JP3877116B2 - 車両の表示装置 - Google Patents
車両の表示装置 Download PDFInfo
- Publication number
- JP3877116B2 JP3877116B2 JP25331399A JP25331399A JP3877116B2 JP 3877116 B2 JP3877116 B2 JP 3877116B2 JP 25331399 A JP25331399 A JP 25331399A JP 25331399 A JP25331399 A JP 25331399A JP 3877116 B2 JP3877116 B2 JP 3877116B2
- Authority
- JP
- Japan
- Prior art keywords
- display
- vehicle
- obstacle
- image
- driver
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Instrument Panels (AREA)
- Traffic Control Systems (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Description
【発明の属する技術分野】
本発明は、車両の表示装置に関し、例えば、代表的な車両である自動車に搭載して好適な表示装置に関する。
【0002】
【従来の技術】
従来より、夜間や濃霧等の視認性が悪い走行環境におけるドライバへの運転支援を行うべく、赤外線を利用して撮影した車両前方の画像を、運転席前方に設けられたディスプレイに表示させる技術が、例えば、特開昭60−231193号、特開平6−247184号、或いは特開平10−230805号等に提案されている。
【0003】
【発明が解決しようとする課題】
これら従来例に提案されている表示装置によれば、ドライバの視覚を有効に補助することができるが、撮影された赤外線画像が、周囲の走行環境に関らず常に表示されることはドライバの運転操作にかえって悪影響を与えることも予想される。
【0004】
そこで本発明は、走行環境に応じて赤外線画像を的確に表示する車両の表示装置の提供を目的とする。
【0005】
【課題を解決するための手段】
上記の目的を達成するため、本発明に係る車両の表示装置は、以下の構成を特徴とする。
【0006】
即ち、車両に設けられ、その車両の前方を赤外線を利用して撮影する撮影装置と、前記撮影装置によって撮影された画像を、該車両の運転席前方に表示する表示器と、前記車両の前方に存在する障害物を検出すると共に、その障害物と該車両との距離を検出する検出手段と、前記検出手段によって検出された障害物と前記車両との距離が所定値より短くなったときに、前記撮影装置により撮影された画像を前記表示器に表示させる表示制御手段と、前記車両のステアリングホイールの操舵反力を調整する調整手段とを備え、前記表示制御手段は、前記表示器への画像表示を開始したときは、前記検出手段によって検出された前記障害物の画像の表示開始に伴うドライバの急ハンドル操作を防止すべく所定時間に限り、該所定時間外における操舵反力よりも大きな操舵反力を前記調整手段に出力させることを備えることを特徴とする。
【0007】
また、例えば、音声ガイダンスを出力する音声出力手段を更に備え、前記表示制御手段は、前記撮影装置により撮影された画像を前記表示器に表示させるのに先立って、前記画像の表示を開始する旨の音声ガイダンスを、前記音声出力手段に出力させることを特徴とする。
【0008】
また、例えば前記表示制御手段は、前記表示器への画像表示を開始してから前記所定時間以内であっても、操舵速度が所定値以上かつ操舵量が所定値以上のときには、前記調整手段による前記所定時間外における操舵反力よりも大きな操舵反力の出力を禁止することを特徴とする。
【0011】
【発明の効果】
上記の本発明によれば、走行環境に応じて赤外線画像を的確に表示する車両の表示装置の提供が実現する。
【0014】
請求項1に係る発明によれば、前方の離間距離が所定値以下となる障害物の画像の表示が急に開始されることによりドライバが驚いたとしても、ドライバの誤った急ハンドル操作を効果的に防止することができる。
【0016】
【発明の実施の形態】
以下、本発明に係る車両の表示装置を、代表的な車両である自動車に適用した実施形態として、図面を参照して詳細に説明する。
【0017】
[第1の実施形態]
図1は、本発明の第1の実施形態における車両の表示装置のブロック構成図である。
【0018】
同図において、2は、自車両前方の障害物との距離を一般的な手法で検出するCCD(Charge Coupled Device)カメラ、レーザレーダ、或はミリ波レーダ等の障害物センサである。3は、自車両前方の環境を赤外線を用いて撮影する赤外光(赤外線)カメラである。
【0019】
4は、例えば車室内の計器パネルに設けられ、ドライバの頭顔位置を検出する頭顔位置検出ユニットであり、運転席に着座したドライバの頭顔位置に赤外線を投光する赤外投光器4bと、その赤外投光器4bによって投光されているドライバの頭顔を撮影する近赤外光カメラ4aとを備える。5は、自車両の車速を検出する車速センサである。6は、自車両に設けられたワイパーの起動停止や動作速度(周期)等の動作状態を設定可能なワイパースイッチである。
【0020】
7は、自車両前方を撮影するCCDカメラ等の可視光カメラである。
【0021】
8は、赤外光カメラ3により撮影された画像(以下、赤外線画像)を表示する液晶表示器またはヘッドアップディスプレイ等のディスプレイである。ここで、ディスプレイ8は、自車両の運転席前方であってドライバが前方を凝視したときに大きな視線移動を行わずに容易に赤外線画像を見ることができる位置(ダッシュボードの中央位置近傍であってもよい)に配設すると良い。
【0022】
9は、ドライバがハンドル(ステアリングホイール)を操作することによって車両を操舵するのに要する操作力を調整する一般的な操舵反トルク調整ユニットである。
【0023】
10は、ドライバへの報知を音声ガイダンスにより行う音声出力ユニットである。11は、ディスプレイ8への赤外線画像の表示モードを操作者が切り替え可能なモード切り替えスイッチである。このスイッチにより選択可能な表示モードには、操作者がマニュアルオン・オフスイッチ16をオン状態としている間はディスプレイ8に赤外光画像を表示させるマニュアルモードと、モード切り替えスイッチ11にてオートモードが選択された場合に、後述する表示制御処理に応じて赤外線画像をディスプレイ8に表示させるオートモードとがある。12は、表示制御装置1への電源供給を操作者がオン・オフ可能な電源スイッチである。
【0024】
マニュアルオン・オフスイッチ16は、モード切り替えスイッチ11にてマニュアルモードが選択されている場合において、操作者がオン状態に設定している間はディスプレイ8に赤外線画像を表示させるスイッチである。
【0025】
そして、表示制御装置1は、上記の各センサの出力信号(出力信号に相当するデータ)と、検出した各操作スイッチの操作状態とに基づいて、ディスプレイ8に赤外線画像の表示を制御する(詳細は後述する)。この表示制御装置1による表示制御処理は、RAM102をワークエリアとして使用しながら、予めROM103等に格納されたソフトウエアに従って、CPU101により実行される。
【0026】
次に、本実施形態において表示制御装置1が行う具体的な表示制御処理について説明する。
【0027】
図2は、第1の実施形態に係る車両の表示装置による表示制御処理のフローチャートであり、自車両のイグニッションキースイッチがオンであって、且つ電源スイッチ12がオンの期間にCPU101が実行するソフトウエアの手順を示す。
【0028】
同図において、ステップS1:モード切り替えスイッチ11の操作状態を検出することにより、オートモードが選択されているか否かを判断し、この判断でNO(マニュアルモード)のときにはステップS2に進み、YES(オートモード)のときにはステップS3に進む。
【0029】
ステップS2:マニュアルモードが選択されているため、マニュアルオン・オフスイッチ16がオン状態に設定されているか否かを判断し、この判断でYES(当該スイッチ13:オン)のときには赤外線画像の表示を開始または継続させるべくステップS13に進み、NO(当該スイッチ13:オフ)のときには赤外線画像の表示を停止させるべくステップS12に進む。
【0030】
ステップS3:オートモードが選択されているため、車速センサ5の出力信号に相当するデータと、ワイパースイッチ6及びフォグランプスイッチ13の操作状態を表わす信号とを読み込む。
【0031】
ステップS4:ROM103に予め記憶されているマップ(テーブル)を参照することにより、赤外線画像のディスプレイ8への表示を行うか否かを判断する際の基準となる表示開始しきい値Thを設定する。このマップに記憶する表示開始しきい値Thの具体的な特性としては、ステップS3にて入手した車速が速いときほど大きなしきい値を設定すれば良い。また、ステップS3にて入手したワイパースイッチ6の操作状態が大きな作動速度を表わすときほど(即ち、作動周期が短いほど)大きなしきい値に設定すれば良い。或いは、ステップS3にて入手したフォグランプスイッチ13の操作状態が点灯状態を表わすときには消灯状態のときと比較して大きなしきい値を設定すれば良い。
【0032】
ステップS5:障害物センサ2の出力信号に相当するデータを入手することにより、自車両前方の障害物の存在位置及びその障害物と自車両との距離Dを入手する。
【0033】
ステップS6:ROM103に予め記憶されているマップ(テーブル)を参照することにより、赤外線画像の表示を開始する旨の音声出力ユニット10による警報(ガイダンス)の発報タイミングから、赤外線画像の表示を開始させるまでの遅延時間Tを設定する。このマップに記憶する遅延時間Tの具体的な特性としては、ステップS5にて入手した距離Dが短いときほど短い時間に設定すれば良い。或いは、ステップS3にて入手した車速が速いときほど短い時間に設定すれば良い。
【0034】
ステップS7:ステップS5にて入手した障害物センサ2の出力信号に相当するデータに、障害物の存在を表わす情報(位置及び距離D)が含まれているか否かを判断し、この判断でNO(障害物無し)のときにはステップS8に進み、YES(障害物有り)のときにはステップS9に進む。
【0035】
ステップS8:自車両の前方に障害物が存在しないときであっても、濃霧等の天候状態によって前方の視認性が良くないときには、赤外線画像を表示してドライバの運転支援を行うべきであるため、本ステップでは、ステップS3にて入手したフォグランプスイッチ13の操作状態がオンのとき、またはステップS3にて入手したワイパースイッチ6の操作状態が低速(或いは間欠)作動を表わすか否かを判断し、この判断でYES(フォグランプ点灯中またはワイパー低速作動中)のときには、前方の視認性が良くないと推定できるため赤外線画像の表示を開始または継続させるべくステップS13に進み、NO(フォグランプ消灯中またはワイパー停止中)のときには赤外線画像の表示を停止させるべくステップS12に進む。
【0036】
ステップS9:自車両の前方に障害物が存在するため、赤外線画像の表示を行うか否かを判断すべく、ステップS5にて入手した障害物までの距離Dが、ステップS6にて設定した表示開始しきい値Thより小さいか否かを判断し、この判断でNO(D≧Th)のときには赤外線画像の表示は必要無いと判断できるためステップS12に進み、YES(D<Th)のときにはステップS10に進む。
【0037】
ステップS10:赤外線画像の表示を開始するのに先立って、その旨を報知する音声ガイダンスを音声出力ユニット10により報知する。
【0038】
ステップS11:ステップS10にて音声出力を行ったタイミングから、ステップS6にて設定した遅延時間Tだけ経過したか否かを判断し、この判断でYESの(遅延時間Tが経過した)ときには赤外線画像の表示を開始させるべくステップS13に進み、NOの(遅延時間Tの計時中)ときには赤外線画像の表示を行わないためにステップS12に進む。
【0039】
ステップS12:赤外線画像のディスプレイ8への表示を停止または禁止し、リターンする。
【0040】
ステップS13:赤外線画像のディスプレイ8への表示を開始または継続させ、リターンする。
【0041】
上述した本実施形態によれば、自車両前方に障害物が存在しないときであっても、フォグランプスイッチ13またはワイパースイッチ6の操作状態に応じて前方の視認性が悪いと推定したときには赤外線画像が自動的に表示され、一方、障害物が存在するときには、その障害物との離間距離Dに応じて赤外線画像の表示のオン・オフが的確に制御されるため、ドライバに違和感を与えることなく、走行環境に応じた運転支援を的確に行うことができる。
【0042】
また、本実施形態では、赤外線画像の表示が必要と判断したときに、その表示開始に先立って表示を開始する旨の音声ガイダンスを音声出力ユニット10から出力することにより、ディスプレイ8に赤外線画像の表示がが急に開始されることによってドライバを驚かせることを防止することができる。
【0043】
更に、赤外線画像の表示を開始するか否かの判断基準として使用する表示開始しきい値Th、遅延時間Tを、検出した車速等に応じた最適な値を使用しているため、きめ細かい的確な表示制御を行うことができる。
【0044】
[第2の実施形態]
次に、上述した第1の実施形態に係る車両の表示装置を基本とする第2の実施形態を説明する。以下の説明においては、第1の実施形態と同様な構成については重複する説明を省略し、本実施形態における特徴的な部分を中心に説明する。
図3は、第2の実施形態に係る車両の表示装置による表示制御処理のフローチャートであり、自車両のイグニッションキースイッチがオンであって、且つ電源スイッチ12がオンの期間にCPU101が実行するソフトウエアの手順を示す。
【0045】
同図において、ステップS11及びステップS12の処理は、第1の実施形態(図2)におけるステップS1及びステップS2の処理と同様である。
【0046】
ステップS13,ステップS14:障害物センサ2の出力信号に相当するデータを入手することにより、自車両前方の障害物の存在位置及びその障害物と自車両との距離Dを入手し(ステップS13)、その入手したデータに、障害物の存在を表わす情報(位置及び距離D)が含まれているか否かを判断し(ステップS14)、この判断でNO(障害物無し)のときにはステップS15に進み、YES(障害物有り)のときにはステップS16に進む。
【0047】
ステップS15:第1の実施形態(図2)におけるステップS8と同様に前方の視認性を判断し、視認性が悪いと判断したときにはステップS22に進み、視認性は特に悪くないと判断したときにはステップS21に進む。
【0048】
ステップS16:ステップS14にて障害物センサ2の出力信号に相当するデータにより存在が確認された障害物と、可視光カメラ7により撮影した画像(以下、可視光画像)内における当該障害物に相当する画像部分とを関連付けすることにより、当該可視光画像内における当該障害物の存在領域を設定すると共に、その設定した障害物存在領域の輝度コントラストCを算出する。ここで、可視光画像は、可視光カメラ7自体が出力する、或いは可視光カメラ7が接続される表示制御装置1内の不図示の入力インタフェースが生成するデジタル多値画像データである。
【0049】
まず、可視光画像内における障害物存在領域の設定方法について説明する。
【0050】
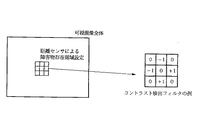
図4は、可視光カメラ7により撮影した画像例と、その画像に設定した座標軸を示す図である。また、図5は、障害物センサ2の検出範囲を上から見た様子を示す図であり、その検出範囲内に、図4に例示した可視光カメラ7による撮影画像に対応するところの、障害物A(先行する他車両)と障害物B(歩行者)とが含まれる場合を示している。
【0051】
本実施形態において、障害物センサ2による障害物A及び障害物Bの検出結果は、自車両と障害物Aとの距離Da及び中心軸とのなす角度θa(≒0)、並びに自車両と障害物Bとの距離Db及び中心軸との角度θbとして得られる。
【0052】
従って、障害物センサ2の検出範囲における中心軸と、可視光カメラ7の撮像面(画角)の座標軸との位置関係を予め対応させておけば、障害物センサ2から出力される障害物までの距離D及び角度θを、当該撮像面において、図4に示すように、距離Dは当該撮像面の下辺からのライン数(画素数)としてカウントし、角度θは、当該撮像面の左右の中心線からの画素数としてカウントすることにより、そのカウントによって特定される当該撮像面内の画素(画素群)は、障害物センサ2によって検出された障害物の全体形状に相当すると判断できる。従って、このような処理を行えば、可視光カメラ7の撮影画像に含まれる障害物と、その障害物までの距離Dとを関連付けることができ、更に、当該障害物を構成する画素群を含む矩形を当該座標軸の座標系において設定することにより、可視光画像に含まれる障害物検出領域を、表示制御装置1に設定することができる。
【0053】
次に、上記の如く設定された障害物検出領域のコントラストCの具体的な算出方法について説明する。
【0054】
まず、M×N(M,Nは自然数)画素のデジタル多値画像データである可視光画像に、所謂エッジ検出処理として、図6に例示するコントラスト検出用のフィルタ(3×3画素の行列)を順次施し、これにより、可視光画像を構成する各画素のコントラスト値を求める。そして、その算出したコントラスト値のうち、当該障害物の画像が含まれる画像領域(障害物存在領域)を構成する各画素のコントラスト値の総和を算出することにより、障害物検出領域のコントラストCを算出することができる。
【0055】
ステップS17:第1の実施形態(図2)におけるステップS6と同様に遅延時間Tを設定する。
【0056】
ステップS18:ステップS16にて算出したコントラストCが所定の表示しきい値Thaより大きいか否かを判断する。この判断でYES(C>Tha)のときには、可視光画像に含まれる障害物とその周囲とのコントラストがはっきりしており、自車両前方をドライバが見た場合にも当該障害物の存在を肉眼で十分認識できる程度の視認性があると推定できるため、赤外線画像の表示を停止すべくステップS21に進む。逆に、当該判断でNO(C≦Tha)のときには、コントラストがはっきりしないため、自車両前方をドライバが見た場合にも当該障害物の存在を肉眼では認識し難く、前方の視認性は悪いと判断できるため、赤外線画像の表示を開始または継続させるべくステップS19以降の処理に進む。
【0057】
ステップS19〜ステップS22:第1の実施形態(図2)におけるステップS19からステップS22までと同様の処理を行う。
【0058】
上述した本実施形態によれば、自車両前方に障害物が存在しないときであっても、フォグランプスイッチ13またはワイパースイッチ6の操作状態に応じて前方の視認性が悪いと推定したときには赤外線画像が自動的に表示され、一方、障害物が存在するときには、可視光カメラ7による可視光画像に含まれる当該障害物のコントラストCを算出すると共に、その算出結果に基づいて前方の視認性を走行環境として推定し、その推定結果に応じて赤外線画像の表示のオン・オフが的確に制御されるため、ドライバに違和感を与えることなく、走行環境に応じた運転支援を的確に行うことができる。
【0059】
また、本実施形態においても、赤外線画像の表示が必要と判断したときに、その表示開始に先立って表示を開始する旨の音声ガイダンスを音声出力ユニット10から出力することにより、ディスプレイ8に赤外線画像の表示がが急に開始されることによってドライバを驚かせることを防止することができる。
【0060】
[第3の実施形態]
次に、上述した第1の実施形態に係る車両の表示装置を基本とする第3の実施形態を説明する。以下の説明においては、第1の実施形態と同様な構成については重複する説明を省略し、本実施形態における特徴的な部分を中心に説明する。
【0061】
図7は、第3の実施形態に係る車両の表示装置による表示制御処理のフローチャートであり、自車両のイグニッションキースイッチがオンであって、且つ電源スイッチ12がオンの期間にCPU101が実行するソフトウエアの手順を示す。
【0062】
同図において、ステップS31:頭顔位置検出ユニット4の出力信号に基づいて、ドライバの頭顔の向き(ずれ量)が所定値以上であるか否かを判断することにより、ドライバが車両前方を見ているか、或いは側方を向いている(脇見をしている)かを判断する。近赤外光カメラ4a及び赤外投光器4bからなる頭顔位置検出ユニット4の出力信号を利用したドライバの頭顔位置の検出方法は、現在では一般的であり、本実施形態における詳細な説明は省略するが、ここでその検出方法を概説する。
【0063】
図8は、第3の実施形態における頭顔位置検出ユニット4によるドライバの頭顔方向の検出方法を説明する図である。
【0064】
図8(a)及び図8(b)は、赤外投光器4bに投光された状態のドライバの頭顔を近赤外光カメラ4aによって撮影した画像を示しており、図8(a)は前方を注視しているとき、図8(b)は側方を向いている(脇見をしている)ときを示す。具体的な検出方法としては、赤外投光器4bによって投光されているドライバの頭顔を近赤外光カメラ4aによって撮影すると、その撮影された画像内において、角膜反射によってドライバの瞳孔部分が明るく撮影されるので、正面を向いているときの瞳孔位置(図8(a))を基準位置として記憶し、その基準位置に対する瞳孔位置のずれ量Lを検出し、そのずれ量Lが所定値を越えたときには側方を向いていると判断すれば良い。また、基準位置の設定方法としては、近赤外光カメラ4aの撮影信号に対して一般的な2値化処理や特徴点の抽出処理を行うことによってドライバの頭顔部の画像を抽出し、その抽出した頭顔部の画像内に、図8(a)の如く瞳孔が略対象な位置に存在するときを、正面を注視している基準位置として検出すれば良い。
【0065】
そして、ステップS31の判断において、YESのとき(ドライバが側方を向いているとき)には、赤外線画像(赤外光カメラ3による車両前方の映像)のディスプレイ8への表示を停止すべくステップS43に進み、NOのとき(ドライバが正面を向いているとき)には、ステップS32に進む。
【0066】
ステップS32,ステップS33:ステップS32及びステップS33の処理は、第1の実施形態(図2)におけるステップS1及びステップS2の処理と同様である。
【0067】
ステップS34:第1の実施形態(図2)におけるステップS5と同様に、障害物センサ2の出力信号に相当するデータを入手することにより、自車両前方の障害物の存在位置及びその障害物と自車両との距離Dを入手する。
【0068】
ステップS35:第1の実施形態(図2)におけるステップS7と同様に、ステップS34にて入手した障害物センサ2の出力信号に相当するデータに、障害物の存在を表わす情報(位置及び距離D)が含まれているか否かを判断し、この判断でNO(障害物無し)のときにはステップS36に進み、YES(障害物有り)のときにはステップS37に進む。
【0069】
ステップS36:第1の実施形態(図2)におけるステップS8と同様に前方の視認性を判断し、この判断で前方の視認性が良くないと推定したときには赤外線画像の表示を開始または継続させるべくステップS42に進み、NOのときには赤外線画像の表示を停止させるべくステップS43に進む。
【0070】
ステップS37及びステップS38:第1の実施形態(図2)におけるステップS4及びステップS6と同様に表示開始しきい値Th及び遅延時間Tを設定する。
【0071】
ステップS39〜ステップS44:第1の実施形態(図2)におけるステップS9からステップS13までの処理と同様に、赤外線画像を停止させる、或いは、設定した表示開始しきい値Thに応じて表示を開始するのに先立って音声ガイダンスを出力し、その後、遅延時間T経過後に赤外線画像の表示を開始する。
【0072】
ステップS44からステップS47においては、ディスプレイ8への赤外線画像の表示を開始することによってドライバが驚き(動揺し)、不必要な急なハンドル操作を行うことを防止すべく、所謂ハンドルを重くするために、表示開始後の所定時間にわたって操舵反トルク調整ユニット9により反トルクを発生させる。具体的には、例えば、パワーステアリングのアシスト量を小さくしたり、ドライバによるハンドルの操舵方向とは逆方向の回転トルクを付与すれば良い。
【0073】
即ち、ステップS44,ステップS46:ディスプレイ8への赤外線画像の表示を開始してから所定時間が経過したか否かを判断し、この判断でYESのとき(表示開始後所定時間が経過したとき)には、ステップS46において反トルクの大きさをデフォルトに設定する。
【0074】
ステップS45,ステップS47:ステップS44の判断において、表示開始から所定時間が経過していないと判断したため、舵角センサ15の出力信号に基づいて、ドライバによるハンドルの回転角速度が所定の角速度以上であり、且つ舵角が所定の角度以上であるかを判断する。ここで、回転角速度は、舵角センサ15の出力信号の単位時間当たりの変化量を算出すれば良い。
【0075】
この判断において、ハンドルの回転角速度が所定の角速度以上であり、且つ舵角が所定の角度以上であるとき(ステップS45にてYESのとき)には、ドライバはハンドルを回転させる操作を行っている最中であり、その操作中に操舵反トルクを大きくすることは好ましくないため、ステップS46にて反トルクの大きさをデフォルトに設定する。一方、上記の判断において、ハンドルの回転角速度が所定の角速度より遅い、及び/または舵角が所定の角度より小さいとき(ステップS45にてNOのとき)には、操舵反トルク調整ユニット9により、ハンドル操作に要する反トルクの大きさを大きく調整することにより、ドライバの急なハンドル操作を難くする。このとき、操舵反トルク調整ユニット9によって発生させる反トルクの大きさは、車速センサ5によって検出した自車速が速くなるのに比例して反トルクも大きくすると良く、具体的な処理としては、係る特性を予め記憶させたマップ(テーブル)を、自車速に従って本ステップにて参照すれば良い。
【0076】
上述した本実施形態によれば、第1の実施形態と同様な効果に加え、更に、頭顔位置検出ユニット4によりドライバが脇見をしていると判断したときには、ディスプレイ8への赤外線画像の表示を停止させる。これにより、走行環境に応じた運転支援をより的確に行うことができる。
【0077】
また、ドライバが正面を注視しているときに赤外線画像の表示を開始するときには、操舵反トルク調整ユニット9によって所定時間にわたって反トルクを発生させ、これにより、所謂ハンドルを重い状態にすることにより、ディスプレイ8への赤外線画像の表示が開始されることによってドライバが驚き、急なハンドル操作を行うことを防止することができる。
【0078】
上述した第3の実施形態は、ディスプレイ8が、赤外光カメラ3による赤外線画像をドライバの前方において透過させた状態で表示させるタイプである場合に特に有効である。即ち、このような透過式のディスプレイにおいて、ドライバは、赤外光カメラ3により撮影された赤外線画像を、自車両の前方の実際の風景にオーバーラップされた状態で認識することになる。この場合、ドライバが側方を見ているときにも当該ディスプレイに赤外線画像が表示されたままの状態が継続することはドライバに違和感を与えることになるが、本実施形態によれば、ドライバが側方を見ていると判断したときには、ディスプレイ8への赤外線画像の表示が停止するので、ドライバに違和感を与えることはない。
【0079】
更に、本実施形態では、ドライバが前方を注視していることを検出したときには、赤外線画像の表示開始に先立って音声ガイダンスが出力されると共に、表示開始後の所定時間はハンドル操作に要する操作力が大きくなるように操舵反トルク調整ユニット9を制御しているため、ディスプレイ8として上記の透過型のディスプレイを採用する場合の操作性及び安全性をより向上させることができる。
【図面の簡単な説明】
【図1】本発明の第1の実施形態における車両の表示装置のブロック構成図である。
【図2】第1の実施形態に係る車両の表示装置による表示制御処理のフローチャートである。
【図3】第2の実施形態に係る車両の表示装置による表示制御処理のフローチャートである。
【図4】可視光カメラ7により撮影した画像例と、その画像に設定した座標軸を示す図である。
【図5】障害物センサ2の検出範囲を上から見た様子を示す図である。
【図6】コントラスト検出用のフィルタを例示する図である。
【図7】第3の実施形態に係る車両の表示装置による表示制御処理のフローチャートである。
【図8】第3の実施形態における頭顔位置検出ユニット4によるドライバの頭顔方向の検出方法を説明する図である。
【符号の説明】
1:表示制御装置,
2:障害物センサ,
3:赤外光カメラ,
4:操舵反トルク調整ユニット,
5:車速センサ,
6:ワイパースイッチ,
7:可視光カメラ,
8:ディスプレイ,
9:操舵反トルク調整ユニット,
10:音声出力ユニット,
11:モード切り替えスイッチ,
12:電源スイッチ,
13:フォグランプスイッチ,
16:マニュアルオン・オフスイッチ,
15:舵角センサ,
101:CPU,
102:RAM,
103:ROM,
Claims (3)
- 車両に設けられ、その車両の前方を赤外線を利用して撮影する撮影装置と、
前記撮影装置によって撮影された画像を、該車両の運転席前方に表示する表示器と、
前記車両の前方に存在する障害物を検出すると共に、その障害物と該車両との距離を検出する検出手段と、
前記検出手段によって検出された障害物と前記車両との距離が所定値より短くなったときに、前記撮影装置により撮影された画像を前記表示器に表示させる表示制御手段と、
前記車両のステアリングホイールの操舵反力を調整する調整手段と、
を備え、
前記表示制御手段は、前記表示器への画像表示を開始したときは、前記検出手段によって検出された前記障害物の画像の表示開始に伴うドライバの急ハンドル操作を防止すべく所定時間に限り、該所定時間外における操舵反力よりも大きな操舵反力を前記調整手段に出力させる
ことを特徴とする車両の表示装置。 - 更に、音声ガイダンスを出力する音声出力手段を備え、
前記表示制御手段は、前記撮影装置により撮影された画像を前記表示器に表示させるのに先立って、前記画像の表示を開始する旨の音声ガイダンスを、前記音声出力手段に出力させる
ことを特徴とする請求項1記載の車両の表示装置。 - 前記表示制御手段は、前記表示器への画像表示を開始してから前記所定時間以内であっても、操舵速度が所定値以上かつ操舵量が所定値以上のときには、前記調整手段による前記所定時間外における操舵反力よりも大きな操舵反力の出力を禁止することを特徴とする請求項1または2に記載の車両の表示装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP25331399A JP3877116B2 (ja) | 1999-09-07 | 1999-09-07 | 車両の表示装置 |
| EP00112786A EP1083076A3 (en) | 1999-09-07 | 2000-06-16 | Display apparatus for vehicle |
| US09/596,860 US6327522B1 (en) | 1999-09-07 | 2000-06-19 | Display apparatus for vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP25331399A JP3877116B2 (ja) | 1999-09-07 | 1999-09-07 | 車両の表示装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2001071843A JP2001071843A (ja) | 2001-03-21 |
| JP2001071843A5 JP2001071843A5 (ja) | 2005-06-16 |
| JP3877116B2 true JP3877116B2 (ja) | 2007-02-07 |
Family
ID=17249569
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP25331399A Expired - Fee Related JP3877116B2 (ja) | 1999-09-07 | 1999-09-07 | 車両の表示装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3877116B2 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4784013B2 (ja) * | 2001-07-31 | 2011-09-28 | トヨタ自動車株式会社 | 視界補助装置 |
| JP2004030212A (ja) * | 2002-06-25 | 2004-01-29 | Toyota Central Res & Dev Lab Inc | 車両用情報提供装置 |
| JP3890597B2 (ja) * | 2003-09-30 | 2007-03-07 | マツダ株式会社 | 車両用情報提供装置 |
| DE10346511B4 (de) * | 2003-10-02 | 2008-01-31 | Daimler Ag | Vorrichtung zur Verbesserung der Sichtverhältnisse in einem Kraftfahrzeug |
| DE10346507B4 (de) * | 2003-10-02 | 2007-10-11 | Daimlerchrysler Ag | Vorrichtung zur Verbesserung der Sichtverhältnisse in einem Kraftfahrzeug |
| DE10346484B4 (de) * | 2003-10-02 | 2007-10-11 | Daimlerchrysler Ag | Vorrichtung zur Verbesserung der Sichtverhältnisse in einem Kraftfahrzeug |
| DE10346508B4 (de) * | 2003-10-02 | 2007-10-11 | Daimlerchrysler Ag | Vorrichtung zur Verbesserung der Sichtverhältnisse in einem Kraftfahrzeug |
| JP4973334B2 (ja) * | 2007-06-26 | 2012-07-11 | ソニー株式会社 | 撮像装置および撮像装置の切り替え方法 |
| JP2009086711A (ja) * | 2007-09-27 | 2009-04-23 | Denso Corp | 車両用事故防止システム |
| JP5484118B2 (ja) * | 2010-02-17 | 2014-05-07 | 本田技研工業株式会社 | 車両の周辺監視装置 |
| JP5841093B2 (ja) * | 2013-03-26 | 2016-01-13 | Necパーソナルコンピュータ株式会社 | 情報処理装置 |
| JP6520634B2 (ja) * | 2014-11-18 | 2019-05-29 | 株式会社デンソー | 車両用の映像切替装置 |
| US9930296B2 (en) | 2014-11-18 | 2018-03-27 | Denso Corporation | Image switching device for vehicle |
| WO2017018027A1 (ja) | 2015-07-29 | 2017-02-02 | 富士フイルム株式会社 | 投写型表示装置及び投写制御方法 |
| DE112021001292T5 (de) * | 2020-02-28 | 2023-01-26 | Nippon Seiki Co., Ltd. | Anzeigevorrichtung für Fahrzeuge |
-
1999
- 1999-09-07 JP JP25331399A patent/JP3877116B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001071843A (ja) | 2001-03-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107444263B (zh) | 车辆用显示装置 | |
| JP3877116B2 (ja) | 車両の表示装置 | |
| US8035493B2 (en) | Head-up display device for vehicle | |
| US8937558B2 (en) | Image generating apparatus and image display system | |
| US6327522B1 (en) | Display apparatus for vehicle | |
| US8941737B2 (en) | Image generating apparatus and image display system | |
| EP3466763B1 (en) | Vehicle monitor system | |
| JP3228086B2 (ja) | 運転操作補助装置 | |
| JP2004058828A (ja) | 車両前方表示システム | |
| JP2003081014A (ja) | 車両周辺監視装置 | |
| JP4699054B2 (ja) | 車両周囲監視装置 | |
| JP6361988B2 (ja) | 車両用表示装置 | |
| JP2005186648A (ja) | 車両用周囲視認装置および表示制御装置 | |
| JP3906892B2 (ja) | 駐車支援装置 | |
| JP3884815B2 (ja) | 車両用情報表示装置 | |
| JP2009073250A (ja) | 車両後方表示装置 | |
| JP3739269B2 (ja) | 車両運転支援装置 | |
| JP2006298318A (ja) | 周辺監視装置 | |
| JP2004051063A (ja) | 車両周辺視認装置 | |
| JP2001071790A (ja) | 車両の表示装置 | |
| JP4033170B2 (ja) | 車両用表示装置 | |
| JP4720979B2 (ja) | 車両用監視装置 | |
| RU2694877C2 (ru) | Устройство формирования изображений и отображения для транспортного средства и носитель записи | |
| KR20170064134A (ko) | 헤드업 디스플레이의 표시 제어 장치 및 방법 | |
| JP3898056B2 (ja) | 車両周辺監視システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040916 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040916 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7426 Effective date: 20040916 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20040916 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060627 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060823 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20061013 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20061026 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |