
| TWI439788B (zh) * | 2010-01-04 | 2014-06-01 | Ind Tech Res Inst | 投影校正系統及方法 |
| JP5560721B2 (ja) * | 2010-01-12 | 2014-07-30 | セイコーエプソン株式会社 | 画像処理装置、画像表示システム、及び画像処理方法 |
| JP5560722B2 (ja) * | 2010-01-12 | 2014-07-30 | セイコーエプソン株式会社 | 画像処理装置、画像表示システム、および画像処理方法 |
| JP5560771B2 (ja) * | 2010-02-26 | 2014-07-30 | セイコーエプソン株式会社 | 画像補正装置、画像表示システム、画像補正方法 |
| KR101113679B1 (ko) | 2010-05-24 | 2012-02-14 | 기아자동차주식회사 | 카메라 시스템의 영상 보정 방법 |
| US8717389B2 (en) | 2010-08-06 | 2014-05-06 | Canon Kabushiki Kaisha | Projector array for multiple images |
| JP5541031B2 (ja) * | 2010-09-16 | 2014-07-09 | セイコーエプソン株式会社 | プロジェクター、およびプロジェクターの制御方法 |
| US8480238B2 (en) | 2010-10-26 | 2013-07-09 | Canon Kabushiki Kaisha | Projector array for multiple images |
| KR20140048073A (ko) | 2010-11-15 | 2014-04-23 | 스케일러블 디스플레이 테크놀로지스, 인크. | 수동 및 반자동 기법을 사용하여 디스플레이 시스템을 교정하는 시스템 및 방법 |
| JP5849522B2 (ja) * | 2011-08-18 | 2016-01-27 | 株式会社リコー | 画像処理装置、プロジェクタ、プロジェクタシステム、画像処理方法、そのプログラム、及び、そのプログラムを記録した記録媒体 |
| US10146795B2 (en) | 2012-01-12 | 2018-12-04 | Kofax, Inc. | Systems and methods for mobile image capture and processing |
| US11321772B2 (en) | 2012-01-12 | 2022-05-03 | Kofax, Inc. | Systems and methods for identification document processing and business workflow integration |
| US8855375B2 (en) | 2012-01-12 | 2014-10-07 | Kofax, Inc. | Systems and methods for mobile image capture and processing |
| US9652043B2 (en) * | 2012-05-14 | 2017-05-16 | Hewlett-Packard Development Company, L.P. | Recognizing commands with a depth sensor |
| US9134599B2 (en) | 2012-08-01 | 2015-09-15 | Pentair Water Pool And Spa, Inc. | Underwater image projection controller with boundary setting and image correction modules and interface and method of using same |
| TW201408057A (zh) * | 2012-08-10 | 2014-02-16 | Hon Hai Prec Ind Co Ltd | 手持設備及控制方法 |
| US20140281915A1 (en) * | 2013-03-12 | 2014-09-18 | Minds and Machines, LLC | Method and system for background generation using guides |
| US10127636B2 (en) | 2013-09-27 | 2018-11-13 | Kofax, Inc. | Content-based detection and three dimensional geometric reconstruction of objects in image and video data |
| US10783615B2 (en) * | 2013-03-13 | 2020-09-22 | Kofax, Inc. | Content-based object detection, 3D reconstruction, and data extraction from digital images |
| JP2015087639A (ja) * | 2013-10-31 | 2015-05-07 | 船井電機株式会社 | 軸ずれ検出装置、プロジェクタ装置及び軸ずれ検出方法 |
| JP2015126340A (ja) * | 2013-12-26 | 2015-07-06 | ソニー株式会社 | 画像処理方法並びに画像投影装置 |
| US9760788B2 (en) | 2014-10-30 | 2017-09-12 | Kofax, Inc. | Mobile document detection and orientation based on reference object characteristics |
| US10467465B2 (en) | 2015-07-20 | 2019-11-05 | Kofax, Inc. | Range and/or polarity-based thresholding for improved data extraction |
| US10242285B2 (en) | 2015-07-20 | 2019-03-26 | Kofax, Inc. | Iterative recognition-guided thresholding and data extraction |
| CN107547879B (zh) * | 2016-06-24 | 2019-12-24 | 上海顺久电子科技有限公司 | 一种投影成像的校正方法、装置及激光电视 |
| TWI586173B (zh) * | 2016-07-14 | 2017-06-01 | 張修誠 | 投影系統及投影影像的修正方法 |
| CN107621743B (zh) * | 2016-07-14 | 2020-04-24 | 北京宝江科技有限公司 | 投影系统及投影影像的变形修正方法 |
| TWI592020B (zh) * | 2016-08-23 | 2017-07-11 | 國立臺灣科技大學 | 投影機的影像校正方法及影像校正系統 |
| CN108628337A (zh) * | 2017-03-21 | 2018-10-09 | 株式会社东芝 | 路径生成装置、路径控制系统以及路径生成方法 |
| DE102017010741B4 (de) | 2017-11-21 | 2021-01-14 | Diehl Aerospace Gmbh | Verfahren zum Einrichten eines Projektors, Projektor und Passagierkabine |
| US10803350B2 (en) | 2017-11-30 | 2020-10-13 | Kofax, Inc. | Object detection and image cropping using a multi-detector approach |
| US10630948B2 (en) * | 2018-09-26 | 2020-04-21 | Christie Digital Systems Usa, Inc. | Device, system and method for photometric compensation of images provided by a display device |
| CN110319852B (zh) * | 2019-05-23 | 2021-06-22 | 上海机电工程研究所 | 基于三轴转台的屏幕投影式光学目标模拟系统校准方法 |
| JP7321947B2 (ja) * | 2020-01-20 | 2023-08-07 | 日立Astemo株式会社 | 画像補正装置及び画像補正方法 |
| CN114727075B (zh) * | 2021-01-06 | 2023-09-08 | 成都极米科技股份有限公司 | 投影控制方法和装置、投影设备及存储介质 |
| CN114845091B (zh) * | 2021-02-01 | 2023-11-10 | 扬智科技股份有限公司 | 投影装置与其梯形校正方法 |
| CN114157848B (zh) * | 2021-12-01 | 2024-07-23 | 深圳市火乐科技发展有限公司 | 投影设备校正方法、装置、存储介质以及投影设备 |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5933132A (en) * | 1989-11-07 | 1999-08-03 | Proxima Corporation | Method and apparatus for calibrating geometrically an optical computer input system |
| JPH1023473A (ja) | 1996-07-05 | 1998-01-23 | Toshiba Corp | カラー受像管のラスター歪検査方法およびラスター歪調整方法 |
| JP2000241874A (ja) | 1999-02-19 | 2000-09-08 | Nec Corp | プロジェクタの自動画面位置調整方法及び装置 |
| JP2001169211A (ja) * | 1999-12-06 | 2001-06-22 | Hitachi Ltd | 映像投影装置およびその歪補正方法 |
| KR100414083B1 (ko) * | 1999-12-18 | 2004-01-07 | 엘지전자 주식회사 | 영상왜곡 보정방법 및 이를 이용한 영상표시기기 |
| US6618076B1 (en) | 1999-12-23 | 2003-09-09 | Justsystem Corporation | Method and apparatus for calibrating projector-camera system |
| US6753907B1 (en) | 1999-12-23 | 2004-06-22 | Justsystem Corporation | Method and apparatus for automatic keystone correction |
| JP4961628B2 (ja) | 2000-08-11 | 2012-06-27 | 日本電気株式会社 | 投射映像補正システム及びその方法 |
| US6520647B2 (en) * | 2000-08-17 | 2003-02-18 | Mitsubishi Electric Research Laboratories Inc. | Automatic keystone correction for projectors with arbitrary orientation |
| JP2002247614A (ja) | 2001-02-15 | 2002-08-30 | Ricoh Co Ltd | プロゼェクタ |
| JP3761491B2 (ja) * | 2002-05-10 | 2006-03-29 | Necビューテクノロジー株式会社 | 投射映像の歪補正方法、歪補正プログラム及び投射型映像表示装置 |
| JP2004040395A (ja) | 2002-07-02 | 2004-02-05 | Fujitsu Ltd | 画像歪み補正装置、方法及びプログラム |
| JP2004260785A (ja) * | 2002-07-23 | 2004-09-16 | Nec Viewtechnology Ltd | 画像歪み補正機能を備えたプロジェクタ装置 |
| EP1385335B1 (en) * | 2002-07-23 | 2009-04-22 | NEC Display Solutions, Ltd. | Image projector with image-feedback control |
| KR100571219B1 (ko) * | 2003-01-08 | 2006-04-13 | 엘지전자 주식회사 | 3차원 가상 스크린 기반 영상왜곡 보정장치 |
| JP3844075B2 (ja) * | 2003-01-17 | 2006-11-08 | セイコーエプソン株式会社 | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 |
| JP2004274283A (ja) * | 2003-03-07 | 2004-09-30 | Casio Comput Co Ltd | 投影システム、及び投影装置、画像供給装置、プログラム |
| JP3690402B2 (ja) * | 2003-03-28 | 2005-08-31 | セイコーエプソン株式会社 | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 |
| CA2464569A1 (en) * | 2003-04-16 | 2004-10-16 | Universite De Montreal | Single or multi-projector for arbitrary surfaces without calibration nor reconstruction |
| JP3846592B2 (ja) * | 2003-06-26 | 2006-11-15 | セイコーエプソン株式会社 | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 |
| JP3630166B2 (ja) * | 2003-06-26 | 2005-03-16 | セイコーエプソン株式会社 | 投写画像の歪補正量調整 |
| JP4055010B2 (ja) * | 2003-09-26 | 2008-03-05 | セイコーエプソン株式会社 | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 |
| US7125122B2 (en) * | 2004-02-02 | 2006-10-24 | Sharp Laboratories Of America, Inc. | Projection system with corrective image transformation |
| JP4006601B2 (ja) * | 2004-03-29 | 2007-11-14 | セイコーエプソン株式会社 | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 |
| JP3882929B2 (ja) * | 2004-03-29 | 2007-02-21 | セイコーエプソン株式会社 | 画像処理システム、プロジェクタおよび画像処理方法 |
| JP3888465B2 (ja) * | 2004-05-26 | 2007-03-07 | セイコーエプソン株式会社 | 画像処理システム、プロジェクタおよび画像処理方法 |
| JP3994290B2 (ja) * | 2005-01-17 | 2007-10-17 | セイコーエプソン株式会社 | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 |
| JP4085283B2 (ja) * | 2005-02-14 | 2008-05-14 | セイコーエプソン株式会社 | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 |
| JP4126564B2 (ja) * | 2005-02-14 | 2008-07-30 | セイコーエプソン株式会社 | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 |
-
2004
- 2004-03-18 JP JP2004078412A patent/JP4150924B2/ja not_active Expired - Fee Related
- 2004-06-28 KR KR1020040049117A patent/KR100660039B1/ko active IP Right Grant
- 2004-06-29 KR KR20-2004-0018384U patent/KR200362482Y1/ko not_active IP Right Cessation
- 2004-07-01 US US10/880,642 patent/US7419268B2/en not_active Expired - Fee Related
- 2004-07-01 EP EP04253992.4A patent/EP1494486B1/en not_active Expired - Lifetime
- 2004-07-02 TW TW093120038A patent/TWI253006B/zh not_active IP Right Cessation
- 2004-07-02 CN CNB2004100500795A patent/CN100476572C/zh not_active Expired - Fee Related
-
2008
- 2008-07-31 US US12/222,027 patent/US7695143B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| KR200362482Y1 (ko) | 2004-09-18 |
| US20080291402A1 (en) | 2008-11-27 |
| EP1494486A2 (en) | 2005-01-05 |
| EP1494486B1 (en) | 2014-04-16 |
| TWI253006B (en) | 2006-04-11 |
| KR100660039B1 (ko) | 2006-12-20 |
| US7419268B2 (en) | 2008-09-02 |
| KR20050004025A (ko) | 2005-01-12 |
| US7695143B2 (en) | 2010-04-13 |
| US20050041216A1 (en) | 2005-02-24 |
| JP2005038388A (ja) | 2005-02-10 |
| TW200515265A (en) | 2005-05-01 |
| CN1577051A (zh) | 2005-02-09 |
| CN100476572C (zh) | 2009-04-08 |
| EP1494486A3 (en) | 2006-03-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4150924B2 (ja) | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 | |
| JP4572377B2 (ja) | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 | |
| KR100648592B1 (ko) | 화상 처리 시스템, 프로젝터 및 화상 처리 방법 | |
| JP4006601B2 (ja) | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 | |
| JP3879858B2 (ja) | 画像処理システム、プロジェクタおよび画像処理方法 | |
| KR100591708B1 (ko) | 화상 처리 시스템, 프로젝터 및 화상 처리 방법 | |
| JP5266954B2 (ja) | 投写型表示装置および表示方法 | |
| JP5266953B2 (ja) | 投写型表示装置および表示方法 | |
| JP3871061B2 (ja) | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 | |
| JP3925521B2 (ja) | スクリーンの一部の辺を用いたキーストーン補正 | |
| JP5239611B2 (ja) | 投写型表示装置および画像の補正方法 | |
| JP2008211355A (ja) | プロジェクタ、プログラムおよび情報記憶媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050314 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20051221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080305 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080502 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080604 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080617 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4150924 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110711 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110711 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120711 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120711 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130711 Year of fee payment: 5 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |