JP4046545B2 - 手術用顕微鏡 - Google Patents
手術用顕微鏡 Download PDFInfo
- Publication number
- JP4046545B2 JP4046545B2 JP2002127247A JP2002127247A JP4046545B2 JP 4046545 B2 JP4046545 B2 JP 4046545B2 JP 2002127247 A JP2002127247 A JP 2002127247A JP 2002127247 A JP2002127247 A JP 2002127247A JP 4046545 B2 JP4046545 B2 JP 4046545B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- photographing
- stereoscopic image
- display
- photographing means
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 claims description 37
- 238000003384 imaging method Methods 0.000 claims description 26
- 230000002194 synthesizing effect Effects 0.000 claims description 14
- 230000015572 biosynthetic process Effects 0.000 claims description 3
- 238000003786 synthesis reaction Methods 0.000 claims description 3
- 230000003287 optical effect Effects 0.000 description 15
- 238000010586 diagram Methods 0.000 description 12
- 238000001356 surgical procedure Methods 0.000 description 9
- 238000012937 correction Methods 0.000 description 8
- 239000000203 mixture Substances 0.000 description 6
- 239000002131 composite material Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000003780 insertion Methods 0.000 description 2
- 230000037431 insertion Effects 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 208000003464 asthenopia Diseases 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000002406 microsurgery Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images

















Landscapes
- Microscoopes, Condenser (AREA)
- Testing, Inspecting, Measuring Of Stereoscopic Televisions And Televisions (AREA)
Description
【発明の属する技術分野】
この発明は、特に脳神経外科等で微細部位の手術に使用される手術用顕微鏡に関する。
【0002】
【従来の技術】
従来、脳神経外科領域では、より微細な手術を確実に行うために、術部を立体で拡大観察する手術用顕微鏡が多く利用されている。さらに、近年では手術を確実に行なうため、手術用顕微鏡観察下のみで行なっていた従来の手術に、内視鏡観察が併用されており、手術用顕微鏡観察像と内視鏡観撮像とを手術用顕微鏡視野内で同時に観察できることが望まれている。
【0003】
従来技術としては、例えば、特開平5−323199号公報、特願平11−330188が知られている。これらは、術部の画像を立体撮像手段により電子画像化し、電子画像化された立体映像をLCD等に表示する。表示された立体電子画像を術者が観察するようになっている。
【0004】
また、特開平8−194189号公報のものは、対象物を撮影するための撮像手段と、撮像手段を操作するための操作盤が設けられている。操作者は、操作盤を操作することにより、撮像手段を移動させ、所望の対象物を撮影する。撮影された映像は操作者が装着しているHMD(ヘッドマウントディスプレイ)に映し出され、対象物を観察する。撮像手段は、対象物までの距離を測定し、距離データをCPUで演算する。撮影された映像を遠近感があるように表示するために、HMDに配置された光学系の移動等を行い画像の虚像位置を変更する。
【0005】
さらに、特開平6−230289号公報に示すように、鏡体の向きに合わせてフットスイッチを制御する例がある。観察方向を変更するために、術者は鏡体の向きを変更させる。この時に鏡体の向きが変更された量を検出する。その変更分に応じてフットスイッチのXY制御スイッチを回転させる。これにより、鏡体の観察方向を変更した場合に、フットスイッチの操作方向を鏡体の向きに合わせることができるため、フットスイッチを設置し直すことなく、術者から見た前後左右方向と一致した方向に鏡体を移動させることができる。
【0006】
【発明が解決しようとする課題】
しかしながら、前述した特開平5−323199号公報に記載された方法で、術部を電子画像で表示すると、観察光学系の焦点距離や観察倍率を変更しても、虚像位置は変化しないため、術者は距離が変更されたようには見えず、遠近感がつかみにくい。マイクロサージャリーのような微細な作業が必要な手術では遠近感をつかめることが術者にとって最も重要である。
【0007】
また、特開平8−194189号公報においては、操作者が遠近感をつかめるように、撮影距離に応じて、HMDの光学系を制御し、虚像位置を変化させることで観察対象物をつかみやすくしているが、手術用顕微鏡を用いた手術においては、焦点距離を変更するのみではなく、様々な操作がなされる。例えば、フォーカス、ズーム操作、観察位置移動操作、観察方向の移動操作を頻繁に繰り返す。さらに、術部の処置、観察のために、術具や内視鏡が挿入される。微細な手術をする際には、上述の操作に連動して、電子画像表示手段の虚像位置を変化させることで、遠近感をつかみ易くすることが望まれる。
【0008】
この発明は、前記事情に着目してなされたもので、その目的とするところは、観察光学系の操作や術具、内視鏡の挿入に合わせて、術者が術部の遠近感を確実に把握しながら手術が実施できる手術用顕微鏡を提供することにある。
【0009】
【課題を解決するための手段】
請求項1の発明は、術部の立体画像を撮影する立体画像撮影手段と、この立体画像撮影手段とは少なくとも観察方向が異なり前記術部の画像を撮影する第2の撮影手段と、前記立体画像撮影手段及び第2の撮影手段による画像を合成する画像合成手段と、この画像合成手段にて合成された画像を表示する立体画像表示手段と、前記立体画像撮影手段又は第2の撮影手段の撮影状態を変更操作する操作手段と、この操作手段の操作を検出する操作検出部と、前記立体画像撮影手段及び前記第2の撮影手段の相対位置を検出する位置検出手段と、前記操作検出部の検出結果又は前記位置検出手段の検出結果に基づいて前記立体画像表示手段の表示画像における第2の撮影手段による画像の虚像位置を演算する演算手段と、この演算手段の演算結果に基づいて前記立体画像表示手段の表示画像における第2の撮影手段による画像の虚像位置を制御する虚像位置制御手段と、を有することを特徴とする手術用顕微鏡である。
【0010】
請求項2の発明は、術部の立体画像を撮影する立体画像撮影手段と、この画像撮影手段とは少なくとも観察方向が異なり前記術部の画像を撮影する第2の撮影手段と、前記立体画像撮影手段及び第2の撮影手段による画像を合成する画像合成手段と、この画像合成手段にて合成された画像を表示する立体画像表示手段と、前記立体画像撮影手段又は第2の撮影手段の撮影状態を変更操作する操作手段と、この操作手段の操作を検出する操作検出部と、前記立体画像撮影手段及び前記第2の撮影手段の相対位置を検出する位置検出手段と、前記操作検出部の検出結果又は前記位置検出手段の検出結果に基づいて前記立体画像表示手段の表示画像における第2の撮影手段による画像の位置を演算する演算手段と、この演算手段の演算結果に基づいて前記立体画像表示手段の表示画像における第2の撮影手段による2つの画像の位置が、前記立体画像撮影手段と前記第2の撮影手段の相対距離が離れるとそれに応じて前記第2の撮影手段による2つの表示画像を観察する輻輳角が大きくなるように制御する位置制御手段と、を有することを特徴とする手術用顕微鏡である。
【0011】
請求項3の発明は、前記第2の撮影手段は、前記立体画像撮影手段とは少なくとも観察方向が異なり前記術部の立体画像を撮影する撮影手段であることを特徴とする請求項1または請求項2に記載の手術用顕微鏡である。
【0013】
【発明の実施の形態】
以下、この発明の各実施の形態を図面に基づいて説明する。
【0014】
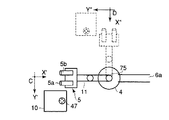
図1〜図11は第1の実施形態を示し、図1は手術用顕微鏡による観察システムを示し、手術用顕微鏡1は、架台2と、架台2の上部に設けられたバランスアーム3と、バランスアーム3の先端部に支持された鏡体4と、鏡体4に取付けられた表示部5から構成されている。
【0015】
バランスアーム3には複数の可動アーム6a,6b,6cと、6軸の回動軸7a〜7fとが設けられている。さらに、各回動軸7a〜7fにはバランスアーム3の各可動アーム6a,6b,6cの回動位置を固定するロック状態と、この回動位置のロックを解除するロック解除状態とに切り換える電磁鎖錠(図示しない)が設けられている。そして、鏡体4の電磁鎖錠のロック/ロック解除の切り換え動作に伴いバランスアーム3の各可動アーム6a,6b,6cの6軸の各回動軸7a〜7fを中心に空間的に位置移動自在に支持されている。
【0016】
バランスアーム3の可動アーム6aには図6に示すように、エンコーダ42aを有するモータ42が内蔵されている。モータ42の回転により鏡体4が図1のX方向に移動可能となるように鏡体4が保持されている。同様に、図6に示すように、可動アーム6bにはエンコーダ43aを有するモータ43が内蔵されている。モータ43の回転により鏡体4が図1のY方向に移動可能となるように鏡体4が保持されている。可動アーム6aと鏡体4を接続する回動軸7fにはエンコーダ42bが内蔵されている。
【0017】
前記表示部5は、アーム11により鏡体4に取付けられている。アーム11の一端は軸10aを中心に回動可能に鏡体4に取付けられている。軸10aにはアーム11の鏡体4に対する回転量を検知するためのアーム用エンコーダ44が内蔵されている。また、アーム11は、表示部5が上下移動可能なように関節部11aが設けられている。表示部5には術者が画像を観察するための接眼部5a,5bが設けられている。
【0018】
架台2にはモータ42、モータ43を駆動し、鏡体4に内蔵された後述するフォーカス光学系13、ズーム光学系14を駆動するための操作スイッチが配置されたフットスイッチ10が接続されている。
【0019】
また、鏡体4には鏡体4の空間位置検出のための指標4aが取付けられている。さらに、指標4aを検出するためのデジタイザ24はナビゲーション用ワークステーション25が接続されている。このワークステーション25は手術用顕微鏡1に内蔵された虚像位置演算部37に接続されている。
【0020】
次に、図2に基づいて鏡体4の内部構成を説明する。術部Pを観察するための観察光学系として、対物レンズ12、フォーカス光学系13、ズーム光学系14、結像レンズ15a,15bが配置されている。この結像レンズ15a,15bの結像位置に観察光学系の像を撮影する撮像素子16a,16bが設けられている。フォーカス光学系13にはエンコーダ17aを有したフォーカス用モータ17が設けられている。ズーム光学系14には、エンコーダ18aを有したズーム用モータ18が設けられている。
【0021】
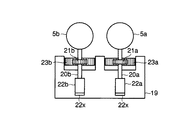
次に、図3及び図4に基づいて表示部5の内部構成について説明する。図3は表示部5の上面図、図4は図3のA−A線に沿う断面図である。表示部5は、ベース19と接眼部5a,5bとから構成されている。接眼部5aには支持ロッド20aの一端が回転可能に取付けられ、この支持ロッド20aの中間位置にはギア21aが固定されている。支持ロッド20aの他端にはベース19に対して固定されたエンコーダ22xを有した輻輳角変更用モータ22aが設けられている。
【0022】
さらに、ベース19にはギア21aと噛合するラック23aが設けられている。また、接眼部5aには回動軸24aが設けられており、ベース19に対して回動可能に取付けられている。
【0023】
同様に、接眼部5bには支持ロッド20bの一端が回転可能に取付けられ、この支持ロッド20bの中間位置にはギア21bが固定されている。支持ロッド21bの他端にはベース19に対して固定されたエンコーダ22x’を有した輻輳角変更用モータ22bが設けられている。
【0024】
さらに、ベース19にはギア21bと噛合するラック23bが設けられている。また、接眼部5aには回動軸24bが設けられており、ベース19に対して回動可能に取付けられている。
【0025】
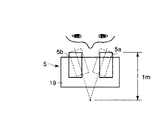
次に、図5に基づいて接眼部5a,5bを説明するが、接眼部5a,5bは同一構成であるため、一方の接眼部5aについてのみ説明する。
【0026】
接眼部5aにはLCD27a及び接眼レンズ28aが内蔵されている。接眼レンズ28aは枠体29aにより保持されている。枠体29aにはねじ孔が設けられ、このねじ孔にはスクリューロッド30aの一端部が噛合されている。スクリューロッド30aの他端部には傘歯車31aが取付けられている。傘歯車31aにはこれを挟むように2つの傘歯車32a,33aが噛合されている。
【0027】
一方の傘歯車32aには視度調整つまみ34aが取付けられ、他方の傘歯車33aには傘歯車33aを回転駆動させるべくエンコーダ35xを有した接眼レンズ用モータ35aが設けられている。
【0028】
次に、図6に基づいて制御回路について説明する。
【0029】
フォーカス用のエンコーダ17a、ズーム用エンコーダ18a、輻輳角変更用エンコーダ22x,22X’、接眼レンズ用エンコーダ35x,35X’は虚像位置演算部37に接続されている。虚像位置演算部37には表示部モータ制御部38が接続されている。表示部モータ制御部38には輻輳角変更用モータ22a,22b、接眼レンズ用モータ35a,35bが接続されている。フォーカス用モータ17、ズーム用モータ18は、各々フォーカスモータ制御部39、ズームモータ制御部40に接続されている。
【0030】
フォーカスモータ制御部40はフットスイッチ10に設けられたフォーカス用スイッチ41に接続されている。ズームモータ制御部40にはフットスイッチ10に設けられたズーム用スイッチ42が接続されている。
【0031】
また、架台X軸用のモータ42及びY軸用のモータ43はアーム用モータ制御部44に接続されている。アーム用エンコーダ45、X軸用エンコーダ42a,Y軸用エンコーダ43aはXY移動方向演算部46に接続されている。XY移動方向演算部46はアーム用モータ制御部44及びフットスイッチ10に設けられたXY制御スイッチ47に接続されている。さらに、ワークステーション25にはデジタイザ24と虚像位置演算部37が接続されている。また、前記視線検出部36a,36bは視線演算部48が接続され、視線演算部48はワークステーション25が接続されている。
【0032】
図7はLCD27a,27bに撮像素子の映像を表示する構成を示し、撮像素子16a,16bはカメラコントロールユニット49(以下CCU49という)に接続されている。CCU49にはLCD27a,27bが接続されている。
【0033】
次に、第1の実施形態の作用について説明する。
【0034】
術者は、手術用顕微鏡1による観察を始めるために、図示しない電源スイッチを入れる。電源スイッチを入れると、虚像位置演算部37は輻輳角検出用のエンコーダ22x,22x’からエンコーダ値を受け取る。虚像位置演算部37は虚像位置を術者から1m先にセットすべくあらかじめ記録された輻輳角及び視度補正位置に対応した各エンコーダの目標値と前記エンコーダから取得したエンコーダ値の比較を行う。この結果、虚像位置演算部37は輻輳角変更用モータ22a,22b及び接眼レンズ用モータ35a,35bの回転方向及び回転量を演算する。さらに、虚像位置演算部37は表示モータ制御部38に対して駆動信号を出力する。この結果、各モータ35a,35bが駆動される。
【0035】
駆動信号を受け取った輻輳角変更用モータ22aは回転を開始する。輻輳角変更用モータ22aが回転すると、支持ロッド20aが回転してギア21aが回転する。ギア21aが回転すると、これと噛合しているラック23aによってギア21aが図3の矢印Q方向に移動する。ギア21aが移動することにより、接眼部5aは回動軸24aを中心にギア21aと同方向に回動する。
【0036】
輻輳角変更用モータ22bは、輻輳角変更用モータ22aと逆方向に回転する。前述と同様に作用し、ギア21bは図3の矢印R方向に移動して接眼部5bは回動軸24bを中心にギア21aと同方向に回転する。接眼部5a,5bが移動しているときに、虚像位置演算部37はエンコーダ22x,22x’はそれぞれのエンコーダ値を常に取得している。接眼部5a,5bの位置が図8の破線に示す位置まで移動したことを検出すると、虚像位置演算部37は表示部モータ制御部38に出力していた駆動信号を停止する。これにより、接眼部5a,5bの輻輳角は、1mに設定される。
【0037】
次に、CCU49はLCD37a,37bに対して図9に示すような視度補正のためのレチクル画像Gを出力する。術者は、調整つまみ34a,34bを回すことにより視度補正を行う。調整つまみ34aを回転させると、傘歯車32aが回転する。傘歯車32aの回転により傘歯車31aが回転する。傘歯車31aの回転によりスクリューロッド30aが回転し、さらに、スクリューロッド30aと螺合している枠体29aが移動し、枠体29aに固定された接眼レンズ28aが移動する。調整つまみ34aを回すことにより、接眼レンズ28aの位置を術者に対して前後させ、視度補正を行う。
【0038】
次に、術者は図示しない操作スイッチによりLCD37a,37bに表示されている画像を撮像素子16a,16bからの画像に切り換える。さらに、術者は、術部Pを観察すべく鏡体4を移動させ、鏡体4及び表示部5を例えば図10の実線位置に配置する。術者は位置Cに立ち、接眼部5a,5bより術部Pの観察を行う。
【0039】
虚像位置演算部37は、この時点におけるフォーカス用のエンコーダ17a、ズーム用エンコーダ18aからエンコーダ値を取得し、焦点位置fと総合倍率を演算する。さらに、虚像位置演算部37は、この演算結果を元に、図11に示すグラフに応じた視度変化量及び輻輳角を算出する。
【0040】
虚像位置演算部37は、この算出結果と輻輳角用のエンコーダ22x,22x’及び接眼レンズ用のエンコーダ35x,35x’の値と比較演算し、輻輳角変更用モータ22a,22b及び接眼レンズ用モータ35a,35bの移動方向及び移動量を算出する。
【0041】
虚像位置演算部37は、この算出結果を元に表示部モータ制御部38に対して駆動信号を出力し、輻輳角変更用モータ22a,22b及び接眼レンズ用モータ35a,35bが駆動され、現在の観察点に対応した虚像位置に術部画像が表示される。
【0042】
次に、術者は、手術を進めながらより深い術部Pを観察する場合、フットスイッチ10のフォーカス用スイッチ41を操作する。この操作信号はフォーカスモータ制御部39に伝達され、フォーカス用モータ17が焦点距離を伸ばす方向へ駆動される。これに伴いフォーカス用のエンコーダ17aの値も変化し、この情報が虚像位置演算部37へ伝達される。虚像位置演算部37は、図11のグラフにしたがい、焦点位置の移動に追従して視度補正変化量及び輻輳角を算出し、輻輳角変更用モータ22a,22b及び接眼レンズ用モータ35a,35bの駆動を行う。これにより、フォーカス移動に追従し、虚像位置が最適な位置に制御される。すなわち、焦点位置が遠くになるほど虚像位置は遠くに表示され、焦点位置が近くになるほど虚像位置も近くに表示される。
【0043】
同様に、術者が観察倍率を変更する場合、フットスイッチ10のズーム用スイッチ42を操作する。この操作信号はズームモータ制御部40に伝達され、ズーム用モータ18が例えば倍率を大きくする方向へ駆動される。これに伴いズーム用のエンコーダ18aの値も変化し、この情報が虚像位置演算部37へ伝達される。虚像位置演算部37は図11のグラフにしたがい、総合倍率の変化に追従して視度補正変化量及び輻輳角を算出し、輻輳角変更用モータ22a,22b及び接眼レンズ用モータ35a,35bの駆動を行う。これによりズーム操作に追従し、虚像位置が最適な位置に制御される。すなわち、総合倍率が高くなるほど虚像位置は近くに表示され、総合倍率は小さくなるほど虚像位置は遠くに表示される。
【0044】
術者は観察位置を移動するために、フットスイッチ10に設けられたXY制御スイッチ47を操作する。術者が位置Cから術部Pを観察している場合には、例えば方向X’に鏡体4を移動させたい場合、フットスイッチ10のXY制御スイッチ47をX’方向に操作する。この操作信号はXY移動方向演算部46に伝達される。XY移動方向演算部46はアーム用エンコーダ45及びエンコーダ42bからエンコーダ値を取得しモータ42,43の各々の移動方向を算出する。
【0045】
術者が位置Cより操作する場合、エンコーダ値のそれぞれは、例えば原点に設定されているため、可動アーム6aに内蔵されたX方向のモータ42のみが駆動され、鏡体4は図1のX方向に移動される。次に、術者が観察方向を変更し、図10の位置Dより術部Pを観察する場合、表示部5を図10の破線位置に移動する。この場合、フットスイッチ10の操作をしやすくするために、フットスイッチ10も図10の破線位置に設置し直す。
【0046】
術者は、さらに観察位置を移動するために、フットスイッチ10に設けられたXY制御スイッチ47を操作する。術者が位置Dから術部Pを観察している場合には、例えば方向X”に鏡体4を移動させたい場合、フットスイッチ10のXY制御スイッチ47をX”方向に操作する。この操作信号はXY移動方向演算部46に伝達される。XY移動方向演算部46はアーム用エンコーダ45及びエンコーダ42bからエンコーダ値を取得する。エンコーダ値は、移動前とは例えば90度変化しているため、XY移動方向演算部46は、この変化量に基づき、モータ42、43に対する駆動方向を90度補正して駆動信号を出力する。すなわち、可動アーム6aに内蔵されたY方向のモータ43のみが駆動され、鏡体4は、図1のY方向に移動される。これによって、表示部5の鏡体4に対する位置が変化しても、フットスイッチ10の操作方向に対応した方向に観察位置を移動することができる。
【0047】
前述した第1の実施形態によれば、手術用顕微鏡1の光学操作にともなって、接眼レンズ28a,28bが移動すること及び接眼部5a,5bの角度が変り、輻輳角が変更されることにより、術者は実際の光学系の移動にともなってより自然な遠近感を感じることができるため、微細な手術においても操作性がよい。また、虚像位置が変化するため、眼の疲労を軽減することができる。表示部5を移動させても、術者からみた前後左右方向にフットスイッチ10を操作することで、観察点を同じ方向に移動させることができるため、鏡体4の移動がしやすくなる。
【0048】
図12及び図13は第2の実施形態を示し、術者の好みにあわせた虚像位置に調整し、観察画像に自然な遠近感を持たせるようにしたものであり、第1の実施形態と同一構成部分は同一番号を付して説明を省略する。
【0049】
図12は、虚像位置に調整した後の輻輳角の値を記録するための制御回路のブロック図である。表示用モータ制御部38には輻輳角調整スイッチ50が接続されている。輻輳角調整スイッチ50は輻輳角変更用モータ22a,22bを駆動させるためのスイッチである。虚像位置演算部37には設定記録部51及び設定スイッチ52が接続されている。設定記録部51は輻輳角変更用エンコーダ22x,22x’及び接眼レンズ用のエンコーダ35x,35x’を記録するものである。虚像位置演算部37にはワークステーション25が接続されている。
【0050】
次に、第2の実施形態の作用について説明する。
【0051】
第1の実施形態と同様に、術者は、LCD37a,37bに表示されたレチクル画像を元に、視度補正を行う。次に、輻輳角調整用スイッチ50を操作する。この操作信号は表示部モータ制御部38に伝達され、輻輳角変更用モータ22a,22bが駆動される。これによって、術者は好みの輻輳角に接眼部5a,5bを調整する。このときの輻輳角変更用のエンコーダ22x,22x’及び接眼レンズ用のエンコーダ35x,35x’のエンコーダ値は、虚像位置演算部37へ伝達される。
【0052】
ここで、術者が設定スイッチ34を操作すると、虚像位置演算部37は、先に取得した各エンコーダ22x,22x’及び35x,35x’のエンコーダ値を基準値として設定記録部51へ記録する。
【0053】
この基準値は、図13に示すグラフの縦軸(視度変化量及び輻輳角)の中間値をシフトさせるものである。例えば、図13に示すように設定される。術者は,術部を観察する場合、焦点位置移動、総合倍率変更を第1の実施形態と同様に行うが、これにともなう、輻輳角の変更及び視度の微調整は、図13に示されたグラフにもとづいて行われる。
【0054】
術者が観察位置又は観察方向を変化させるために、鏡体4に設けられたグリップにより鏡体4の位置を移動させる。ワークステーション25は鏡体4に設置された指標4aの位置を検出しており、この位置があらかじめ設定した移動範囲を超えた場合、虚像位置演算部37に対して信号を出力する戯位置演算部37は、ワークステーション25からこの信号を受け取ると、図13のグラフに示した基準位置に輻輳角と視度補正位置へ移動するように、表示部モータ制御部38へ駆動信号を出力する。これにより、輻輳角変更用モータ22a,22b及び接眼レンズ用モータ35a、35bが駆動され、術者が術前に設定した最も観察しやすい虚像位置に復帰される。
【0055】
表示部5を鏡体4に対して移動させたときに、予め設定されたアーム用エンコーダ45の移動範囲を超えると、前述と同様の作用で、術前に設定した虚像位置に復帰させても良い。また、本実施形態では、術者が術前に設定した虚像位置により図13におけるグラフの縦軸の中間値をシフトさせたが、虚像位置の調整範囲を術者の好みに設定できるようにしてもよい。
【0056】
本実施形態によれば、術者が、最も観察しやすい虚像位置を設定することができるため、さらに遠近感がつかみやすく、疲労も軽減される。また、観察位置を大きく動かした場合には、術者が最も観察しやすい位置に虚像位置が復帰するため、さらに観察しやすい。
【0057】
図14〜図18は第3の実施形態を示し、内視鏡を併用した場合、もしくは単独で使用する場合に、術者が内視鏡の観察像に遠近感をもって観察することができるようにしたものであり、第1の実施形態と同一構成部分は同一番号を付して説明を省略する。
【0058】
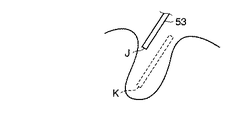
図14は鏡体4と内視鏡53の配置構成を示し、術部Pを手術用顕微鏡1で観察するために、鏡体4を術部Pに対向させるとともに、手術用顕微鏡1の死角を観察するために内視鏡53が術部Pに向かって斜めに挿入されている。内視鏡把持部54には位置検出のための指標55が設けられている。
【0059】
図15は、内視鏡53により撮像された画像を処理するための制御回路のブロック図で、内視鏡53と撮像装置56が接続されている。撮像装置56は内視鏡53で撮影された電気信号を映像信号に変換するものである。撮像素子16a,16bには電気信号を映像信号に変換するCCU49が接続されている。画像合成手段57にはCCU49と撮像装置56が接続されている。画像合成手段57にはLCD37a,37b及びワークステーション25が接続されている。
【0060】
次に、第3の実施形態の作用について説明する。
【0061】
術者は、内視鏡53を併用して観察を行なうために、図14に示すように、手術用顕微鏡1の鏡体4を配置し、内視鏡53にて観察を行う。手術用顕微鏡1による画像は撮像素子16a,16bからCCU49に送られ、画像合成手段57に伝達されている。内視鏡53により観察されている画像は撮像装置56に送られ、撮像装置56は映像信号を画像合成手段57に伝達する。デジタイザ24は手術用顕微鏡1の指標4aと内視鏡53の指標55を検出し、ワークステーション25に伝達する。
【0062】
ワークステーション25は、内視鏡53の指標55と手術用顕微鏡1の指標4aの距離を演算する。演算された距離データは画像合成手段57に伝達される。図16の位置Jのように、内視鏡53を浅い位置に挿入しているときには指標4aと指標55の距離が近く検出される。画像合成手段57は受け取った距離データを元に撮像装置56とCCU49の画像を図17のように合成する。画像58Aと58Bは撮像素子16a,16bによる手術用顕微鏡1の観察画像あり、画像59Aと59Bが内視鏡53により撮影されている画像である。
【0063】
画像59Aにおいて、内視鏡画像は右端に表示される。一方、画像59Bには内視鏡画像が左端に表示される。術者から見ると内視鏡画像の輻輳角は小さくなり、虚像位置が遠くに設定される。
【0064】
術者が内視鏡53を操作し、図16の位置Kまで挿入する。このときには、ワークステーション25より手術用顕微鏡1と内視鏡53の距離が遠く検出される。ワークステーション25より距離データが画像合成手段57へ伝達される。画像合成手段57において、図18に示すように、内視鏡像60Aの左端に内視鏡53を表示し、内視鏡像60Bの右端に内視鏡像を表示する。
【0065】
術者には、内視鏡像60A、60Bに対する輻輳角が大きくなり、内視鏡像の虚像位置が近くに設定される。鏡体4による撮影画像は61A、61Bに表示されているが、この虚像位置は第1及び第2の実施形態と同様に、輻輳角変更用モータ22a,22b及び接眼レンズ用モータ35a,35bにより制御されており、内視鏡53の虚像位置とは異なる位置に設定されている。なお、本実施形態は、内視鏡53に2次元の画像を使用したが、立体内視鏡を用いても同様の効果が得られることは明らかである。
【0066】
本実施形態によれば、内視鏡を併用する際、手術用顕微鏡1の虚像位置に独立して内視鏡53の虚像位置を変化させることができ、より遠近感を把握しやすい。
【0067】
図19〜図22は第4の実施形態を示し、術部を撮影する鏡体と、撮影された鏡体と、撮影した像を表示する表示手段の位置を各々自由に変えられる構成において、術者の意図した方向に観察位置の移動操作を行えるようにしたものであり、第1の実施形態と同一構成部分は同一番号を付して説明を省略する。
【0068】
手術用顕微鏡1には表示モニタ70が接続されている。表示モニタ70にはLCD71a,71bが内蔵されている。LCD71a,71bは鏡体4の撮像素子16a,16bで撮影された映像を表示するものである。また、表示モニタ70にはデジタイザ24による位置検出のための指標72とフットスイッチ10が設けられている。さらに、可動アーム6aの先端部には指標73が設けられている。
【0069】
図20は、XY移動操作及び表示モニタ70での画像表示を行う制御回路のブロック図である。位置演算を行うワークステーション25はXY移動方向演算部46が接続されている。鏡体4に内蔵された撮像素子16a,16bにはCCU49が接続されている。CCU49にはLCD71a,71bが接続されている。
【0070】
図21は、表示モニタ70の変形例である。位置検出兼用モニタ74の片面にはLCD71a,71bが内蔵されており、もう一方の面にはデジタイザ24と同様の機能を有したデジタイザ75が設けられている。
【0071】
次に、第4の実施形態の作用について説明する。
【0072】
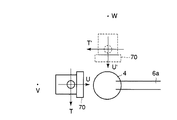
デジタイザ24は指標73の位置を検出する。デジタイザ24による位置情報を受け取ったワークステーション25は、表示モニタ70及び視野移動機構を有する可動アーム6aの相対位置を演算する。この演算された位置情報はXY移動方向演算部46に伝達される。図22において、術者が位置Vから術部を観察しているときに、例えば方向Uに鏡体4を移動させたい場合、フットスイッチ10のXY制御スイッチ47をU方向に操作する。この操作信号はXY移動方向演算部46に伝達される。XY移動方向演算部46ではワークステーション25から伝達された表示モニタ70と可動アーム6aの先端位置を元に、モータ42、モータ43の各々の移動方向を算出する。術者が位置Vより操作する場合、エンコーダ値は、例えば原点に設定されているため、可動アーム6aに内蔵されたX方向のモータ42のみが駆動され、鏡体4は図22のU方向に移動される。
【0073】
次に、術者が観察方向を変更し、位置Wより術部を観察する場合、表示モニタ70を図22の破線位置へ移動する。この位置移動はデジタイザ24にて検出され、ワークステーション25で位置演算が行う。さらに、表示モニタ70と可動アーム6aの先端位置の相対位置を演算する。位置演算結果は、XY移動方向演算部46に伝達される。
【0074】
術者は、さらに観察位置を移動するために、フットスイッチ10に設けられたXY制御スイッチ47を操作する。例えば、方向U’に鏡体4を移動させたい場合、XY制御スイッチ47をU’方向に操作する。この操作信号はXY移動方向演算部46に伝達される。
【0075】
表示モニタ70と可動アーム6aの先端の相対位置は移動前とは例えば90度変化しているため、XY移動方向演算部46は、この変化量に基づきモータ42、モータ43に対する駆動方向を90度補正して駆動信号を出力する。すなわち、可動アーム6bに内蔵されたY方向のモータ43のみが駆動され、鏡体4は図22のU’方向に移動される。また、可動アーム6aの位置を移動させる場合でも前述と同様の作用を行う。
【0076】
術者が表示モニタ70を位置Vから位置Wに移動させ場合、術者の方向から見た術部が表示モニタ70に表示されるように、撮像素子16a,16bの位置を移動させると、なお好ましい。
【0077】
以上の作用は、図21に示した位置検出兼用モニタ74を使用した場合でも同様であることは明らかである。
【0078】
前述した各実施の形態によれば、次のような構成が得られる。
【0079】
(付記1)術部の立体画像を撮影する立体画像撮影手段と、この立体画像撮影手段による画像を表示する立体画像表示手段と、前記立体画像撮影手段の撮影状態又は前記立体画像表示手段の表示状態を変更操作する操作手段と、この操作手段の操作を検出する操作検出部と、この操作検出部の検出結果及び操作量に基づいて前記立体画像表示手段の表示画像の虚像位置を演算する演算手段と、この演算手段の演算結果に基づいて前記立体画像表示手段の虚像位置を制御する虚像位置制御手段とを有することを特徴とする手術用顕微鏡。
【0080】
(付記2)前記操作手段は、以下の少なくとも一つを含む付記1記載の手術用顕微鏡。
【0081】
(1) 立体画像撮影手段の撮影焦点距離を変更操作する手段
(2) 立体画像撮影手段の撮影倍率を変更操作する手段
(3) 立体画像表示手段の表示倍率を変更操作する手段
(4) 立体画像撮影手段の観察位置または観察方向を変更操作する手段
(5) 立体画像表示手段の位置を変更操作する手段
(付記3)前記虚像位置制御手段は、以下の少なくとも一つを含む付記1又は2記載の手術用顕微鏡。
【0082】
(1) 立体画像表示手段の輻輳角を制御する手段
(2) 立体画像表示手段の視度調整部を制御する手段
(3) 立体画像表示手段の画像表示位置を制御する手段
(付記4)前記虚像位置制御手段の制御量を調整する調整手段を有することを特徴とする付記1〜3のいずれかに記載の手術用顕微鏡。
【0083】
(付記5)前記虚像位置制御手段の制御量を調整する調整手段と、前記調整手段の調整結果を記録する記録手段とを有することを特徴とする付記1〜3のいずれかに記載の手術用顕微鏡。
【0084】
(付記6)前記虚像位置制御手段は、以下の少なくとも一つの操作手段により、虚像位置を基準位置に復帰する復帰手段を含むことを特徴とする付記1〜5のいずかに記載の手術用顕微鏡。
【0085】
(1) 立体画像撮影手段の観察位置または観察方向を変更操作する手段
(2) 立体画像表示手段の位置を変更操作する手段
(付記7)前記立体画像撮影手段は、3次元空間で移動自在なアームに保持されていることを特徴とする付記1〜6のいずれかに記載の手術用顕微鏡。
【0086】
(付記8)術部の立体画像を撮影する立体画像撮影手段と、この立体画像撮影手段とは少なくとも観察方向の異なる第2の撮影手段と、前記立体画像撮影手段及び第2の撮影手段による画像を合成する画像合成手段と、この画像合成手段にて合成された画像を表示する立体画像表示手段と、前記立体画像撮影手段及び第2の撮影手段の撮影状態を変更操作する操作手段と、この操作手段の操作を検出する操作検出部と、前記立体画像撮影手段及び第2の撮影手段の相対位置を検出する位置検出手段と、前記操作検出部の検出結果、操作量及び位置検出手段の検出結果に基づいて前記立体画像表示手段の立体画像撮影手段による表示画像と第2の撮影手段による表示画像との虚像位置を各々演算する演算手段と、この演算手段の演算結果に基づいて前記立体画像表示手段の立体画像撮影手段の表示画像と第2の撮影手段による表示画像と虚像位置を各々制御する虚像位置制御手段とを備えたことを特徴とする手術用顕微鏡。
【0087】
(付記9)前記第2の撮影手段は、内視鏡であることを特徴とする付記8記載の手術用顕微鏡。
(付記10)術部の画像を撮影する画像撮影手段と、この画像撮影手段にて撮影された画像を表示する画像表示手段と、前記画像撮影手段を3次元空間で移動自在に保持するアームと、前記画像撮影手段の撮影位置を略水平面内で移動を行う撮影位置移動手段と、この撮影位置移動手段に操作信号を出力する撮影位置移動スイッチと、前記画像表示手段と前記撮影位置移動手段との相対位置を検出する検出手段と、この検出手段の検出結果と前記撮影位置移動スイッチの操作信号に応じて、前記撮影位置移動手段の移動方向を制御する制御手段とを有することを特徴とする手術用顕微鏡。
【0088】
【発明の効果】
以上説明したように、この発明によれば、観察光学系の操作や術具、内視鏡の挿入に合わせて、術者が術部の遠近感を確実に把握しながら手術が実施できる手術用顕微鏡を提供する。
【図面の簡単な説明】
【図1】この発明の第1の実施形態を示す手術用顕微鏡システムの斜視図。
【図2】同実施形態の鏡体の縦断側面図。
【図3】同実施形態の表示部の内部構成を示す上面図。
【図4】同実施形態を示し、図3のA−A線に沿う断面図。
【図5】同実施形態の接眼部の内部構成を示す上面図。
【図6】同実施形態の制御装置のブロック図。
【図7】同実施形態の制御装置のブロック図。
【図8】同実施形態の表示部の作用説明図。
【図9】同実施形態のレチクル画像を示す図。
【図10】同実施形態の鏡体の作用説明図。
【図11】同実施形態を示し、総合倍率と視度変化量及び輻輳角の関係を示すグラフ。
【図12】この発明の第2の実施形態の制御装置のブロック図。
【図13】同実施形態を示し、総合倍率と視度変化量及び輻輳角の関係を示すグラフ。
【図14】この発明の第3の実施形態を示し、鏡体と内視鏡との配置構造を示す正面図。
【図15】同実施形態の制御装置のブロック図。
【図16】同実施形態の作用説明図。
【図17】同実施形態の合成画像を示す図。
【図18】同実施形態の合成画像を示す図。
【図19】この発明の第4の実施形態を示す手術用顕微鏡システムの斜視図。
【図20】同実施形態の制御装置のブロック図。
【図21】同実施形態の変形例を示す表示モニタの斜視図。
【図22】同実施形態の作用説明図。
【符号の説明】
4…鏡体(立体画像撮影手段)
5…表示部(立体画像表示手段)
17…フォーカス用モータ
18…ズーム用モータ
22a,22b…輻輳角変更用モータ
35a,35b…接眼レンズ用モータ
37…虚像位置演算部
38…表示部モータ制御部
39…フォーカスモータ制御部
40…ズームモータ制御部
46…XY移動方向演算部
Claims (3)
- 術部の立体画像を撮影する立体画像撮影手段と、
この立体画像撮影手段とは少なくとも観察方向が異なり前記術部の画像を撮影する第2の撮影手段と、
前記立体画像撮影手段及び第2の撮影手段による画像を合成する画像合成手段と、
この画像合成手段にて合成された画像を表示する立体画像表示手段と、
前記立体画像撮影手段又は第2の撮影手段の撮影状態を変更操作する操作手段と、
この操作手段の操作を検出する操作検出部と、
前記立体画像撮影手段及び前記第2の撮影手段の相対位置を検出する位置検出手段と、
前記操作検出部の検出結果又は前記位置検出手段の検出結果に基づいて前記立体画像表示手段の表示画像における第2の撮影手段による画像の虚像位置を演算する演算手段と、
この演算手段の演算結果に基づいて前記立体画像表示手段の表示画像における第2の撮影手段による画像の虚像位置を制御する虚像位置制御手段と、
を有することを特徴とする手術用顕微鏡。 - 術部の立体画像を撮影する立体画像撮影手段と、
この画像撮影手段とは少なくとも観察方向が異なり前記術部の画像を撮影する第2の撮影手段と、
前記立体画像撮影手段及び第2の撮影手段による画像を合成する画像合成手段と、
この画像合成手段にて合成された画像を表示する立体画像表示手段と、
前記立体画像撮影手段又は第2の撮影手段の撮影状態を変更操作する操作手段と、
この操作手段の操作を検出する操作検出部と、
前記立体画像撮影手段及び前記第2の撮影手段の相対位置を検出する位置検出手段と、
前記操作検出部の検出結果又は前記位置検出手段の検出結果に基づいて前記立体画像表示手段の表示画像における第2の撮影手段による画像の位置を演算する演算手段と、
この演算手段の演算結果に基づいて前記立体画像表示手段の表示画像における第2の撮影手段による2つの画像の位置が、前記立体画像撮影手段と前記第2の撮影手段の相対距離が離れるとそれに応じて前記第2の撮影手段による2つの表示画像を観察する輻輳角が大きくなるように制御する位置制御手段と、
を有することを特徴とする手術用顕微鏡。 - 前記第2の撮影手段は、前記立体画像撮影手段とは少なくとも観察方向が異なり前記術部の立体画像を撮影する撮影手段であることを特徴とする請求項1または請求項2に記載の手術用顕微鏡。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002127247A JP4046545B2 (ja) | 2002-04-26 | 2002-04-26 | 手術用顕微鏡 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002127247A JP4046545B2 (ja) | 2002-04-26 | 2002-04-26 | 手術用顕微鏡 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2003322803A JP2003322803A (ja) | 2003-11-14 |
| JP2003322803A5 JP2003322803A5 (ja) | 2005-09-08 |
| JP4046545B2 true JP4046545B2 (ja) | 2008-02-13 |
Family
ID=29541413
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002127247A Expired - Fee Related JP4046545B2 (ja) | 2002-04-26 | 2002-04-26 | 手術用顕微鏡 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4046545B2 (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7268938B2 (en) | 2004-04-07 | 2007-09-11 | Olympus Coporation | In-vivo examination apparatus |
| JP4587693B2 (ja) * | 2004-04-07 | 2010-11-24 | オリンパス株式会社 | 生体観察装置 |
| JP4695357B2 (ja) * | 2004-07-20 | 2011-06-08 | オリンパス株式会社 | 手術システム |
| JP2006139181A (ja) * | 2004-11-15 | 2006-06-01 | Olympus Corp | 顕微鏡装置 |
| JP4716747B2 (ja) * | 2005-02-16 | 2011-07-06 | オリンパス株式会社 | 医療用立体画像観察装置 |
| JP2008237749A (ja) * | 2007-03-28 | 2008-10-09 | Olympus Medical Systems Corp | 立体観察システム |
| US8105233B2 (en) | 2007-10-24 | 2012-01-31 | Tarek Ahmed Nabil Abou El Kheir | Endoscopic system and method for therapeutic applications and obtaining 3-dimensional human vision simulated imaging with real dynamic convergence |
| US9936863B2 (en) | 2012-06-27 | 2018-04-10 | Camplex, Inc. | Optical assembly providing a surgical microscope view for a surgical visualization system |
| US9642606B2 (en) | 2012-06-27 | 2017-05-09 | Camplex, Inc. | Surgical visualization system |
| EP2999414B1 (en) | 2013-05-21 | 2018-08-08 | Camplex, Inc. | Surgical visualization systems |
| US10881286B2 (en) | 2013-09-20 | 2021-01-05 | Camplex, Inc. | Medical apparatus for use with a surgical tubular retractor |
| JP6521982B2 (ja) | 2013-09-20 | 2019-05-29 | キャンプレックス インコーポレイテッド | 手術可視化システム及びディスプレイ |
| EP3226799A4 (en) | 2014-12-05 | 2018-07-25 | Camplex, Inc. | Surgical visualization systems and displays |
| WO2016154589A1 (en) | 2015-03-25 | 2016-09-29 | Camplex, Inc. | Surgical visualization systems and displays |
| US10966798B2 (en) | 2015-11-25 | 2021-04-06 | Camplex, Inc. | Surgical visualization systems and displays |
| US10918455B2 (en) | 2017-05-08 | 2021-02-16 | Camplex, Inc. | Variable light source |
| JP2021121821A (ja) | 2018-05-07 | 2021-08-26 | ソニーグループ株式会社 | 眼科手術顕微鏡システム、制御装置及び制御方法 |
| WO2026053043A1 (en) * | 2024-09-05 | 2026-03-12 | Alcon Inc. | Digital binoculars with decentered micro-display screens for improved convergence |
-
2002
- 2002-04-26 JP JP2002127247A patent/JP4046545B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003322803A (ja) | 2003-11-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4046545B2 (ja) | 手術用顕微鏡 | |
| JP3618413B2 (ja) | 内視鏡装置 | |
| JP6521982B2 (ja) | 手術可視化システム及びディスプレイ | |
| CN104902797B (zh) | 用于微创外科手术的具有多摄像机系统的内窥镜 | |
| US11478133B2 (en) | Medical observation system, apparatus for controlling the same, and method for controlling the same | |
| EP2903551B1 (en) | Digital system for surgical video capturing and display | |
| JP4832679B2 (ja) | 顕微鏡システム | |
| JP3506809B2 (ja) | 体腔内観察装置 | |
| US11033338B2 (en) | Medical information processing apparatus, information processing method, and medical information processing system | |
| JP3540375B2 (ja) | 内視鏡を先に接続した観察及び/又は映像化装置並びにそれを動作させる方法 | |
| JP2021013412A (ja) | 医療用観察システム、制御装置及び制御方法 | |
| WO2018159338A1 (ja) | 医療用支持アームシステムおよび制御装置 | |
| JP4754674B2 (ja) | 手術用顕微鏡 | |
| JPH10309258A (ja) | 体腔内観察装置 | |
| JP2003250812A (ja) | 医療用立体表示装置 | |
| CN106886087B (zh) | 手术用立体观察装置 | |
| JP4716545B2 (ja) | 手術用顕微鏡装置 | |
| JP3668269B2 (ja) | 体腔内手術用マニピュレータ装置 | |
| JP4383188B2 (ja) | 立体観察システム | |
| JP3717893B2 (ja) | 手術用顕微鏡 | |
| JP3816599B2 (ja) | 体腔内処置観察システム | |
| JP4426770B2 (ja) | 内視鏡保持装置 | |
| JP4455419B2 (ja) | 手術用立体画像観察装置 | |
| JP4674094B2 (ja) | 立体観察装置 | |
| JP2009095598A (ja) | ヘッドマウント型双眼ルーペ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050311 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050311 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070808 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070821 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071022 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20071113 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20071120 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101130 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4046545 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101130 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111130 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111130 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121130 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131130 Year of fee payment: 6 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |