JP4100764B2 - 車両のホイールアライメント測定装置 - Google Patents
車両のホイールアライメント測定装置 Download PDFInfo
- Publication number
- JP4100764B2 JP4100764B2 JP16478398A JP16478398A JP4100764B2 JP 4100764 B2 JP4100764 B2 JP 4100764B2 JP 16478398 A JP16478398 A JP 16478398A JP 16478398 A JP16478398 A JP 16478398A JP 4100764 B2 JP4100764 B2 JP 4100764B2
- Authority
- JP
- Japan
- Prior art keywords
- wheel
- wheels
- tester
- roller
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000005259 measurement Methods 0.000 claims description 26
- 230000000452 restraining effect Effects 0.000 claims description 2
- 238000006073 displacement reaction Methods 0.000 description 5
- 230000036544 posture Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000010276 construction Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/10—Wheel alignment
- G01B2210/22—Wheels in a state of motion supported on rollers, rotating platform or other structure substantially capable of only one degree of rotational freedom
Landscapes
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Description
【発明の属する技術分野】
本発明はダイナミック測定に好適で、大掛かりで高価な設備と専用の作業スペースを要することなく、確実かつ精密に車両をテスターに正対させ、アライメント測定の信頼性を得られるようにした車両のホイールアライメント測定装置に関する。
【0002】
【従来の技術】
従来のこの種の装置は、例えば特許第2622600号公報のように、左右一対の移動台板と、該移動台板上に取り付けられ、かつ車輪を支持する一対のローラを設けた左右一対の支持台と備え、これら移動台板と支持台とをパンタグラフ機構の接離手段を介して車幅方向に移動可能に設けるとともに、支持台入口側の移動台板上に一対のガイドローラを車両の進入方向に間隔を狭めて配置し、車両が片側にずれて、または斜めに進入した場合でも、車両のセンターラインと測定基準線との合致を容易かつ自動的に行なえるようにしている。
【0003】
また、特開平6−331505号公報には、一対のローラ上に車輪を回転支持する車輪駆動機構と、修正輪をタイヤの側方から押圧して車両をアライメントテスターに正しい向きに矯正する車両正対機構と、超音波センサを備えたホイールアライメントテスターと、マイクロコンピュータを内臓した制御盤と、計測値を出力する車両姿勢計測器とを備え、車輪をローラ上に支持し、車両をアライメントテスターに正しい向きに矯正後、各車輪のホイールアライメントを測定し、そのデータを出力するようにしている。
【0004】
しかし、前者の装置は、試験場の専用スペースに一対の移動台板と支持台とを設置し、これらを各接離手段を介して車幅方向に移動可能にしているため、専用の作業スペースや大掛かりな設備を要し、また後者の装置は専用の作業スペースにピットを付設し、該ピット内に大型の架台を設置する等して、大掛かりな設備を要し、共に設備が大形かつ複雑で高価になるという問題があった。
また、後者の装置の車両正対機構は、大形かつ複雑なリンク機構を要するため、車両の正対精度に不安があり、アライメント測定に十分な信頼性を得られなかった。
【0005】
【発明が解決しようとする課題】
本発明はこのような問題を解決し、ダイナミック測定に好適で、大掛かりで高価な設備と専用の作業スペースを要することなく、正確かつ精密に車両をテスターに正対させ、アライメント測定の信頼性を得られるようにした車両のホイールアライメント測定装置を提供することを目的とする。
【0006】
【課題を解決するための手段】
このため、請求項1の発明は、左右前後輪に対応する数のテスターユニットを備え、該ユニットは少なくとも車輪を回転可能に載置可能な少なくとも一対のローラと、車輪の外側面に係脱可能なアタッチプレートと、車輪の外側面に近接離反動可能に設置されて前記外側面を押圧可能な押圧ローラと、該ローラと同動して車輪に係合したアタッチプレートとの距離を計測可能な複数の距離センサを備えたセンサーホルダと、前記距離センサからの計測信号を入力されて演算可能な演算器とを有する車両のホイールアライメント測定装置において、回転下のローラ上の左右一対の前輪または後輪の一方を前記押圧ローラを介して拘束するとともに、回転下のローラ上の他方の左右一対の前輪または後輪を押圧ローラを介して対応するテスターユニットに正対させ、前記距離センサを介し前軸アクスルの中心位置と後軸アクスルの中心位置とを演算し、これら前後軸アクスルの中心位置を比較し、これらの中心位置が同一になるまで押圧ローラを作動し、前記前輪または後輪の正対作動を続行させる一方、これらの中心位置が同一になった際、前記距離センサによるアライメント測定を実行可能にし、ダイナミック測定に好適で、正確かつ精密に車両をテスターに正対させ、アライメント測定の信頼性を得られるようにしている。
請求項2の発明は、各テスターユニットを作業床面に取り外し可能に設置し、従来のような大掛かりで高価な設備と専用の作業スペースを要することなく、設備できるようにしている。
請求項3の発明は、アタッチプレートを車輪の外側面に着脱自在に装着し、これをセンサホルダに一体に構成した従来のものに比べて、構成を簡単にし、その製作と取り扱いを容易に行なえるようにしている。
【0007】
【発明の実施の形態】
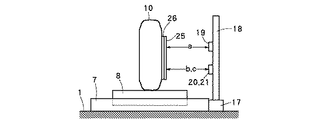
以下、本発明の実施の形態を図面により説明すると、図1乃至図6において1は自動車整備工場等の平坦な作業床面で、該床面1上にアライメントテスター2が取り外し可能に設置されている。
【0008】
アライメントテスター2は、実質的に同一に構成した4つのテスターユニット3,4,5,6を有し、これらのユニット3〜6を作業床面1の所定位置に配置している。
上記テスターユニット3〜6は、作業床面1上に取り外し可能な架台7を備え、該台7に一対のローラ8,8を回転自在に支持し、このローラ8,8上に被験車両9の左右の前後輪10,11,12,13を回転可能に支持している。
【0009】
上記各一対のローラ8は、その一方を駆動側に構成し、その駆動側ローラ8を例えばプーリ14とベルト15を介してモータ16に連係している。
上記モータ16は架台7若しくはその延設部に一体的に設置され、架台7と共に作業床面1に取り外し可能に設置されている。
【0010】
前記架台7の外端部にセンサーフレーム17が固定され、該フレーム17にセンサーホルダ18が立設されている。
センサーホルダ18は、後述のアタッチプレートと同大若しくはそれ以上の板体で構成され、該ホルダ18に距離センサである3つの変位センサ19,20,21、実施形態ではレーザー変位センサが同心円上の等角度位置に配置され、それらからアタッチプレートまでの距離を計測し、その信号を後述の演算器へ入力可能にしている。
【0011】
センサーフレーム17の中央に流体圧シリンダ等のアクチュエ-タ22が設けられ、そのピストンロッド23を車輪10〜13の下部側へ伸縮可能に配置している。
ピストンロッド23の先端部に押圧ローラ24が回転自在に支持され、該ローラ24をピストンロッド23の伸長時、車輪10〜13の下部側面に当接可能に配置している。
【0012】
車輪10〜13の外側面にアタッチプレート25が取付けられ、該プレート25は図5のようにホイール26よりも小径の円板で構成され、その内側面の中央にハブ27と嵌合可能な円管状のハブケース28が突設されている。
図中、29はアタッチプレート25の内側面に一端を固定した取付バネで、この他端のフック部30をホイール26の孔31または溝に掛け止め、前記プレート25を車輪10〜13に取付け可能にしている。
【0013】
この他、図中32は前軸アクスル、33は後軸アクスル、34はマイクロコンピュータ等を内臓した演算器で、前記変位センサ19〜21による計測信号によって、各車輪10〜13のトー値およびキャンバ値等のアライメントを演算可能にされ、その結果をCRTおよびプリンタ35に出力可能にしている。
【0014】
演算器34は図6のフローによる正対制御を介して、上記アライメントの測定ないし演算を可能にされている。
すなわち、演算器34は、アライメントテスター2上の被験車両9に対し、先ず前輪10,11または後輪12,13の一方、実施形態では前輪10,11側のテスターユニット3,4の押圧ローラ24,24によって、ローラ8,8上の前輪10,11を固定する。
【0015】
次に非拘束側の後輪12,13側のテスターユニット3,4の押圧ローラ24,24によって、ローラ8,8上の後輪12,13の姿勢を矯正し、被験車両9を各テスターユニット3〜6に正対させる。
その間、演算器34は各テスターユニット3〜6の変位センサ19〜21による入力信号によって、前軸アクスル32の中心位置Lf と、後軸アクスル33の中心位置Lr を演算し、その大小を比較する。
【0016】
そして、Lf =Lr になったところで、演算器34は被験車両9の正対完了を判断し、次のアライメント測定へ移行する。
一方、Lf ≠Lr の場合は、演算器34は前記押圧ローラ24,24による後輪12,13の姿勢の矯正動作を続行させ、Lf =Lr になったところで被験車両9の正対完了を判断し、アライメント測定へ移行する。
【0017】
この他、図中36は各テスターユニット3,4,5,6の片側に設置したステップである。
【0018】
このように構成したアライメントテスター2は、各テスターユニット3,4,5,6の取付け基部を構成する架台7、モータ16、センサーフレーム17等を作業床面1上に取外し可能にしたから、不使用時は上記各部材を取り外して所定位置に保管することができ、そのようにすることで作業床面1が開放され、その有効利用が可能になる。
【0019】
この場合、上記部材を一体的に構成しているから、それらの取り外しや取り付けを各テスターユニット3,4,5,6毎に行なえ、アライメントテスター2の撤去や設置を能率良く行なえる。
【0020】
しかも、本発明は作業床面1にピットの付設を要しないから、これを容易かつ安価に製作することができ、したがって従来のような専用の作業スペースを要せず、一定の広さの作業床面1を確保すれば所期の利用が可能になる。
【0021】
また、本発明は各テスターユニット3〜6毎に分割して構成しているから、これらを一体的に構成したものに比べて、大掛かりにならずに済み、コンパクトで取り扱いが至便になり、大掛かりにならずに済む。
【0022】
次にアライメントテスター2を使用する場合は、各テスターユニット3〜6を搬入し、これを作業床面1の所定位置に取り付ける。
すなわち、各テスターユニット3〜6を、被験車両9の前後左右の車輪10〜13の間隔に合わせて配置し、これを例えばボルト・ナットを駆使して取り付ける。
この場合、各テスターユニット3〜6の架台7、モータ16、センサーフレーム17等を一体的に構成しているから、それらの設置を簡易かつ迅速に行なえる
【0023】
この後、被験車両9を入場し、ステップ36を介して車輪10〜13を各テスターユニット3〜6のローラ8,8上に乗り上げ、静止させる。
この場合、被験車両9の停止位置によって、車輪10〜13は各テスターユニット3〜6ないしセンサーホルダ18に正対していない。
【0024】
そこで、アタッチプレート25を用意し、これを車輪10〜13のホイール26側面に取り付ける。その際、ハブケース28をハブ27に嵌合し、取付バネ30の先端のフック部30をホイール26の孔31または溝に掛け止め、アタッチプレート25を車輪10〜13に取付ける。
【0025】
このようにすることで、アタッチプレート25は簡単に取り付けられ、ハブケース28によってセンタリングされるとともに、取付バネ30の弾性によってホイール26の側面に密着し、略垂直に取付けられる。
【0026】
このような状況の下で各テスターユニット3〜6のモータ16を駆動し、駆動側のローラ8を回転して、各車輪10〜13を回転するとともに、演算器34が図6に示す正対制御を開始する。
【0027】
すなわち、前後輪の一方、実施形態では前輪10,11に対応するテスターユニット3,4のアクチュエータ22を作動し、そのピストンロッド23を伸長して、押圧ローラ24を前輪10,11の下部側面に押し付け、該前輪10,11をローラ8,8の軸方向、つまり上記車輪10,11の偏位方向と反対方向へ押し動かし、その略中央位置で固定ないし拘束する。
【0028】
前輪10,11を拘束後、後輪12,13に対応するテスターユニット5,6のアクチュエータ22を作動し、そのピストンロッド23を伸長して、押圧ローラ24を後輪12,13の下部側面に押し付け、該後輪12,13をローラ8,8の軸方向、つまり上記車輪12,13の偏位方向と反対方向へ押し動かすとともに、その姿勢を矯正し、該車輪12,13の正対を促す。
【0029】
一方、上記アクチュエータ22の作動と前後して、各テスターユニット3〜6の変位センサ19〜21を作動し、該センサ19〜21から各アタッチプレート25の対応位置、つまり照射位置A,B,Cまでの距離a,b,cを測定し、その信号を演算器34へ入力する。
【0030】
演算器34は上記距離信号a,b,cのうち、ホイールセンターの中心位置Pに関する演算情報、つまり距離信号a,cを基に上記中心位置P、換言すれば各アクチュエータ22から各アタッチプレート25の中心位置までの距離を演算する。
【0031】
すなわち、演算器34は、上記ホイールセンターの中心位置PをP=(a+c)/2で演算する。このうち、各アクチュエータ22から左右の前輪10,11の中心位置までの距離をPL ,PR 、左右の後輪12,13の中心位置までの距離をPL' ,PR'とする。
【0032】
そして、これらの数値を基に演算器34は前軸アクスル32の中心位置Lf と、後軸アクスル33の中心位置Lr を演算する。
すなわち、前軸アクスル32の中心位置Lf をLf =PL +{L−(PL +PR )}/2、後軸アクスル33の中心位置Lr をLr =PL' +{L−(PL'+PR')}/2として、それぞれ演算し、それらの大小を比較する。ここにLは左右のアクチュエータ22,22の中心間距離である。
【0033】
演算器34はLf =Lr となるまで、アクチュエータ22の伸長作動を続行して、前輪10,11の拘束と後輪12,13の正対矯正動作を続行し、Lf =Lr になったところで、左右の前後輪10〜13と対応するテスターユニット3〜6との正対を判断する。
【0034】
この後、演算器34は前記正対状態の下でアライメント測定を指示する。
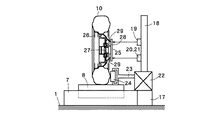
アライメント測定は、トー角θt およびキャンバー角θc を測定することで行われる。
すなわち、図2,3においてトー角θt は、θt =tan-1{(b−c)/d}、キャンバー角θc は、θc =tan-1{(a−b)/d}で表される。
【0035】
この場合、(b−c)/dおよび(a−b)/dは微小であるから、θtは略(b−c)/d、θcは略(a−b)/dで表される。ここにtan-1はアークタンジェント、dは、前記対応位置AとBとの中心距離、または対応位置BとCとの中心距離である。
【0036】
演算器34は、上記計測値a、b、c、dの入力を条件に前記演算式の記憶情報に基いて、トー角θt およびキャンバー角θc を演算し、その測定値を演算器34のCRT若しくはプリンター35へ出力する。
この他、演算器34は前述と同じ要領で後輪12,13に関する距離情報を基にトー角θを演算すれば、スラスト角を求めることができる。
【0037】
一方、上記アライメント測定後、アクチュエータ22を縮小作動し、押圧ローラ24を車輪10〜13から後退して、該ローラ24による拘束を解除し、各車輪10〜13の回転を続行させる。
【0038】
このような状況の下で被験車両9に試験員が乗車し、ハンドルを直進状態にセットして自由走行させ、その際の被験車両9のローラ8上における左右方向のずれ、つまり車両の片流れの有無とその度合い、並びにハンドルの保舵力のフィーリングをチェックする。
【0039】
このように本発明は、アライメント測定から簡単に自由走行試験に移行でき、アライメント測定の他に車両の片流れやハンドルの保舵力のフィーリング等をチェックできる。
【0040】
図7および図8は本発明の他の実施形態を示し、前述の実施形態と対応する構成部分には同一の符号を用いている。
この実施形態は前後輪10〜13の何れか一方、実施形態では前輪10,11側のテスターユニット3,4を、ガイドレール37,37に沿って互いに移動可能にするとともに、ベアリング38を介して架台7をターンテーブルのように、水平面と平行に揺動自在に支持している。図中、39はキングピンである。
【0041】
このようにすることで、前輪10,11のキャスタ角度の差によって生ずるセットバックに応じて、テスターユニット3,4が揺動するとともに、ガイドレール37に沿って前後方向へ移動し、それらの程度によって上記セットバックの度合いをチェックできる。
また、テスターユニット3,4の回転によって、キングピン39の傾斜角やキャスタ角も測定可能になる。
【0042】
【発明の効果】
請求項1の発明は、回転下のローラ上の左右一対の前輪または後輪の一方を前記押圧ローラを介して拘束するとともに、回転下のローラ上の他方の左右一対の前輪または後輪を押圧ローラを介して対応するテスターユニットに正対させ、前記距離センサを介し前軸アクスルの中心位置と後軸アクスルの中心位置とを演算し、これら前後軸アクスルの中心位置を比較し、これらの中心位置が同一になるまで押圧ローラを作動し、前記前輪または後輪の正対作動を続行させる一方、これらの中心位置が同一になった際、前記距離センサによるアライメント測定を実行可能にしたから、ダイナミック測定に好適で、正確かつ精密に車両をテスターに正対させ、アライメント測定の信頼性を向上することができる。
請求項2の発明は、各テスターユニットを作業床面に取り外し可能に設置したから、従来のように大掛かりで高価な設備と専用の作業スペースを要することなく、設備できる効果がある。
請求項3の発明は、アタッチプレートを車輪の外側面に着脱自在に装着したから、これをセンサホルダに一体に構成した従来のものに比べて、構成を簡単にし、その製作と取り扱いを容易に行なうことができる。
【図面の簡単な説明】
【図1】本発明の実施の形態の概要を示す説明図である。
【図2】本発明によるアライメント測定状況の要部を示す正面図である。
【図3】図2の側面図である。
【図4】図3の部分断面図である。
【図5】本発明に適用したアタッチプレートの一例を示す斜視図である。
【図6】本発明による正対制御を示すフローチャートである。
【図7】本発明の他の実施形態の要部を示す平面図である。
【図8】図7の要部を示す正面図である。
【符号の説明】
1 作業床面
3〜6 テスターユニット
8 ローラ
10,11 前輪
12,13 後輪
18 センサーホルダ
19,20,21 距離センサ
24 押圧ローラ
25 アタッチプレート
32 前軸アクスル
33 後軸アクスル
34 演算器
Claims (3)
- 左右前後輪に対応する数のテスターユニットを備え、該ユニットは少なくとも車輪を回転可能に載置可能な少なくとも一対のローラと、車輪の外側面に係脱可能なアタッチプレートと、車輪の外側面に近接離反動可能に設置されて前記外側面を押圧可能な押圧ローラと、該ローラと同動して車輪に係合したアタッチプレートとの距離を計測可能な複数の距離センサを備えたセンサーホルダと、前記距離センサからの計測信号を入力されて演算可能な演算器とを有する車両のホイールアライメント測定装置において、回転下のローラ上の左右一対の前輪または後輪の一方を前記押圧ローラを介して拘束するとともに、回転下のローラ上の他方の左右一対の前輪または後輪を押圧ローラを介して対応するテスターユニットに正対させ、前記距離センサを介し前軸アクスルの中心位置と後軸アクスルの中心位置とを演算し、これら前後軸アクスルの中心位置を比較し、これらの中心位置が同一になるまで押圧ローラを作動し、前記前輪または後輪の正対作動を続行させる一方、これらの中心位置が同一になった際、前記距離センサによるアライメント測定を実行可能にした車両のホイールアライメント測定装置。
- 各テスターユニットを作業床面に取り外し可能に設置した請求項1記載の車両のホイールアライメント測定装置。
- 前記アタッチプレートを車輪の外側面に着脱自在に装着した請求項1記載の車両のホイールアライメント測定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP16478398A JP4100764B2 (ja) | 1998-06-12 | 1998-06-12 | 車両のホイールアライメント測定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP16478398A JP4100764B2 (ja) | 1998-06-12 | 1998-06-12 | 車両のホイールアライメント測定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH11352023A JPH11352023A (ja) | 1999-12-24 |
| JP4100764B2 true JP4100764B2 (ja) | 2008-06-11 |
Family
ID=15799874
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP16478398A Expired - Fee Related JP4100764B2 (ja) | 1998-06-12 | 1998-06-12 | 車両のホイールアライメント測定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4100764B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5894318B1 (ja) * | 2015-06-16 | 2016-03-23 | 有限会社島田自動車工業 | ホイールアライメントの検査方法 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100680712B1 (ko) | 2005-05-23 | 2007-02-08 | 현대자동차주식회사 | 케이블을 이용한 차량의 센터링 장치 |
| JP2024016580A (ja) * | 2022-07-26 | 2024-02-07 | ダイハツ工業株式会社 | 車両の走行試験装置 |
-
1998
- 1998-06-12 JP JP16478398A patent/JP4100764B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5894318B1 (ja) * | 2015-06-16 | 2016-03-23 | 有限会社島田自動車工業 | ホイールアライメントの検査方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPH11352023A (ja) | 1999-12-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110720032B (zh) | 用于机动车的测功机测试的方法和系统 | |
| CN102770738B (zh) | 用于车辆的车轮定位的方法和系统 | |
| US4567667A (en) | Method and apparatus for measuring the inclination of the wheels of an automobile | |
| JP2024057101A (ja) | 変換テーブル作成方法 | |
| CN104792555B (zh) | 汽车前束测量装置和使用该装置的汽车前束测量方法 | |
| JP4100764B2 (ja) | 車両のホイールアライメント測定装置 | |
| EP0685724A1 (en) | Car stability measuring equipment and stability regulation method | |
| JP2009222582A (ja) | シャシーダイナモメータ | |
| JP2880607B2 (ja) | ホイールアライメント測定装置 | |
| JP2000111454A (ja) | 車両挙動の不具合評価装置 | |
| JP3630123B2 (ja) | 駐車支援装置の車両適合方法 | |
| JPH0295233A (ja) | ホイールの動釣合い試験機 | |
| JP4530959B2 (ja) | ホイ−ルアライメント測定方法およびその測定装置 | |
| JP2622600B2 (ja) | 車両複合試験装置 | |
| JP2835682B2 (ja) | ホイールアライメント測定装置 | |
| US3494045A (en) | Method and apparatus for determining caster trail | |
| JP4007360B2 (ja) | 駐車支援装置 | |
| JP2801244B2 (ja) | 車輌サスペンション特性測定方法 | |
| CN114061968B (zh) | 底盘测功机以及转换表制作方法 | |
| JP2000121504A (ja) | ホイールアライメント測定装置 | |
| JPH06123620A (ja) | ホイールアライメント測定装置 | |
| JP3497261B2 (ja) | 車両のスタビリティ調整方法 | |
| JPH045938B2 (ja) | ||
| JPH0694581A (ja) | ホイールアライメント測定調整装置 | |
| JP4940194B2 (ja) | 軌道走行台車の走行試験装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050426 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20061121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080304 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080318 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110328 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |