JP3950673B2 - 駆動装置及び光量制御装置 - Google Patents
駆動装置及び光量制御装置 Download PDFInfo
- Publication number
- JP3950673B2 JP3950673B2 JP2001348309A JP2001348309A JP3950673B2 JP 3950673 B2 JP3950673 B2 JP 3950673B2 JP 2001348309 A JP2001348309 A JP 2001348309A JP 2001348309 A JP2001348309 A JP 2001348309A JP 3950673 B2 JP3950673 B2 JP 3950673B2
- Authority
- JP
- Japan
- Prior art keywords
- magnet
- magnetic pole
- stator
- coil
- outer magnetic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Landscapes
- Diaphragms For Cameras (AREA)
- Shutters For Cameras (AREA)
Description
【発明の属する技術分野】
本発明は、超小型に構成した駆動装置とそれを用いた光量制御装置に関する。
【0002】
【従来の技術】
従来、小型モータに適する形態としてブラシレスタイプのものがあげられる。ブラシレスタイプのモータで駆動回路の単純なものとしては以下に記載する永久磁石を用いたステップモータがある。
【0003】
小型円筒形状のステップモータとしてはまず図7に示すものがある。これは、ボビン101にステータコイル105が同心状に巻回され、ボビン101は2個のステータヨーク106で軸方向から挟持固定されており、かつステータヨーク106にはボビン101の内径面円周方向にステータ歯106aと106bが交互に配置され、ケース103には、ステータ歯106aまたは106bと一体のステータヨーク106が固定されてステータ102が構成されている。2組のケース103の一方にはフランジ115と軸受け108が固定され、他方のケース103には他の軸受け108が固定されている。ロータ109はロータ軸110に固定されたロータ磁石111からなり、ロータ磁石111はステータ102のステータヨーク106aと放射状の空隙部を形成している。そして、ロータ軸110は2個の軸受け108の間に回転可能に支持されている。
【0004】
このような構造のステップモータの変形例として、特公昭53−2774号で提案される光制御装置がある。これはステップモータに連結するシャッタ羽根をステップ的に開閉させて光の通過量を制御するものである。また、別の変形例として、特開昭57−166847号で提案される中空形モータがある。これはステップモータをリング状の構造として、その中央部の空洞を光等が通過可能としたものである。
【0005】
また、1個のコイルで駆動するステップモータとしては時計で多く用いられている図9に示すものがある。201は永久磁石からなるロータ、202、203はステータ、204はコイルである。
【0006】
【発明が解決しようとする課題】
しかしながら、図7に示す上記従来の小型のステップモータは、ロータの外周にケース103、ボビン101、ステータコイル105、ステータヨーク106が同心状に配置されているため、モータの外形寸法が大きくなってしまう欠点があった。また、ステータコイル105への通電により発生する磁束は図8に示すように主としてステータ歯106aの端面106a1とステータ歯106bの端面106b1とを通過するため、ロータ磁石111に効果的に作用しないのでモータの出力は高くならない欠点がある。
【0007】
特公昭53−2774号の光制御装置及び特開昭57−166847号の中空形モータにおいても上記と同様に、ロータ磁石の外周にステータコイル及びステータヨークが配置されているためモータの外形寸法が大きくなるとともに、ステータコイルへの通電により発生する磁束がロータ磁石に効果的に作用しない。
【0008】
図9に示すものに関しても、ステータ202とステータ203のギャップが小さいところにコイルへの通電で発生する磁束が集中し、効果的にマグネットに作用しない。
【0009】
また、小型モータとしては通常のブラシタイプのコアード直流モータ及びコアレス直流モータがあるが、構成部品が多いため、モータを超小型にすると各構成部品の製造及び組み立てが難しくコストアップを招く欠点がある。
【0010】
更にはコイン型のブラシレスモータがある。例えば特開平7−213041や特開2000−50601で提案されている図10に示すようなものがある。これは、複数のコイル301、302、303と円盤形状のマグネット304で構成されるものであり、コイルは図10に示すように薄型コイン形状でありその軸はマグネットの軸と平行に配置されている。一方、円盤形状のマグネットはその円盤の軸方向に着磁されており、マグネットの着磁面とコイルの軸は対向する様に配置されている。
【0011】
この場合、コイルから発生する磁束は図11中の矢印で示すように完全には有効にマグネットに作用せず、また、マグネットが発生する回転力の中心はモータの外径からLだけ離れた位置となるので、モータの大きさの割には発生するトルクは小さくなってしまう。また、このモータの中心部はコイルやマグネットが占有してしまっているので、モータの中心部を他に利用することは困難である。更には複数のコイルが必要であることから、コイルへの通電制御が複雑になったりコストが高くなる欠点がある。
【0012】
本発明の第1の目的は、製造が簡単で出力の高く取り扱いが容易な小型で薄型の駆動装置を提供することである。
【0013】
また、本発明の第2の目的は、製造が簡単で出力の高く取り扱いが容易な小型で薄型の駆動装置を用いた光量制御装置を提供することである。
【0014】
【課題を解決するための手段】
上記目的を達成するために、請求項1記載の発明は、円筒形状に形成されるとともに少なくとも外周面が周方向にn分割して異なる極に交互に着磁され回転中心を中心として回転可能なマグネットと、該マグネットの軸方向に配置され絶縁材料からなるボビンと、該ボビンに巻回されるコイルと、該コイルにより励磁され該マグネットの外周面に対向する複数の櫛歯形状の外側磁極部と該コイルにより励磁され該マグネットの内周面に対向する中空円柱形状もしくは複数の櫛歯形状の内側磁極部とで構成されるステータと、該マグネット及び該ステータを保持する地板とを備え、該地板は該外側磁極部と該内側磁極部との間の空間で該マグネットの回転嵌合部と嵌合する嵌合部を有し、前記ボビンは前記マグネットの軸方向の第1面を受ける受け部を有し、前記地板は前記マグネットの軸方向の第2面を受ける受け部を有することを特徴とする駆動装置とするものである。
【0015】
また、上記目的を達成するために、請求項2記載の本発明は、前記外側磁極部の櫛歯形状の軸方向長さ及び前記内側磁極部の中空円柱形状もしくは櫛歯形状の軸方向長さは前記マグネットの軸方向端面を超える位置までの長さを有する駆動装置とするものである。
【0017】
また、上記目的を達成するために、請求項3記載の発明は、前記地板は前記ステータを位置決め固定するとともに前記外側磁極部と前記内側磁極部との間隔を規制するステータ嵌合部を有する駆動装置とするものである。
【0018】
また、上記目的を達成するために、請求項4記載の発明は、円筒形状に形成されるとともに少なくとも外周面が周方向にn分割して異なる極に交互に着磁され回転中心を中心として回転可能なマグネットと、該マグネットと軸方向に配置され絶縁材料からなるボビンと、該ボビンに巻回されるコイルと、該コイルにより励磁され該マグネットの外周面に対向する複数の櫛歯形状の外側磁極部と該コイルにより励磁され該マグネットの内周面に対向する中空円柱形状もしくは複数の櫛歯形状の内側磁極部とで構成されるステータと、該マグネット及び該ステータを保持する地板とを備え、該地板が該外側磁極部と該内側磁極部との間の空間で該マグネットの回転嵌合部と嵌合する嵌合部を有する駆動装置と、該マグネットに連結して開閉することで該内側磁極部内の通過光量を制御する光量制御部材と、を備え、前記ボビンは前記マグネットの軸方向の第1面を受ける受け部を有し、前記地板は前記マグネットの軸方向の第2面を受ける受け部を有することを特徴とする光量制御装置とするものである。
【0019】
また、上記目的を達成するために、請求項5記載の本発明は、前記外側磁極部の櫛歯形状の軸方向長さ及び前記内側磁極部の中空円柱形状もしくは櫛歯形状の軸方向長さは前記マグネットの軸方向端面を超える位置までの長さを有することを特徴とする請求項4に記載の光量制御装置とするものである。
【0021】
また、上記目的を達成するために、請求項6記載の本発明は、前記地板は前記ステータを位置決め固定するとともに前記外側磁極部と前記内側磁極部との間隔を規制するステータ嵌合部を有することを特徴とする請求項4に記載の光量制御装置。
【0022】
これら請求項1及び4に記載の構成においては、駆動装置の外径はマグネットの外周面に対向する外側磁極部で決められ、駆動装置の内径はマグネットの内周面に対向する内側磁極部で決められ、駆動装置の軸方向高さはステータ、コイル、マグネットを順に配置することで決められ、駆動装置を非常に小型化することができるものである。また、コイルにより発生する磁束は外側磁極部と内側磁極部との間にあるマグネットを横切るので効果的に作用する。さらに、外側磁極部はマグネットの外周面に所定の角度だけ対向して設けられた軸方向に延出する櫛歯形状により構成されるため、半径方向への凹凸により構成されるものに比べて半径方向に関する寸法は小さく構成できる。これにより、マグネットの外径寸法を大きく構成できるので駆動装置のトルクを大きくできる。さらにまた、ボビンにマグネットの軸方向受け部を設けたことで、別部品としてマグネット押えを設ける必要がなく、小型で安価に構成できる。
【0023】
また、マグネットは外側磁極部と内側磁極部との空間で地板に回転嵌合する構成としたことで、外側磁極部の櫛歯形状の軸方向長さ及び内側磁極部の中空円柱形状もしくは櫛歯形状の軸方向長さは地板の回転嵌合部に影響されず自由に決められる。
【0024】
また、請求項2及び5記載の構成においては、外側磁極部の櫛歯形状の軸方向長さ及び内側磁極部の中空円柱形状の軸方向長さをマグネットの軸方向端面を超える位置までの長さに設定したことで、外側磁極部及び内側磁極部によるマグネットの軸方向にかかる力が緩和され、マグネットとマグネットを軸方向に保持している部材との摺動摩擦が低減してマグネットの回転がスムーズになる。
【0027】
さらに、請求項4記載の構成においては、該駆動装置と、該駆動装置のマグネットに連結して回動することで中空柱形状の内側磁極部内の通過光量を制御する光量制御部材とを備えた光量制御装置とすることで、駆動装置の中央部を光が通過する構成とすることができる。すなわち、駆動装置の形状をドーナツ状のものとすることで、その内側にレンズを配置したり光路として利用でき、また半径方向(ドーナツの幅)に関する寸法を小さく構成できるので、その外側には他の構造物を配置でき、出力が高く、かつ安価で小型の駆動装置を備えた光量制御装置を提供することができる。
【0028】
【発明の実施の形態】
以下、本発明を図示の実施の形態に基づいて詳細に説明する。
図1〜図4は本発明の第1の実施例の光量制御装置を示す図であり、そのうち、図1は駆動装置を備えた光量制御装置の分解斜視図であり、図2は図1の光量制御装置を別の角度から見た分解斜視図であり、図3は光量制御装置の組み立て完成状態の軸方向断面図であり、図4は駆動装置のマグネットの回転動作説明図である。
【0029】
図1から図4において、1はロータを構成する中空円筒形状のマグネットであり、図4に示すようにマグネット1はその外周表面を円周方向にn分割(本実施例では16分割)して、S極・N極が交互に着磁された着磁部1aを有する。マグネット1は射出成形により形成されるプラスチックマグネット材料により形成される。これにより円筒形状の半径方向に関しての厚さ(特に着磁部1aの厚さ)を非常に薄く構成することができる。また、マグネット1には軸方向に突出するダボ1c及び1d、円筒内側に回転嵌合部1eが一体的に形成されている。回転嵌合部1eは後述の地板5の嵌合突起部5eに摺動可能に嵌合して回転可能に支持される。
【0030】
マグネット1は射出成形により形成されるプラスチックマグネットからなるため、ダボ1c及び1d、回転嵌合部1eを有するという複雑な形状でも製造が容易となる。また、回転嵌合部1eはマグネット1で一体成形されることにより、回転中心に対してマグネット部の同軸精度が向上し、振れを少なくするとともに着磁部1aと後述のステータ4との空隙距離を少なくすることが可能となり、充分な出力トルクを得ることができる。また、射出成形マグネットは表面に薄い樹脂皮膜が形成されるため、錆の発生がコンプレッションマグネットに比較して大幅に少ないので、塗装などの防錆処理を廃止できる。さらにコンプレッションマグネットで問題になる磁性粉の付着もなく、防錆塗装時に発生しやすい表面のふくらみもなく、品質の向上が達成できる。
【0031】
マグネット1の材料にはフェライト系磁性粉とナイロンなどの熱可塑性樹脂バインダー材との混合物を射出成形することにより形成されたプラスチックマグネットを用いている。これにより、コンプレッション成形されたマグネットの場合の曲げ強度が500Kgf/cm 2 程度なのに対して、例えばナイロン樹脂をバインダー材として使用した場合1000Kgf/cm 2 以上の曲げ強度が得られ、コンプレッション成形では出来ない薄肉円筒形状に形成することが可能となる。薄肉円筒状に形成することで後述のステータ4の外側磁極と内側磁極との間隔を短く設定することができ、その間の磁気抵抗を小さい磁器回路とすることができる。これにより、後述のコイル2への通電を行った場合、小さな起磁力でも多くの磁束を発生することができ、駆動装置の性能が高まる。
【0032】
2は円筒形状のコイルであり、絶縁材料からなるボビン3に巻き付けられている。コイル2はマグネット1と同心でかつ、マグネット1の軸方向に並んで配置され、その外径はマグネット1の外径とほぼ同じ寸法となっている。ボビン3にはマグネット1の端面1fを軸方向に受ける半球状の受け部3aが円周方向に6ヵ所略等分配置して一体的に形成されている。また、ボビン3には端子用突起3bが設けられ、ここに端子ピン6が2本埋め込まれてコイル2の両端がそれぞれ端子ピン6にからげられる。
【0033】
4は軟磁性材料からなるステータであり、外筒及び内筒とそれらを結ぶ連結部4cとで構成される。ステータ4の外筒はその先端部が軸方向に延出する複数の歯、すなわち櫛歯形状によって構成される。この軸方向に延出する歯の数はマグネット1の着磁分割数nの1/2にて形成され(本実施例では8つ)、これらが外側磁極4aを形成している。外側磁極4aは円周方向に720/n度(本実施例では45度)ずつ等分配置されて形成される。また、ステータ4の内筒は中空柱形状により構成され、内側磁極4bを形成している。この構成により駆動装置の直径を最小限にしつつ磁極の形成が可能となる。すなわち外側磁極を半径方向に延びる凹凸で形成すると、その分駆動装置の直径は大きくなってしまうが、本実施例では軸方向に延出する櫛歯形状により外側磁極を形成しているので、駆動装置の直径を最小限に抑えることができる。
【0034】
ステータ4の外側磁極4aの軸方向に延出する歯の数は本実施例の場合はマグネット1の着磁分割数nの1/2にて形成しているが、これは理想的な歯の数であって、例えば歯の数を1つ減らしても出力が若干落ちる程度で駆動には何ら問題はない。ただし、その場合も残りの歯は円周方向に720/n度ずつ配置する必要がある。すなわち歯の数を間引くことで、そこのスペースを他の部材が利用することも可能である。
【0035】
ステータ4の内側磁極4bは本実施例の場合は単なる中空の円柱形状で構成しているが、外側磁極4a同様に櫛歯形状で構成してもよい。ただし、外側磁極が上に述べた櫛歯形状で構成されるならば、外側磁極と内側磁極の間を通過する磁束は櫛歯状の外側磁極と外側磁極の形状を円柱形状の内側磁極に投影した内側磁極上の位置との間を通過するため、内側磁極の形状は単なる中空の円柱形状のままでもよいのである。
【0036】
ステータ4の外側磁極4a及び内側磁極4bの間にコイル2及びボビン3が接着等により固定され、コイル2に通電されることによりステータ4が励磁される。
【0037】
ステータ4の外側磁極4a及び内側磁極4bはマグネット1の着磁部1aの外周面及び内周面に対向してマグネット1の着磁部1aを所定の隙間を持って挟み込むように設けられる。よってコイル2により発生する磁束は外側磁極4a及び内側磁極4bとの間にあるマグネット1を横切るので、ロータであるマグネット1に効果的に作用し、駆動装置の出力を高める。
【0038】
また、マグネット1は前記したように射出成形により形成されるプラスチックマグネット材料により構成されており、これにより円筒形状の半径方向に関しての厚さは非常に薄く構成することができる。そのため、ステータ4の外側磁極4aと内側磁極4bとの間隔を非常に短くでき、コイル2とステータ4により形成される磁気回路の磁気抵抗を小さく構成できる。これにより少ない電流で多くの磁束を発生させることができ、駆動装置の出力アップ、低消費電力化、コイルの小型化が達成されることになる。
【0039】
5は中央に開口部5bが形成された地板であり、マグネット1は地板5の嵌合突起部5eに回転嵌合部1eが嵌合して回転可能に取り付けられる。ここで、嵌合突起部5eはステータ4が地板5に固定された状態でステータ4の外側磁極4aと内側磁極4bとの間に配置される。すなわち、マグネット1と地板5との嵌合はステータ4の外側磁極4aと内側磁極4bとの空間で行われるため、外側磁極4aや内側磁極4bの軸方向長さは嵌合部に影響されず自由に決められる。
【0040】
ここで、外側磁極4aの櫛歯の軸方向長さはマグネット1の着磁部1aの終端である軸方向端面1gを超える位置までの長さに設定してある。同じく内側磁極4bの中空円柱形状の軸方向長さもマグネット1の着磁部1aの終端である軸方向端面1gを超える位置までの長さに設定してある。これにより、外側磁極4a及び内側磁極4bによるマグネット1の軸方向にかかる力は発生しづらくなるため、マグネット1を軸方向に保持している地板5及ボビン3との摺動摩擦が低減してマグネット1の回転がスムーズになり、駆動装置の出力アップにつながる。
【0041】
また、地板5にはステータ嵌合部5fが設けられ、外側磁極4aの先端と内側磁極4bの先端とがステータ嵌合部5fを間に挟み込むようにしてステータ4が地板5に嵌合固定される。この時、マグネット1とステータ4とは同軸になるように位置決め固定される。よって、ステータ4の外側磁極4aと内側磁極4bとの間隔は地板5のステータ嵌合部5fで規制されるため、外側磁極4aと内側磁極4bとの間に配置されるマグネット1の外周面と外側磁極4a及びマグネット1の内周面と内側磁極4bとのクリアランスが一定に保たれやすい。そのため、ステータ4の外側磁極4aとマグネット1との間隔及びステータ4の内側磁極4bとマグネット1との間隔を非常に短くでき、駆動装置の出力アップが達成されることになる。
【0042】
マグネット1の軸方向の受けは、一方の端面1gは地板5に円周方向に6ヵ所略等分配置して一体的に設けられた半球状の受け部5gで行い、もう一方の端面1fはボビン3に一体的に設けられた半球状の受け部3aで行う。よって、別部品としてマグネット押えを設ける必要がなく、小型で安価に構成できる。
【0043】
さらに、地板5にはマグネット1のダボ1c及び1dと同一方向に突出するダボ5c及び5dが一体で形成されるとともに、マグネット1のダボ1c及び1dが同時に当接することでマグネット1の回転角を規制する長穴部5h及び5iが形成されている。すなわちマグネット1はダボ1c及び1dがそれぞれ長穴部5h及び5iの一端に当接する位置から他端に当接する位置まで回転可能となる。
【0044】
以上、マグネット1、コイル2、ボビン3、ステータ4、地板5、端子ピン6により本実施例の光量制御装置の駆動装置が構成される。
【0045】
7及び8は羽根であり、羽根7の丸穴7aが地板5のダボ5cに回転可能に嵌合し、羽根7の長穴7bがマグネット1のダボ1cに摺動可能に嵌合し、羽根8の丸穴8aが地板5のダボ5dに回転可能に嵌合し、羽根8の長穴8bがマグネット1のダボ1dに摺動可能に嵌合する。
【0046】
9は中央に開口部9aが形成された羽根押えであり、羽根7及び羽根8を所定の隙間を持って間に挟んで地板5に固定され、羽根7及び羽根8の軸方向の受けとなる。
【0047】
マグネット1の回転により羽根7は長穴7bがマグネット1のダボ1cに押されて丸穴7aを中心に回転し、羽根8は長穴8bがマグネット1のダボ1dに押されて丸穴8aを中心に回転して地板5の開口部5bの通過光量を制御するよう構成されている。
【0048】
10はトーションスプリングからなる閉じスプリングであり、閉じスプリング10の一方の足は羽根押え9に掛けられ、他方の足はマグネット1のダボ1cの先端に掛けられて、マグネット1に連結する羽根7及び羽根8が開口部5bを閉じる方向に回転するようマグネット1を付勢している。
【0049】
以上、マグネット1、コイル2、ボビン3、ステータ4、地板5、端子ピン6、羽根7及び8、羽根押え9、閉じスプリング10により本実施例の光量制御装置が構成される。
【0050】
11は不図示の撮影レンズの一部が固定される鏡筒であり、羽根押え9はマグネット1、コイル2、ボビン3、ステータ4、地板5、端子ピン6から成る駆動装置と羽根7及び8を間に挟んで鏡筒11に固定される。この状態で鏡筒11はステータ4の地板5からの抜け止めの役割を果たす。
【0051】
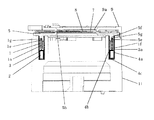
図3は図1に示す駆動装置を備えた光量制御装置の組み立て完成状態の軸方向断面図であり、図4(a)、(b)は駆動装置のマグネットの回転動作説明図である。
【0052】
図4(a)はマグネット1のダボ1c及びダボ1dがそれぞれ地板5の長穴部5h及び長穴部5iの一端に当接している状態であり、図4(b)はマグネット1のダボ1c及びダボ1dがそれぞれ地板5の長穴部5h及び長穴部5iの他端に当接している状態である。マグネット1はコイル2への無通電時には閉じスプリング10の付勢力により図4(a)の状態に保持される。また、マグネット1はコイル2への所定の電流通電時には閉じスプリング10の付勢力に抗して図4(b)の状態に保持される。
【0053】
この様子を図4、図5及び図6を用いて説明する。図5はコギングトルクの様子を表すグラフであり、コイル2への通電がない状態でマグネット1の回転位置とマグネット1が外側磁極4aにより吸引される様子を示している。
【0054】
図5において縦軸はマグネット1に作用するステータ4との間で発生する磁力を表し、横軸はマグネット1の回転位相を表す。E1点,E2点で示されるところは正回転しようとするとマイナスの力が働いて元の位置に戻ろうとし、逆回転しようとするとプラスの力が働いて元の位置に戻される。すなわちマグネットと外側磁極の間の磁力の力によってマグネットがE1点或いはE2点に安定的に位置決めされようとするコギングの位置である。F1点,F2点,F3点はマグネットの位相が少しでもずれると前後のE1点或いはE2点の位置に回転する力が働く不安定な均衡状態にある停止位置である。コイル2への通電がなされない状態では、振動や姿勢の変化によってF1点,F2点,F3点に停止していることはなく、E1点或いはE2点の位置で停止する。
【0055】
E1点,E2点のようなコギング安定点はマグネットの着磁極数をnとすると、360/n度の周期で存在し、その中間位置がF1点,F2点,F3点のような不安定点になる。
【0056】
有限要素法による数値シミュレーションの結果、着磁される極の角度と外側磁極のマグネットに対向する角度との関係により、コイルへの通電がない状態での外側磁極とマグネットとの吸引状態の様子が変化することが明らかになった。それによると、外側磁極のマグネットに対向する角度によりマグネットのコギング位置が変化する。すなわち、外側磁極のマグネットに対向する角度が所定値以下の場合にはマグネットの極の中心が外側磁極の中心に対向する位置で安定的に保持される。この時、図5で述べたE1点及びE2点がマグネットの極の中心が外側磁極の中心に対向する位置となる。逆に、外側磁極のマグネットに対向する角度が所定値以上の場合にはマグネットの極と極の境界が外側磁極の中心に対向する位置で安定的に保持される。この時、図5で述べたE1点及びE2点がマグネットの極と極の境界が外側磁極の中心に対向する位置となる。その様子を図6で詳しく説明する。
【0057】
図6は外側磁極の幅寸法とコギングトルク、マグネット寸法の関係を表すグラフである。図6において、横軸は(マグネットの厚み/マグネット1極あたりの外周長さ)、縦軸は(外側磁極1つあたりのマグネットに対する対向角度/マグネット1極あたりの角度)である。
【0058】
例えば、マグネットの外径寸法が10mm、内径寸法が9mmで極数が16極の場合、マグネットの厚みは(10−9)/2、磁極1極あたりの外周長さは10×π/16であるから横軸の(マグネットの厚み/マグネット1極あたりの外周長さ)の値は0.255となる。また、外側磁極1つあたりのマグネットに対する対向角度を13.65度とすると、マグネット1極あたりの角度は22.5度であるから縦軸の(外側磁極1つあたりのマグネットに対する対向角度/マグネット1極あたりの角度)は0.607となる。
【0059】
図6中の各ポイントはコギングトルクがほぼ0となるようなモデルの(外側磁極1つあたりのマグネットに対する対向角度/マグネット1極あたりの角度)をプロットしたものである。縦軸をY、横軸をXとするとこれらのポイントは直線Y=−0.327X+0.69の式で近似できる。ここで、Y<−0.327X+0.69ならばマグネットの極の中心が外側磁極の中心に対向する位置で安定的に保持され、Y>−0.327X+0.69ならばマグネットの極と極の境界が外側磁極の中心に対向する位置で安定的に保持される。
【0060】
つまり、Y=−0.327X+0.69は次のように表される。上記各外側磁極のマグネットに対する各対向角をA度、着磁極数をn、マグネットの外径寸法をD1、マグネットの内径寸法をD2とすると、A=(248.4/n)−58.86×(D1−D2)/(D1×π)となる。すなわち、A=(248.4/n)−58.86×(D1−D2)/(D1×π)となるように設定しておけばコギングトルクがほぼ0に近い値となる。
【0061】
例えば、マグネット1の着磁極数nを16、マグネット1の外径寸法D1を10mm、マグネット1の内径寸法D2を9mmと設定すると、(248.4/n)−58.86×(D1−D2)/(D1×π)=13.65度となり、各外側磁極のマグネットに対する対向角A度を13.65度にすればY=−0.327X+0.69の条件に当てはまることになる。
【0062】
ここで、外側磁極4aのマグネット1に対する各対向角A度は部品寸法公差や嵌合ガタ等を考慮して設定するのが望ましい。すなわち上記の場合、例えば外側磁極4aのマグネット1に対する各対向角A度を13.65度と設定しても、理論上はコギングトルクがほぼ0に近い値となるが、部品寸法公差や嵌合ガタ等を考慮すると、コギングトルクがほぼ0に近い値となる保証は少ない。
【0063】
また、本実施例では羽根が閉じた状態で安定的に位置保持するため閉じスプリング10を組み込んでいるが、部品寸法公差や嵌合ガタ等によりマグネットの極と極の境界が外側磁極の中心に対向する位置で保持力が働くと、羽根7及び8の開閉の中間位置で停止しようとする力が働くことになるため、閉じスプリング10のバネ力を強める必要が生じ、閉じスプリング10の付勢力に攻して羽根7及び8の開き方向に回転するマグネット1の回転力に影響する。そこで、もう少し余裕を持って対向角A度を設定する必要がある。すなわちA=(248.4/n)−58.86×(D1−D2)/(D1×π)で決められる対向角A度よりも若干小さい値とすることで、マグネットの極の中心が外側磁極の中心に対向する位置に保持されるが、そのコギング力は小さい値とすることができる。よって本実施例では対向角A度を13.5度としている。
【0064】
マグネットに着磁された極と極の境界が外側磁極の中心に対向する位置にある時、コイルへ通電をして外側磁極を励磁すると、必ずマグネットには回転力が生じ、起動が行われる。しかし、マグネットに着磁された極の中心が外側磁極の中心に対向する位置にある時は、コイルへ通電をして外側磁極を励磁してもマグネットに回転力は生じない。
【0065】
本実施例では外側磁極4aのマグネット1に対向する角度をA度、マグネット1の外径寸法をD1、マグネット1の内径寸法D2とすると、部品寸法公差や嵌合ガタ等を考慮してA<(248.4/n)−58.86×(D1−D2)/(D1×π)となるように各値を設定した。これは、図5に示す直線で示す部分より左下にある場合に相当する。ここで、コイル2への通電がない状態では、上記E1点及びE2点がマグネット1の極の中心が外側磁極4aの中心に対向する位置に相当し、安定的にこの位置に停止する。しかし、この状態からコイル2へ通電をして外側磁極4aを励磁しても、マグネット1に回転力が生じない。
【0066】
そこで、本実施例では図4(a)のように地板5にマグネット1の回転規制のための長穴部5h、5iを設け、マグネット1のダボ1c、1dが長穴部5h、5iの一端に当接している状態で、回転中心1fを中心としてマグネット1の極の中心と外側磁極4aの中心とのなす角度がα度になるように設定してある。これにより、図4(a)の状態からコイル2へ通電して外側磁極4aを励磁すると、マグネット1に回転力が生じて、安定して起動が行われる。
【0067】
また、図4(a)の状態を図5に当てはめると、G点の位置となる。この位置でのコギングトルク(マグネット1に作用するステータ4との間で発生する吸引力)はT2であり、これは、E1点に戻ろうとする回転方向にマイナスの力(図4において半時計方向の力)が働くことになる。すなわち、マグネット1のダボ1c、1dが地板5の長穴部5h、5iの一端に当接する位置の保持力がT2となる。よって、コイル2への無通電時にはマグネット1は保持力T2によりこの位置(図4(a)の位置)に停止しようとするとともに、マグネット1には閉じスプリング10が掛けられており、この閉じスプリング10の付勢力によってもこの位置に安定的に停止する。
【0068】
同様に、本実施例では図4(b)のようにマグネット1のダボ1c、1dが長穴部5h、5iの他端に当接している状態で、回転中心1fを中心としてマグネット1の極の中心と外側磁極4aの中心とのなす角度がβ度になるように設定してある。これにより、図4(b)の状態からコイル2へ通電して外側磁極4aを励磁すると、マグネット1に回転力が生じて、安定して起動が行われる。
【0069】
また、図4(b)の状態を図5に当てはめると、H点の位置となる。この位置でのコギングトルク(マグネット1に作用するステータ4との間で発生する吸引力)はT1であり、これは、E2点に進もうとする回転方向にプラスの力(図4において時計方向の力)が働くことになる。すなわち、マグネット1のダボ1c、1dが地板5の長穴部5h、5iの他端に当接する位置の保持力がT1となる。よって、コイル2への無通電時にはマグネット1は保持力によりこの位置(図4(b)の位置)に停止しようとするが、マグネット1には閉じスプリング10が掛けられており、本実施例ではコギング力が小さくなる(保持力T1も小さくなる)ように外側磁極4aのマグネット1に対する各対向角A度を設定しているので、閉じスプリング10の付勢力により図4(a)の状態に戻される。
【0070】
次に、駆動装置のマグネット1の回転動作の様子を図4で説明する。
上記のごとく、コイル2への無通電時にはマグネット1は図4(a)の位置で安定的に停止している。図4(a)の状態からコイル2に通電して、ステータ4の外側磁極4aをS極とし、内側磁極4bをN極に励磁すると、外側磁極4aと内側磁極4bの励磁によりマグネット1は回転方向の電磁力を受け、ロータであるマグネット1は閉じスプリング10の付勢力に攻して時計方向にスムーズに回転し始める。そして所定の時間が経過すると回転角度がK度となる図4(b)に示す状態になる。コイル2への通電を続ける限り図4(b)の位置を保持する。
【0071】
次に、コイル2への通電を反転させ、ステータ4の外側磁極4aをN極とし、内側磁極4bをS極に励磁すると、外側磁極4aと内側磁極4bの励磁によりマグネット1は回転方向の電磁力を受けるとともに、閉じスプリング10の付勢力を受けて、ロータであるマグネット1は反時計方向に勢いよく回転し始める。そして所定の時間が経過すると回転角度がK度となる図4(a)に示す状態になる。ここでコイル2への通電を断つ。図4(a)に示す状態は図5におけるG点であるから上記のごとくコキング力T2及び閉じスプリング10の付勢力によりマグネット1は安定的にこの位置を保持する。実際にはコイル2への逆通電を行わなくても閉じスプリング10の付勢力だけで図4(a)に示す状態までマグネット1は回転するが、コイル2への逆通電を行うことにより、より素早く回転可能となる。
【0072】
以上のようにコイル2への通電方向を切り換えることにより、ロータであるマグネット1は図4(a)の状態と図4(b)の状態とに切り換わる。
【0073】
上記に示したように羽根7及び羽根8はマグネット1に連動して回転する。マグネット1が図4(a)の状態にある時、羽根7及び羽根8はそれぞれ地板5の開口部5bを閉鎖する位置にある。一方、マグネット1が図4(b)の状態にある時、羽根7及び羽根8は地板5の開口部5bから完全に退避する。よって、コイル2への通電方向を切り換えることにより、羽根7及び羽根8の位置を開放位置と閉鎖位置とに制御可能となり、地板5の開口部5bの通過光量を制御できる。
【0074】
また、マグネット1が図4(a)の状態から図4(b)の状態へと切り換わる途中でコイル2への通電方向を切り換えることも可能である。すなわち、地板5の開口部5bの通過光量を時間的に調節可能となる。
【0075】
さらに、コイル2への無通電時にはマグネット1と外側磁極4aとの吸引力及び閉じスプリング10の付勢力により閉鎖位置が安定保持される。また、図4(b)の状態であってもコイル2への通電を止めると閉じスプリング10の付勢力により閉鎖位置に戻され、そこで安定保持される。よって、無通電状態では振動等により羽根7及び羽根8が開くことはなく、光量制御装置の信頼性がUPする。
【0076】
したがって、本実施例の光量制御装置は、閉じ位置では無通電で安定して保持でき、コイルの通電方向及び時間を制御することで通過光量を制御可能なシャッタ装置として作用する。
【0077】
ここで、このような構成の駆動装置が、出力が高くて超小型化になる上で最適な構成であることについて述べる。
本実施例の駆動装置の基本構成について述べると、
第1にマグネットを中空の円筒形状に形成していること
第2にマグネットの外周面を周方向にn分割して異なる極に交互に着磁していること
第3にマグネットの軸方向にコイルをならべて配置していること
第4にコイルにより励磁されるステータの外側磁極及び内側磁極をそれぞれマグネットの外周面及び内周面に対向させていること
第5にステータの外側磁極を軸方向に延出する櫛歯により構成していること
第6にステータの内側磁極を中空円柱形状にすることで、アクチュエータの形状をドーナツ状のものとしていること
第7に地板とマグネットとの回転嵌合を外側磁極と内側磁極との空間で行なっていること
第8に外側磁極の軸方向に延出する櫛歯の長さ及び内側磁極の中空柱形状の長さを対向するマグネットの軸方向端面を超える位置までの長さに設定していること、
第9にマグネットの軸方向両端の受けをボビンと地板に設けていること、
第10にステータを地板に位置決め固定する嵌合部が外側磁極と内側磁極との間隔を規制するような構成としていることである。
【0078】
この駆動装置の径はマグネットの径にステータの磁極を対向させるだけの大きさがあればよく、また、駆動装置の高さはステータの板厚にマグネットの高さとコイルの高さを加えただけの高さがあればよいことになる。このため駆動装置の大きさは、ステータの板厚とマグネット及びびコイルの径と高さによって決まるので、ステータの板厚とマグネット及びコイルの径と高さをそれぞれ非常に小さくすれば駆動装置を超小型にすることができる。
【0079】
ここで、マグネット及びコイルの径と高さをそれぞれ非常に小さくすると、駆動装置としての精度を維持することが難しくなるが、本実施例ではマグネットを中空の円筒形状に形成し、この中空の円筒形状に形成されたマグネットの外周面および内周面にステータの外側磁極及び内側磁極を対向させるという単純な構造により駆動装置の精度の問題を解決している。ここで、マグネットの外周面だけでなく、マグネットの内周面も円周方向に分割して着磁すれば、駆動装置の出力を更に高めることができる。
【0080】
コイルにより発生する磁束は外側磁極と内側磁極との間にあるマグネットを横切るので効果的に作用する。
【0081】
外側磁極は軸方向に延出する櫛歯形状により構成されるため、半径方向への凹凸により構成されるものに比べて半径方向に関する寸法は小さく構成できる。これにより、マグネットの外径寸法を大きく構成できるので駆動装置のトルクを大きくできる。
【0082】
マグネットの外周面に対向する外側磁極の櫛歯形状の各対向角をA度、マグネットの着磁極数をn、マグネットの外径寸法をD1、マグネットの内径寸法をD2とすると、A<(248.4/n)−58.86×(D1−D2)/(D1×π) となるように設定したことで、マグネットに着磁された極の中心が外側磁極の櫛歯の中心に対向する位置で保持される。本実施例ではこのコギング安定位置からα度ずれた位置、及びそこからK度回転した位置であって次のコギング安定位置からβ度ずれた位置とに回転規制を設け、マグネット1に閉じスプリング10を掛けることで、コイル2への無通電時にマグネット1と外側磁極4aとの吸引力と閉じスプリング10の付勢力とによりマグネット1の回転位置が羽根閉じ状態位置で安定的に保持されるとともに、コイル2への通電方向の切り換えによりマグネット1はそれぞれの回転規制位置へと切り換わる。
【0083】
コイル2は1つで構成されるので通電の制御回路も単純になり、コストも安く構成できる。
【0084】
マグネット1と地板5との嵌合はステータ4の外側磁極4aと内側磁極4bとの空間で行われるため、外側磁極4aや内側磁極4bの軸方向長さは嵌合部に影響されず自由に決められる。
【0085】
外側磁極4aの櫛歯の軸方向長さ及び内側磁極4bの中空円柱形状の軸方向長さをマグネット1の着磁部1aの終端である軸方向端面1gを超える位置までの長さに設定したことで、外側磁極4a及び内側磁極4bによるマグネット1の軸方向にかかる力が緩和され、マグネット1とマグネット1を軸方向に保持しているボビン3及び地板5との摺動摩擦が低減してマグネットの回転がスムーズになる。
【0086】
マグネット1の軸方向の受けは、一方の端面1gは地板5で受け、もう一方の端面1fはボビン3で受けることで、別部品としてマグネット押えを設ける必要がなく、小型で安価に構成できる。
【0087】
ステータ4を地板5に位置決め固定するステータ嵌合部5fが外側磁極4aと内側磁極4bとの間隔を規制するような構成としていることで、外側磁極4aと内側磁極4bとの間に配置されるマグネット1の外周面と外側磁極4a及びマグネット1の内周面と内側磁極4bとのクリアランスが一定に保たれやすい。そのため、ステータ4の外側磁極4aとマグネット1との間隔及びステータ4の内側磁極4bとマグネット1との間隔を非常に短くでき、駆動装置の出力アップが達成される。
【0088】
マグネット1に連結して羽根7及び羽根8が開閉することで中空円柱形状の内側磁極4bの内側に設けられた地板5の開口部5bの通過光量を制御する光量制御装置とすることで、アクチュエータの中央部を光が通過する構成とすることができる。すなわち、アクチュエータの形状をドーナツ状のものとすることで、その内側にレンズを配置したり光路として利用できる。
【0089】
また、アクチュエータの半径方向(ドーナツの幅)に関する寸法はステータ4の外側磁極4aとマグネット1の着磁部1aとステータ4の内側磁極4bとで決まるため幅を小さく構成でき、光量制御装置のアクチュエータ部の外側には他の構造物を配置可能となる。
【0090】
以上により、出力が高く、かつ安価で小型のアクチュエータを備えた光量制御装置を提供することができる。
【0091】
(発明と実施の形態の対応)
上記実施の形態において、図1,図2,図3のマグネット1及び図4の着磁部1aが本発明のマグネットに相当し、図1,図2,図3のコイル2が本発明のコイルに相当し、図1,図2,図3,図4の外側磁極4aが本発明の外側磁極部に相当し、図1,図2,図3,図4の内側磁極4bが本発明の内側磁極部に相当し、図1,図2,図3の回転嵌合部1eが本発明のマグネットの回転嵌合部に相当し、図2,図3の嵌合突起部5eが本発明の地板の嵌合部に相当し、図3のマグネット1の端面1fが本発明のマグネットの軸方向の第1面に相当し、図3のマグネット1の端面1gが本発明のマグネットの軸方向の第2面に相当し、図2,図3のステータ嵌合部5fが本発明の地板のステータ嵌合部に相当し、図1,図2,図3の羽根7及び羽根8が本発明の光量制御部材に相当する。
【0092】
(変形例)
上記実施の形態においては、アクチュエータが2枚の羽根を開閉する光量制御装置としたが、羽根の枚数は1枚でも3枚以上でもよい。
また、羽根の状態を開放状態と閉鎖状態の2位置に切り換えるシャッター装置としたが、例えば羽根を開放状態と小絞り状態の2位置に切り換える可変絞り装置としてもよいし、フィルターの出し入れ切り換え装置としてもよい。
また、無通電時に羽根の閉じ状態を保持するための閉じスプリングを設ける構成としたが、閉じスプリングをなくして、コギング力だけで羽根の閉じ状態を保持する構成としてもよい。
【0093】
【発明の効果】
以上説明したように、本発明によれば、駆動装置の外径はマグネットの外周面に対向する外側磁極部で決められ、駆動装置の内径はマグネットの内周面に対向する内側磁極部で決められ、駆動装置の軸方向高さはステータ、コイル、マグネットを順に配置することで決められる。このため、駆動装置の大きさはステータの厚み及びコイルとマグネットの径と高さによって決まるもので、ステータの厚み及びコイルとマグネットの径と高さをそれぞれ非常に小さくすれば、駆動装置を非常に小型化することができるものである。
【0094】
また、コイルにより発生する磁束は外側磁極部と内側磁極部との間にあるマグネットを横切るので効果的に作用する。さらに、外側磁極部はマグネットの外周面に所定の角度だけ対向して設けられた軸方向に延出する櫛歯形状により構成されるため、半径方向への凹凸により構成されるものに比べて半径方向に関する寸法は小さく構成できる。これにより、その分マグネットの外径寸法を大きく構成できるので、駆動装置のトルクを大きくできる。
【0095】
また、コイルは1つで構成されるので通電の制御回路も単純になり、コストも安く構成できる。
【0096】
また、マグネットは外側磁極部と内側磁極部との空間で地板に回転嵌合する構成としたことで、外側磁極部の櫛歯形状の軸方向長さ及び内側磁極部の中空円柱形状もしくは櫛歯形状所の軸方向長さは地板の回転嵌合部に影響されず自由に決められる。
【0097】
また、外側磁極部の櫛歯形状の軸方向長さ及び内側磁極部の中空円柱形状もしくは櫛歯形状の軸方向長さをマグネットの軸方向端面を超える位置までの長さに設定したことで、外側磁極部及び内側磁極部によるマグネットの軸方向にかかる力が緩和され、マグネットとマグネットを軸方向に受けているボビンとの摺動摩擦が低減してマグネットの回転がスムーズになる。
【0098】
また、ボビンにマグネットの軸方向受け部を設けたことで、別部品としてマグネット押えを設ける必要がなく、小型で安価に構成できる。
【0099】
また、ステータは地板に固定される際、外側磁極部と内側磁極部との間隔を規制するステータ嵌合部に位置決め固定されることで、外側磁極部と内側磁極部との間に配置されるマグネットの外周面と外側磁極部及びマグネットの内周面と内側磁極部とのクリアランスが一定に保たれやすい。よって、マグネットの外周面と外側磁極部及びマグネットの内周面と内側磁極部とのクリアランスを詰めることが可能となり、駆動装置のトルクUPが図れる。
【0100】
また、駆動装置と、駆動装置のマグネットに連結して回動することで内側磁極部内の通過光量を制御する光量制御部材とを備えた光量制御装置とすることで、駆動装置の中央部を光が通過する構成とすることができる。すなわち、駆動装置の形状をドーナツ状のものとすることで、その内側にレンズを配置したり光路として利用でき、また半径方向(ドーナツの幅)に関する寸法を小さく構成できるので、その外側には他の構造物を配置でき、出力が高く、かつ安価で小型の駆動装置を備えた光量制御装置を提供することができる。
【図面の簡単な説明】
【図1】図1は本発明に係る駆動装置を備えた光量制御装置の分解斜視図である。
【図2】図2は図1の光量制御装置を別の角度から見た分解斜視図である。
【図3】図3は図1に示す光量制御装置の組み立て完成状態の軸方向断面図である。
【図4】図4は本発明に係る駆動装置のマグネットの回転動作説明図である。
【図5】図5はコギングトルクの様子を表すグラフである。
【図6】図6は外側磁極の幅寸法とコギングトルク、マグネット寸法の関係を表すグラフである。
【図7】図7は従来のステップモータの断面図である。
【図8】図8は従来のステップモータのステータの様子を示す断面図である。
【図9】図9は別の従来のステップモータの平面図である。
【図10】図10は従来のブラシレスモータの斜視構成図である。
【図11】図11は従来のブラシレスモータの断面図である。
【符号の説明】
1 ・・・ マグネット
1a ・・・ 着磁部
2 ・・・ コイル
3 ・・・ ボビン
4 ・・・ ステータ
4a ・・・ 外側磁極
4b ・・・ 内側磁極
5 ・・・ 地板
6 ・・・ 端子ピン
7,8 ・・・ 羽根
9 ・・・ 羽根押え
10 ・・・ 閉じスプリング
11 ・・・ 鏡筒
Claims (6)
- 円筒形状に形成されるとともに少なくとも外周面が周方向にn分割して異なる極に交互に着磁され回転中心を中心として回転可能なマグネットと、該マグネットの軸方向に配置され絶縁材料からなるボビンと、該ボビンに巻回されるコイルと、該コイルにより励磁され該マグネットの外周面に対向する複数の櫛歯形状の外側磁極部と該コイルにより励磁され該マグネットの内周面に対向する中空円柱形状もしくは複数の櫛歯形状の内側磁極部とで構成されるステータと、該マグネット及び該ステータを保持する地板とを備え、該地板は該外側磁極部と該内側磁極部との間の空間で該マグネットの回転嵌合部と嵌合する嵌合部を有し、前記ボビンは前記マグネットの軸方向の第1面を受ける受け部を有し、前記地板は前記マグネットの軸方向の第2面を受ける受け部を有することを特徴とする駆動装置。
- 前記外側磁極部の櫛歯形状の軸方向長さ及び前記内側磁極部の中空円柱形状もしくは櫛歯形状の軸方向長さは前記マグネットの軸方向端面を超える位置までの長さを有することを特徴とする請求項1に記載の駆動装置。
- 前記地板は前記ステータを位置決め固定するとともに前記外側磁極部と前記内側磁極部との間隔を規制するステータ嵌合部を有することを特徴とする請求項1に記載の駆動装置。
- 円筒形状に形成されるとともに少なくとも外周面が周方向にn分割して異なる極に交互に着磁され回転中心を中心として回転可能なマグネットと、該マグネットと軸方向に配置され絶縁材料からなるボビンと、該ボビンに巻回されるコイルと、該コイルにより励磁され該マグネットの外周面に対向する複数の櫛歯形状の外側磁極部と該コイルにより励磁され該マグネットの内周面に対向する中空円柱形状もしくは複数の櫛歯形状の内側磁極部とで構成されるステータと、該マグネット及び該ステータを保持する地板とを備え、該地板が該外側磁極部と該内側磁極部との間の空間で該マグネットの回転嵌合部と嵌合する嵌合部を有する駆動装置と、該マグネットに連結して開閉することで該内側磁極部内の通過光量を制御する光量制御部材と、を備え、前記ボビンは前記マグネットの軸方向の第1面を受ける受け部を有し、前記地板は前記マグネットの軸方向の第2面を受ける受け部を有することを特徴とする光量制御装置。
- 前記外側磁極部の櫛歯形状の軸方向長さ及び前記内側磁極部の中空円柱形状もしくは櫛歯形状の軸方向長さは前記マグネットの軸方向端面を超える位置までの長さを有することを特徴とする請求項4に記載の光量制御装置。
- 前記地板は前記ステータを位置決め固定するとともに前記外側磁極部と前記内側磁極部との間隔を規制するステータ嵌合部を有することを特徴とする請求項4に記載の光量制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001348309A JP3950673B2 (ja) | 2001-11-14 | 2001-11-14 | 駆動装置及び光量制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001348309A JP3950673B2 (ja) | 2001-11-14 | 2001-11-14 | 駆動装置及び光量制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003153520A JP2003153520A (ja) | 2003-05-23 |
| JP3950673B2 true JP3950673B2 (ja) | 2007-08-01 |
Family
ID=19161149
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001348309A Expired - Fee Related JP3950673B2 (ja) | 2001-11-14 | 2001-11-14 | 駆動装置及び光量制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3950673B2 (ja) |
-
2001
- 2001-11-14 JP JP2001348309A patent/JP3950673B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003153520A (ja) | 2003-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4455407B2 (ja) | 駆動装置 | |
| KR100426744B1 (ko) | 구동장치, 광량제어장치 및 셔터 | |
| US6858959B2 (en) | Motor and light amount adjusting apparatus | |
| JP4401696B2 (ja) | 駆動装置、光量調節装置およびレンズ駆動装置 | |
| JP2002049076A (ja) | 光量調整装置 | |
| JP3950756B2 (ja) | 駆動装置及び光量調節装置 | |
| JP3977178B2 (ja) | レンズ駆動装置 | |
| KR100426745B1 (ko) | 구동장치 및 광량제어장치 | |
| JP4021077B2 (ja) | アクチュエータ | |
| JP3950673B2 (ja) | 駆動装置及び光量制御装置 | |
| JP3684164B2 (ja) | 駆動装置及び光量制御装置 | |
| JP3684165B2 (ja) | 駆動装置及び光量制御装置 | |
| JP2004054232A (ja) | 駆動装置、光量調節装置、および、レンズ駆動装置 | |
| JP4065531B2 (ja) | 駆動装置 | |
| JP4497884B2 (ja) | 駆動装置 | |
| JP4006234B2 (ja) | ステッピングモータ | |
| JP2002345225A (ja) | 駆動装置及び光量制御装置 | |
| JP2004064876A (ja) | ステッピングモータ及び光学装置 | |
| JP2002345226A (ja) | 駆動装置及び光量制御装置 | |
| JP4034401B2 (ja) | ムービングマグネット型モータ | |
| JPH09152645A (ja) | カメラ用開閉機構の駆動用モータ | |
| JP4237850B2 (ja) | アクチュエータ | |
| JP2004064875A (ja) | ステッピングモータ及び光学装置 | |
| JP3870195B2 (ja) | 駆動装置および光量調節装置 | |
| JP2005328641A (ja) | 駆動装置及び光量調節装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041015 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20061219 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070104 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070227 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070410 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070423 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110427 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130427 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130427 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140427 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |